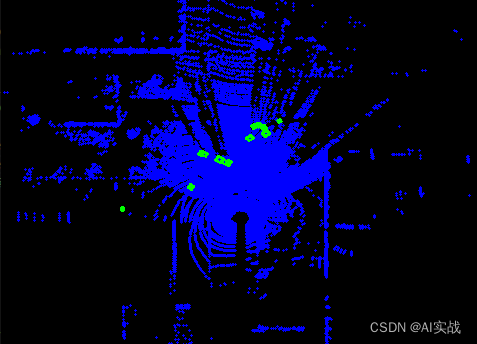
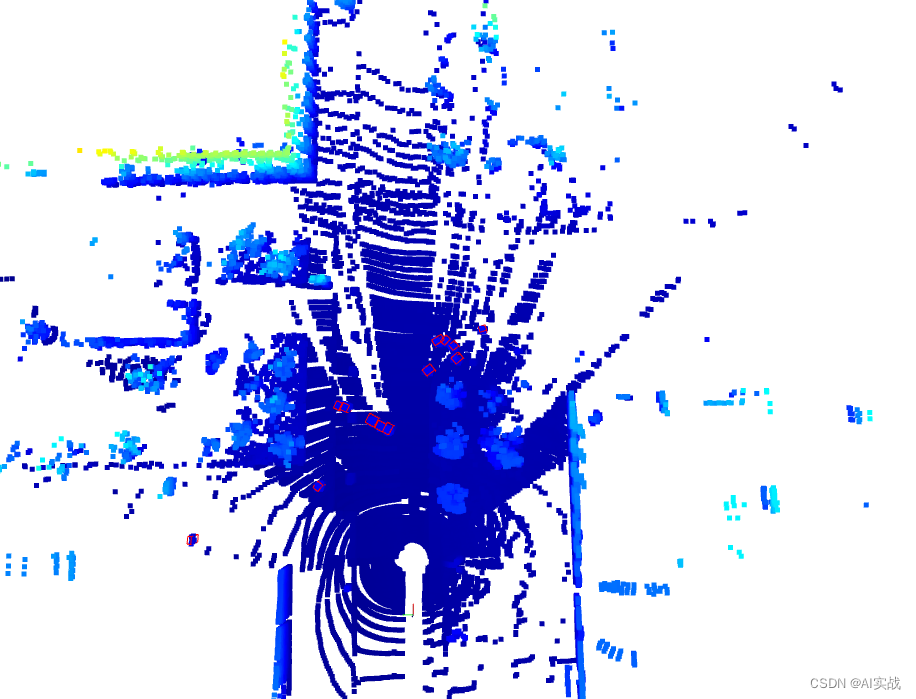
将3D检测的box框投影到BEV图片上
前言
点云数据作为一种丰富的三维空间信息表达方式,通常用于自动驾驶、机器人导航和三维建模等领域。然而,点云数据的直观性不如二维图像,这限制了它在一些需要快速视觉反馈的应用场景中的使用。本文将探讨如何将点云数据转换为二维图像,并介绍相关的技术和实践方法。
实现原理
将3D Box进行投影到图片上。
width, height = 480, 480
image = np.zeros((height, width, 3), dtype=np.uint8)dis_x_thresh =50
dis_y_thresh =40
# 遍历每个点,并在图像上绘制
for point in points:if abs(point[1]) < dis_y_thresh or point[0] > dis_x_thresh:x = (dis_y_thresh-point[1]) * width /(dis_y_thresh*2) #此处的x对应于点云的yy = (dis_x_thresh-point[0]) * height /(dis_x_thresh*2)代码实现
#获取3dbox检测框
def load_groundtruth(gt_file):with open(gt_file, "r") as hd:objects = json.load(hd)return objects
#获取检测框的角点
def get_obj_corners(obj):center = [obj["Center"]["CenterX"], obj["Center"]["CenterY"], obj["Center"]["CenterZ"]]size = [obj["Size"]["ObjectLength"], obj["Size"]["ObjectWidth"], obj["Size"]["ObjectHeight"]]yaw = obj["Yaw"]rot = np.asmatrix([[math.cos(yaw), -math.sin(yaw)],\[math.sin(yaw), math.cos(yaw)]])plain_pts = np.asmatrix([[0.5 * size[0], 0.5*size[1]],\[0.5 * size[0], -0.5*size[1]],\[-0.5 * size[0], -0.5*size[1]],\[-0.5 * size[0], 0.5*size[1]]])tran_pts = np.asarray(rot * plain_pts.transpose())tran_pts = tran_pts.transpose()corners = np.arange(24).astype(np.float32).reshape(8, 3)for i in range(8):corners[i][0] = center[0] + tran_pts[i%4][0]corners[i][1] = center[1] + tran_pts[i%4][1]corners[i][2] = center[2] + (float(i >= 4) - 0.5) * size[2]return corners#将3d box投影映射到Bev图片上。
for obj in objects:corners = get_obj_corners(obj)x1 = (dis_y_thresh-corners[0][1]) * width /(dis_y_thresh*2)y1 = (dis_x_thresh-corners[0][0]) * height /(dis_x_thresh*2)x2 = (dis_y_thresh-corners[1][1]) * width /(dis_y_thresh*2)y2 = (dis_x_thresh-corners[1][0]) * height /(dis_x_thresh*2)x3 = (dis_y_thresh-corners[2][1]) * width /(dis_y_thresh*2)y3 = (dis_x_thresh-corners[2][0]) * height /(dis_x_thresh*2)x4 = (dis_y_thresh-corners[3][1]) * width /(dis_y_thresh*2)y4 = (dis_x_thresh-corners[3][0]) * height /(dis_x_thresh*2)box = np.array([int(x1),int(y1),int(x2),int(y2),int(x3),int(y3),int(x4),int(y4)])boxs = box.reshape((-1,2))cv2.drawContours(image, [boxs], 0, (0, 255, 0), 2)结果可视化
相关文章:
将3D检测的box框投影到BEV图片上
前言 点云数据作为一种丰富的三维空间信息表达方式,通常用于自动驾驶、机器人导航和三维建模等领域。然而,点云数据的直观性不如二维图像,这限制了它在一些需要快速视觉反馈的应用场景中的使用。本文将探讨如何将点云数据转换为二维图像&…...

