STM32+CubeMX移植SPI协议驱动W25Q16FLash存储器
STM32+CubeMX移植SPI协议驱动W25Q16FLash存储器
- SPI简介
- 拓扑结构
- 时钟相位(CPHA)和时钟极性( CPOL)
- W25Q16简介
- 什么是Flash,有什么特点?
- W25Q16内部块、扇区、页的划分
- 引脚定义
- 通讯方式
- 控制指令
- 原理图
- CubeMX配置
- 驱动代码
- 运行结果
W25Q16 是一种常见的串行闪存(Flash)存储器芯片,由 Winbond 公司生产。它是一种高性能、低功耗的闪存存储器,采用的是SPI通讯协议,想要想使用W25Q16,就必须要先会SPI协议。
SPI简介
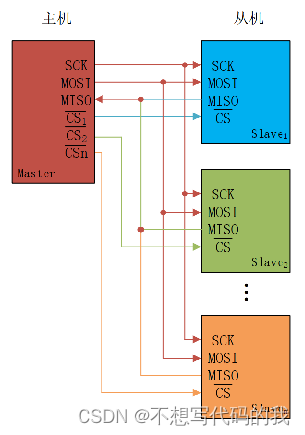
SPI(Serial Peripheral Interface)是一种常用的串行通信协议,通常用于在数字集成电路之间进行通信,如微控制器、传感器、存储器、显示器等。SPI 协议定义了一种全双工、同步的串行数据传输方式,它通常由一个主设备(Master)和一个或多个从设备(Slave)组成。
SPI 协议的主要特点包括:
-
全双工通信:主设备和从设备可以同时发送和接收数据,这使得 SPI 通信速度较快。
-
同步通信:通信时钟由主设备生成,主设备控制数据传输的时序。这种同步方式可以提供较高的通信速率。
-
多从设备支持:SPI 允许主设备与多个从设备进行通信,每个从设备都有一个片选信号(Chip Select),用于选择要通信的目标设备。
-
单主多从结构:在标准的 SPI 总线中,通常只有一个主设备,多个从设备。但是,也有一些扩展协议支持多主设备的情况。
-
串行传输:数据在时钟的边沿进行传输,可以是上升沿或下降沿,取决于设备的配置。
SPI 协议通常由以下几条信号线组成:
-
SCLK(Serial Clock):时钟信号,由主设备产生,用于同步数据传输。
-
MOSI(Master Out Slave In):主设备输出、从设备输入的数据线。
-
MISO(Master In Slave Out):主设备输入、从设备输出的数据线。
-
SS/CS(Slave Select/Chip Select):片选信号,由主设备控制,用于选择要通信的从设备。
由于本篇章的重点是W25Q16芯片介绍,所以这里不做过多的介绍SPI通讯协议,基础内容可以浏览:蓝桥杯单片机学习——SPI协议&DS1302实时时钟,这里介绍以下STM32上SPI的几个重要概念:
拓扑结构
时钟相位(CPHA)和时钟极性( CPOL)
- 时钟极性( CPOL):在没有数据传输时时钟线的电平状态,0表示空闲时低电平,1表示空闲时高电平。
- 时钟相位(CPHA:时钟线在第几个时钟边沿采集数据,0表示在第一个边沿开始采集,1表示在第二个边沿开始采集。
- 不同的时钟相位和时钟极性,可以得到不同的SPI工作频率:

