STM32—HAL-PWM-舵机180(每个频率对应每个角度)
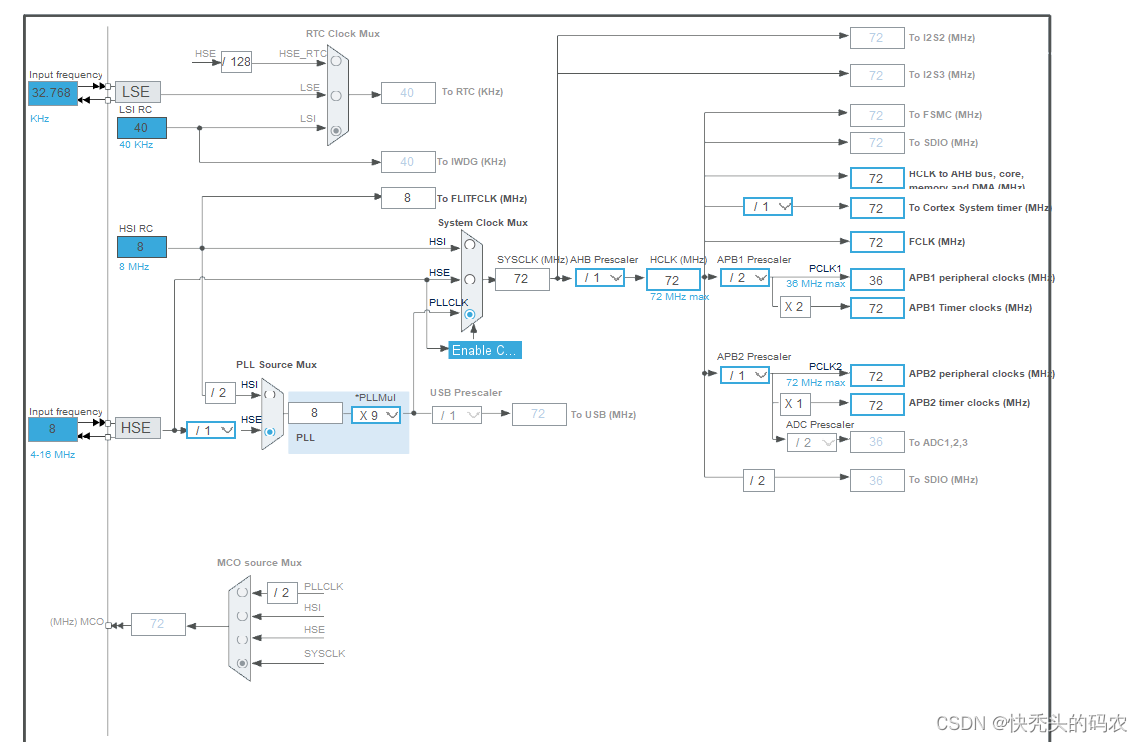
1开启时钟
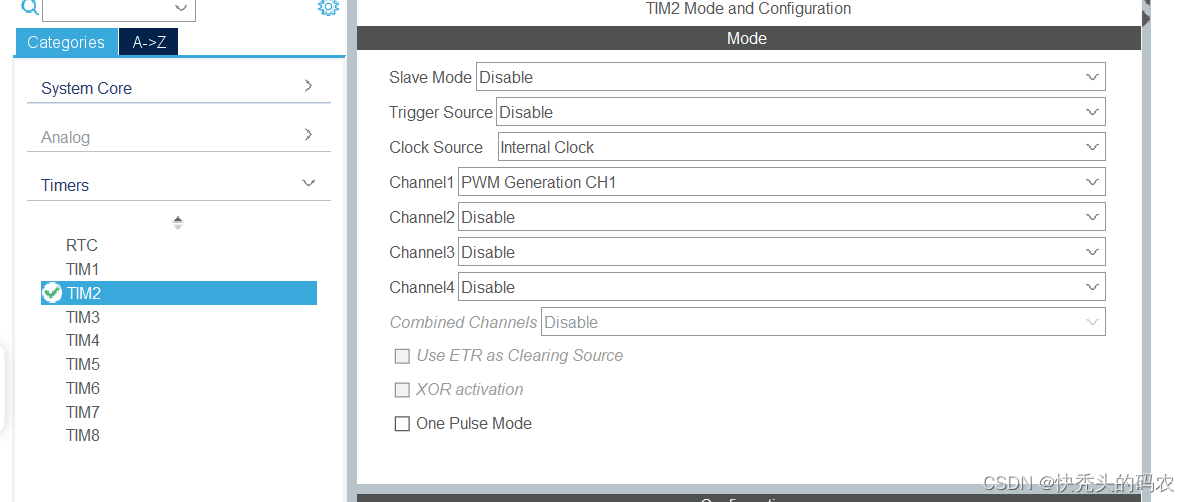
2开启定时器和通道设置为PWM模式
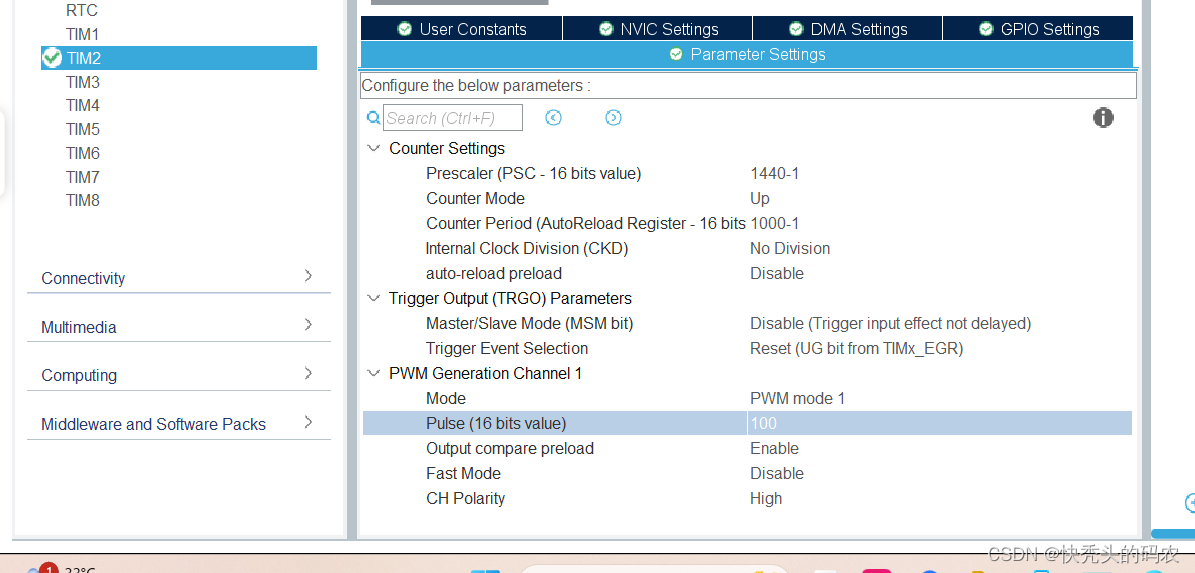
3将定时时间设置为50Hz(20ms)//每25为1ms
4代码编写
4.1开启PWM
4.2改PWM的占空比
4.3效果0~180度在0度
源码
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2024 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes *//* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();/* USER CODE BEGIN 2 */HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1);int b=0;/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){b=b+10;__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1,b);if(b>=200){b=0;}HAL_Delay(500);//HAL_Delay(1000);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
相关文章:
STM32—HAL-PWM-舵机180(每个频率对应每个角度)
1开启时钟 2开启定时器和通道设置为PWM模式 3将定时时间设置为50Hz(20ms)//每25为1ms 4代码编写 4.1开启PWM 4.2改PWM的占空比 4.3效果0~180度在0度 源码 /* USER CODE BEGIN Header */ /******************************************************************************…...
MyBatis详细教程!!(入门版)
目录 什么是MyBatis? MyBatis入门 1)创建工程 2)数据准备 3)配置数据库连接字符串 4)写持久层代码 5)生成测试类 MyBatis打印日志 传递参数 MyBatis的增、删、改 增(Insert࿰…...

