Mujoco仿真【xml文件的学习 4】
在学习Mujoco仿真的过程中,mujoco的版本要选择合适。先前我将mujoco的版本升级到了mujoco-3.1.4,在运行act的仿真代码时遇到了问题,撰写了博客:
Aloha机械臂的mujoco仿真问题记录-CSDN博客
下面在进行mujoco仿真时,统一安装如下包的版本:
pip install mujoco==2.3.7
pip install dm_control==1.0.14
好!承接上一篇博客:
Mujoco仿真【xml文件的学习 3】_mujoco打开xml文件-CSDN博客
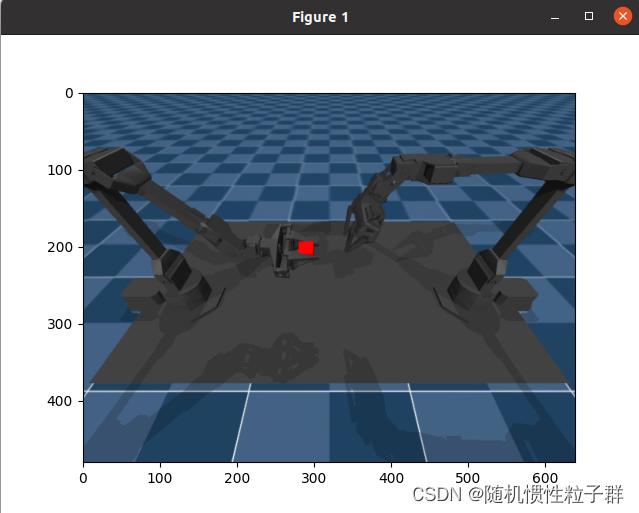
下面我们继续来学习mujoco仿真中的xml文件,这次以一个实际的案例来学习别人编写好的xml文件,本次的案例为aloha的双臂仿真平台【sim_transfer_cube_scripted】:
其中vx300s_dependencies.xml文件代码:
<mujocoinclude><compiler angle="radian" inertiafromgeom="auto" inertiagrouprange="4 5"/><asset><mesh name="vx300s_1_base" file="vx300s_1_base.stl" scale="0.001 0.001 0.001" /><mesh name="vx300s_2_shoulder" file="vx300s_2_shoulder.stl" scale="0.001 0.001 0.001" /><mesh name="vx300s_3_upper_arm" file="vx300s_3_upper_arm.stl" scale="0.001 0.001 0.001" /><mesh name="vx300s_4_upper_forearm" file="vx300s_4_upper_forearm.stl" scale="0.001 0.001 0.001" /><mesh name="vx300s_5_lower_forearm" file="vx300s_5_lower_forearm.stl" scale="0.001 0.001 0.001" /><mesh name="vx300s_6_wrist" file="vx300s_6_wrist.stl" scale="0.001 0.001 0.001" /><mesh name="vx300s_7_gripper" file="vx300s_7_gripper.stl" scale="0.001 0.001 0.001" /><mesh name="vx300s_8_gripper_prop" file="vx300s_8_gripper_prop.stl" scale="0.001 0.001 0.001" /><mesh name="vx300s_9_gripper_bar" file="vx300s_9_gripper_bar.stl" scale="0.001 0.001 0.001" /><mesh name="vx300s_10_gripper_finger_left" file="vx300s_10_custom_finger_left.stl" scale="0.001 0.001 0.001" /><mesh name="vx300s_10_gripper_finger_right" file="vx300s_10_custom_finger_right.stl" scale="0.001 0.001 0.001" /></asset></mujocoinclude>这段代码是一个 XML 格式的 Mujoco 模型文件的一部分,用于包含机器人手臂的模型文件和相关配置。以下是对其中各部分的详细解释:
-
<compiler>:编译器选项,用于设置模型的编译参数。angle="radian":角度单位设置为弧度。inertiafromgeom="auto":惯性矩从几何体自动计算。inertiagrouprange="4 5":定义了惯性矩计算的组范围。
-
<asset>:模型的资源部分,包含了机器人手臂的各个部件的网格模型文件和相关配置。<mesh>:定义了多个网格模型文件,每个文件对应一个机器人手臂的部件,如基座、肩部、上臂等。每个<mesh>元素包含以下属性:name:部件名称。file:部件对应的 STL 格式的网格模型文件。scale:模型缩放比例。
这段代码描述了一个包含机器人手臂各个部件模型文件的配置,用于构建机器人手臂的物理模拟环境。
其中vx300s_left.xml与vx300s_right.xml文件类似,我们选用vx300s_left.xml文件代码:
<mujocoinclude><body name="vx300s_left" pos="-0.469 0.5 0"><geom quat="0.707107 0 0 0.707107" type="mesh" mesh="vx300s_1_base" name="vx300s_left/1_base" contype="0" conaffinity="0" rgba="0.2 0.2 0.2 1" /><body name="vx300s_left/shoulder_link" pos="0 0 0.079"><inertial pos="0.000259233 -3.3552e-06 0.0116129" quat="-0.476119 0.476083 0.52279 0.522826" mass="0.798614" diaginertia="0.00120156 0.00113744 0.0009388" /><joint name="vx300s_left/waist" pos="0 0 0" axis="0 0 1" limited="true" range="-3.14158 3.14158" frictionloss="50" /><geom pos="0 0 -0.003" quat="0.707107 0 0 0.707107" type="mesh" mesh="vx300s_2_shoulder" name="vx300s_left/2_shoulder" rgba="0.2 0.2 0.2 1"/><body name="vx300s_left/upper_arm_link" pos="0 0 0.04805"><inertial pos="0.0206949 4e-10 0.226459" quat="0 0.0728458 0 0.997343" mass="0.792592" diaginertia="0.00911338 0.008925 0.000759317" /><joint name="vx300s_left/shoulder" pos="0 0 0" axis="0 1 0" limited="true" range="-1.85005 1.25664" frictionloss="60" /><geom quat="0.707107 0 0 0.707107" type="mesh" mesh="vx300s_3_upper_arm" name="vx300s_left/3_upper_arm" rgba="0.2 0.2 0.2 1"/><body name="vx300s_left/upper_forearm_link" pos="0.05955 0 0.3"><inertial pos="0.105723 0 0" quat="-0.000621631 0.704724 0.0105292 0.709403" mass="0.322228" diaginertia="0.00144107 0.00134228 0.000152047" /><joint name="vx300s_left/elbow" pos="0 0 0" axis="0 1 0" limited="true" range="-1.76278 1.6057" frictionloss="60" /><geom type="mesh" mesh="vx300s_4_upper_forearm" name="vx300s_left/4_upper_forearm" rgba="0.2 0.2 0.2 1"/><body name="vx300s_left/lower_forearm_link" pos="0.2 0 0"><inertial pos="0.0513477 0.00680462 0" quat="-0.702604 -0.0796724 -0.702604 0.0796724" mass="0.414823" diaginertia="0.0005911 0.000546493 0.000155707" /><joint name="vx300s_left/forearm_roll" pos="0 0 0" axis="1 0 0" limited="true" range="-3.14158 3.14158" frictionloss="30" /><geom quat="0 1 0 0" type="mesh" mesh="vx300s_5_lower_forearm" name="vx300s_left/5_lower_forearm" rgba="0.2 0.2 0.2 1"/><body name="vx300s_left/wrist_link" pos="0.1 0 0"><inertial pos="0.046743 -7.6652e-06 0.010565" quat="-0.00100191 0.544586 0.0026583 0.8387" mass="0.115395" diaginertia="5.45707e-05 4.63101e-05 4.32692e-05" /><joint name="vx300s_left/wrist_angle" pos="0 0 0" axis="0 1 0" limited="true" range="-1.8675 2.23402" frictionloss="30" /><geom quat="0.707107 0 0 0.707107" type="mesh" mesh="vx300s_6_wrist" name="vx300s_left/6_wrist" rgba="0.2 0.2 0.2 1"/><body name="vx300s_left/gripper_link" pos="0.069744 0 0"><body name="vx300s_left/camera_focus" pos="0.15 0 0.01"><site pos="0 0 0" size="0.01" type="sphere" name="left_cam_focus" rgba="0 0 1 0"/></body><site pos="0.15 0 0" size="0.003 0.003 0.03" type="box" name="cali_left_site1" rgba="0 0 1 0"/><site pos="0.15 0 0" size="0.003 0.03 0.003" type="box" name="cali_left_site2" rgba="0 0 1 0"/><site pos="0.15 0 0" size="0.03 0.003 0.003" type="box" name="cali_left_site3" rgba="0 0 1 0"/><camera name="left_wrist" pos="-0.1 0 0.16" fovy="20" mode="targetbody" target="vx300s_left/camera_focus"/><inertial pos="0.0395662 -2.56311e-07 0.00400649" quat="0.62033 0.619916 -0.339682 0.339869" mass="0.251652" diaginertia="0.000689546 0.000650316 0.000468142" /><joint name="vx300s_left/wrist_rotate" pos="0 0 0" axis="1 0 0" limited="true" range="-3.14158 3.14158" frictionloss="30" /><geom pos="-0.02 0 0" quat="0.707107 0 0 0.707107" type="mesh" mesh="vx300s_7_gripper" name="vx300s_left/7_gripper" rgba="0.2 0.2 0.2 1"/><geom pos="-0.020175 0 0" quat="0.707107 0 0 0.707107" type="mesh" mesh="vx300s_9_gripper_bar" name="vx300s_left/9_gripper_bar" rgba="0.2 0.2 0.2 1"/><body name="vx300s_left/gripper_prop_link" pos="0.0485 0 0"><inertial pos="0.002378 2.85e-08 0" quat="0 0 0.897698 0.440611" mass="0.008009" diaginertia="4.2979e-06 2.8868e-06 1.5314e-06" />