W25Q16简介
W25Q16 是一种常见的串行闪存(Flash)存储器芯片,由 Winbond 公司生产。W25Q16采用的是SPI通讯协议,支持STM32的SPI数据传输时序0(CPOL = 0 ,CPHA = 0)和模式3(CPOL = 1,CPHA = 1),数据格式是长度为8位,MSB在前,LSB在后。它是一种高性能、低功耗的闪存存储器,具有以下特点:
-
存储容量:W25Q16 芯片的存储容量为16 Megabit(Mb),相当于2 Megabyte(MB),其中1 Byte = 8 bit。
-
接口:W25Q16 使用 SPI(Serial Peripheral Interface)串行接口进行通信,这使得它易于与各种微控制器和数字集成电路进行连接。
-
工作电压:典型的工作电压为2.7V 至 3.6V,支持广泛的供电范围,适用于各种电源条件下的应用。
-
工作温度:W25Q16 在工业级温度范围内(-40°C 至 +85°C)可靠工作,适用于工业和商业应用环境。
-
封装:W25Q16 芯片通常采用表面贴装封装(Surface Mount Package),如8-pin SOIC(Small Outline Integrated Circuit)封装,方便集成到电路板上。
-
快速擦除和编程:W25Q16 支持快速擦除和编程操作,使得数据更新和存储操作更加高效。
-
多种保护功能:W25Q16 芯片提供了多种保护功能,如写保护功能、全片擦除保护、写使能锁定等,有助于提高数据的安全性和可靠性。
其他型号的Flas芯片,主要差距体现在存储器大小,比如W25Q32就是存储容量为32Mb = 4MB
什么是Flash,有什么特点?
- FLASH是常用的用于储存数据的半导体器件,它具有容量大,可重复擦写、按“扇区/块”擦除、掉电后数据可继续保存的特性。
- FLASH是有一个物理特性:只能写0,不能写1,写1靠擦除。
- FLASH主要有NOR Flash和NAND Flash两种类型,NOR和NAND是两种数字门电路。
- NOR Flash:基于字节读写,读取速度快,独立地址/数据线,无坏块,支持XIP,常见的应用有25QXX系列芯片和存储程序的ROM
- NAND FLASH:基于块读写,读取速度稍慢,地址数据线共用,有坏块,不支持XIP,常见的应用有EMMC、SSD、U盘等
XIP:一般来说,处理器都是在flash上读取代码,到RAM里面执行,这样读取效率相对会低,而XIP则是支持处理器直接在FLash上读取程序并执行,可以提高运行效率。
W25Q16内部块、扇区、页的划分
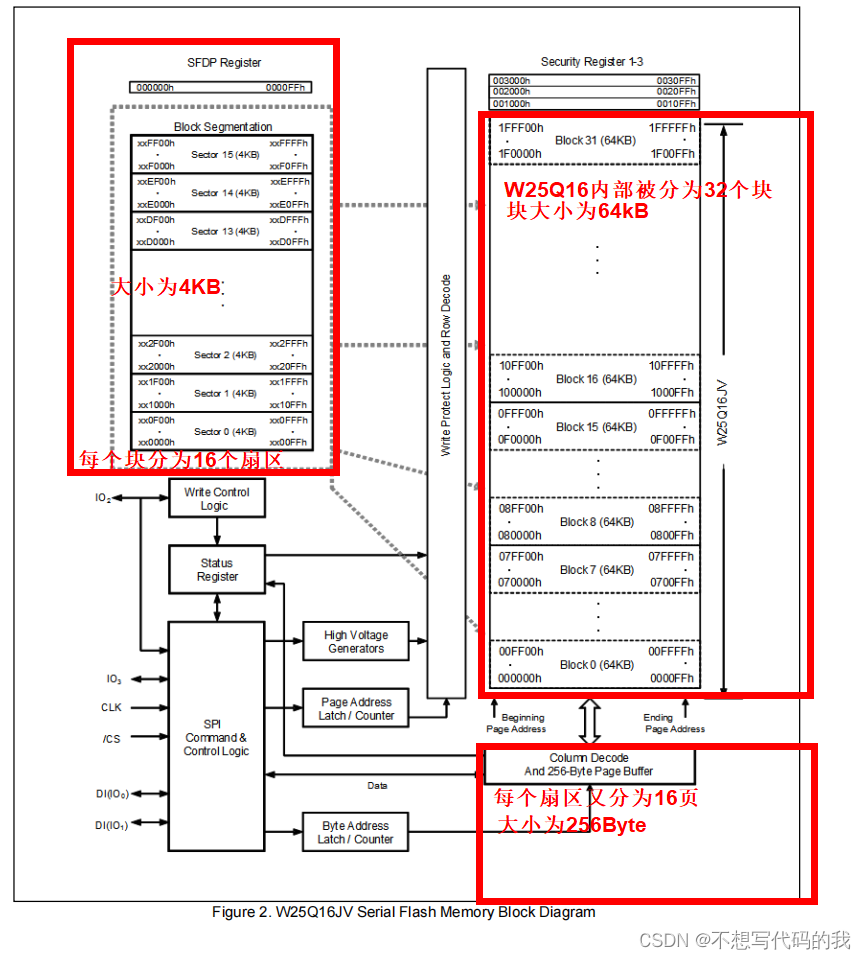
- W25Q16将内部的存储空间分为了32个块,每个块大小64KB
- 每个块分为16个扇区,大小为4KB
- 每个扇区分作16个页,每个页为256个字节,页是Flash读写操作的最小单位。
- W25Q16共有16 * 16 * 32 = 8192个页
Flash存储器存在坏块的情况,当某一个页损坏而无法读写时,可能会导致整个块读写过程中某个数据读写异常而无法使用,且这种损坏是不可逆的,换句话来说,一个页损坏,会导致整个块无法正常读写,只能使用其他块进行读写,导致Flash容量下降。
引脚定义
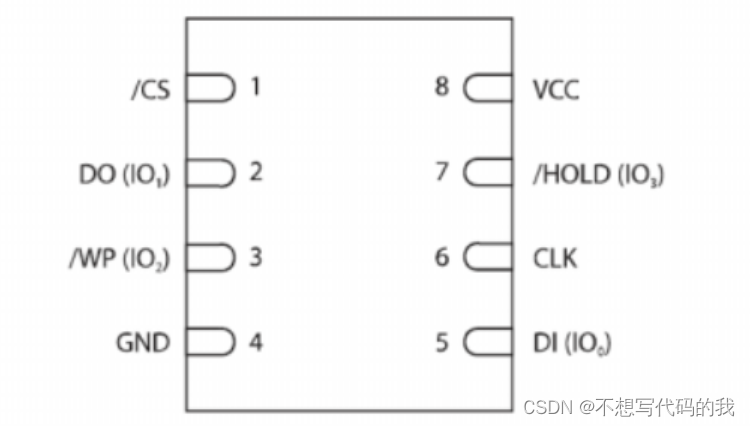
- /CS:片选信号,低电平有效,用作SPI通讯使用
- DO(IO1):数据输出引脚(MISO)
- /WP(IO2):写保护引脚,低电平有效
- GND:接地
- DI(IO4):数据输入引脚(MOSI)
- CLK:SPI时钟引脚
- /HOLD(IO3):暂停通讯引脚,高电平有效
- VCC:电源引脚
通讯方式
控制指令
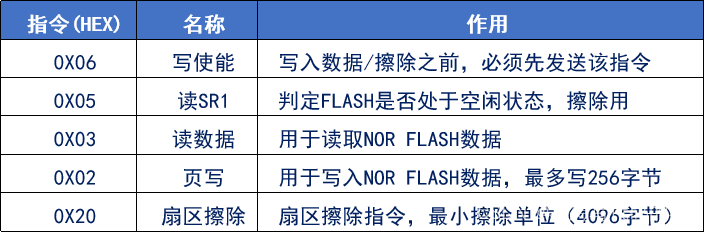
在对W25Q16进行操作之前,需要先发送指令,以控制W25Q16,以下是所有的指令集:
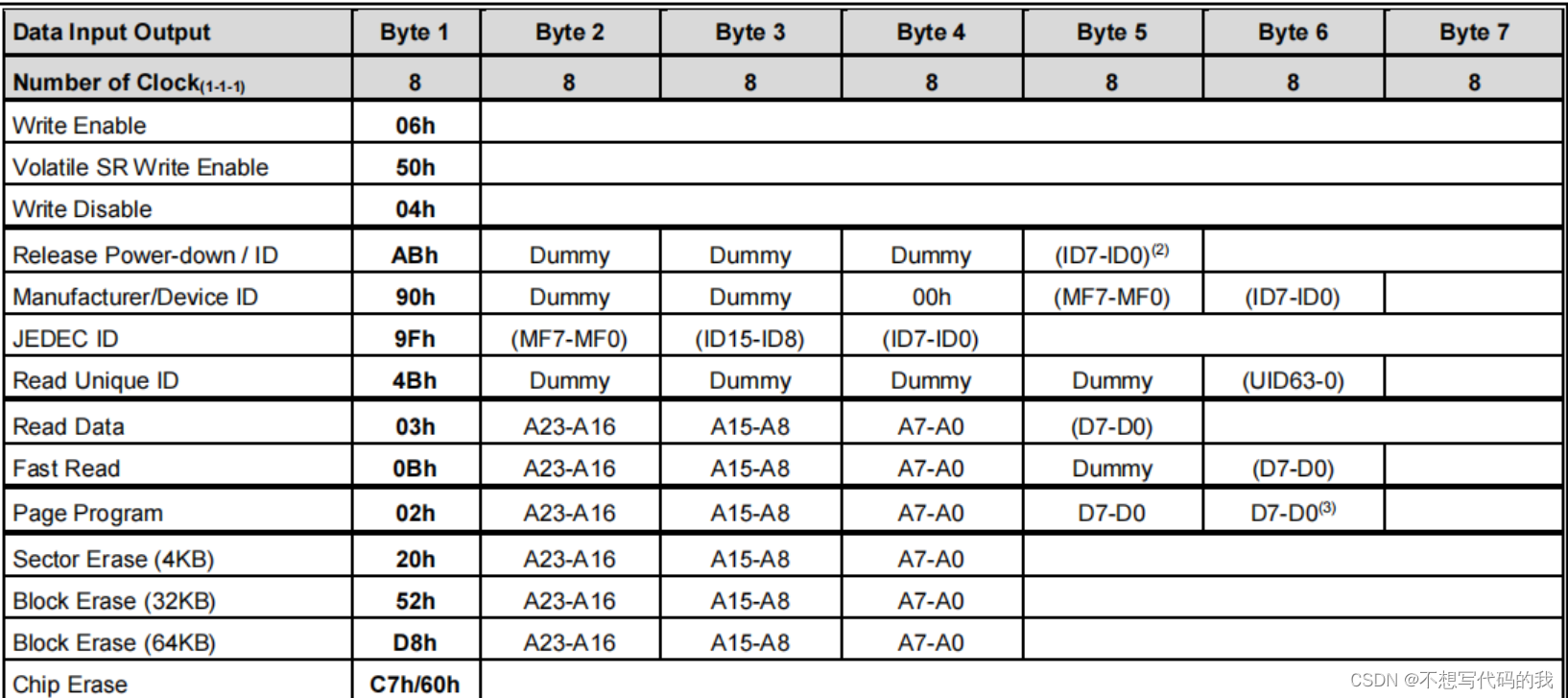
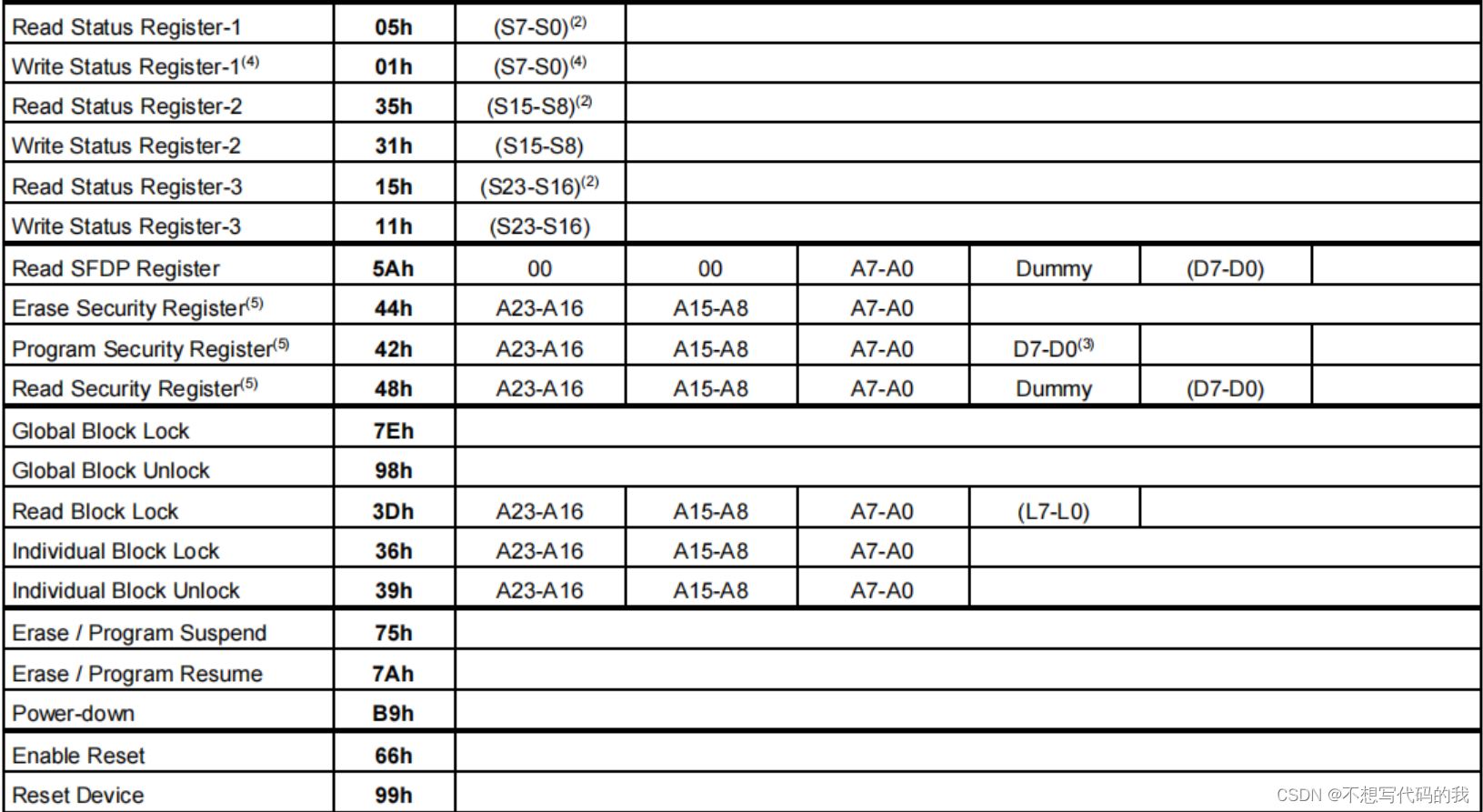
通常,我们对W25Q16进行读写操作,只需要以下几条指令即可完成:
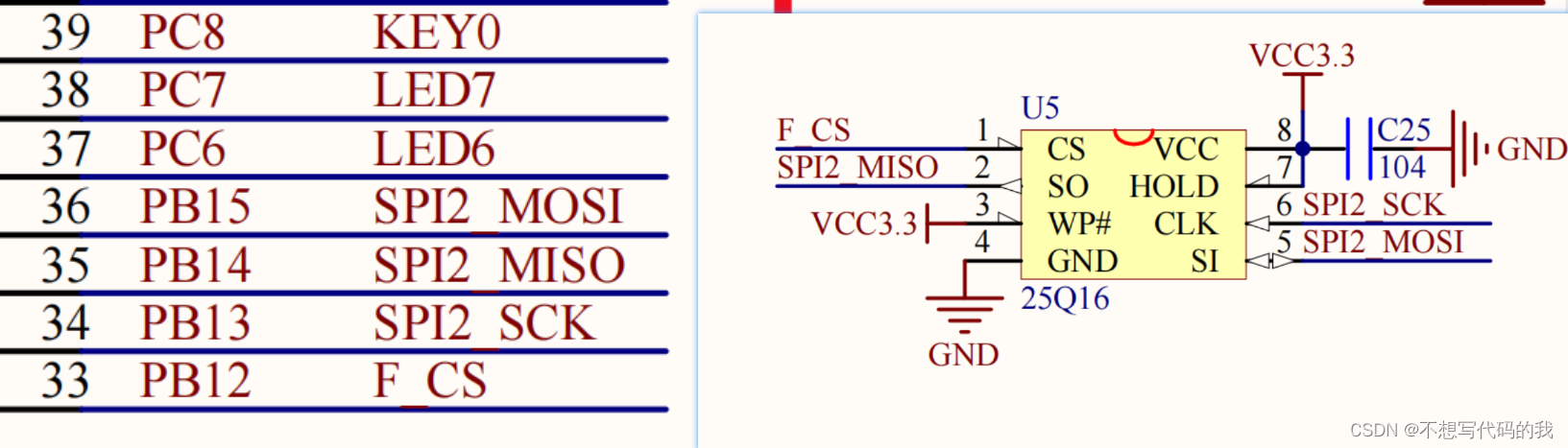
原理图
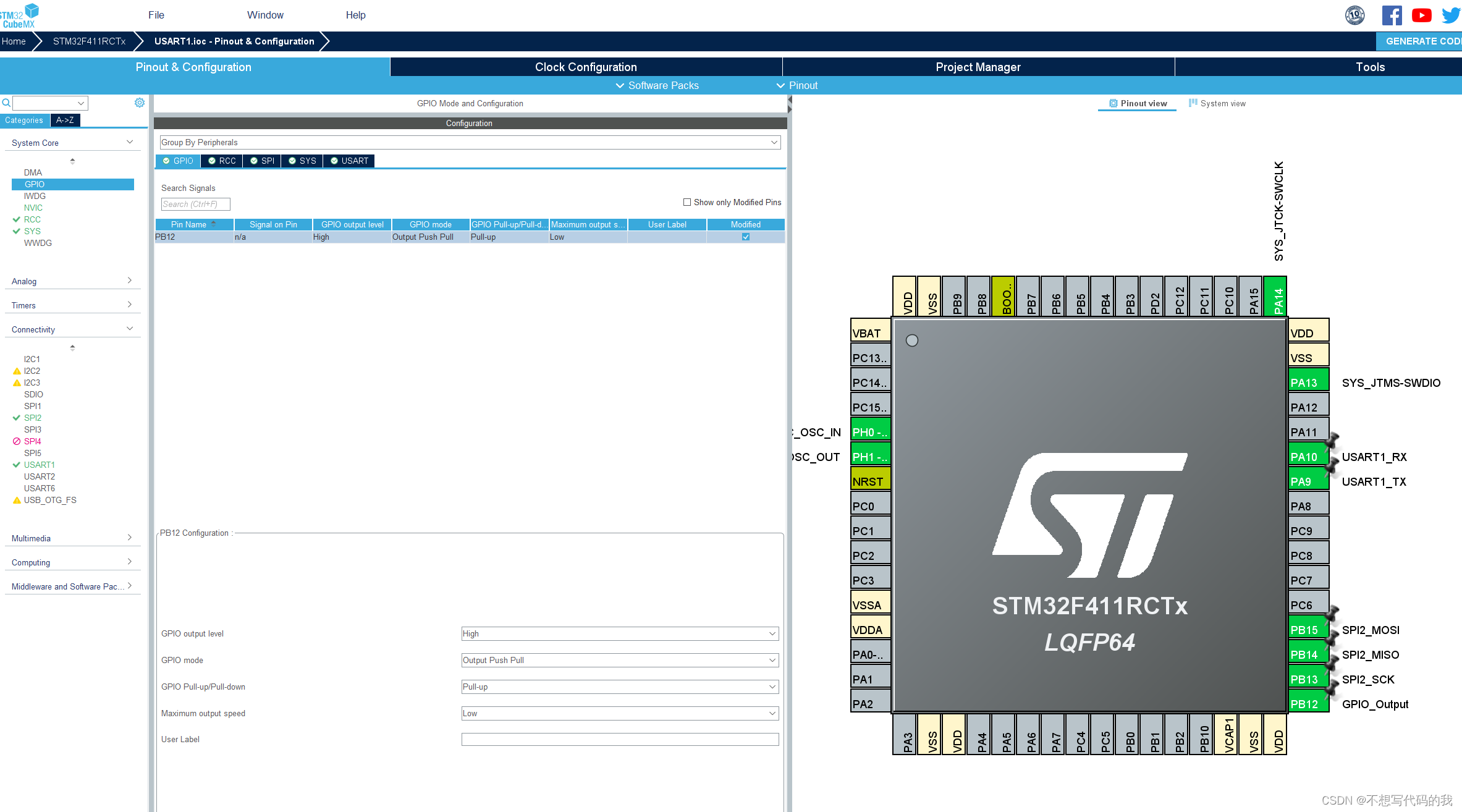
CubeMX配置
-
SPI配置:注意芯片引脚和原理图对应上。
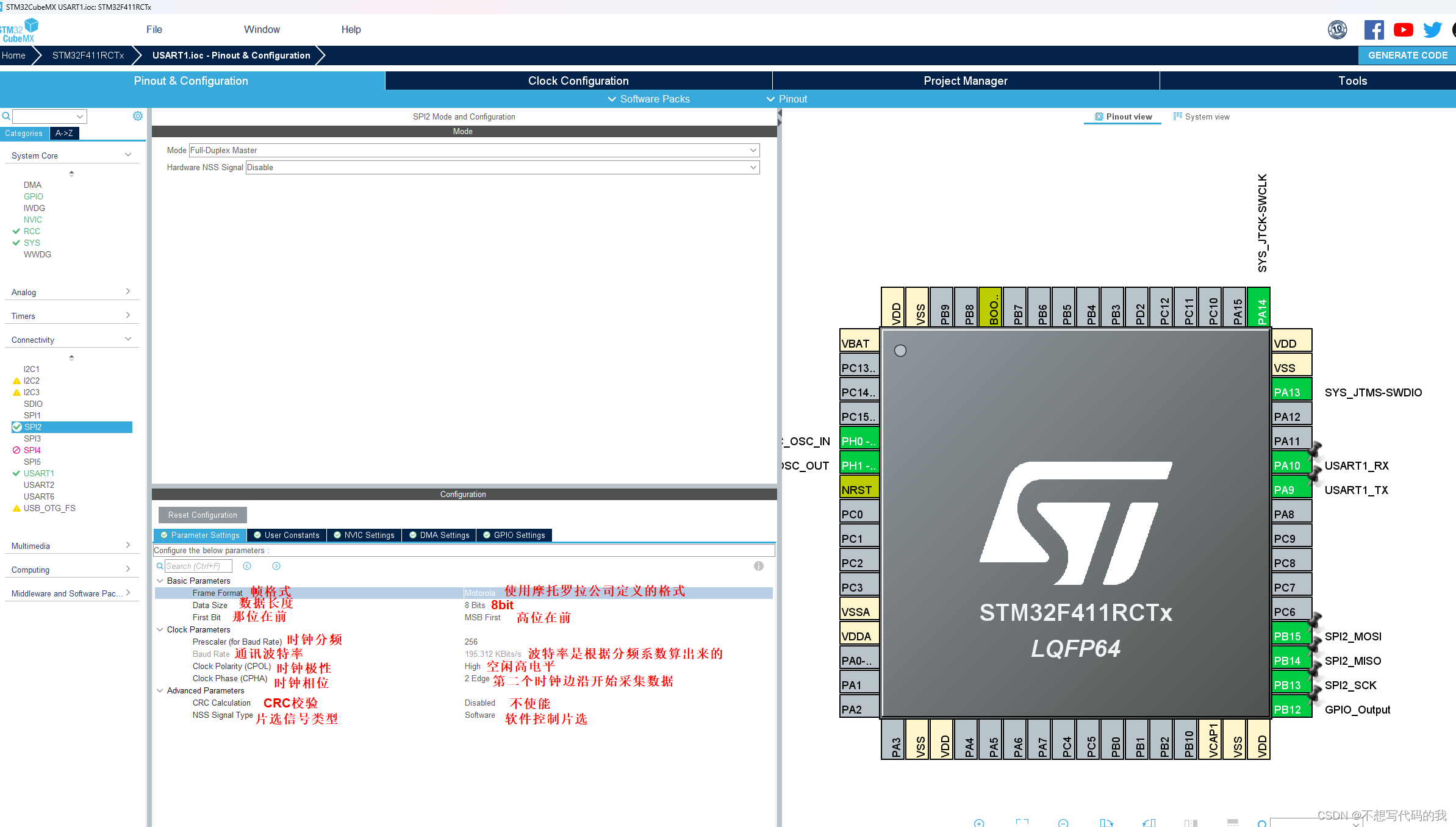
-
GPIO配置:配置的是片选信号,使其默认高电平即可。
-
定时器配置:用于试下微妙延时,以实现W25Q16的底层代码时序要求。
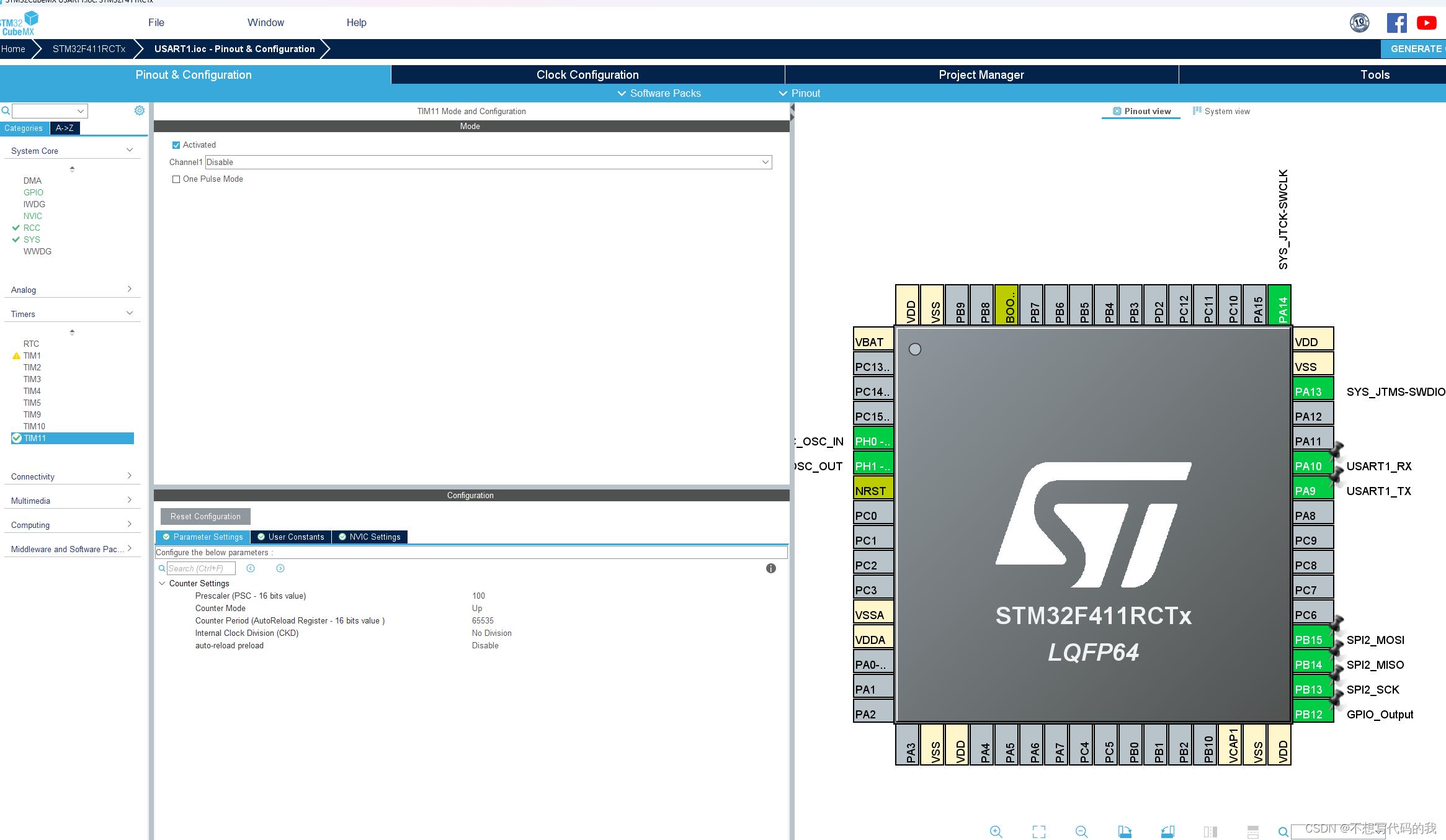
-
其他部分的配置,自行完成,由于不涉及W25Q16的驱动,所以不做展示。
驱动代码
关于驱动代码,这里我是采用的正点原子提供的源码,然后修改以一部分,用作CubeMX配置移植使用,仅作个人学习使用!!!
- norflash.c
#include "norflash.h"
#include "spi.h"
#include "delay.h"
#include "usart.h"
#include "stm32f4xx_hal_gpio.h"
//
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK NANO STM32F4开发板
//W25QXX驱动代码
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//创建日期:2019/4/23
//版本:V1.0
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2019-2029
//All rights reserved
//uint16_t NORFLASH_TYPE = NM25Q16; //默认就是NM25Q16//4Kbytes为一个Sector
//16个扇区为1个Block
//W25X16
//容量为2M字节,共有32个Block,512个Sector//初始化SPI FLASH的IO口
void Norflash_Init(void)
{
// GPIO_InitTypeDef GPIO_Initure;// __HAL_RCC_GPIOB_CLK_ENABLE(); //使能GPIOB时钟// GPIO_Initure.Pin = GPIO_PIN_12; //PB12
// GPIO_Initure.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
// GPIO_Initure.Pull = GPIO_PULLUP; //上拉
// GPIO_Initure.Speed = GPIO_SPEED_HIGH; //高速
// HAL_GPIO_Init(GPIOB, &GPIO_Initure); //初始化NORFLASH_CS = 1; //SPI FLASH不选中
// SPI2_Init(); //初始化SPI
// SPI2_SetSpeed(SPI_BAUDRATEPRESCALER_4); //设置为24M时钟,高速模式NORFLASH_TYPE = Norflash_ReadID(); //读取FLASH ID.
}//读取SPI_FLASH的状态寄存器
//BIT7 6 5 4 3 2 1 0
//SPR RV TB BP2 BP1 BP0 WEL BUSY
//SPR:默认0,状态寄存器保护位,配合WP使用
//TB,BP2,BP1,BP0:FLASH区域写保护设置
//WEL:写使能锁定
//BUSY:忙标记位(1,忙;0,空闲)
//默认:0x00
uint8_t Norflash_ReadSR(void)
{uint8_t byte = 0;NORFLASH_CS = 0; //使能器件SPI2_ReadWriteByte(FLASH_ReadStatusReg); //发送读取状态寄存器命令byte = SPI2_ReadWriteByte(0Xff); //读取一个字节NORFLASH_CS = 1; //取消片选return byte;
}
//写SPI_FLASH状态寄存器
//只有SPR,TB,BP2,BP1,BP0(bit 7,5,4,3,2)可以写!!!
void Norflash_Write_SR(uint8_t sr)
{NORFLASH_CS = 0; //使能器件SPI2_ReadWriteByte(FLASH_WriteStatusReg); //发送写取状态寄存器命令SPI2_ReadWriteByte(sr); //写入一个字节NORFLASH_CS = 1; //取消片选
}
//SPI_FLASH写使能
//将WEL置位
void Norflash_Write_Enable(void)
{NORFLASH_CS = 0; //使能器件SPI2_ReadWriteByte(FLASH_WriteEnable); //发送写使能NORFLASH_CS = 1; //取消片选
}
//SPI_FLASH写禁止
//将WEL清零
void Norflash_Write_Disable(void)
{NORFLASH_CS = 0; //使能器件SPI2_ReadWriteByte(FLASH_WriteDisable); //发送写禁止指令NORFLASH_CS = 1; //取消片选
}
//读取芯片ID W25X16的ID:0XEF14
uint16_t Norflash_ReadID(void)
{uint16_t Temp = 0;NORFLASH_CS = 0;SPI2_ReadWriteByte(0x90);//发送读取ID命令SPI2_ReadWriteByte(0x00);SPI2_ReadWriteByte(0x00);SPI2_ReadWriteByte(0x00);Temp |= SPI2_ReadWriteByte(0xFF) << 8;Temp |= SPI2_ReadWriteByte(0xFF);NORFLASH_CS = 1;return Temp;
}
//读取SPI FLASH
//在指定地址开始读取指定长度的数据
//pBuffer:数据存储区
//ReadAddr:开始读取的地址(24bit)
//NumByteToRead:要读取的字节数(最大65535)
void Norflash_Read(uint8_t *pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead)