c++ using 关键字
在C中,using 关键字有多种用途,但最常见的用途之一是在命名空间(namespace)中引入名称,以避免在代码中频繁使用命名空间前缀。此外,using 还可以用于类型别名(typedef 的替代品)和模…...

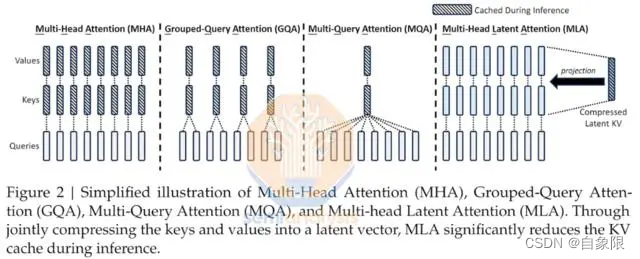
AIGC时代算法工程师的面试秘籍(2024.4.29-5.12第十三式) |【三年面试五年模拟】
写在前面 【三年面试五年模拟】旨在整理&挖掘AI算法工程师在实习/校招/社招时所需的干货知识点与面试方法,力求让读者在获得心仪offer的同时,增强技术基本面。也欢迎大家提出宝贵的优化建议,一起交流学习💪 欢迎大家关注Rocky…...
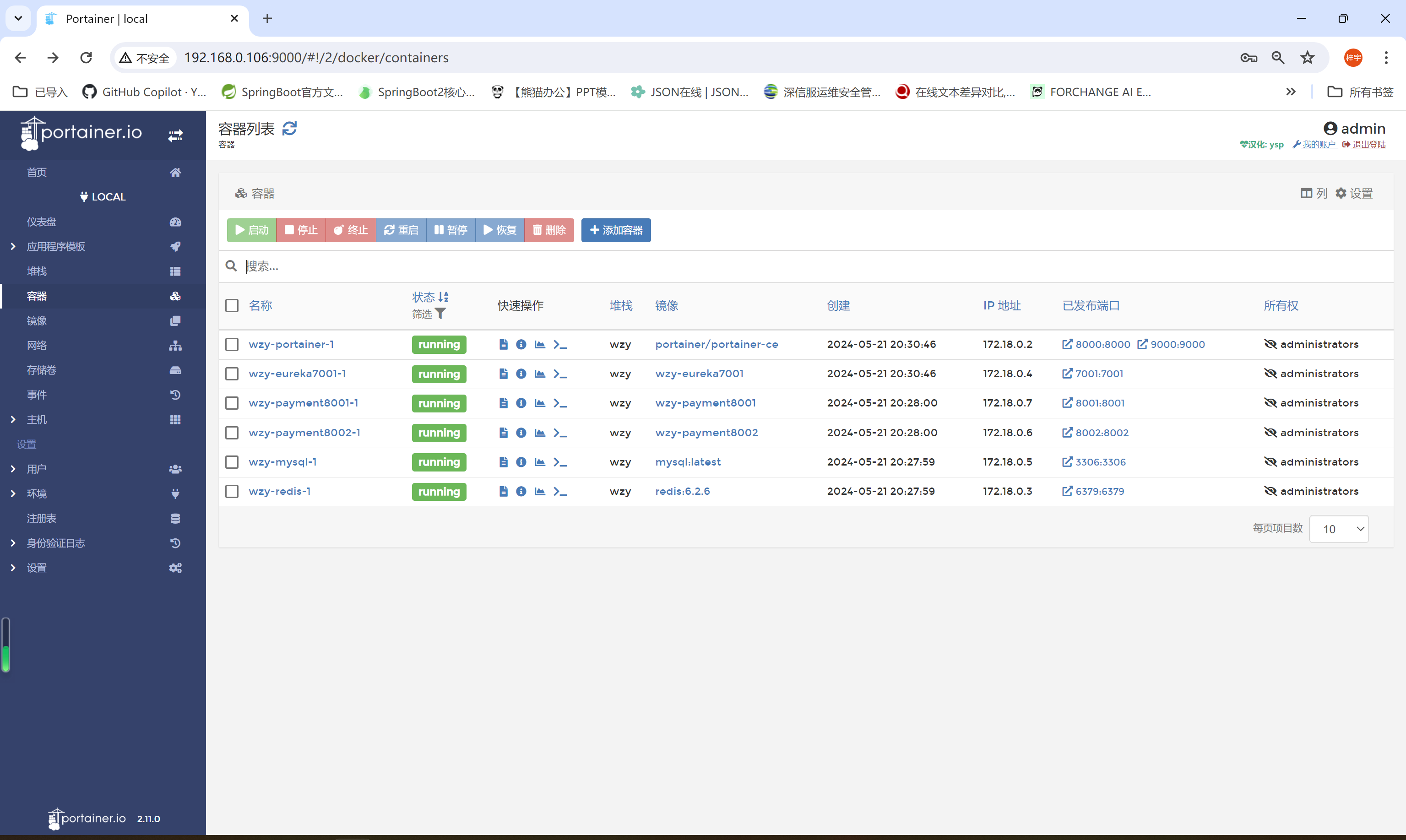
Docker Portainer使用
Portainer是什么 Docker Portainer是一个轻量级的 Web UI 管理界面,可以用来管理Docker环境。它提供了一个直观的控制台,用户可以通过它来管理Docker主机、容器、网络、卷等Docker资源。 Portainer的主要功能和特点包括: 容器管理:可以查看、启动、停止、删除容器,以及查看容器…...