<!-- <joint name="vx300s_left/gripper" pos="0 0 0" axis="1 0 0" frictionloss="30" />--><geom pos="-0.0685 0 0" quat="0.707107 0 0 0.707107" type="mesh" mesh="vx300s_8_gripper_prop" name="vx300s_left/8_gripper_prop" rgba="0.2 0.2 0.2 1"/></body><body name="vx300s_left/left_finger_link" pos="0.0687 0 0"><inertial pos="0.017344 -0.0060692 0" quat="0.449364 0.449364 -0.54596 -0.54596" mass="0.034796" diaginertia="2.48003e-05 1.417e-05 1.20797e-05" /><joint name="vx300s_left/left_finger" pos="0 0 0" axis="0 1 0" type="slide" limited="true" range="0.021 0.057" frictionloss="30" /><geom condim="4" solimp="2 1 0.01" solref="0.01 1" friction="1 0.005 0.0001" pos="0.005 -0.052 0" euler="3.14 1.57 0" type="mesh" mesh="vx300s_10_gripper_finger_left" name="vx300s_left/10_left_gripper_finger" rgba="0.2 0.2 0.2 1"/></body><body name="vx300s_left/right_finger_link" pos="0.0687 0 0"><inertial pos="0.017344 0.0060692 0" quat="0.44937 -0.44937 0.545955 -0.545955" mass="0.034796" diaginertia="2.48002e-05 1.417e-05 1.20798e-05" /><joint name="vx300s_left/right_finger" pos="0 0 0" axis="0 1 0" type="slide" limited="true" range="-0.057 -0.021" frictionloss="30" /><geom condim="4" solimp="2 1 0.01" solref="0.01 1" friction="1 0.005 0.0001" pos="0.005 0.052 0" euler="3.14 1.57 0" type="mesh" mesh="vx300s_10_gripper_finger_right" name="vx300s_left/10_right_gripper_finger" rgba="0.2 0.2 0.2 1"/></body></body></body></body></body></body></body></body>
</mujocoinclude>这段代码是一个 XML 格式的 Mujoco 模型文件的一部分,用于描述机器人手臂的模型和相关配置。以下是对其中各部分的详细解释:
-
<mujocoinclude>:用于包含另一个 Mujoco 模型文件的标签,这里包含了机器人手臂的模型和配置信息。 -
<body>:定义了机器人手臂的主体部分,包括了各个连接部件和其位置信息。name="vx300s_left":机器人手臂的名称。pos="-0.469 0.5 0":机器人手臂的位置。
-
<geom>:定义了机器人手臂的几何形状,通常用于可视化和碰撞检测。quat="0.707107 0 0 0.707107":指定了几何体的旋转四元数。type="mesh":指定了几何体的类型为网格。mesh="vx300s_1_base":指定了该几何体所使用的网格模型。rgba="0.2 0.2 0.2 1":指定了几何体的颜色。
-
<inertial>:定义了每个连接部件的惯性参数。pos:惯性中心的位置。quat:惯性矩阵的旋转四元数。mass:部件的质量。diaginertia:惯性矩阵的对角线元素。
-
<joint>:定义了连接部件之间的关节。name:关节的名称。pos:关节的位置。axis:关节的旋转轴。limited="true":表示关节是否有限制。range:关节的运动范围。frictionloss:关节的摩擦损失。
-
<site>:定义了站位点,用于可视化和其他用途。pos:站位点的位置。size:站位点的大小。type:站位点的类型。
-
<camera>:定义了摄像机,用于模拟环境的观察。name:摄像机的名称。pos:摄像机的位置。fovy:摄像机的视场角。mode="targetbody":摄像机的模式,以指定的物体为目标。
-
<geom>:定义了机器人手臂的各个连接部件的几何形状。quat:指定了几何体的旋转四元数。type="mesh":指定了几何体的类型为网格。mesh:指定了该几何体所使用的网格模型。rgba:指定了几何体的颜色。
这段代码描述了一个机器人手臂的模型和配置信息,包括了各个连接部件的几何形状、惯性参数、关节、站位点以及摄像机等元素。
其中scene.xml文件代码:
<mujocoinclude>
<!-- <option timestep='0.0025' iterations="50" tolerance="1e-10" solver="Newton" jacobian="dense" cone="elliptic"/>--><asset><mesh file="tabletop.stl" name="tabletop" scale="0.001 0.001 0.001"/><!-- floor --><texture type="skybox" builtin="gradient" rgb1="0.3 0.5 0.7" rgb2="0 0 0" width="512" height="3072"/><texture type="2d" name="groundplane" builtin="checker" mark="edge" rgb1="0.2 0.3 0.4" rgb2="0.1 0.2 0.3"markrgb="0.8 0.8 0.8" width="300" height="300"/><material name="groundplane" texture="groundplane" texuniform="true" texrepeat="5 5" reflectance="0.2"/></asset><visual><map fogstart="1.5" fogend="5" force="0.1" znear="0.1"/><quality shadowsize="4096" offsamples="4"/>
<!-- <headlight ambient="0.4 0.4 0.4"/>--><headlight diffuse="0.6 0.6 0.6" ambient="0.3 0.3 0.3" specular="0 0 0"/><rgba haze="0.15 0.25 0.35 1"/><global azimuth="140" elevation="-30"/></visual><worldbody><!-- default castshadow = "false" --><light castshadow="true" directional='true' diffuse='.3 .3 .3' specular='0.3 0.3 0.3' pos='-1 -1 1'dir='1 1 -1'/><light directional='true' diffuse='.3 .3 .3' specular='0.3 0.3 0.3' pos='1 -1 1' dir='-1 1 -1'/><light castshadow="true" directional='true' diffuse='.3 .3 .3' specular='0.3 0.3 0.3' pos='0 1 1'dir='0 -1 -1'/><!-- floor --><body name="floor" pos="0 0 -0.001"><geom name="floor" size="0 0 0.01" type="plane" material="groundplane"/></body><body name="table" pos="0 .6 0"><geom group="1" mesh="tabletop" pos="0 0 0" type="mesh" conaffinity="1" contype="1" name="table" rgba="0.2 0.2 0.2 1" /></body><body name="midair" pos="0 .6 0.2"><site pos="0 0 0" size="0.01" type="sphere" name="midair" rgba="1 0 0 0"/></body><camera name="left_pillar" pos="-0.5 0.2 0.6" fovy="78" mode="targetbody" target="table"/><camera name="right_pillar" pos="0.5 0.2 0.6" fovy="78" mode="targetbody" target="table"/><camera name="top" pos="0 0.6 0.8" fovy="78" mode="targetbody" target="table"/><camera name="angle" pos="0 0 0.6" fovy="78" mode="targetbody" target="table"/><camera name="front_close" pos="0 0.2 0.4" fovy="78" mode="targetbody" target="vx300s_left/camera_focus"/></worldbody></mujocoinclude>这段代码是一个 XML 格式的 Mujoco 模型文件的一部分,用于描述一个模拟环境中的物体、光源和相机等元素。以下是对其中各部分的详细解释:
-
<mujocoinclude>:Mujoco 模型文件的包含标签,用于将其他文件的内容包含到当前文件中。 -