{uint16_t i;NORFLASH_CS = 0; //使能器件SPI2_ReadWriteByte(FLASH_ReadData); //发送读取命令SPI2_ReadWriteByte((uint8_t)((ReadAddr) >> 16)); //发送24bit地址SPI2_ReadWriteByte((uint8_t)((ReadAddr) >> 8));SPI2_ReadWriteByte((uint8_t)ReadAddr);for (i = 0; i < NumByteToRead; i++){pBuffer[i] = SPI2_ReadWriteByte(0XFF); //循环读数}NORFLASH_CS = 1; //取消片选
}
//SPI在一页(0~65535)内写入少于256个字节的数据
//在指定地址开始写入最大256字节的数据
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大256),该数不应该超过该页的剩余字节数!!!
void Norflash_Write_Page(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{uint16_t i;Norflash_Write_Enable(); //SET WELNORFLASH_CS = 0; //使能器件SPI2_ReadWriteByte(FLASH_PageProgram); //发送写页命令SPI2_ReadWriteByte((uint8_t)((WriteAddr) >> 16)); //发送24bit地址SPI2_ReadWriteByte((uint8_t)((WriteAddr) >> 8));SPI2_ReadWriteByte((uint8_t)WriteAddr);for (i = 0; i < NumByteToWrite; i++)SPI2_ReadWriteByte(pBuffer[i]); //循环写数NORFLASH_CS = 1; //取消片选Norflash_Wait_Busy(); //等待写入结束
}
//无检验写SPI FLASH
//必须确保所写的地址范围内的数据全部为0XFF,否则在非0XFF处写入的数据将失败!
//具有自动换页功能
//在指定地址开始写入指定长度的数据,但是要确保地址不越界!
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大65535)
//CHECK OK
void Norflash_Write_NoCheck(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{uint16_t pageremain;pageremain = 256 - WriteAddr % 256; //单页剩余的字节数if (NumByteToWrite <= pageremain)pageremain = NumByteToWrite; //不大于256个字节while (1){Norflash_Write_Page(pBuffer, WriteAddr, pageremain);if (NumByteToWrite == pageremain)break; //写入结束了else //NumByteToWrite>pageremain{pBuffer += pageremain;WriteAddr += pageremain;NumByteToWrite -= pageremain; //减去已经写入了的字节数if (NumByteToWrite > 256)pageremain = 256; //一次可以写入256个字节else pageremain = NumByteToWrite; //不够256个字节了}};
}
//写SPI FLASH
//在指定地址开始写入指定长度的数据
//该函数带擦除操作!
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大65535)
uint8_t W25QXX_BUFFER[4096];
void Norflash_Write(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{uint32_t secpos;uint16_t secoff;uint16_t secremain;uint16_t i;secpos = WriteAddr / 4096; //扇区地址 0~511 for w25x16secoff = WriteAddr % 4096; //在扇区内的偏移secremain = 4096 - secoff; //扇区剩余空间大小if (NumByteToWrite <= secremain)secremain = NumByteToWrite; //不大于4096个字节while (1){Norflash_Read(W25QXX_BUFFER, secpos * 4096, 4096); //读出整个扇区的内容for (i = 0; i < secremain; i++) //校验数据{if (W25QXX_BUFFER[secoff + i] != 0XFF)break; //需要擦除}if (i < secremain) //需要擦除{Norflash_Erase_Sector(secpos);//擦除这个扇区for (i = 0; i < secremain; i++) //复制{W25QXX_BUFFER[i + secoff] = pBuffer[i];}Norflash_Write_NoCheck(W25QXX_BUFFER, secpos * 4096, 4096); //写入整个扇区}else Norflash_Write_NoCheck(pBuffer, WriteAddr, secremain); //写已经擦除了的,直接写入扇区剩余区间.if (NumByteToWrite == secremain)break; //写入结束了else//写入未结束{secpos++;//扇区地址增1secoff = 0; //偏移位置为0pBuffer += secremain; //指针偏移WriteAddr += secremain; //写地址偏移NumByteToWrite -= secremain; //字节数递减if (NumByteToWrite > 4096)secremain = 4096; //下一个扇区还是写不完else secremain = NumByteToWrite; //下一个扇区可以写完了}}
}
//擦除整个芯片
//整片擦除时间:
//W25X16:25s
//W25X32:40s
//W25X64:40s
//等待时间超长...
void Norflash_Erase_Chip(void)
{Norflash_Write_Enable(); //SET WELNorflash_Wait_Busy();NORFLASH_CS = 0; //使能器件SPI2_ReadWriteByte(FLASH_ChipErase); //发送片擦除命令NORFLASH_CS = 1; //取消片选Norflash_Wait_Busy(); //等待芯片擦除结束
}
//擦除一个扇区
//Dst_Addr:扇区地址 0~511 for w25x16
//擦除一个山区的最少时间:150ms
void Norflash_Erase_Sector(uint32_t Dst_Addr)
{Dst_Addr *= 4096;Norflash_Write_Enable(); //SET WELNorflash_Wait_Busy();NORFLASH_CS = 0; //使能器件SPI2_ReadWriteByte(FLASH_SectorErase); //发送扇区擦除指令SPI2_ReadWriteByte((uint8_t)((Dst_Addr) >> 16)); //发送24bit地址SPI2_ReadWriteByte((uint8_t)((Dst_Addr) >> 8));SPI2_ReadWriteByte((uint8_t)Dst_Addr);NORFLASH_CS = 1; //取消片选Norflash_Wait_Busy(); //等待擦除完成
}
//等待空闲
void Norflash_Wait_Busy(void)
{while ((Norflash_ReadSR() & 0x01) == 0x01); // 等待BUSY位清空
}
//进入掉电模式
void Norflash_PowerDown(void)
{NORFLASH_CS = 0; //使能器件SPI2_ReadWriteByte(FLASH_PowerDown); //发送掉电命令NORFLASH_CS = 1; //取消片选delay_us(3); //等待TPD
}
//唤醒
void Norflash_WAKEUP(void)
{NORFLASH_CS = 0; //使能器件SPI2_ReadWriteByte(FLASH_ReleasePowerDown); // send W25X_PowerDown command 0xABNORFLASH_CS = 1; //取消片选delay_us(3); //等待TRES1
}- norflash.h
#ifndef __NORFLASH_H
#define __NORFLASH_H
#include "main.h"
//
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK NANO STM32F4开发板
//W25QXX驱动代码
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//创建日期:2019/4/23
//版本:V1.0
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2019-2029
//All rights reserved
////W25X系列/Q系列芯片列表
#define W25Q80 0XEF13 /* W25Q80 芯片ID */
#define W25Q16 0XEF14 /* W25Q16 芯片ID */
#define W25Q32 0XEF15 /* W25Q32 芯片ID */
#define W25Q64 0XEF16 /* W25Q64 芯片ID */
#define W25Q128 0XEF17 /* W25Q128 芯片ID */
#define NM25Q16 0X6814 /* NM25Q16 芯片ID */
#define NM25Q64 0X5216 /* NM25Q64 芯片ID */
#define NM25Q128 0X5217 /* NM25Q128 芯片ID */
#define BY25Q64 0X6816 /* BY25Q64 芯片ID */