创新系列-既要保留<a/>标签右键功能, 又不要href导致点击页面刷新, 希望click实现vue-router跳转
发布时间:2024/05/22 如果您有适合我的项目机会给到我,这是我的简历:Resume 思路: 思路原理:实践发现href为null或者" "的时候是不起作用的 将href属性绑定的固定路径设置为响应式数据变量a,a初…...

【OceanBase诊断调优】—— KVCache 排查手册
原文链接:OceanBase分布式数据库-海量数据 笔笔算数 本文介绍 KVcache 相关问题的排查方法。 KVCache 相关概念 在进行排查前,需要了解几个概念。 pin 一个 cache 块 ( memblock ) 被 pin 住,表示它正在被引用。 cache 的由多个定长的块组成…...
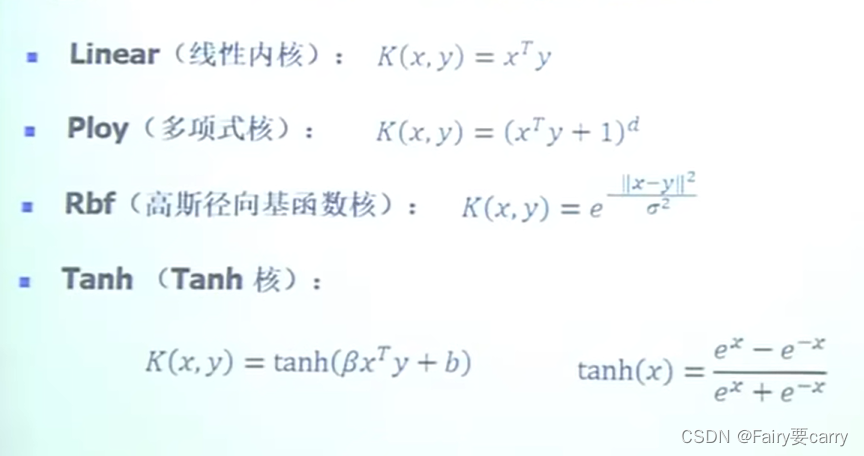
核函数的介绍
1.核函数的介绍: 1、用线性核等于没有用核。 2、多项式核:随着d越大,则 fai(X) 对应的维度将越高。(可以通过d得到对应的fai(X)函数)。 3、高斯核函数:无限维度。 4、tanh核。 2.如何选择核函数的参数&am…...

