唐山无人机航拍,唐山无人机建模,唐山数据孪生
随着数字经济发展,各地逐渐兴起了无人机低空经济;尤其是无人机航拍,无人机建模;目前技术很成熟;比如水利部提出的数字孪生,四预的实现,都要通过无人机采集底层数据;
目前无人机建模比较成熟的机型有 大疆M3E+RTK,大疆M350 RTK等多款硬件产品,结合对应的软件实现对航拍进行建模;
当然购买相应的行业无人机是前提了,这里不再广告了;
基本流程:
1)公司申请运行许可证
2)申请空域(需要对应的飞手)
3)现场采集
4)软件处理
5)形成三维模型
数字孪生:
1)关键工程以及车间等进行工程建模,一般采用3dmax.maya,犀牛等三维软件建立
2)采集现场的数据
3)数据关联模型
预测模型:
1)针对特定场景应用预测模型,预测相应的数据;比如水资源调度模型,洪水来水模型,水库水位预测模型等进行预报;
2)通过u3d的软件,对预测进行三维预演
3)通过预测数据,进行预警,形成预案;
相关文章:

唐山无人机航拍,唐山无人机建模,唐山数据孪生
随着数字经济发展,各地逐渐兴起了无人机低空经济;尤其是无人机航拍,无人机建模;目前技术很成熟;比如水利部提出的数字孪生,四预的实现,都要通过无人机采集底层数据; 目前无人机建模…...

vue中分页查询的实现
在 Vue 中实现分页查询可以提升大型数据集的加载和显示效率。本文将逐步介绍如何使用 Vuex 状态管理和 axios HTTP 请求库来实现 Vue 分页查询。 1. 在 Vuex 中创建分页状态 首先,在 Vuex 状态管理中创建分页状态,该状态将存储每页的记录数、当前页码和…...

类 和 对象(二)
构造方法 接上篇,若每次都想下面的setDate方法给对象初始化,未免比较麻烦,那有什么方法可以让初始化更加简便呢? public void setDate(int year, int month, int day){this.year year;this.month month;this.day day;}答&#…...

buu[HCTF 2018]WarmUp(代码审计)
buu[HCTF 2018]WarmUp(代码审计) 题目 访问source.php <?phphighlight_file(__FILE__);class emmm{public static function checkFile(&$page){$whitelist ["source">"source.php","hint">"hint.php…...
)
力扣爆刷第145天之图论五连刷(dfs和bfs)
力扣爆刷第145天之图论五连刷(dfs和bfs) 文章目录 力扣爆刷第145天之图论五连刷(dfs和bfs)总结一、797. 所有可能的路径二、200. 岛屿数量三、695. 岛屿的最大面积四、1020. 飞地的数量五、130. 被围绕的区域 总结 dfs是一条路走…...

Host头攻击-使用加密和身份验证机制
使用加密和身份验证机制,即安装合适的安全工具和软件,是确保Web服务器安全性的重要步骤。这种方法涉及使用各种安全工具来检测、预防、监控和响应潜在的安全威胁。以下是对第6种方法的详细讲解,包括一些常见的安全工具和软件的示例。 1. 防火…...
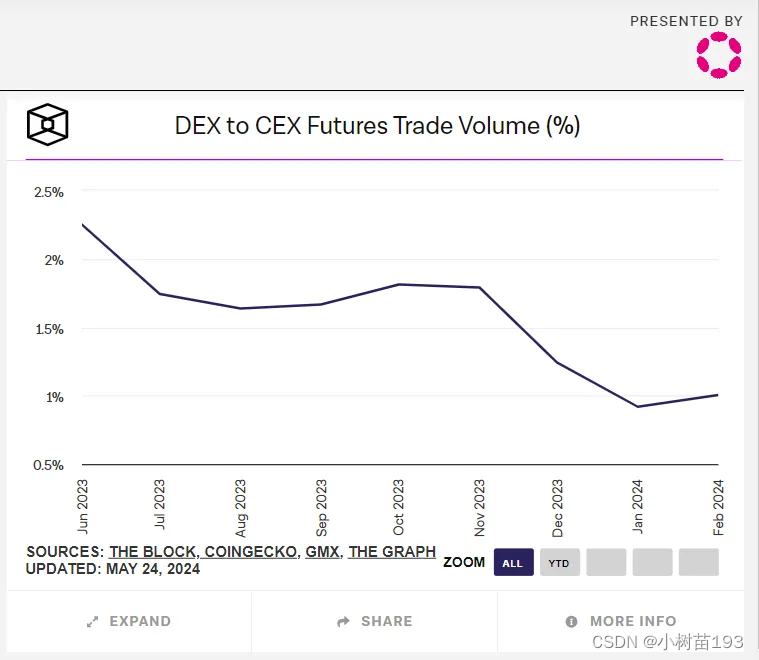
衍生品赛道的 UniSwap:SynFutures 或将成为行业领军者
经过一个周期的发展,DeFi 已经成为基于区块链构建的最成功的去中心化应用,并彻底改变了加密市场的格局。加密货币交易开始逐步从链下转移到链上,并从最初简单的 Swap 到涵盖借贷、Staking、衍生品交易等广泛的生态系统。 在 DeFi 领域&#x…...

