用c++用4个凸函数(觉得啥好用用啥)去测试adam,rmsprop,adagrad算法的性能(谁先找到最优点)
为了测试 Adam、RMSProp 和 Adagrad 算法的性能,你可以使用四个凸函数进行实验。以下是一些常用的凸函数示例:
Rosenbrock 函数:
Booth 函数:
Himmelblau 函数:
Beale 函数:
你可以选择其中一个或多个函数来测试算法的性能。对于每个函数,你可以使用不同的初始点,并应用 Adam、RMSProp 和 Adagrad 算法来寻找最优点。最优点可以通过达到较低的函数值或满足预定精度条件来定义。
在实验过程中,你可以记录每个算法在不同函数和初始点上找到最优点的迭代次数、计算时间以及最终的函数值。通过比较这些指标,你可以评估每个算法的性能和效果。
请注意,算法的性能可能会因函数的形状和参数设置而有所不同。因此,建议你在不同的凸函数上进行多次实验,以获得更全面的性能比较结果。


#include <iostream>
#include <cmath>
#include <vector>// 定义凸函数类
class ConvexFunction {
public:virtual double evaluate(const std::vector<double>& x) = 0;
};// Rosenbrock 函数
class RosenbrockFunction : public ConvexFunction {
public:double evaluate(const std::vector<double>& x) override {double sum = 0.0;for (size_t i = 0; i < x.size() - 1; ++i) {double term1 = pow(x[i + 1] - pow(x[i], 2), 2);double term2 = pow(1 - x[i], 2);sum += 100 * term1 + term2;}return sum;}
};// Booth 函数
class BoothFunction : public ConvexFunction {
public:double evaluate(const std::vector<double>& x) override {double term1 = pow(x[0] + 2 * x[1] - 7, 2);double term2 = pow(2 * x[0] + x[1] - 5, 2);return term1 + term2;}
};// Himmelblau 函数
class HimmelblauFunction : public ConvexFunction {
public:double evaluate(const std::vector<double>& x) override {double term1 = pow(pow(x[0], 2) + x[1] - 11, 2);double term2 = pow(x[0] + pow(x[1], 2) - 7, 2);return term1 + term2;}
};// Beale 函数
class BealeFunction : public ConvexFunction {
public:double evaluate(const std::vector<double>& x) override {double term1 = pow(1.5 - x[0] + x[0] * x[1], 2);double term2 = pow(2.25 - x[0] + x[0] * pow(x[1], 2), 2);double term3 = pow(2.625 - x[0] + x[0] * pow(x[1], 3), 2);return term1 + term2 + term3;}
};// Adam 算法
std::vector<double> adam(const ConvexFunction& func, const std::vector<double>& initial_x, double learning_rate, int max_iterations) {std::vector<double> x = initial_x;std::vector<double> m(x.size(), 0.0);std::vector<double> v(x.size(), 0.0);double beta1 = 0.9;double beta2 = 0.999;double epsilon = 1e-8;for (int i = 0; i < max_iterations; ++i) {// 计算梯度std::vector<double> gradient(x.size(), 0.0);for (size_t j = 0; j < x.size(); ++j) {std::vector<double> x_plus_delta = x;x_plus_delta[j] += epsilon;double f_plus_delta = func.evaluate(x_plus_delta);gradient[j] = (f_plus_delta - func.evaluate(x)) / epsilon;}// 更新参数for (size_t j = 0; j < x.size(); ++j) {m[j] = beta1 * m[j] + (1 - beta1) * gradient[j];v[j] = beta2 * v[j] + (1 - beta2) * pow(gradient[j], 2);double m_hat = m[j] / (1 - pow(beta1, i + 1));double v_hat = v[j] / (1 - pow(beta2, i + 1));x[j] -= learning_rate * m_hat / (sqrt(v_hat) + epsilon);}}return x;
}// RMSProp 算法
std::vector<double> rmsprop(const ConvexFunction& func, const std::vector<double>& initial_x, double learning_rate, double decay_rate, int max_iterations) {std::vector<double> x = initial_x;std::vector<double> cache(x.size(), 0.0);double epsilon = 1e-8;for (int i = 0; i < max_iterations; ++i) {// 计算梯度std::vector<double> gradient(x.size(), 0.0);for (size_t j = 0; j < x.size(); ++j) {std::vector<double> x_plus_delta = x;x_plus_delta[j] += epsilon;double f_plus_delta = func.evaluate(x_plus_delta);gradient[j] = (f_plus_delta - func.evaluate(x)) / epsilon;}// 更新参数for (size_t j = 0; j < x.size(); ++j) {cache[j] = decay_rate * cache[j] + (1 - decay_rate) * pow(gradient[j], 2);x[j] -= learning_rate * gradient[j] / (sqrt(cache[j]) + epsilon);}}return x;
}// Adagrad 算法
std::vector<double> adagrad(const ConvexFunction& func, const std::vector<double>& initial_x, double learning_rate, int max_iterations) {std::vector<double> x = initial_x;std::vector<double> cache(x.size(), 0.0);double epsilon = 1e-8;for (int i = 0; i < max_iterations; ++i) {// 计算梯度std::vector<double> gradient(x.size(), 0.0);for (size_t j = 0; j < x.size(); ++j) {std::vector<double> x_plus_delta = x;x_plus_delta[j] += epsilon;double f_plus_delta = func.evaluate(x_plus_delta);gradient[j] = (f_plus_delta - func.evaluate(x)) / epsilon;}// 更新参数for (size_t j = 0; j < x.size(); ++j) {cache[j] += pow(gradient[j], 2);x[j] -= learning_rate * gradient[j] / (sqrt(cache[j]) + epsilon);}}return x;
}int main() {// 创建凸函数对象RosenbrockFunction rosenbrock;BoothFunction booth;HimmelblauFunction himmelblau;BealeFunction beale;// 设置算法参数double learning_rate = 0.01;double decay_rate = 0.9;int max_iterations = 1000;// 初始化初始点std::vector<double> initial_x = { 0.0, 0.0 };// 使用 Adam 算法找到最优点std::vector<double> adam_result = adam(rosenbrock, initial_x, learning_rate, max_iterations);std::cout << "Adam Result: (" << adam_result[0] << ", " << adam_result[1] << ")" << std::endl;// 使用 RMSProp 算法找到最优点std::vector<double> rmsprop_result = rmsprop(rosenbrock, initial_x, learning_rate, decay_rate, max_iterations);std::cout << "RMSProp Result: (" << rmsprop_result[0] << ", " << rmsprop_result[1] << ")" << std::endl;// 使用 Adagrad 算法找到最优点std::vector<double> adagrad_result = adagrad(rosenbrock, initial_x, learning_rate, max_iterations);std::cout << "Adagrad Result: (" << adagrad_result[0] << ", " << adagrad_result[1] << ")" << std::endl;return 0;
}
相关文章:

用c++用4个凸函数(觉得啥好用用啥)去测试adam,rmsprop,adagrad算法的性能(谁先找到最优点)
为了测试 Adam、RMSProp 和 Adagrad 算法的性能,你可以使用四个凸函数进行实验。以下是一些常用的凸函数示例: Rosenbrock 函数: Booth 函数: Himmelblau 函数: Beale 函数: 你可以选择其中一个或多…...
AJAX初级
AJAX的概念: 使用浏览器的 XMLHttpRequest 对象 与服务器通信 浏览器网页中,使用 AJAX技术(XHR对象)发起获取省份列表数据的请求,服务器代码响应准备好的省份列表数据给前端,前端拿到数据数组以后…...

重载大于号运算符,比较复数大小
本题目要求编写代码的功能为: 输入两个复数(变量名自拟),比较复数模的大小,复数实部与虚部都是整数 要求输入时输入4个整数,分别代表复数1的实部、虚部,复数2的实部虚部 输入格式: 在同一行中输…...
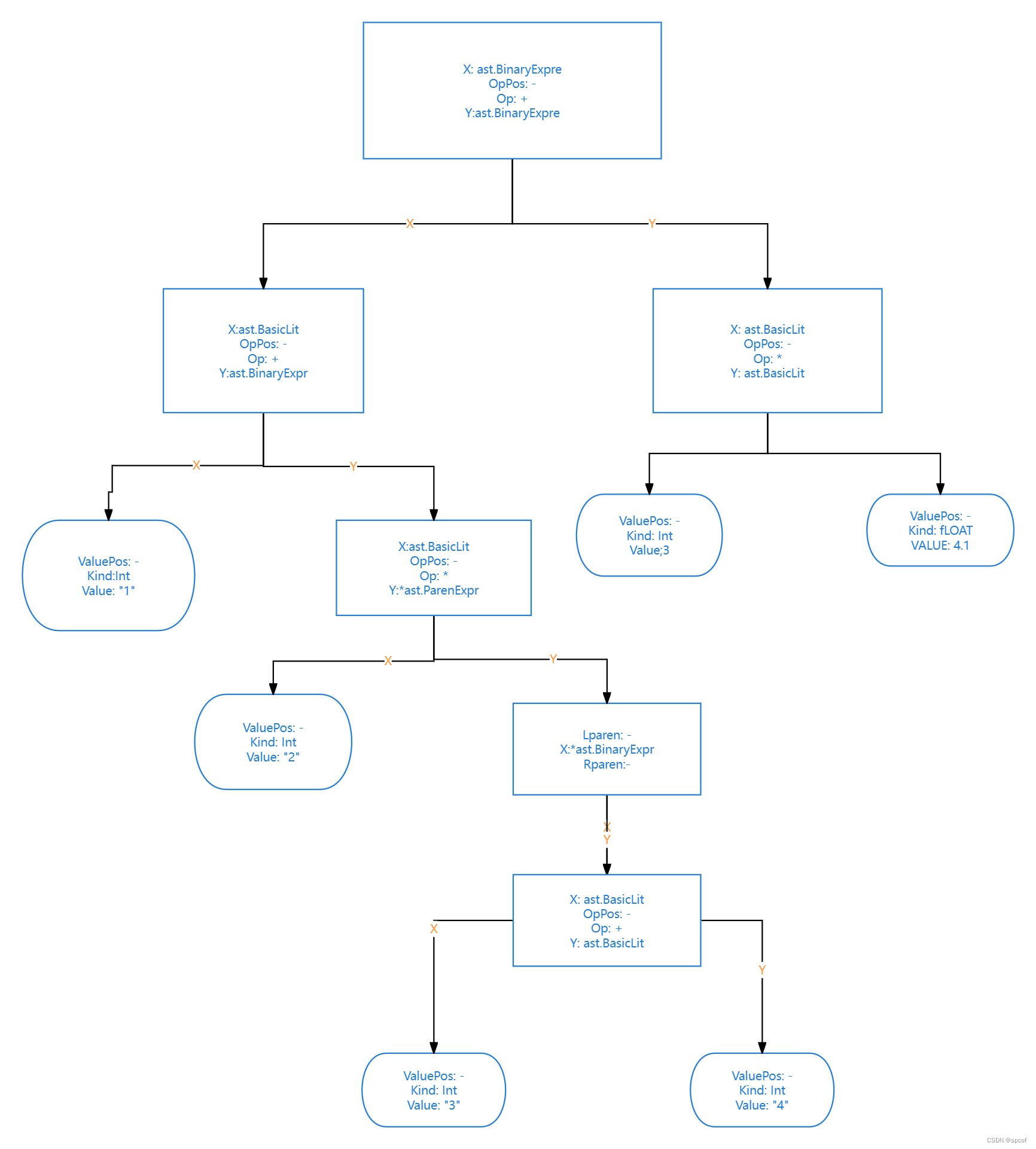
go ast语义分析实现指标计算器
什么是AST 首先我们要知道AST是什么(Abstract Syntax Tree,AST),简称为语法树,是go语言源代码语法结构的一种抽象表示。它以树状的形式表现编程语言的语法结构,树上的每个节点都表示源代码中的一种结构。 …...

