红外超声波雷达测距
文章目录
- 一HC-SR04介绍
- 1HC-SR04简介及工作原理
- 二用HAL库实现HC-SR04测量距离
- 1STM32CubeMX配置
- 2keil5
- 3代码的添加
- 三效果
一HC-SR04介绍
1HC-SR04简介及工作原理
超声波是振动频率高于20kHz的机械波。它具有频率高、波长短、绕射现象小、方向性好、能够成为射线而定向传播等特点。HC-SRO4是一款尺寸完全兼容老版本,增加UART和IIC功能的开放式超声波测距模块,默认条件下,软件与硬件完全兼容老版本HC-SRO4;可以通过电阻设置成UART或IIC模式。2CM盲区,4.5M典型最远测距,2.2mA作电流。采用升级解调芯片RCWL-9206,带UART与IIC功能MCU:使其外围更加简洁,工作电压更宽(3-5.5V),接口功能更多。
工作原理:
(1)采用 IO 口 TRIG 触发测距,给最少 10us 的高电平信呈。
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回。
(3)有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声
波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2。
二用HAL库实现HC-SR04测量距离
本文使用的MCU为STM32F103C8T6。
1STM32CubeMX配置
1创建一个工程
2RCC

3SYS

4时钟树

5GPIO

6串口1

7定时器2

8开启定时器中断

2keil5
1勾选Use MicroLiB

2创建SR04.c和SR04.h文件
3创建led.c和led.h文件
3代码的添加
main.
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** <h2><center>© Copyright (c) 2022 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "SR04.h"
#include "led.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){float distance = SR04_GetData();//HAL_Delay(1500);/* USER CODE END WHILE */// 根据距离计算闪烁频率uint32_t flashRate = CalculateFlashRate(distance);LED_Flash(flashRate); // 闪烁LED/* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
SR04.c
#include "SR04.h"
#include "stm32f1xx_hal.h" float distant; //测量距离
uint32_t measure_Buf[3] = {0}; //存放定时器计数值的数组
uint8_t measure_Cnt = 0; //状态标志位
uint32_t high_time; //超声波模块返回的高电平时间//===============================================读取距离
float SR04_GetData(void)
{switch (measure_Cnt){case 0:TRIG_H;delay_us(30);TRIG_L;measure_Cnt++;__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1); // 启动输入捕获break;case 3:high_time = measure_Buf[1] - measure_Buf[0]; // 高电平时间printf("\r\n----高电平时间-%d-us----\r\n", high_time);float distance = (high_time * 0.034f) / 2; // 单位cmprintf("\r\n-检测距离为-%.2f-cm-\r\n", distance);measure_Cnt = 0; // 清空标志位TIM2->CNT = 0; // 清空计时器计数// 返回计算得到的距离值return distance;}return 0; // 如果没有测量完成,返回0或合适的默认值
}//===============================================us延时函数void delay_us(uint32_t us)//主频72M
{uint32_t delay = (HAL_RCC_GetHCLKFreq() / 4000000 * us);while (delay--){;}
}//===============================================中断回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)//
{if(TIM2 == htim->Instance)// 判断触发的中断的定时器为TIM2{switch(measure_Cnt){case 1:measure_Buf[0] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值.__HAL_TIM_SET_CAPTUREPOLARITY(&htim2,TIM_CHANNEL_1,TIM_ICPOLARITY_FALLING); //设置为下降沿捕获measure_Cnt++; break; case 2:measure_Buf[1] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值.HAL_TIM_IC_Stop_IT(&htim2,TIM_CHANNEL_1); //停止捕获 或者: __HAL_TIM_DISABLE(&htim5);measure_Cnt++; }}}
SR04.h
#ifndef __SR04_H
#define __SR04_H
#include "main.h"
#include "tim.h"
#include "stdio.h"#define TRIG_H HAL_GPIO_WritePin(Trig_GPIO_Port,Trig_Pin,GPIO_PIN_SET)
#define TRIG_L HAL_GPIO_WritePin(Trig_GPIO_Port,Trig_Pin,GPIO_PIN_RESET)void delay_us(uint32_t us);
float SR04_GetData(void);#endif
led.c
#include "led.h"#define LED_GPIO_Port GPIOB
#define LED_Pin GPIO_PIN_9void LED_Init(void) {GPIO_InitTypeDef GPIO_InitStruct = {0};// 使能GPIOB时钟__HAL_RCC_GPIOB_CLK_ENABLE();// 配置GPIO Pin为推挽输出,无上拉电阻,低频率GPIO_InitStruct.Pin = LED_Pin;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(LED_GPIO_Port, &GPIO_InitStruct);
}void LED_Flash(uint32_t period) {// 切换LED状态HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);// 延时HAL_Delay(period);// 再次切换LED状态,完成一次闪烁HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
}uint32_t CalculateFlashRate(float distance) {uint32_t flashRate;if (distance < 10.0f) {flashRate = 100; // 距离小于10厘米时,快速闪烁} else if (distance < 50.0f) {flashRate = 500; // 距离在10-50厘米之间时,中速闪烁} else {flashRate = 1000; // 距离大于50厘米时,慢速闪烁}return flashRate;
}
led.h
#ifndef __LED_H__
#define __LED_H__#include "stm32f1xx_hal.h"void LED_Init(void);
void LED_Flash(uint32_t period);
uint32_t CalculateFlashRate(float distance);#endif // __LED_H__
三效果
led灯可以随着HC-SR04测量到的距离变化而改变闪烁的频率