TypeScript中的`let`、`const`、`var`区别:变量声明的规范与实践
TypeScript中的let、const、var区别:变量声明的规范与实践 引言 在TypeScript中,变量声明是代码编写的基础部分。let、const、var 是三种用于变量声明的关键字,它们各自有不同的作用域规则和可变性特点。 基础知识 作用域:变量…...
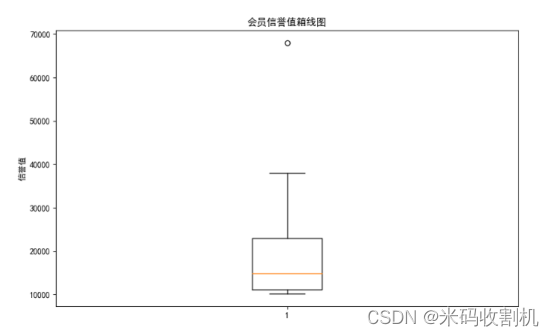
【python】python商家会员数据分析可视化(源码+数据集+课程报告论文)
👉博__主👈:米码收割机 👉技__能👈:C/Python语言 👉公众号👈:测试开发自动化【获取源码商业合作】 👉荣__誉👈:阿里云博客专家博主、5…...

Python限制输入的数范围
在Python中,我们可以使用多种方法来限制用户输入的数值范围。 1.使用while循环和try-except语句的方法 以下是一个使用while循环和try-except语句的示例,该示例将要求用户输入一个在指定范围内的整数。 假设我们要限制用户输入的数在1到100之间&#…...