使用pytorch写一个简单的vae网络用于生成minist手写数字图像
文章目录 代码结果代码 import torch import torch.nn as nn import torch.optim as optim import torch.nn.functional as F from torch.utils.data import DataLoader from torchvision impo...
的阻塞立即返回)
Windows平台让标准输入(stdin)的阻塞立即返回
文章目录 背景介绍代码示例版本1-基本命令处理版本2-多线程命令处理,不阻塞主函数版本3-即使没有用户输入,也能立即退出 背景介绍 在开发命令行工具或控制台应用程序时,经常需要处理用户输入。常规做法是使用标准输入(stdin&…...
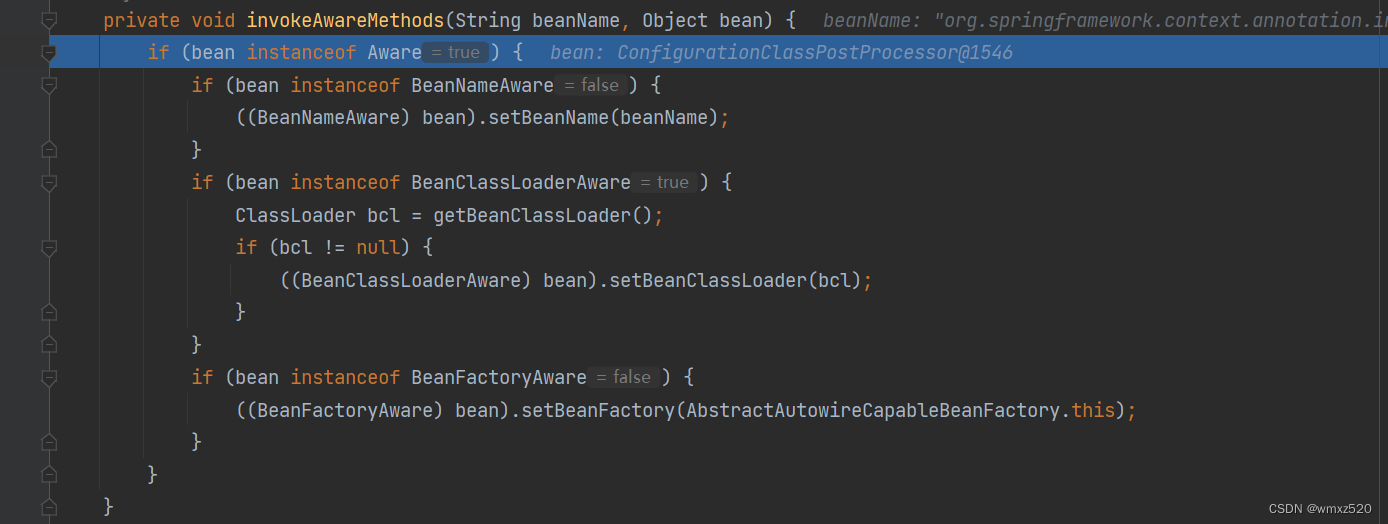
Spring中的Aware接口
Spring中的Aware接口 Aware接口介绍 Aware是Spring中的接口,它的作用是可以让Bean获取到运行环境的相关信息。比如获取到上下文、Bean在容器中的名称等。 Spring中提供了很多Aware接口的子类,具体如下: 常用接口的作用如下: …...

FFmpeg滤镜完整列表
FFmpeg滤镜完整列表 滤镜名称 用途 acompressor 压缩音频信号,当输入信号超过某个预设阈值时,压缩器就会开始工作。该滤镜使音量大的部分变得不那么响亮,而音量小的部分相对变得响亮,这样就可以使整体听起来更加均衡,常用于音乐…...

深入探索Python基础:两个至关重要的函数
新书上架~👇全国包邮奥~ python实用小工具开发教程http://pythontoolsteach.com/3 欢迎关注我👆,收藏下次不迷路┗|`O′|┛ 嗷~~ 目录 一、初学者的基石:print与input函数 二、类型转换:从字符串到浮点数…...
探索集合python(Set)的神秘面纱:它与字典有何不同?
新书上架~👇全国包邮奥~ python实用小工具开发教程http://pythontoolsteach.com/3 欢迎关注我👆,收藏下次不迷路┗|`O′|┛ 嗷~~ 目录 一、集合(Set)与字典(Dictionary)的初识 1. …...
火山引擎“奇袭”阿里云
图片|电影《美国队长3》剧照 ©自象限原创 作者丨程心 编辑丨罗辑 大模型价格战,已经不是什么新闻。 从OpenAI发布GPT-4o,将API价格下调50%,并宣布面向普通用户免费开始,就标志着大模型的竞争从性能进入到了成本…...
牛客网刷题 | BC94 反向输出一个四位数
目前主要分为三个专栏,后续还会添加: 专栏如下: C语言刷题解析 C语言系列文章 我的成长经历 感谢阅读! 初来乍到,如有错误请指出,感谢! 描述 将一个四位数&…...

记一次MySQL执行修改语句超时问题
异常问题 原因分析 这个问题发生在开发环境,怀疑是提交事务时终止项目运行,没有提交该事务,造成死锁 调试该事务时时间太长,为什么说有这个原因呢,因为通过查找日志显示 The client was disconnected by the server …...
函数调用原理)
linux fork()函数调用原理
在Linux中,fork函数用于创建一个新的进程,该进程是调用进程的子进程。fork函数的实现涉及用户态和内核态之间的交互。下面我将详细说明fork函数在代码流程中的原理和用户态与内核态的交互过程。 用户态调用fork函数: 用户程序调用fork函数,该函数是libc库提供的一个封装函数…...