#define BY25Q128 0X6817 /* BY25Q128 芯片ID */extern uint16_t NORFLASH_TYPE;//定义我们使用的flash芯片型号#define NORFLASH_CS PBout(12) //W25QXX的片选信号 extern uint8_t W25QXX_BUFFER[4096];//指令表
#define FLASH_WriteEnable 0x06
#define FLASH_WriteDisable 0x04
#define FLASH_ReadStatusReg 0x05
#define FLASH_WriteStatusReg 0x01
#define FLASH_ReadData 0x03
#define FLASH_FastReadData 0x0B
#define FLASH_FastReadDual 0x3B
#define FLASH_PageProgram 0x02
#define FLASH_BlockErase 0xD8
#define FLASH_SectorErase 0x20
#define FLASH_ChipErase 0xC7
#define FLASH_PowerDown 0xB9
#define FLASH_ReleasePowerDown 0xAB
#define FLASH_DeviceID 0xAB
#define FLASH_ManufactDeviceID 0x90
#define FLASH_JedecDeviceID 0x9Fvoid Norflash_Init(void);
uint16_t Norflash_ReadID(void); //读取FLASH ID
uint8_t Norflash_ReadSR(void); //读取状态寄存器
void Norflash_Write_SR(uint8_t sr); //写状态寄存器
void Norflash_Write_Enable(void); //写使能
void Norflash_Write_Disable(void); //写保护
void Norflash_Read(uint8_t *pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead); //读取flash
void Norflash_Write(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite); //写入flash
void Norflash_Erase_Chip(void); //整片擦除
void Norflash_Erase_Sector(uint32_t Dst_Addr);//扇区擦除
void Norflash_Wait_Busy(void); //等待空闲
void Norflash_PowerDown(void); //进入掉电模式
void Norflash_WAKEUP(void); //唤醒#endif- spi.c:在spi.c中添加以下内容。同时注意在spi.h中声明该函数
/SPI2 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI2_ReadWriteByte(u8 TxData)
{u8 Rxdata;HAL_SPI_TransmitReceive(&hspi2,&TxData,&Rxdata,1, 1000); return Rxdata; //返回收到的数据
}
- delay.c
// Core\Src\delay.c
#include "tim.h"
#include "delay.h"
/*** @brief 微秒延时* @param Delay_us —— 指定延迟时间长度,单位为微秒。* @retval None*/
void delay_us(uint32_t Delay_us)
{__HAL_TIM_SetCounter(&htim11, 0);__HAL_TIM_ENABLE(&htim11);while(__HAL_TIM_GetCounter(&htim11) < Delay_us);/* Disable the Peripheral */__HAL_TIM_DISABLE(&htim11);
}- delay.h
// Core\Inc\delay.h
#ifndef __DELAY_H__
#define __DELAY_H__#include "main.h"
#include "tim.h"void delay_us(uint32_t Delay_us);#endif /* __DELAY_H__ */- main.h:添加以下代码
//定义一些常用的数据类型短关键字
typedef int32_t s32;
typedef int16_t s16;
typedef int8_t s8;typedef const int32_t sc32;
typedef const int16_t sc16;
typedef const int8_t sc8; typedef __IO int32_t vs32;
typedef __IO int16_t vs16;
typedef __IO int8_t vs8;typedef __I int32_t vsc32;
typedef __I int16_t vsc16;
typedef __I int8_t vsc8; typedef uint32_t u32;
typedef uint16_t u16;
typedef uint8_t u8;typedef const uint32_t uc32;
typedef const uint16_t uc16;
typedef const uint8_t uc8; typedef __IO uint32_t vu32;
typedef __IO uint16_t vu16;
typedef __IO uint8_t vu8;typedef __I uint32_t vuc32;
typedef __I uint16_t vuc16;
typedef __I uint8_t vuc8; //位带操作,实现51类似的GPIO控制功能
//具体实现思想,参考<<CM3权威指南>>第五章(87页~92页).
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14 #define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10 //IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入 #define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入 #define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入 #define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
- main.c
//要写入到W25Q16的字符串数组
const uint8_t TEXT_Buffer[] = {"Hello,The man who don't write code!"};
#define SIZE sizeof(TEXT_Buffer)
#define FLASH_SIZE 2 * 1024 * 1024 //FLASH 大小为2M字节;int main(void)
{/* USER CODE BEGIN 1 */
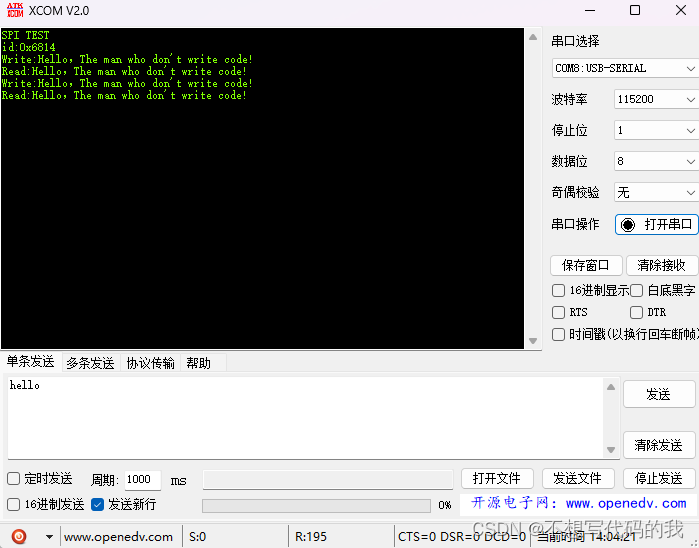
// uint8_t len;uint8_t datatemp[100]; //flash读取到的内容/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();MX_SPI2_Init();MX_TIM11_Init();/* USER CODE BEGIN 2 */HAL_UART_Receive_IT(&huart1, (unsigned char* )aRxBuffer, 1); //串口接收中断,用作调试Norflash_Init(); //W25QXX初始化printf("SPI TEST\r\n");NORFLASH_TYPE = Norflash_ReadID();//读取FLASH IDprintf("id:%#x\r\n",NORFLASH_TYPE); /* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){
// if(USART_RX_STA&0x8000)
// {
// len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度
// printf("\r\n您发送的消息为:\r\n");
// HAL_UART_Transmit(&huart1,(uint8_t*)USART_RX_BUF,len,1000); //发送接收到的数据
// while(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_TC)!=SET); //等待发送结束
// printf("\r\n\r\n");//插入换行
// USART_RX_STA=0;
// }Norflash_Write((uint8_t *)TEXT_Buffer, FLASH_SIZE - 100, sizeof(TEXT_Buffer)); //从倒数第100个地址处开始,写入SIZE长度的数据HAL_Delay(1000);printf("Write:%s\r\n", TEXT_Buffer); //显示读到的字符串Norflash_Read(datatemp, FLASH_SIZE - 100, sizeof(TEXT_Buffer)); //从倒数第100个地址处开始,读出SIZE个字节HAL_Delay(1000);printf("Read:%s\r\n", datatemp); //显示读到的字符串/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}以上就是所有W25Q16的驱动代码,仅供个人学习哈,如果有哪里有误,还请斧正。
运行结果
相关文章:
STM32+CubeMX移植SPI协议驱动W25Q16FLash存储器
STM32CubeMX移植SPI协议驱动W25Q16FLash存储器 SPI简介拓扑结构时钟相位(CPHA)和时钟极性( CPOL) W25Q16简介什么是Flash,有什么特点?W25Q16内部块、扇区、页的划分引脚定义通讯方式控制指令原理图 CubeMX配…...