postman都有哪些功能?
接口测试 可以方便地发送 HTTP 请求,包括各种方法(GET、POST、PUT、DELETE 等),并查看响应结果。 参数设置 能够灵活设置请求的参数,如查询参数、请求头、请求体等。 环境管理 支持创建不同的环境,方便…...
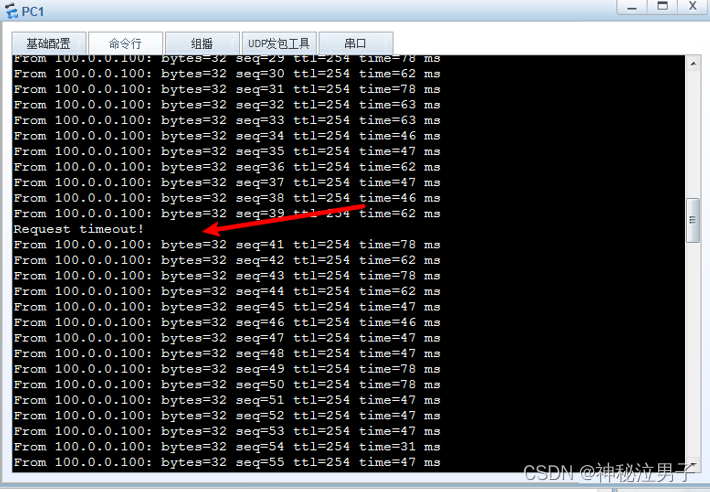
华为ensp中USG6000V防火墙双机热备VRRP+HRP原理及配置
作者主页:点击! ENSP专栏:点击! 创作时间:2024年5月6日20点26分 💯趣站推荐💯 前些天发现了一个巨牛的🤖人工智能学习网站,通俗易懂,风趣幽默,忍…...
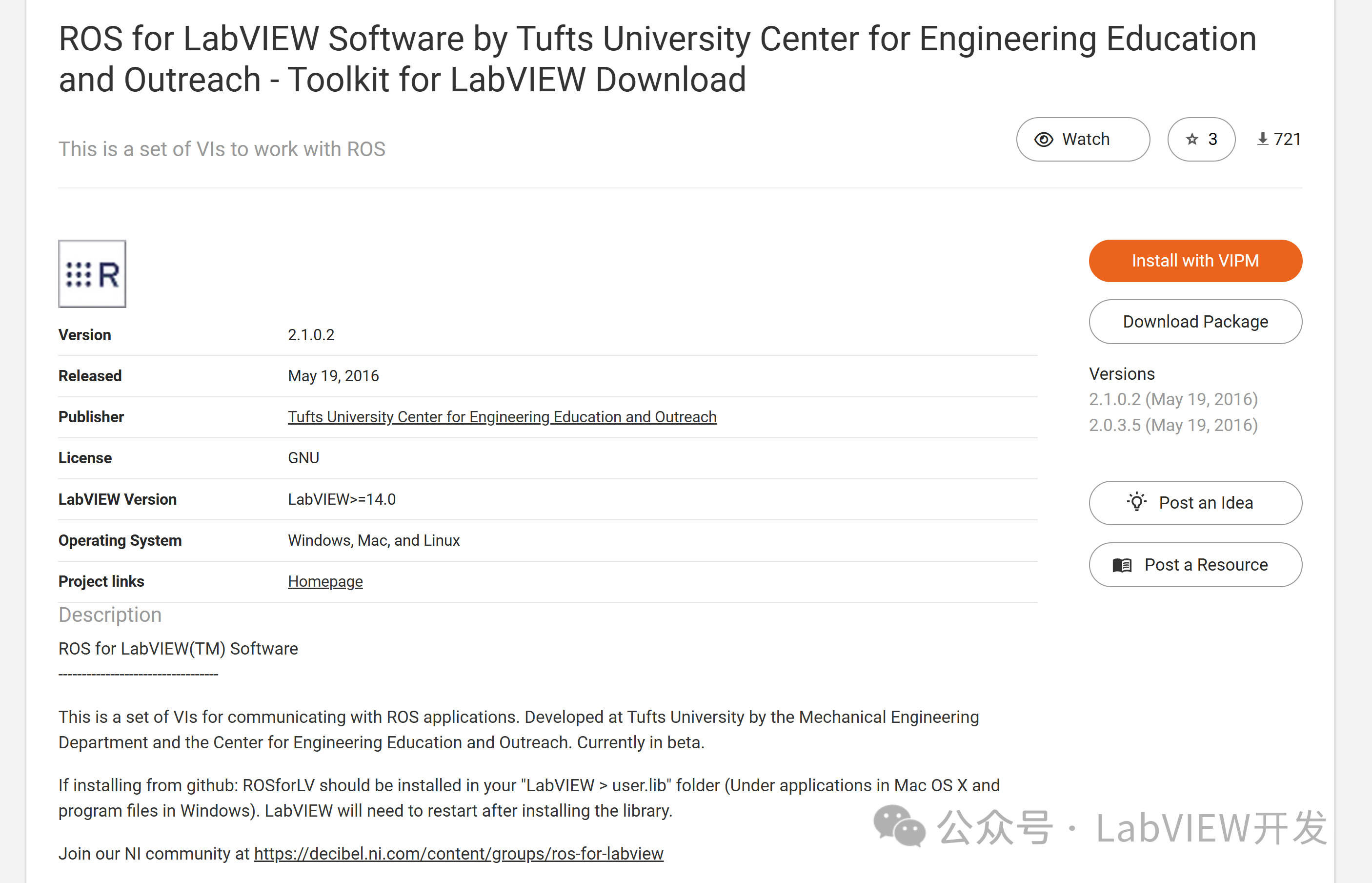
ROS for LabVIEW:实现LabVIEW与ROS的无缝集成
ROS for LabVIEW是由Tufts大学开发的一套VI集合,旨在实现LabVIEW与ROS(Robot Operating System)的无缝集成。ROS是一个灵活的机器人软件框架,而LabVIEW则是一种强大的图形化编程工具。这个工具包的推出使得LabVIEW用户能够直接与R…...
yolov8+ROS+ubuntu18.04——学习记录
参考文献 1.Ubuntu配置Yolov8环境并训练自己的数据集 ROS实时运行 2.https://juejin.cn/post/7313979467965874214 前提: 1.CUDA和Anaconda,PyTorch 2.python>3.8 一、创建激活环境,安装依赖 1.创建虚拟环境 conda create -n yol…...
|Java中的List与Set转换)
Java小抄(一)|Java中的List与Set转换
文章目录 List和Set的区别线程安全的区别相互转换List->SetSet->List List和Set的区别 在Java中,List和Set都是集合接口,它们之间有几个关键的区别: 重复元素: List允许重复元素,可以存储相同的元素多次。Set…...
)
【每日随笔】小人畏威不怀德 , 君子畏德不畏威 ( 先礼后兵 )
文章目录 一、小人畏威不怀德1、小人畏威不怀德2、小人场景一3、小人场景二 二、君子畏德不畏威三、先礼后兵 一、小人畏威不怀德 1、小人畏威不怀德 如果 友善 的对待 小人 , 这种人 认知低 且 素质差 , 小人 会将你的 " 友善 " 理解为 " 屈服 " , 他会认…...