相关文章:
红外超声波雷达测距
文章目录 一HC-SR04介绍1HC-SR04简介及工作原理 二用HAL库实现HC-SR04测量距离1STM32CubeMX配置2keil53代码的添加 三效果 一HC-SR04介绍 1HC-SR04简介及工作原理 超声波是振动频率高于20kHz的机械波。它具有频率高、波长短、绕射现象小、方向性好、能够成为射线而定向传播等…...

AIGC 008-IP-Adapter文本兼容图像提示适配器用于文本到图像扩散模型
AIGC 008-IP-Adapter文本兼容图像提示适配器用于文本到图像扩散模型! 文章目录 0 论文工作1 论文方法2 效果 0 论文工作 这篇论文介绍了 IP-Adapter,一种 高效地将预训练的图像到图像转换模型适应到新领域 的方法。它通过在预训练模型的 输入端 添加一个…...
Java入门基础学习笔记50——ATM系统
1、项目演示; 2、项目技术实现; 1)面向对象编程: 每个账户都是一个对象,所以要设计账户类Account,用于创建账户对象封装账户信息。ATM同样是一个对象,需要设计ATM类,代表ATM管理系…...

# linux 中使用 visudo 命令,怎么保存退出?
linux 中使用 visudo 命令,怎么保存退出? 在 visudo 中保存并退出的方法取决于您使用的文本编辑器。通常情况下,visudo 会使用 vim 或 vi 或 Nano 作为默认的文本编辑器。 1、使用 Vim 或 vi 编辑器: 按下 Esc 键退出编辑模式&…...

springboot项目,@Test写法 @Before @After
某文件示例 package cn.xxx.crm.boss;import cn.xxxx.crm.manager.mq.rabbit.AliyunCredentialsProvider; import com.rabbitmq.client.AMQP; import com.rabbitmq.client.Channel; import com.rabbitmq.client.Connection; import com.rabbitmq.client.ConnectionFactory; im…...
vue3的核心API功能:computed()API使用
常规使用方法: 这样是常规使用方法. 另一种,可写计算属性的使用方法: 这样分别定义computed的get回调函数和set回调函数, 上面例子定义了plusOne.value的值为1, 那么这时候就走了computed的set回调函数,而没有走get回调函数. 当我们打印plusOne.value的值的时候,走的是get的…...
Bootstrap5
Bootstrap5-容器 容器是Bootstrap—个基本的构建块,它包含、填充和对齐给定设备或视口中的內容。 Bootstrap 需要一个容器元素来包裏网站的内容 我们可以使用以下两个容器类: .container 类用于固定宽度并支持响应式布局的容器。.container-fluid 类用…...
宝塔部署纯Vue项目,无后端
1.打包项目 生成一个dist文件夹 2.创建云服务器根目录 3.创建站点 4.上传文件 5.访问...

spring boot3整合邮件服务实现邮件发送功能
⛰️个人主页: 蒾酒 🔥系列专栏:《spring boot实战》 目录 内容概要 开通服务 依赖引入 配置属性 创建邮件发送工具类 测试 最近发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家…...
算法刷题day54:搜索(一)
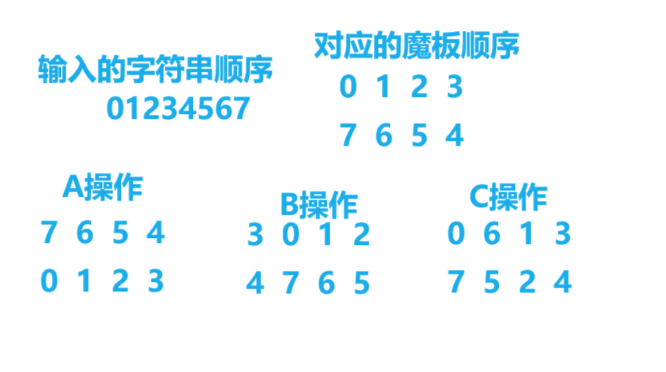
目录 引言一、池塘计数二、城堡问题三、山峰和山谷四、迷宫问题五、武士风度的牛六、抓住那头牛七、矩阵距离八、魔板 引言 针对于蓝桥杯,搜索问题还是非常之重要的,在省赛前深知暴搜的重要性,所以提前先把提高课的搜索一章给看了࿰…...