<asset>:模型的资源部分,定义了模型中使用的各种资产,如网格、纹理和材质。<mesh>:指定了一个网格文件作为桌面,定义了它的名称和缩放比例。<texture>:定义了两种类型的纹理:"skybox":用于模拟天空的渐变效果。"2d":用于地面的棋盘格纹理,包括颜色、尺寸和边缘标记。
<material>:定义了地面的材质,引用了前面定义的地面纹理,并设置了反射率和纹理重复参数。
-
<visual>:模型的可视化部分,用于定义模拟环境中的视觉效果。<map>:定义了雾化效果的参数,包括起始和结束位置以及力度。<quality>:设置了阴影和抗锯齿的参数。<headlight>:设置了头灯的参数,包括漫反射、环境光和高光。<rgba>:设置了雾化效果的颜色。<global>:设置了全局光照的方向。
-
<worldbody>:模型的世界部分,定义了模拟环境中的物体、光源和相机等元素。<light>:定义了三个光源,包括其类型、漫反射和高光等参数。<body>:定义了模拟环境中的物体,包括桌面和悬空的物体。- 桌面:由一个平面几何体组成,使用前面定义的地面材质。
- 悬空的物体:这里只是一个站位点,未指定具体的几何形状。
<camera>:定义了多个摄像机,包括其位置、视场角和模式等参数。其中,mode="targetbody"表示摄像机会以指定的物体为目标,视角随之调整。
这个模型文件描述了一个简单的模拟环境,其中包括一个桌面、一个悬空的物体和多个摄像机,用于模拟不同视角的变化。
其中bimanual_viperx_ee_transfer_cube.xml文件代码:
<mujoco><include file="scene.xml"/><include file="vx300s_dependencies.xml"/><equality><weld body1="mocap_left" body2="vx300s_left/gripper_link" solref="0.01 1" solimp=".25 .25 0.001" /><weld body1="mocap_right" body2="vx300s_right/gripper_link" solref="0.01 1" solimp=".25 .25 0.001" /></equality><worldbody><include file="vx300s_left.xml" /><include file="vx300s_right.xml" /><body mocap="true" name="mocap_left" pos="0.095 0.50 0.425"><site pos="0 0 0" size="0.003 0.003 0.03" type="box" name="mocap_left_site1" rgba="1 0 0 1"/><site pos="0 0 0" size="0.003 0.03 0.003" type="box" name="mocap_left_site2" rgba="1 0 0 1"/><site pos="0 0 0" size="0.03 0.003 0.003" type="box" name="mocap_left_site3" rgba="1 0 0 1"/></body><body mocap="true" name="mocap_right" pos="-0.095 0.50 0.425"><site pos="0 0 0" size="0.003 0.003 0.03" type="box" name="mocap_right_site1" rgba="1 0 0 1"/><site pos="0 0 0" size="0.003 0.03 0.003" type="box" name="mocap_right_site2" rgba="1 0 0 1"/><site pos="0 0 0" size="0.03 0.003 0.003" type="box" name="mocap_right_site3" rgba="1 0 0 1"/></body><body name="box" pos="0.2 0.5 0.05"><joint name="red_box_joint" type="free" frictionloss="0.01" /><inertial pos="0 0 0" mass="0.05" diaginertia="0.002 0.002 0.002" /><geom condim="4" solimp="2 1 0.01" solref="0.01 1" friction="1 0.005 0.0001" pos="0 0 0" size="0.02 0.02 0.02" type="box" name="red_box" rgba="1 0 0 1" /></body></worldbody><actuator><position ctrllimited="true" ctrlrange="0.021 0.057" joint="vx300s_left/left_finger" kp="200" user="1"/><position ctrllimited="true" ctrlrange="-0.057 -0.021" joint="vx300s_left/right_finger" kp="200" user="1"/><position ctrllimited="true" ctrlrange="0.021 0.057" joint="vx300s_right/left_finger" kp="200" user="1"/><position ctrllimited="true" ctrlrange="-0.057 -0.021" joint="vx300s_right/right_finger" kp="200" user="1"/></actuator><keyframe><key qpos="0 -0.96 1.16 0 -0.3 0 0.024 -0.024 0 -0.96 1.16 0 -0.3 0 0.024 -0.024 0.2 0.5 0.05 1 0 0 0"/></keyframe></mujoco>这段代码是一个完整的 Mujoco 模型文件,描述了一个模拟环境中的物体、关节、动作控制器等元素。让我们逐个解释其中的内容:
-
<include file="scene.xml"/>和<include file="vx300s_dependencies.xml"/>:引用了其他两个 XML 文件,将它们的内容包含到当前文件中。 -
<equality>:定义了两个关节的约束,使得两个物体固定在一起。<weld>:将两个物体通过关节连接在一起,设置了约束参数如刚度和阻尼等。
-
<worldbody>:模型的世界部分,定义了模拟环境中的各种物体。<include file="vx300s_left.xml" />和<include file="vx300s_right.xml" />:引用了两个 XML 文件,将机器人的左臂和右臂的模型包含进来。<body mocap="true" name="mocap_left" pos="0.095 0.50 0.425">和<body mocap="true" name="mocap_right" pos="-0.095 0.50 0.425">:定义了两个虚拟的 mocap 体,用于捕捉运动数据。<body name="box" pos="0.2 0.5 0.05">:定义了一个名为 box 的物体,用于模拟一个红色的盒子。<joint name="red_box_joint" type="free" frictionloss="0.01" />:定义了盒子的关节类型为自由关节,并设置了摩擦损耗。<inertial pos="0 0 0" mass="0.05" diaginertia="0.002 0.002 0.002" />:定义了盒子的惯性属性,包括质量和惯性张量。<geom condim="4" solimp="2 1 0.01" solref="0.01 1" friction="1 0.005 0.0001" pos="0 0 0" size="0.02 0.02 0.02" type="box" name="red_box" rgba="1 0 0 1" />:定义了盒子的几何形状和纹理颜色等属性。
-
<actuator>:定义了动作控制器,用于控制机器人的手指关节的运动。<position ctrllimited="true" ctrlrange="0.021 0.057" joint="vx300s_left/left_finger" kp="200" user="1"/>和<position ctrllimited="true" ctrlrange="-0.057 -0.021" joint="vx300s_left/right_finger" kp="200" user="1"/>:控制左臂机器人手指的位置。<position ctrllimited="true" ctrlrange="0.021 0.057" joint="vx300s_right/left_finger" kp="200" user="1"/>和<position ctrllimited="true" ctrlrange="-0.057 -0.021" joint="vx300s_right/right_finger" kp="200" user="1"/>:控制右臂机器人手指的位置。
-
<keyframe>:定义了一个关键帧,指定了各个关节的位置。<key qpos="0 -0.96 1.16 0 -0.3 0 0.024 -0.024 0 -0.96 1.16 0 -0.3 0 0.024 -0.024 0.2 0.5 0.05 1 0 0 0"/>:指定了各个关节的位置信息,用于模拟开始时的初始状态。qpos:这个属性定义了关节的位置。它包含了多个数值,每两个数值代表一个关节的位置信息。在这个关键帧中,一共有六个关节,因此包含了 6*2=12 个数值。- 这些数值代表了每个关节的位置或方向。例如,
0 -0.96 1.16 0 -0.3 0描述了左臂的一组关节位置,0.024 -0.024描述了右臂手指的位置,0.2 0.5 0.05描述了盒子的位置,1 0 0 0描述了盒子的方向。
这样,当模拟开始时,Mujoco 将模拟环境中的物体调整到这个关键帧指定的位置和方向,从而实现了初始状态的设定。
整个 <mujoco> 块描述了一个模拟环境中的物体、约束、控制器等元素,用于进行机器人控制和物体运动的仿真。
具体的仿真代码运行可视化效果【record_sim_episodes.py】:
相关文章:
Mujoco仿真【xml文件的学习 4】
在学习Mujoco仿真的过程中,mujoco的版本要选择合适。先前我将mujoco的版本升级到了mujoco-3.1.4,在运行act的仿真代码时遇到了问题,撰写了博客: Aloha机械臂的mujoco仿真问题记录-CSDN博客 下面在进行mujoco仿真时,统…...
vue数据持久化仓库
本文章是一篇记录实用性vue数据持久化仓的使用! 首先在src中创建store文件夹,并创建一个根据本页面相关的名称, 在终端导入:npm i pinia 和 npm i pinia-plugin-persistedstate 接下来引入代码: import { defineSt…...
OrangePi AIpro评测 - 基础操作篇
0. 环境 ●OrangePi AIpro ●win10笔记本 ●路由器 准备下win10电脑、路由器,这些板卡通常是在网络正常的环境下才方便测试。 还要准备OrangePi AIpro的官方资料: http://www.orangepi.cn/html/hardWare/computerAndMicrocontrollers/service-and-suppo…...
不含一阶导数项的线性二阶微分方程的通解
假设这里有一个线性二阶微分等式,形式如下: (1) 其中是连续的,是在实闭区间是连续的,如果有人倾向于推广,在相对假弱的假设下,这个结果能够被发现。如果是下列其次线性方程的任意两个线性无关的…...