【Vue】组件间传参与方法调用
【前言】 … 【目标】 1 了解组件间传参 2 组件间自定义事件绑定与解绑 3 组件的事件总线 4 消息订阅与发布 一 组件间传参 1 props 引入并使用组件:传递参数 <template><div id="app"><HelloWorld :msg="msg" :name="name" …...

类和对象2
三、C对象模型和this指针 3.1 成员变量和成员函数分开存储 在C中,类内的成员变量和成员函数分开存储,只有非静态成员变量才属于类的对象上 #define _CRT_SECURE_NO_WARNINGS 1 #include <iostream> #include <string.h> using namespace …...
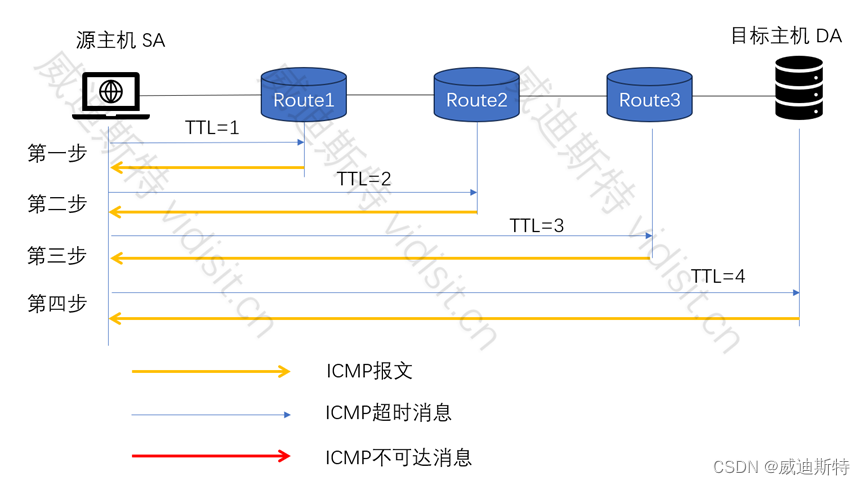
Linux系统命令traceroute详解(语法、选项、原理和实例)
目录 一、traceroute概述 二、语法 1、基本语法 2、命令选项 三、帮助信息 四、示例 1. 使用默认模式(ICMP Echo)追踪到目标主机 2. 使用UDP模式(需要root权限)追踪到目标主机 3. 不解析IP地址为主机名,直接显…...