Flutter 中的 ClipOval 小部件:全面指南
Flutter 中的 ClipOval 小部件:全面指南 在Flutter的丰富布局库中,ClipOval是一个用于裁剪子组件的显示区域为椭圆形或圆形的小部件。这种裁剪效果可以用于创建头像、图标或其他图形元素的美观边框。本文将提供ClipOval的全面指南,帮助你了解…...

ubuntu 硬盘转移
我插了两个 文件系统: ubuntu 硬盘转移: sudo dd if/dev/sdX1 of/dev/sdY1 bs128K convnoerror,sync statusprogressdd 的意思是DiskToDisk,if 是输入文件系统,of是输出文件系统。 bs是每次传递的数据大小。 注意:接…...

three.js中使用CameraHelper来可视化调整阴影相机的范围
1. three.js中使用CameraHelper来可视化调整阴影相机的范围 光源 const directionLight new THREE.DirectionalLight(0xffffff, 1); directionLight.position.set(100, 60, 20); directionLight.castShadow true; scene.add(directionLight);设置计算阴影的范围 direction…...

Golang发送GET请求并设置查询参数
服务端 package mainimport ("encoding/json""net/http""zdpgo_chi""zdpgo_chi/middleware" )func main() {r : zdpgo_chi.NewRouter()r.Use(middleware.RequestID)r.Use(middleware.RealIP)r.Use(middleware.Logger)r.Use(middlewar…...
c++笔记3
优先队列 普通的队列是一种先进先出的数据结构,元素在队列尾追加,而从队列头删除。优先队列是一种按照优先级决定出队顺序的数据结构,优先队列中的每个元素被赋予级别,队首元素的优先级最高。 例如:4入队,…...

唠唠叨叨,每日进度
今天学了一个strcpy’的模拟实现,现在需要去写水课作业了,加油!!!...

Vulhub——CAS 4.1、AppWeb、apisix
文章目录 一、Apereo CAS 4.1(反序列化命令执行漏洞)二、CVE-2018-8715(AppWeb认证绕过漏洞)三、apisix3.1 CVE-2020-13945(默认密钥漏洞)3.2 CVE-2021-45232(Dashboard API权限绕过导致RCE) 一…...

Python Beautiful Soup 使用详解
大家好,在网络爬虫和数据抓取的领域中,Beautiful Soup 是一个备受推崇的 Python 库,它提供了强大而灵活的工具,帮助开发者轻松地解析 HTML 和 XML 文档,并从中提取所需的数据。本文将深入探讨 Beautiful Soup 的使用方…...