gpt-4o考场安排
说明 :经过多次交互,前后花了几个小时,总算完成了基本功能。如果做到按不同层次分配考场,一键出打印结果就完美了。如果不想看中间“艰苦”的过程,请直接跳到“最后结果”及“食用方法”。中间过程还省略了一部分交互&…...
【Unity AR开发插件】四、制作热更数据-AR图片识别场景
专栏 本专栏将介绍如何使用这个支持热更的AR开发插件,快速地开发AR应用。 链接: Unity开发AR系列 插件简介 通过热更技术实现动态地加载AR场景,简化了AR开发流程,让用户可更多地关注Unity场景内容的制作。 “EnvInstaller…”支…...

Spring AOP的实操 + 原理(动态代理)
1 什么是Spring AOP 要想知道Spring AOP那必然是是要先知道什么是AOP了: AOP,全称为 Aspect-Oriented Programming(面向切面编程),是一种编程范式,用于提高代码的模块化,特别是横切关注点(cros…...
16.线性回归代码实现
线性回归的实操与理解 介绍 线性回归是一种广泛应用的统计方法,用于建模一个或多个自变量(特征)与因变量(目标)之间的线性关系。在机器学习和数据科学中,线性回归是许多入门者的第一个模型,它…...
Java进阶学习笔记1——课程介绍
课程适合学习的人员: 1)具备一定java基础的人员; 2)想深刻体会Java编程思想,成为大牛的人员; 学完有什么收获? 1)掌握完整的Java基础技术体系; 2)极强的编…...
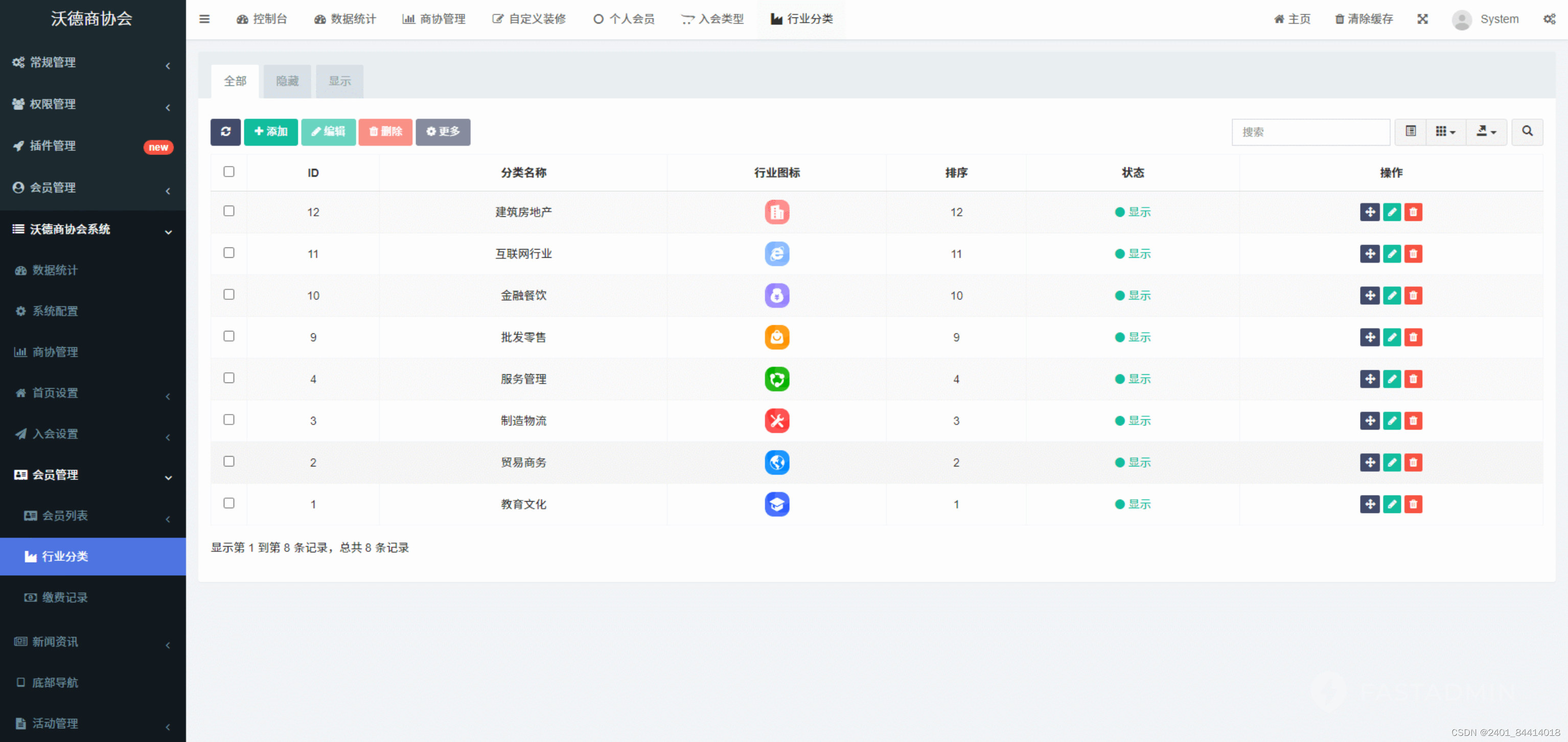
【全开源】沃德商协会管理系统源码(FastAdmin+ThinkPHP+Uniapp)
一款基于FastAdminThinkPHPUniapp开发的商协会系统,新一代数字化商协会运营管理系统,以“智慧化会员体系、智敏化内容运营、智能化活动构建”三大板块为基点,实施功能全场景覆盖,一站式解决商协会需求壁垒,有效快速建立…...
)
python毕设项目选题汇总(全)
各位计算机方面的毕业生们,是不是在头疼毕业论文写什么呢,我这给大家提供点思路: 网站系统类 《基于python的招聘数据爬虫设计与实现》 《基于python和Flask的图书管理系统》 《基于照片分享的旅游景点推荐系统》 《基于djangoxadmin的学生信…...