中兴通讯助力中国移动,推动SPN AI节能技术于23省规模部署
SPN作为中国移动自主创新的新一代综合承载网络,相比PTN设备,SPN的单机容量及性能有大幅提升,整机功耗也相应变大。在当前国家双碳政策的目标下,SPN设备的节能降耗也日益成为中国移动关注的焦点。因此,中国移动选择与中…...

SQL Server--死锁
今天,客户反应打不开xxx页面了。好家伙肯定锁表了。。。。。 只能先吧死锁进程先kill掉,不能耽误客户生产环境运行。。。。。 一定要看看是那张表发生了死锁 1、查询死锁语句 select dbid,* from sys.sysprocesses where 11 and spid >50 and blo…...

中科蓝讯AB32VG1中文寄存器说明GPIO端口操作
1 GPIO管理 1.1 GPIO通用控制寄存器 寄存器 1- 1 GPIOA:端口 A 数据寄存器 位寄存器名模式缺省描述31:8---未使用7:0GPIOA写0x00PAx 数据。当 PAx 用作 GPIO 时有效 0:读取时PAx为输入低电平状态,写入时PAx为输出低电平; 1:PAx…...
如何查看热门GPT应用?
1、登陆chatgpt 2、访问 https://chatgpt.com/gpts 3、在该界面,可以搜索并使用image generator, Write For Me,Language Teature等热门应用。...

C++中的各种定义
文章目录 前言一、1、unsigned2、_countof、sizeof 总结 前言 一、 1、unsigned 在C语言中,"unsigned"是一个数据类型修饰符,用于修饰整数类型,表示该类型的变量只能存储非负整数,即无符号整数。它可以应用于char、s…...
)
Java面向对象-常用类(日期时间类)
常用类-日期时间类 Date(java.util.Date) – 日期类 SimpleDateFormat – 格式化日期类 Calendar – 日历类 1 Date类 java.util.Date类表示特定的瞬间,精确到毫秒。 package com.qf.datetime;import java.util.Date;public class Test01 {…...
Shell环境变量深入:自定义系统环境变量
Shell环境变量深入:自定义系统环境变量 目标 能够自定义系统级环境变量 全局配置文件/etc/profile应用场景 当前用户进入Shell环境初始化的时候会加载全局配置文件/etc/profile里面的环境变量, 供给所有Shell程序使用 以后只要是所有Shell程序或命令使用的变量…...
【C++课程学习】:命名空间的理解(图文详解)
🎁个人主页:我们的五年 🔍系列专栏:C课程学习 🎉欢迎大家点赞👍评论📝收藏⭐文章 目录 📷1.命名冲突 📷2.重定义 📷3.命名空间 🍺命名空间可…...
鸿蒙ArkUI-X平台差异化:【运行态差异化(@ohos.deviceInfo)】
平台差异化 简介 跨平台使用场景是一套ArkTS代码运行在多个终端设备上,如Android、iOS、OpenHarmony(含基于OpenHarmony发行的商业版,如HarmonyOS Next)。当不同平台业务逻辑不同,或使用了不支持跨平台的API…...

蓝牙Mesh模块组网时无线回程影响速率吗?
随着科技的发展,智能家居、智能办公等场景越来越广泛地应用于我们的生活。其中,蓝牙Mesh组网技术作为一种新型的无线通信技术,受到了越来越多用户的关注。那么,蓝牙Mesh模块在组网时无线回程过程中是否会影响速率呢?本…...
将3D检测的box框投影到BEV图片上
前言 点云数据作为一种丰富的三维空间信息表达方式,通常用于自动驾驶、机器人导航和三维建模等领域。然而,点云数据的直观性不如二维图像,这限制了它在一些需要快速视觉反馈的应用场景中的使用。本文将探讨如何将点云数据转换为二维图像&…...