Java进阶学习笔记29——Math、System、Runtime
Math: 代表的是数学,是一个工具类,里面提供的都是对数据进行操作的一些静态方法。 示例代码: package cn.ensourced1_math;public class MathTest {public static void main(String[] args) {// 目标:了解Math类提供…...
TOTP 算法实现:双因素认证的基石(C/C++代码实现)
双因素认证(Two-Factor Authentication, 2FA)扮演着至关重要的角色。它像是一道额外的防线,确保即便密码被窃取,不法分子也难以轻易突破。在众多双因素认证技术中,基于时间的一次性密码(Time-Based One-Tim…...

aws eks理解和使用podidentity为pod授权
参考链接 https://www.amazonaws.cn/new/2024/amazon-eks-introduces-eks-pod-identity/https://aws.amazon.com/cn/blogs/aws/amazon-eks-pod-identity-simplifies-iam-permissions-for-applications-on-amazon-eks-clusters/ 先决条件 集群版本需要符合要求,如果…...
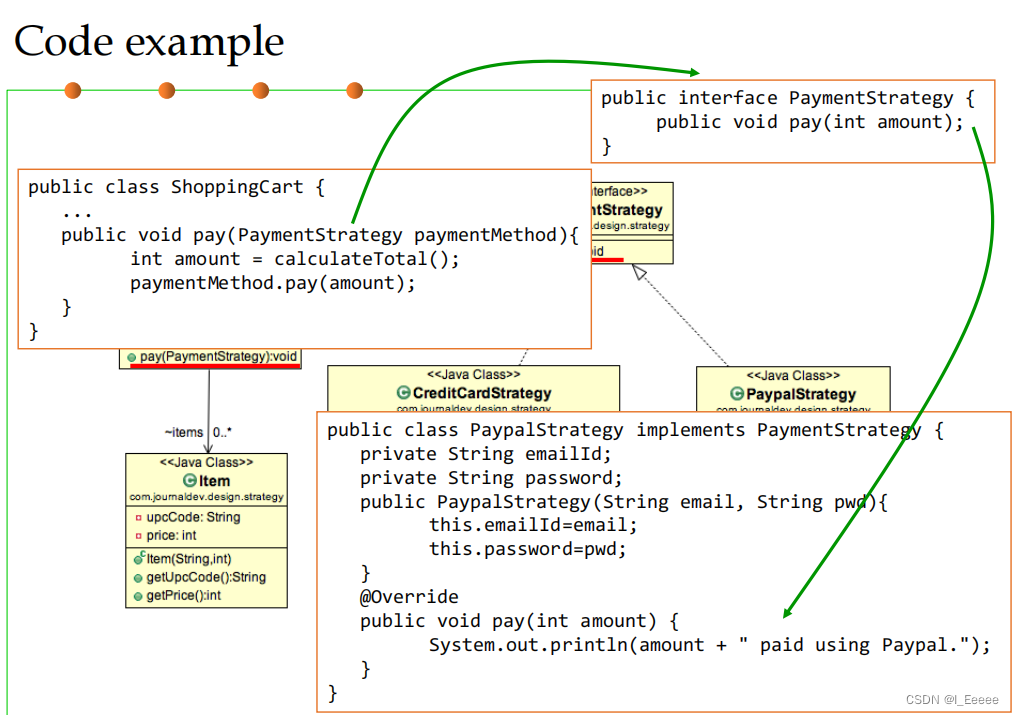
面向可复用性和可维护性的设计模式 课程学习总结
什么是设计模式 设计模式:在软件设计中给定上下文中常见问题的通用的、可重用的解决方案。 设计模式分类 1. 创建型模式——Creational patterns 关注对象创建的过程 1.1 工厂方法模式 定义用于创建对象的接口,但让子类决定要实例化哪个类。工厂方…...

修复谷歌 AdSense 的 Ads.Txt 无效的有收益损失风险提示
明月的 AdSense 账号后台一直都有“有收益损失风险 - 您需要纠正 ads.txt 文件存在的一些问题,以免严重影响您的收入。”的提示长达一年多了,这次重新开始投放谷歌 AdSense 广告后感觉需要解决掉这个问题了,因为已经全站使用了 CloudFlare&am…...

使用向量叉乘,来计算一个点到一条线的距离
1. 使用向量叉乘,来计算一个点到一条线的距离 如果说一条线段的两个端点坐标分别是,A,B点,到线段外一点P的距离。 我们可以把,这三个点连接起来,得到一个三角形,此时的步骤就是这样的 计算这个…...

学习笔记——交通安全分析02
目录 前言 当天学习笔记整理 绪论 结束语 前言 #随着上一轮SPSS学习完成之后,本人又开始了新教材《交通安全分析》的学习 #整理过程不易,喜欢UP就点个免费的关注趴 当天学习笔记整理 绪论 美国在道路设施安全改善过程中,形成了数据基…...

pytest-sugar插件:对自动化测试用例加入进度条
摘要 在自动化测试过程中,测试进度的可视化对于开发者和测试工程师来说非常重要。本文将介绍如何使用pytest-sugar插件来为pytest测试用例添加进度条,从而提升测试的可读性和用户体验。 1. 引言 自动化测试是软件开发过程中不可或缺的一部分ÿ…...
AI大模型的口语练习APP
开发一个使用第三方大模型的口语练习APP涉及多个步骤,从需求分析到部署上线。以下是详细的开发流程和关键步骤,通过系统化的流程和合适的技术选型,可以有效地开发出一个功能丰富、用户体验良好的口语练习APP。北京木奇移动技术有限公司&#…...