Redis篇 String
String概念和set,get扩充 一. String类型的基本介绍二. String中set,get方法扩充 一. String类型的基本介绍 redis中所有的key都是字符串类型的,但是value的类型差异很大. redis中的字符串,直接就是二进制方式存储的,可以存储整数,二进制数据 文本数据,Json,xml还有音频等. 二.…...
【vue-2】v-on、v-show、v-if及按键修饰符
目录 1、v-on事件 2、按键修饰符 3、显示和隐藏v-show 4、条件渲染v-if 1、v-on事件 创建button按钮有以下两种方式: <button v-on:click"edit">修改</button> <button click"edit">修改</button> 完整示例代码…...
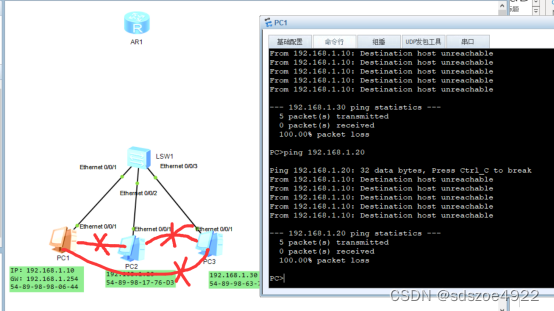
华为交换机基础实验----VLAN基础
交换机篇实验: 给交换机创建VLAN 1.单个VLAN的创建 [S]vlan 10 查看的方法:dis vlan 2.批量创建vlan的方法 Vlan b 20 30 40 连续创建三个vlan,分别为vlan20 vlan30和vlan40 [SONY-S1-vlan10]vlan b 20 30 40 3.批量创建连续的vlan…...