深入了解Redis的过期策略和内存淘汰机制
✨✨谢谢大家捧场,祝屏幕前的小伙伴们每天都有好运相伴左右,一定要天天开心哦!✨✨ 🎈🎈作者主页: 喔的嘛呀🎈🎈 ✨✨ 帅哥美女们,我们共同加油!一起进步&am…...

小白不知道怎么投稿?记住这个好方法
作为一名单位信息宣传员,我最初踏上这条道路时,满心憧憬着通过文字传递我们单位的精彩瞬间,让社会听见我们的声音。然而,理想与现实之间的距离,却在一次次邮箱投稿的石沉大海中渐渐清晰。那时的我,像所有“小白”一样,以为只要用心撰写稿件,通过电子邮件发给各大媒体,就能收获满…...

gRPC - Protocol Buffer 编译器安装
文章目录 Protocol Buffer 编译器安装如何安装 Protocol Buffer 编译器使用包管理器安装Linux 上,使用 apt 或 apt-get,例如:macOS 上,使用 Homebrew: 安装预编译的二进制文件(任何操作系统)其他…...

【Linux】centos7下载安装Python3.10,下载安装openssl1.1.1
目录 centos7下载安装Python(版本3.10.14) (1)网页下载python压缩包,并解压缩 (2)编译安装 Python在make altinstall时,报错及解决 (3)将安装目录和可执…...

通过 python 操作mongodb
库引入 Python 要连接 MongoDB 需要 MongoDB 驱动,这里我们使用 PyMongo 驱动来连接。 import pymongo 链接数据库 创建数据库需要使用 MongoClient 对象,并且指定连接的ip和端口号。 myclientpymongo.MongoClient("localhost",27017)#连接…...
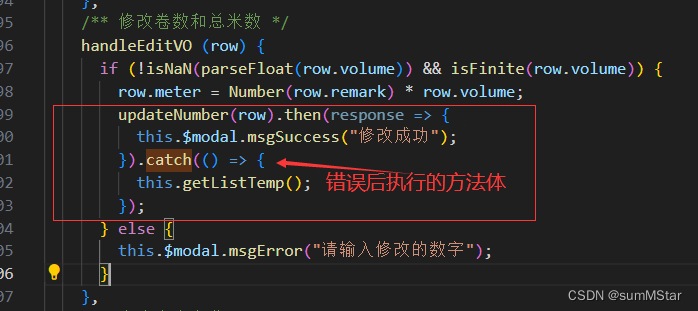
若依框架对于后端返回异常后怎么处理?
1、后端返回自定义异常serviceException 2、触发该异常后返回json数据 因为若依对请求和响应都封装了,所以根据返回值response获取不到Code值但若依提供了一个catch方法用来捕获返回异常的数据 3、处理的方法...
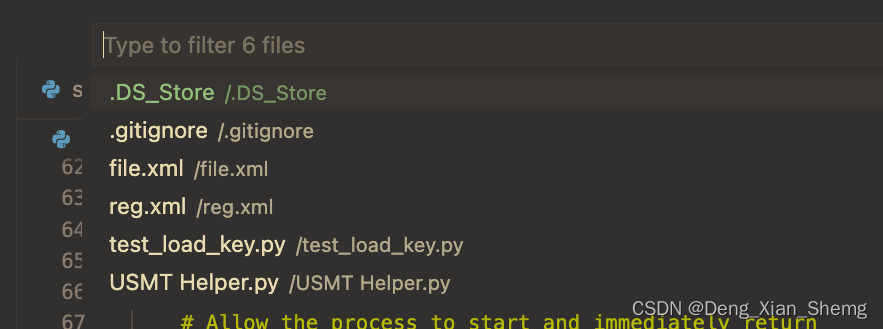
vs code怎么补全路径,怎么快捷输入文件路径
安装插件: 链接:https://marketplace.visualstudio.com/items?itemNamejakob101.RelativePath 使用 按住 Ctrl Shift H,弹出窗口,输入文件补全,回车就可以了 排除文件 如果你的项目下文件太多,它会…...

git分支开发主干合并流程
文章目录 一、分支开发二、主干合并三、删除合并过的分支 一、分支开发 创建分支git branch <分支名> # git branch my_new_branch开发后提交代码git commit -m 本次开发内容 # git commit -m 增加登录保持功能同步远端仓库git push origin <分支名> # git push o…...