c#从数据库读取数据到datagridview
从已有的数据库读取数据显示到winform的datagridview控件,具体代码如下: //判断有无表 if (sqliteConn.State ConnectionState.Closed) sqliteConn.Open(); SQLiteCommand mDbCmd sqliteConn.CreateCommand(); m…...
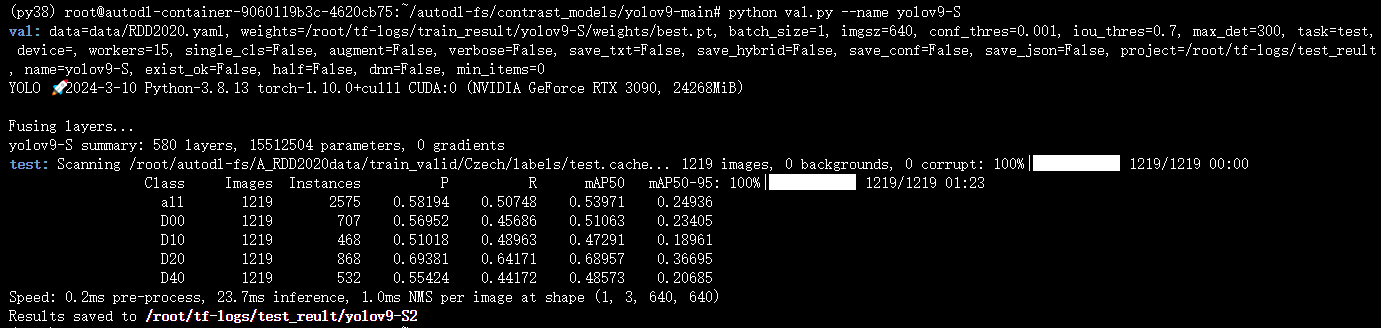
训练YOLOv9-S(注意:官方还没有提供YOLOv9-S的网络,我这是根据网络博客进行的步骤,按照0.33、0.50比例调整网络大小,参数量15.60M,计算量67.7GFLOPs)
文章目录 1、自己动手制造一个YOLOv9-S网络结构1.1 改前改后的网络结构(参数量、计算量)对比1.2 一些发现,YOLOv9代码打印的参数量计算量和Github上提供的并不一致,甚至yolov9-c.yaml代码打印出来是Github的两倍1.3 开始创造YOLOv…...