Vue3学习使用axios和qs进行POST请求和响应处理
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 一、前言1.准备工作2.发送POST请求3.处理响应数据4.总结 一、前言 在前端开发中,经常需要与后端进行数据交互,其中包括发送POST请求并处理响…...
张大哥笔记:赚钱高手养成计划---如何将一份时间产生N份收入?
我们常说的赚钱的四种境界有哪些? 1.靠体力挣钱 2.靠技能挣钱 3.靠知识挣钱 4.靠平台钱生钱 所以对应的收入的模式就会是下面4种模式: 1.一份时间卖1次 2.一份时间卖N次 3.一份时间溢价卖N次 4.购买他人时间为自己所用 时间对于每个人都是相同的…...
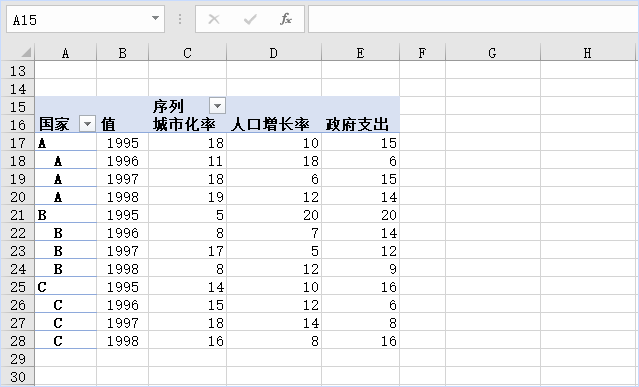
excel里如何将数据分组转置?
这个表格怎样转换为下表?按照国家来分组,把不同年份对应的不同序列值进行转置?? 这演示用数据透视表就完成这个数据转换。 1.创建数据透视表 选中数据中任意单元格,点击插入选项卡,数据透视表,…...