不一样的2024
当我们继续往前走时,发现身边的事物不再那么的陌生,也不再那边多的阻碍,不管怎么,2024将会不一样。 当我们走进审批流时,全面石荒芜的,所以自己构建了一个体系。 当我们转向开源时,发现开源与…...

linux mv操作和cp操作
mv 和 cp 是 Linux 系统中用于移动和复制文件或文件夹的两个常用命令,它们之间的主要区别在于: mv(move):mv 命令用于移动文件或文件夹,将它们从一个位置移动到另一个位置。移动后,原始文件或文…...
第十二届蓝桥杯物联网试题(国赛)
不得不说国赛相比较省赛而言确实,功能变得更加复杂,更加繁琐,特别是串口LORA通信相结合的更加频繁,且对收取的字符处理要求要更加复杂,处理判别起来会更加复杂。 对于收发数据本身来说,收发的数据本身是以…...

小而美的前端库推荐
小而美,指的是“小即是美”的事物,这是马云在 2009年 APEC 中小企业峰会上首次提出的观点 👍 前端有很多小而美的库,接入成本很低又能满足日常开发需求 🎉...

异常检测实战:从面试陷阱到产线落地的20个关键问题
1. 项目概述:这不是刷题手册,而是一张通往机器学习工程现场的“通关地图”“Crack ML Interviews with Confidence: Anomaly Detection (20 Q&A)”——这个标题里藏着三个被绝大多数求职者严重低估的关键信号:Crack不是“背答案”&#x…...

Linux kernel目录、配置文件介绍
1. linux代码目录结构: kernel/ -------内核核心代码,进程调度相关模块 mm/------------内存管理子系统 fs/------------文件子系统 net/-----------不包含网络驱动的网络子系统 ipc/-----------进程间通信子系统 arch/----------体系架构相关代码 arch/…...

企业级AI Agent架构选型:Shallow、ReAct与Deep实战对比
1. 项目概述:为什么企业级AI系统必须严肃对待Agent架构选型“Choosing AI Agent Architecture for Enterprise Systems: Shallow vs ReAct vs Deep”——这个标题不是学术论文的冷门副标题,而是我过去18个月在三家不同规模企业落地AI智能体(A…...

量子计算与人工智能融合:技术原理与应用前景
1. 量子计算与人工智能融合的技术全景量子计算与人工智能(AI)的交叉领域正在重塑计算技术的边界。作为一名长期跟踪量子计算发展的技术研究者,我见证了从早期理论构想到如今实验室原型机的演进历程。量子计算利用量子比特的叠加与纠缠特性&am…...

JEECG AI应用平台深度解析:业内唯一 JAVA 版开源 AI 应用平台,如何成为企业级 Dify 替代方案
JeecgBoot AI专题研究 | JEECG AI应用平台的能力全景、对比 Dify 的差异化优势与企业落地实践 为什么企业需要一个「长在业务里」的 AI 应用平台 过去两年,几乎每家公司都在尝试把大模型接进自己的系统。最常见的路径是搭一套 Dify、FastGPT 之类的 LLM 应用平台&a…...

避坑指南:MMSegmentation自定义数据集训练时,如何解决‘xxxDataset is not in the dataset registry’等5个常见报错
MMSegmentation实战避坑:5大训练报错精准解决方案 引言 当你第一次尝试用MMSegmentation训练自定义数据集时,是否遇到过这样的场景:按照教程一步步操作,却在运行train.py时突然遭遇红色报错信息?作为计算机视觉领域最流…...

测试工程师必知的数据库知识:这4个数据库技能,测试必备
在软件开发的全生命周期中,数据库是支撑所有业务逻辑运转的核心骨架——用户的每一次点击、每一笔交易、每一条信息的展示,最终都会转化为数据库中数据的增删改查。对于软件测试工程师而言,数据库知识早已不是面试中的加分项,而是…...

HALAR® ECTFE光滑内壁:脱硫塔里,石膏垢为什么不贴它
苏福(深圳)科技有限公司 世索科HALAR ECTFE官方代理商一、脱硫塔结垢这事,运行维护的人最头疼湿法烟气脱硫(WFGD)系统里,脱硫塔内壁、除雾器、浆液循环管道,天天泡在含硫酸钙、亚硫酸钙的浆液里…...

2026这6款宝藏降AIGC平台大起底,一键把AI检测率精准控到安全区!
步入 2026 年,学术圈的风向早已不是过去那个简单的“降重”时代。随着 AI 技术的迅猛发展,论文查重系统不断升级,高校对 AI 生成内容的审查标准也愈发严苛。曾经只需关注重复率的你,现在却要面对更复杂、更隐蔽的 AIGC 检测压力。…...
)
从CRUD到AI:普通程序员转型大模型应用开发指南(收藏版)
本文针对有3-5年Java、前端或PHP开发经验的程序员,探讨了如何转型AI大模型应用开发。文章指出,虽然表面看起来与现有工作不同,但CRUD经验反而是转型优势,如API调用、业务流程理解、数据库知识和调试能力等。转型只需掌握Python基础…...