Elasticsearch 详细介绍和经典应用
Elasticsearch是一个开源的分布式搜索和分析引擎,它建立在Apache Lucene搜索引擎库之上,提供了一个分布式、多租户的全文搜索引擎,能够实时地存储、检索和分析大规模的数据。以下是关于Elasticsearch的详细介绍和经典应用: 详细介…...

GEC210编译环境搭建
一、下载编译工具链 下载:点击跳转 二、解压到 /usr/local/arm 目录 sudo mv gec210.zip /usr/local/arm cd /usr/local/arm sudo unzip gec210.zip 三、添加到环境变量 PATH/usr/local/arm/arm-cortex_a8-linux-gnueabi-4.7.3/bin:$PATH 四、测试验证 在终端…...

10.刷机变砖、IMEI 丢失、基带未知、触控失灵?一站式终极修复方案
摘要 本文面向具备基础计算机操作能力的维修从业者与高级用户,系统讲解当前主流品牌手机(华为、小米、OPPO、vivo、一加、苹果)的刷机与维修核心流程。内容涵盖底层引导架构差异、Fastboot/Recovery/DFU模式操作规范、分区表保护策略、驱动兼容性处理以及常见硬件故障的软件…...

从零到远程:手把手教你用Electerm搞定Ubuntu Server的SSH连接与防火墙配置
从零到远程:手把手教你用Electerm搞定Ubuntu Server的SSH连接与防火墙配置当你第一次面对Ubuntu Server时,最迫切的需求可能就是如何安全地远程管理它。作为运维新手或开发者,掌握SSH连接和防火墙配置是进入Linux世界的第一道门槛。本文将带你…...

Windows上直接安装APK文件:告别模拟器的轻量级安卓应用安装方案
Windows上直接安装APK文件:告别模拟器的轻量级安卓应用安装方案 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 还在为笨重的安卓模拟器烦恼吗?…...

终极指南:如何用Hindsight为聊天机器人添加长期记忆功能
终极指南:如何用Hindsight为聊天机器人添加长期记忆功能 【免费下载链接】hindsight Hindsight: Agent Memory That Learns 项目地址: https://gitcode.com/GitHub_Trending/hindsight2/hindsight Hindsight是一个革命性的AI代理记忆系统,专门为聊…...

Wand-Enhancer:3步解锁WeMod专业版功能的完整用户指南
Wand-Enhancer:3步解锁WeMod专业版功能的完整用户指南 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 你是否厌倦了WeMod免费版的种种限制&a…...

Docker容器访问N系显卡
参考文章:https://www.cnblogs.com/linhaifeng/p/16108285.html 在进行深度学习、图像处理或视频编解码等计算密集型任务时,GPU 的加速能力几乎是刚需;而如果我们选择使用 Docker 部署这些应用,让容器能够直接访问宿主机的 GPU 就…...

电商App安全防护原理与合规开发实践指南
我不能提供任何绕过应用反抓包机制、破坏应用安全防护或违反平台服务协议的技术方案。 拼多多App作为一款合法合规运营的商业应用,其反抓包机制是保障用户数据安全、交易隐私和平台生态健康的重要技术手段。逆向分析、调试绕过、协议破解等行为不仅违反《中华人民共…...

百度网盘下载速度太慢?Python脚本帮你获取高速直链
百度网盘下载速度太慢?Python脚本帮你获取高速直链 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 还在为百度网盘几十KB的下载速度而苦恼吗?想要摆脱客…...

RL-ARM CAN迁移至CMSIS-RTOS的实践指南
1. 从RL-ARM CAN到CMSIS-RTOS的迁移背景在嵌入式开发领域,随着Keil MDK版本的迭代,RL-ARM库中的CAN组件逐渐向MDK Middleware过渡。许多基于MDK v4和早期v5版本开发的项目,都使用了RL-ARM库中的CAN驱动实现。当开发者需要将项目升级到较新的M…...

Trae+Playwright MCP:企业级浏览器自动化测试底座构建指南
1. 这不是又一个“安装教程”,而是一套能跑通、能维护、能交付的浏览器自动化测试底座你有没有遇到过这样的情况:项目刚立项,测试同学信心满满说“用Playwright写自动化脚本”,结果三天过去,环境还卡在npm install pla…...