WHAT - 前端安全性测试和常见攻击手段
目录 一、安全性测试二、前端安全性测试三、跨站脚本(XSS)攻击1. 介绍2. 三大类型反射型 XSS(Reflected XSS)存储型 XSS(Stored XSS)DOM 型 XSS(DOM-based XSS) 3. xss 盲打4. xss 水…...

重量and体积,不要在傻傻的花冤枉钱寄快递了!
寄快递时有没有遇到过明明不重却被按体积收费的情况?别急,今天就来给大家揭秘快递收费的奥秘! 实际重量和体积重量! 首先,我们要明白两个概念:实际重量和体积重量。实际重量就是你看到的物品重量…...
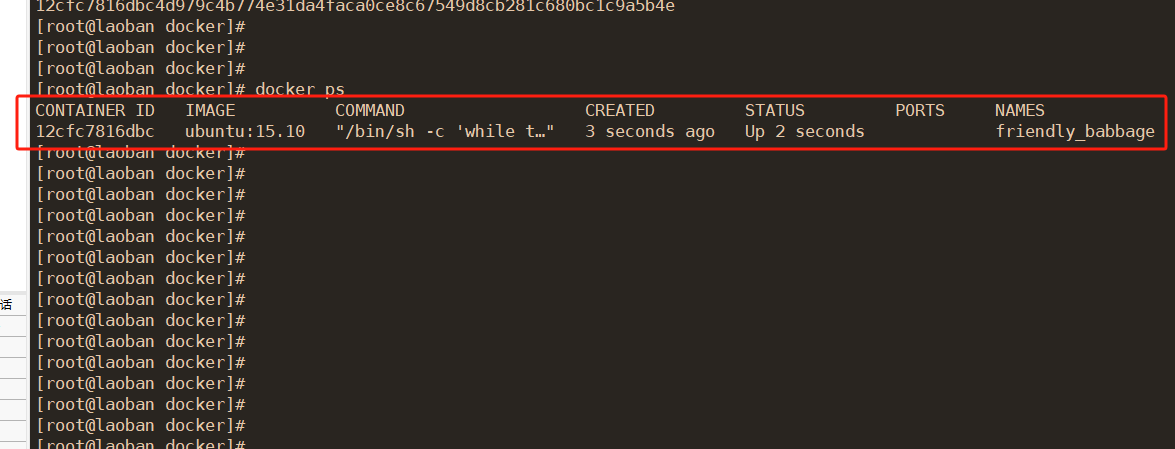
docker ps显示的参数具体是什么意思
1,运行一个容器 docker run -d ubuntu:15.10 /bin/sh -c "while true; do echo hello world; sleep 1; done"这段命令的作用是使用 docker run 命令运行一个基于 ubuntu:15.10 镜像的 Docker 容器,并在容器中执行一个无限循环的命令。 具体解…...