视觉检测实战项目——九点标定
本文介绍九点标定方法 已知 9 个点的图像坐标和对应的机械坐标,直接计算转换矩阵,核心原理即最小二乘拟合 {𝑥′=𝑎𝑥+𝑏𝑦+𝑐𝑦′=𝑎′𝑥+𝑏′𝑦+𝑐′ [𝑥1𝑦11𝑥2𝑦21⋮⋮⋮𝑥9𝑦91][𝑎𝑎′𝑏𝑏′𝑐𝑐′]=[𝑥1′𝑦…...

android git提交代码命令以及常见命令的使用
安装Git Ubuntu: sudo apt-get install git-core创建代码仓库: 配置身份: git config --global user.name "Tony" git confit --global user.email "tonygmail.com"查看身份: git config --global user.…...

类图的六大关系
类图中的六大关系包括:继承关系、实现关系、关联关系、聚合关系、组合关系和依赖关系。 1. 继承关系 继承是一种类与类之间的关系,表示一种泛化和特化的关系。子类继承父类的特性和行为。 class Animal {void eat() {System.out.println("This an…...
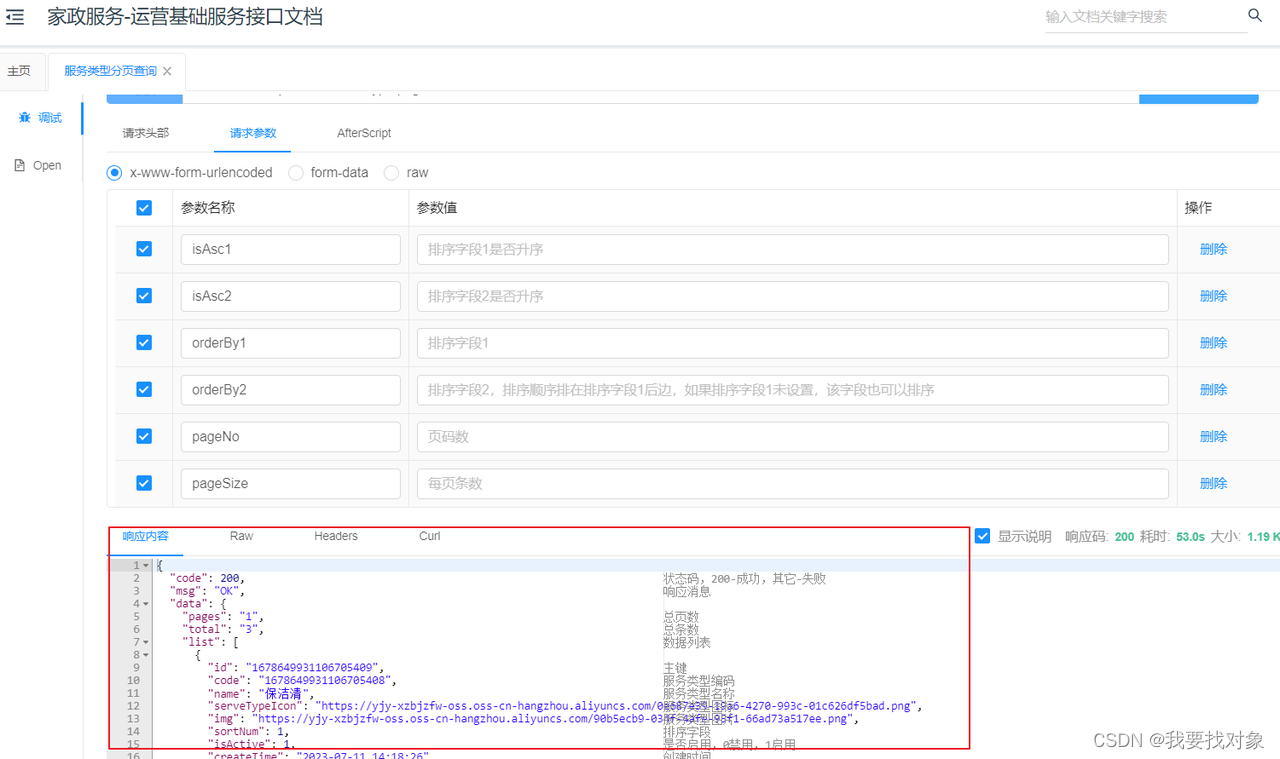
家政项目day2 需求分析(模拟入职后熟悉业务流程)
目录 1 项目主体介绍1.1 项目背景1.2 运营模式1.3 项目业务流程 2 运营端需求2.1 服务类型管理2.2 服务项目(服务)管理2.3 区域管理2.4 区域服务管理2.5 相关数据库表的管理2.6 设计工程结构2.7 测试接口(接口断点查看业务代码) 3…...