01Python相关基础学习
Python基础 模块相关导入模块sys模块 模块相关 导入模块 1. import 模块名 2. import 模块名 as 别名 3. from 模块名 import 成员名 as 别名sys模块 1. sys.argv 介绍: 实现从程序的外部想程序传递参数返回的是一个列表,第一个元素是程序文件名,第二个元素是程序外部传入的…...

InTouch历史报警、历史事件按时段查询,导出
简介:本插件基于上位机组态InTouch的历史报警、操作记录而开发 适用InTouch版本:不限 适用Windows系统:不限 适用数据库:SQL Server 标记名点数:不限 配套软件安装:Excel、WPS、SQL Server 功能&…...

Play Integrity API Checker:三步快速检测你的Android设备安全完整指南 [特殊字符]
Play Integrity API Checker:三步快速检测你的Android设备安全完整指南 🔐 【免费下载链接】play-integrity-checker-app Get info about your Device Integrity through the Play Intergrity API 项目地址: https://gitcode.com/gh_mirrors/pl/play-i…...

如何用4个PHP文件搭建跨平台音乐解析API
如何用4个PHP文件搭建跨平台音乐解析API 【免费下载链接】music-api Music API 项目地址: https://gitcode.com/gh_mirrors/mu/music-api 你是否曾为音乐平台间的会员壁垒而烦恼?想开发音乐应用却苦于没有统一的接口?music-api为你提供了完美的解…...

TinyRS-R1:轻量级遥感视觉语言模型的技术解析与应用
1. TinyRS-R1:轻量级遥感视觉语言模型的技术解析 在遥感图像分析领域,视觉语言模型(Vision-Language Models, VLMs)正逐渐成为关键技术。这类模型能够同时理解图像内容和自然语言描述,为卫星和航拍图像的分析提供了全新…...

UE5.6低延迟视频推流实战:从采集编码到RTMP传输全链路解析
1. 这不是“加个插件就能播”的事:UE5.6视频流推送的真实战场 很多人看到“UE5.6推送视频流”这个标题,第一反应是:“哦,用Media Player播放本地MP4?或者接个RTMP推流插件?”——我试过,也踩过坑…...

filer.js vs 传统文件API:为什么这个类UNIX封装库能提升3倍开发效率?
filer.js vs 传统文件API:为什么这个类UNIX封装库能提升3倍开发效率? 【免费下载链接】filer.js A wrapper library for the HTML5 Filesystem API what reuses UNIX commands (cp, mv, ls) for its API. 项目地址: https://gitcode.com/gh_mirrors/fi…...

稀疏优化与Dykstra算法在模型压缩中的应用
1. 稀疏优化技术概述稀疏优化是现代机器学习模型压缩与加速的核心技术之一,其本质是通过数学方法减少模型参数数量,同时尽可能保持模型性能。在深度学习模型规模不断膨胀的今天,稀疏优化已成为解决"模型肥胖症"的关键手段。1.1 稀疏…...

从AB类到C类:拆解Doherty功放里载波与峰值支路的相位“打架”问题及宽带补偿方案
从AB类到C类:拆解Doherty功放里载波与峰值支路的相位“打架”问题及宽带补偿方案 在射频功率放大器设计中,Doherty架构因其高效率特性而备受青睐。然而,当工程师们试图将这种架构扩展到更宽频带时,往往会遇到一个令人头疼的问题—…...
)
手把手教你用AD9834 DDS模块DIY一个可调信号源(附AD原理图/PCB/程序)
从零构建AD9834 DDS可调信号源:硬件搭建与软件调优全指南 在电子设计与射频实验中,一个稳定可靠的可调信号源是不可或缺的工具。商用信号发生器往往价格昂贵,而基于AD9834 DDS模块的DIY方案,能以极低成本实现0-10MHz频率范围内的高…...

5分钟掌握BepInEx游戏插件框架:Unity模组开发的完整解决方案
5分钟掌握BepInEx游戏插件框架:Unity模组开发的完整解决方案 【免费下载链接】BepInEx Unity / XNA game patcher and plugin framework 项目地址: https://gitcode.com/GitHub_Trending/be/BepInEx BepInEx(Bepis Injector Extensible࿰…...

Linux网络编程核心:Socket、字节序与TCP/UDP实战解析
1. 从零开始理解 Linux 网络编程:Socket、字节序与地址转换如果你刚开始接触 Linux 下的网络编程,看到一堆socket、bind、connect、htonl之类的函数,还有sockaddr_in这种结构体,可能会觉得头大。别担心,这种感觉我十几…...