【C++】多态:编程中的“一人千面”艺术
目录 一、多态的概念二、多态的定义及实现1.多态的构成条件2.虚函数的重写2.1 什么是虚函数?2.2 虚函数的重写是什么?2.3 虚函数重写的两个例外2.4 C11 override 和 final2.5 重载、覆盖(重写)、隐藏(重定义)的对比 三、抽象类3.1 概念3.2 接口继承和实现…...
【必备工具】gitee上传-保姆级教程
目录 1.gitee是什么 2.gitee怎么注册 编辑 3.gitee怎么提交代码 4.gitee的三板斧 Clone仓库 Q&A 1. Gitee 只有三板斧吗? 2. Git 教了,Gitee 上没有绿点怎么办? 3. 用户名和密码输入错误怎么办? 4. 操作时不小心…...

P1115 最长子段和
题目描述 给出一个长度为 𝑛n 的序列 𝑎a,选出其中连续且非空的一段使得这段和最大。 输入格式 第一行是一个整数,表示序列的长度 𝑛。 第二行有 𝑛n 个整数,第 𝑖 个整数表示序列的…...
02 FreeRTOS 任务
1、创建任务函数 1.1 动态内存的使用 在之前我们如果要创建一个与学生有关的任务,我们会定义: //打印50个学生的信息 char name[50][100]; int age[50]; int sex[50]; //1表示男,0表示女 int score[50]; 如果之后要对其进行修改会非常麻烦&…...
NSS题目练习4
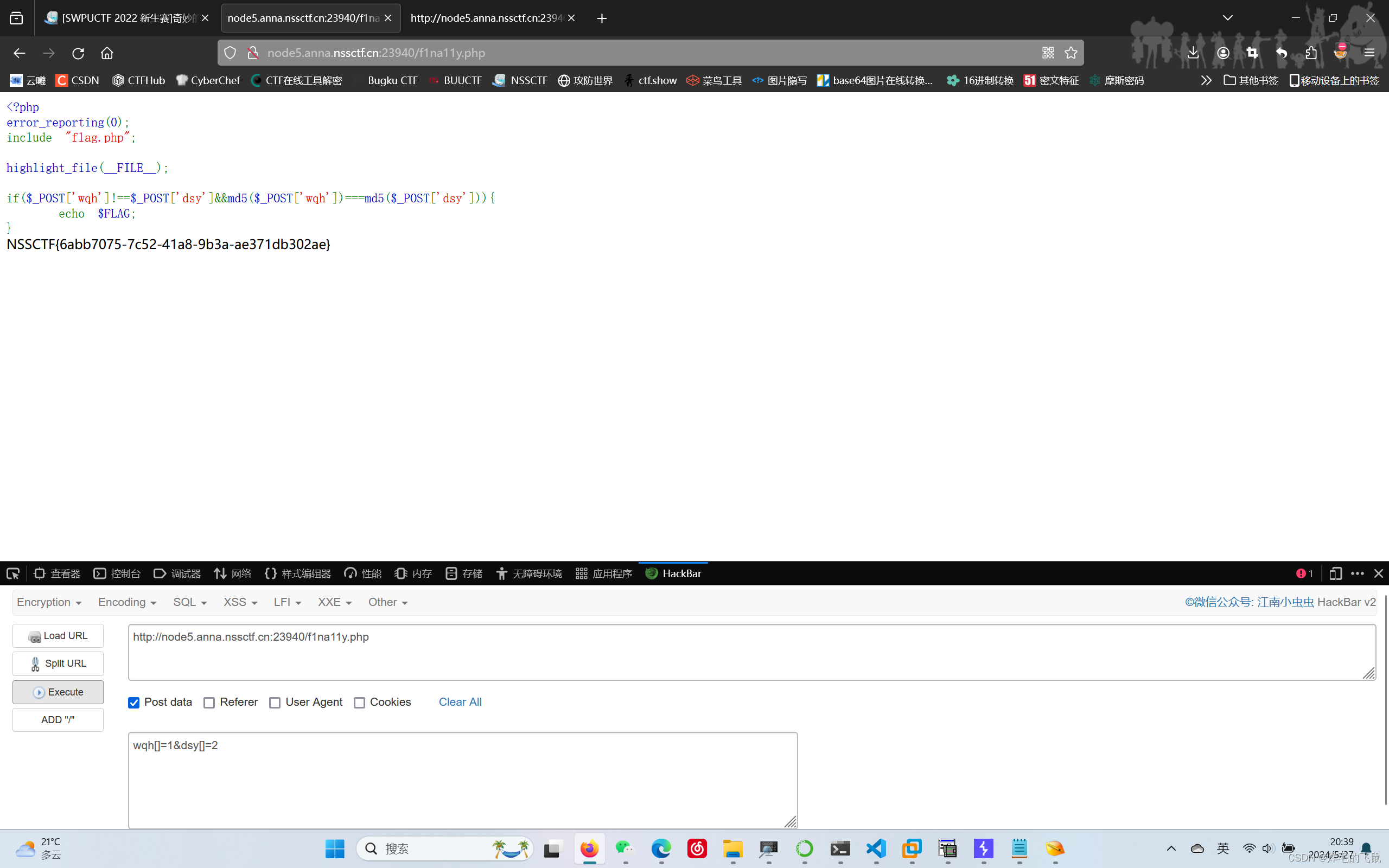
[LitCTF 2023]1zjs 打开后是一个游戏,用dirsearch扫描,什么都没发现 查看源代码搜索flag,发现没有什么用 搜索php,访问 出现一堆符号,看样子像是jother编码 解码得到flag,要删掉[] [LitCTF 2023]Http pro …...