面试总结之:socket线路切换
"socket线路切换"通常指的是在网络通信过程中,根据当前网络状态或策略来动态更换数据传输路径的技术。这种技术可以提高通信的可靠性和性能。 在实际应用中,线路切换可能涉及到多种技术,例如: 负载均衡:根据每条路径的当前负载情况,动态地选择一条较为空闲的路…...

002 递归评论 mongodb websocket消息推送
文章目录 商品评论CommentController.javaComment.javaCommentServiceImpl.javaCommentRepository.javaCommentService.javaWebSocketConfig.javaWebSocketProcess.javaapplication.yamlproductReview.htmlindex.htmlindex.jsindex.css 订单评论EvaluateMapper.xmlEvaluateMapp…...

高开高走的续作,可不止《庆余年2》
说起最近霸屏的影视剧,莫过于《庆余年2》。火爆全网的讨论度总归是没有辜负观众们五年的等待,在五月的影视市场独占鳌头已成定局。张若昀、陈道明、李沁等一众演员稳定发挥,剧情节奏随着故事发展渐入佳境,评分一路高涨。 对影视作…...

uniapp android使用uni.chooseLocation,app云打包后,定位地址列表一直在加载中
复现BUG 1、自己生成一个证书 参考生成证书流程 2、使用刚生成证书的SHA1 ,重新创建一个高德key 高德开放平台地址 3、打包(打包的包名要与高德申请key所填的包名一致)...
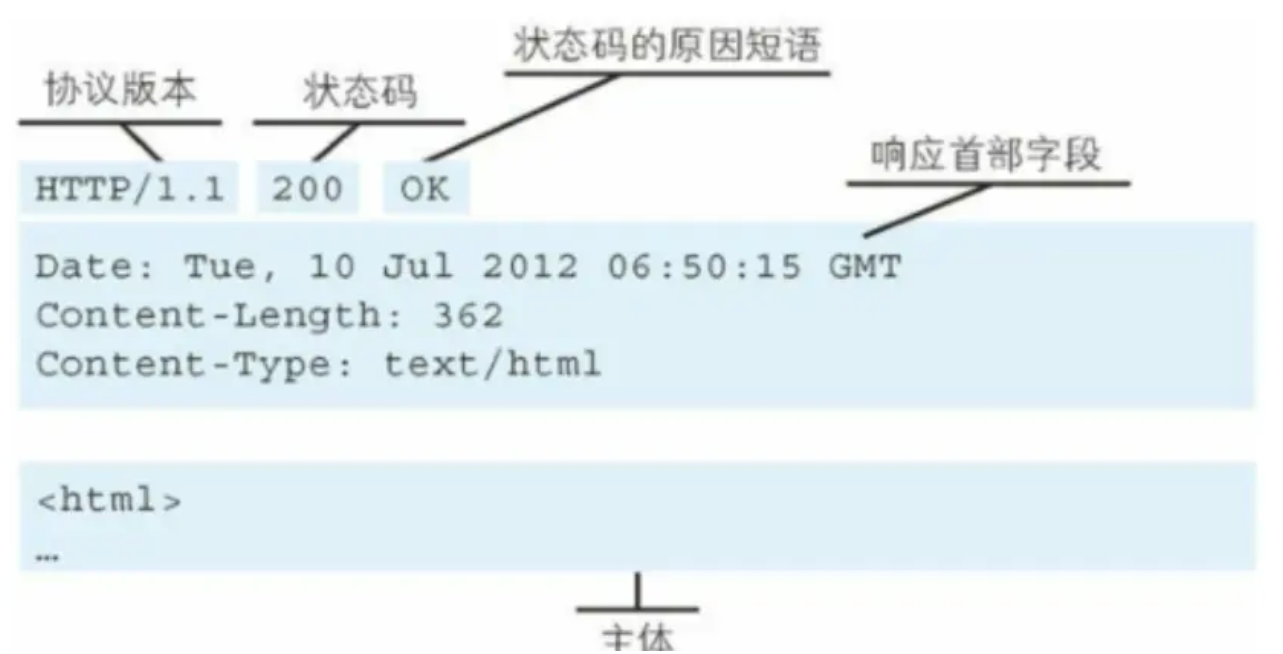
详解http协议
什么是HTTP协议 定义 Http协议即超文本传送协议 (HTTP-Hypertext transfer protocol) 。 它定义了浏览器(即万维网客户进程)怎样向万维网服务器请求万维网文档,以及服务器怎样把文档传送给浏览器。从层次的角度看,HTTP是面向&am…...

台湾省军事演习路径规划:A*算法在复杂地形中的应用
❤️❤️❤️ 欢迎来到我的博客。希望您能在这里找到既有价值又有趣的内容,和我一起探索、学习和成长。欢迎评论区畅所欲言、享受知识的乐趣! 推荐:数据分析螺丝钉的首页 格物致知 终身学习 期待您的关注 导航: LeetCode解锁100…...

PostgreSQL CASE语句深度解析:性能、类型与NULL安全实战指南
1. 为什么你必须真正吃透 PostgreSQL 的 CASE 语句——它远不止是 SQL 里的“if-else”翻译器在 PostgreSQL 实战中,我见过太多人把CASE当成一个语法糖:写几个WHEN...THEN,加个ELSE,再套个END,就以为搞定了。结果呢&am…...

Python基础语法:访问器@property和修改器@xxx.setter
一、简介 访问器和修改器也是装饰器的一种。 property: 访问器,getter xxx.setter: 修改器,setter 访问器和修改器的根本目的是想将属性私有化,提供getter&setter去访问。 访问器和修改器能够做到访问属性其实在调用getter方法࿰…...

Stitches API完全指南:从基础配置到自定义扩展
Stitches API完全指南:从基础配置到自定义扩展 【免费下载链接】stitches HTML5 Sprite Sheet Generator 项目地址: https://gitcode.com/gh_mirrors/sti/stitches Stitches是一款强大的HTML5 Sprite Sheet Generator,它提供了直观的API接口&…...

GEMM内核与MHA中的寄存器分配优化策略
1. GEMM内核与寄存器分配基础解析通用矩阵乘法(GEMM)作为深度学习计算的核心算子,其性能表现直接决定了神经网络训练和推理的效率。在硬件层面,寄存器分配的优劣往往能带来数倍的性能差异。我们以典型的GEMM运算C αAB βC为例&…...

Hirschmann RS20-0800M4M4SDAE工业以太网交换机
Hirschmann RS20-0800M4M4SDAE 工业以太网交换机产品特点:端口配置:共8个端口,含6个RJ45电口和2个ST光纤接口。端口速率:所有端口均为100Mbps快速以太网。光纤类型:2个光纤端口为多模、ST接头。管理类型:二…...

金融合规审核为何人力堆积却仍漏洞百出?2026年RegTech演进与Agent全链路闭环解决方案
在2026年的金融监管环境下,合规审核已不再是简单的“查漏补缺”,而是演变为一场高强度的算力与逻辑博弈。尽管金融机构在合规成本上的投入逐年攀升,甚至不惜以“人海战术”填补流程断点,但监管罚单的数额与频率却并未显著下降。这…...

Sangfor文件夹可以删除吗?【图文讲解】深信服文件夹残留清理?如何彻底删除深信服?Sangfor文件夹是什么?
(1)问题背景打开C盘,突然冒出个Sangfor 文件夹,占用好几个 GB 空间,想删又不敢删,怕删坏系统、断网崩溃;上网一查,说法五花八门,有人说是病毒,有人说是办公软…...

Hindsight测试策略:单元测试、集成测试和端到端测试
Hindsight测试策略:单元测试、集成测试和端到端测试 【免费下载链接】hindsight Hindsight: Agent Memory That Learns 项目地址: https://gitcode.com/GitHub_Trending/hindsight2/hindsight Hindsight作为一款专注于Agent Memory的开源项目,其可…...

武汉国电华美串联谐振试验装置,现场用着心里有底
在高压试验现场干了这么多年,这位老师傅常说,一台好的串联谐振装置,就是试验人员的胆。面对GIS、大型变压器、超高压电缆这些大电容试品,没有趁手的谐振设备,交流耐压试验根本没法干。16875kVA/225kV这个规格ÿ…...

CSharpVerbalExpressions常见问题解答:解决开发者遇到的10个典型挑战
CSharpVerbalExpressions常见问题解答:解决开发者遇到的10个典型挑战 【免费下载链接】CSharpVerbalExpressions 项目地址: https://gitcode.com/gh_mirrors/cs/CSharpVerbalExpressions CSharpVerbalExpressions是一个强大的C#库,它通过类自然语…...