Flutter 中的 ClipOval 小部件:全面指南
Flutter 中的 ClipOval 小部件:全面指南 在Flutter的丰富布局库中,ClipOval是一个用于裁剪子组件的显示区域为椭圆形或圆形的小部件。这种裁剪效果可以用于创建头像、图标或其他图形元素的美观边框。本文将提供ClipOval的全面指南,帮助你了解…...

ubuntu 硬盘转移
我插了两个 文件系统: ubuntu 硬盘转移: sudo dd if/dev/sdX1 of/dev/sdY1 bs128K convnoerror,sync statusprogressdd 的意思是DiskToDisk,if 是输入文件系统,of是输出文件系统。 bs是每次传递的数据大小。 注意:接…...

抖音批量下载神器:5分钟学会免费无水印视频下载
抖音批量下载神器:5分钟学会免费无水印视频下载 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support. 抖…...

Windows安卓应用安装终极指南:5分钟实现跨平台应用自由
Windows安卓应用安装终极指南:5分钟实现跨平台应用自由 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 还在为Windows电脑无法直接安装安卓应用而烦恼吗&am…...

后端开发者体验 AI 前端:用 TinyVue 做一个智能业务表单 Demo
摘要 作为 Java 后端开发者,我平时更多关注接口、SQL 和业务逻辑,但后台系统里也绕不开表单、列表和报表页面。本文结合 OpenTiny NEXT 学习体验,用 TinyVue 做一个智能业务表单 Demo,聊聊 AI 前端对后端开发者到底有没有实际帮助…...

基于傅里叶神经算子的含时密度泛函理论加速模拟
1. 项目概述与核心思路在计算材料科学和量子化学领域,模拟电子在激光等外场驱动下的动力学行为,是理解光催化、光电转换、甚至量子计算基础过程的关键。含时密度泛函理论(TDDFT)是处理这类问题的“金标准”之一,它通过…...

Arm Cortex-M的FP和MVE
Floating-point Support目前Arm architecture支持的floating-point extension版本是FPv5。FPv5提供了以下功能:单精度算术运算;可选的双精度算术运算;整数、双精度、单精度、和半精度格式之间的转换;用于浮点处理的寄存器…...
)
避坑指南:在Unity里用sherpa-onnx做离线TTS,我踩过的那些‘坑’(采样率、尾音、模型选择)
Unity集成sherpa-onnx离线TTS实战避坑指南第一次在Unity里听到自己合成的机械音时,那种兴奋感至今难忘——直到发现所有音频都像上世纪电话录音一样失真。原来sherpa-onnx默认生成的8000Hz采样率音频,在Unity的44100Hz标准环境下直接播放会产生严重的音质…...

IwaraDownloadTool:3种突破性技术实现的专业级Iwara视频批量下载方案
IwaraDownloadTool:3种突破性技术实现的专业级Iwara视频批量下载方案 【免费下载链接】IwaraDownloadTool Iwara 下载工具 | Iwara Downloader 项目地址: https://gitcode.com/gh_mirrors/iw/IwaraDownloadTool 在数字内容创作日益丰富的今天,Iwa…...

2026 收藏版|LangGraph 智能体三大核心工作流,程序员零基础上手大模型开发
本篇全面剖析 2026 主流 LangGraph 智能体三类经典工作流架构,依托任务拆分校验、智能任务分发、多任务并行处理三种思路,全方位提升大模型智能体运行精度与处理效率。每类模式均搭配可直接运行的实战代码案例,贴合新手学习场景,帮…...
)
避坑指南:UE球形遮罩材质边缘闪烁、接缝问题分析与修复(附完整节点图)
深度解析:UE球形遮罩材质边缘闪烁与接缝问题的终极解决方案在虚幻引擎中实现球形遮罩效果是许多项目中的常见需求,但开发者们往往会遇到一个棘手的问题——遮罩边缘出现闪烁、锯齿或明显的接缝。这种现象不仅影响视觉效果,还可能破坏场景的整…...
Transformer模型推理性能实测:PyTorch+A10 GPU与MLX+Apple Silicon对比
1. 项目概述与背景最近在部署几个基于Transformer的NLP服务时,遇到了一个经典的选择题:是继续沿用我们团队熟悉的PyTorch NVIDIA GPU方案,还是尝试拥抱苹果生态,用MLX框架在Mac上跑推理?这个问题在团队内部引发了不小…...