【电控笔记5.9】编码器脉冲计算速度MT法
总结 编码器的脉冲计算速度可以使用多种方法,其中一种常用的方法是“MT法” (Measuring Time Method),即测量时间法。该方法通过测量编码器脉冲间的时间来计算速度。这种方法在高精度速度测量中非常有效,特别是在速度较低时。 MT法计算速度的基本原理 MT法的基本原理是通过…...

go-zero 实战(4)
中间件 在 userapi 项目中引入中间件。go项目中的中间可以处理请求之前和之后的逻辑。 1. 在 userapi/internal目录先创建 middlewares目录,并创建 user.go文件 package middlewaresimport ("github.com/zeromicro/go-zero/core/logx""net/http&q…...

Claude Code 之父:2026 年我一行代码都没写,编程已被 AI 解决
2026 年,你还在一行一行敲代码吗?Claude Code 的创造者、Anthropic 核心人物 Boris Cherny,在公开访谈里抛出一句让整个行业震动的话:2026 年到现在,我没有写过一行代码。所有开发工作,100% 交给 AI 代理完…...

自制射频功率计:基于AD8317芯片,成本43欧元实现1MHz-10GHz测量
1. 项目概述:为什么我要亲手打造一台射频功率计在无人机和模型飞行器的圈子里,尤其是在我们荷兰FMS Spaarnwoude俱乐部,合规飞行是头等大事。我给我的八轴飞行器加装了云台相机和图传系统,工作在5.8GHz频段。根据本地法规…...

开启Python GUI开发新纪元:Tkinter Designer可视化界面自动化生成终极指南
开启Python GUI开发新纪元:Tkinter Designer可视化界面自动化生成终极指南 【免费下载链接】Tkinter-Designer An easy and fast way to create a Python GUI 🐍 项目地址: https://gitcode.com/gh_mirrors/tk/Tkinter-Designer 在Python GUI开发…...

RevSSH反向SSH隧道:无公网IP设备的安全远程运维方案
1. 这不是又一个SSH封装工具——RevSSH解决的是“根本性连接悖论”你有没有遇到过这样的场景:一台部署在客户内网的嵌入式设备,没有公网IP,NAT穿透失败,防火墙策略死死锁住所有入向端口,连ICMP都被禁了;或者…...

CSharpVerbalExpressions常见问题解答:解决开发者遇到的10个典型挑战
CSharpVerbalExpressions常见问题解答:解决开发者遇到的10个典型挑战 【免费下载链接】CSharpVerbalExpressions 项目地址: https://gitcode.com/gh_mirrors/cs/CSharpVerbalExpressions CSharpVerbalExpressions是一个强大的C#库,它通过类自然语…...

什么情况下会核销贷款
贷款核销的核心前提是:贷款被认定为 “损失类” 且经 “穷尽追偿” 仍无法收回,银行按监管与会计规则从账面冲销,但债权不消灭、仍可追偿。一、核心认定条件(满足其一即可)破产 / 注销 / 吊销:借款人和担保…...

ImageGlass:一个支持90+图像格式的轻量级Windows图片查看器
ImageGlass:一个支持90图像格式的轻量级Windows图片查看器 【免费下载链接】ImageGlass 🏞 A lightweight, versatile image viewer 项目地址: https://gitcode.com/gh_mirrors/im/ImageGlass 还在为Windows自带的图片查看器功能单一而烦恼吗&…...
)
【小白快速上手】 OpenClaw 安装部署全流程(含安装包)
OpenClaw 一键安装包|一键部署,告别复杂环境配置 适配系统:Windows10/11 64 位当前版本:v2.7.5(虾壳云版)核心优势:全程可视化操作,无需命令行、无需手动配置 Python/Node.js&#…...

5步快速上手OpenVSP:免费开源的飞机参数化设计终极指南
5步快速上手OpenVSP:免费开源的飞机参数化设计终极指南 【免费下载链接】OpenVSP A parametric aircraft geometry tool 项目地址: https://gitcode.com/gh_mirrors/ope/OpenVSP OpenVSP是一款由NASA开发的免费开源飞机参数化设计工具,让航空工程…...

如何快速上手SoundMind:10分钟完成音频逻辑推理模型训练
如何快速上手SoundMind:10分钟完成音频逻辑推理模型训练 【免费下载链接】SoundMind We introduce the Audio Logical Reasoning (ALR) dataset, consisting of 6,446 text-audio annotated samples specifically designed for complex reasoning tasks. Building o…...