【算法】合并k个已排序的链表
✨题目链接: NC51 合并k个已排序的链表 ✨题目描述 合并 k 个升序的链表并将结果作为一个升序的链表返回其头节点。 数据范围:节点总数 0≤𝑛≤50000≤n≤5000,每个节点的val满足 ∣𝑣𝑎𝑙∣&…...

【Muduo】三大核心之EventLoop
Muduo网络库的EventLoop模块是网络编程框架中的核心组件,负责事件循环的驱动和管理。以下是对EventLoop模块的详细介绍: 作用与功能: EventLoop是网络服务器中负责循环的重要模块,它持续地监听、获取和处理各种事件,…...

告别PyTorch依赖:手把手教你用C++ CUDA实现LeNet推理,从Python模型导出到C++部署全流程
从PyTorch到C CUDA:工业级LeNet模型部署全流程实战 在深度学习模型开发中,Python生态提供了丰富的训练工具,但生产环境往往需要高性能的C实现。本文将完整演示如何将PyTorch训练的LeNet模型部署到C CUDA环境,涵盖模型导出、内存管…...

免费德州扑克GTO求解器终极指南:如何用Desktop Postflop提升你的扑克决策能力
免费德州扑克GTO求解器终极指南:如何用Desktop Postflop提升你的扑克决策能力 【免费下载链接】desktop-postflop [Development suspended] Advanced open-source Texas Holdem GTO solver with optimized performance 项目地址: https://gitcode.com/gh_mirrors/…...

在Nodejs后端服务中集成Taotoken提供AI能力的配置指南
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在Nodejs后端服务中集成Taotoken提供AI能力的配置指南 将大模型能力集成到后端服务是现代应用开发的常见需求。对于使用Node.js的开…...

Gemini深度研究模式到底有多强?3个颠覆性实验结果揭示它如何重构科研工作流
更多请点击: https://kaifayun.com 第一章:Gemini深度研究模式到底有多强?3个颠覆性实验结果揭示它如何重构科研工作流 Gemini深度研究模式并非简单增强版对话功能,而是一套面向复杂知识任务的原生协同推理架构。其核心突破在于支…...

沐曦股份曦云C系列GPU完成腾讯混元翻译模型Hy-MT2 Day 0 深度适配
5月21日,腾讯混元翻译模型Hy-MT2正式开源,包含3个尺寸的模型Hy-MT2-1.8B、Hy-MT2-7B、Hy-MT2-30B-A3B。沐曦股份曦云C系列GPU凭借全栈自研技术优势,率先实现对三个模型的Day 0深度适配。此次腾讯混元宣布开源的三个模型均重点支持33个语种互译…...

T153核心板RISC-V实时核实战:从架构解析到电机控制应用
1. 项目概述:当RISC-V遇上实时性,T153核心板能做什么?最近几年,RISC-V架构在嵌入式领域的热度持续攀升,从最初的学术研究到如今在工业控制、物联网终端等场景的落地,其开放、灵活、可定制的特性吸引了无数开…...

通过curl命令快速测试Taotoken大模型聚合接口的连通性
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过curl命令快速测试Taotoken大模型聚合接口的连通性 在接入大模型服务时,直接使用curl命令进行接口测试是一种高效且…...

OpenRocket:开源火箭设计与飞行仿真的终极指南
OpenRocket:开源火箭设计与飞行仿真的终极指南 【免费下载链接】openrocket Model-rocketry aerodynamics and trajectory simulation software 项目地址: https://gitcode.com/GitHub_Trending/op/openrocket 你是否曾经梦想设计自己的火箭,但又…...
:Primary 与 Secondary ECU——汽车里的更新“主从“架构)
Uptane OTA入门(3):Primary 与 Secondary ECU——汽车里的更新“主从“架构
一、一辆汽车里有多少个"电脑"? 现代汽车早已不是简单的机械装置,而是一个移动的计算中心。 惊人的数字车型级别ECU 数量代码行数经济型轿车30-50 个1 亿行中高端轿车50-80 个1.5 亿行豪华/电动车80-150 个2 亿行对比:一架波音 787…...

Android Studio中文界面终极指南:告别英文困扰,3分钟打造母语开发环境
Android Studio中文界面终极指南:告别英文困扰,3分钟打造母语开发环境 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLangua…...