[自动驾驶技术]-1 概述技术和法规
自动驾驶(Autonomous Driving),也称为无人驾驶或自驾,是指通过计算机系统和传感器设备,自动驾驶汽车在没有人类干预的情况下能够感知环境并做出驾驶决策,从而实现车辆的自主行驶。
自动驾驶技术层级
自动驾驶技术一般分为五个等级(根据SAE International的标准):
Level 0:无自动化,人类完全控制车辆。
Level 1:驾驶辅助,如自适应巡航控制(ACC)。
Level 2:部分自动化,系统可以控制转向和加速/制动,但需要人类监控(如Tesla的Autopilot)。
Level 3:有条件的自动化,车辆在特定条件下完全控制,但需要驾驶员随时接管(如Audi的Traffic Jam Pilot)。
Level 4:高度自动化,车辆可以在多数条件下完全控制,不需要人类接管,但有限制(如Waymo的无人出租车)。
Level 5:完全自动化,车辆在所有条件下完全控制,无需人类驾驶。
| 级别 | 自动化程度 | 驾驶功能 | 驾驶操作 | 驾驶员角色 |
| L0 | 无自动化 | FCW PCW BSW LDW RCW SCW | 驾驶员控制所有操作 | 完全控制 |
| L1 | 驾驶辅助 | ACC AEB LKA LCA | 单一辅助功能(如单一横向操作转向或单一纵向操作加速/制动) | 监控和部分控制 |
| L2 | 部分自动化 | LCC TJA ICA APA AVM RPA Sumor | 同时控制转向和加速/制动 | 持续监控 |
| L3 | 有条件的自动化 | HWA NOA RPA TJP | 特定条件下完全自动驾驶,需准备接管 | 准备接管 |
| L4 |
| HWP AVP AUP CP | 特定条件下完全自动驾驶,无需干预 | 不需要干预(限定条件) |
| L5 | 完全自动化 | Full Autonomy | 所有条件下完全自动驾驶 | 无需驾驶员 |
自动驾驶核心技术
感知系统
- 传感器:包括摄像头、雷达(毫米波雷达)、激光雷达(LiDAR)、超声波传感器、GPS、IMU(惯性测量单元)等,用于感知车辆周围环境。
- 数据融合:将来自不同传感器的数据融合,生成一个完整、实时的环境模型,提高感知精度和鲁棒性。
定位与地图
- 高精度地图:包括车道信息、交通标志、信号灯位置等,精度达到厘米级,用于提供参考信息。
- 定位技术:GPS、RTK(实时动态差分定位)、视觉惯性里程计(VIO)等技术结合,实现高精度定位。
决策与规划
- 路径规划:根据高精度地图和实时环境感知,规划最优行驶路径。
- 行为决策:根据交通法规和当前环境,决定车辆的具体行为,如变道、转弯、超车等。
- 运动规划:具体实现车辆的轨迹跟踪,包括速度和方向控制,确保行驶平稳和安全。
控制系统
- 纵向控制:控制车辆的加速和减速。
- 横向控制:控制车辆的方向和转向。
- 反馈控制:基于传感器数据和预设目标,不断调整控制策略,确保车辆按照规划路径行驶。
通信系统
- 车联网(V2X):车与车(V2V)、车与基础设施(V2I)、车与网络(V2N)等通信技术,用于提高安全性和交通效率。
- 实时数据传输:车辆与云端服务器通信,实时传输和接收数据,用于更新地图、获取交通信息等。
人工智能与机器学习
- 深度学习:用于图像和视频的实时处理与分析,如物体检测、识别和分类。
- 强化学习:用于优化车辆决策和控制策略,通过模拟环境中的不断学习提高性能。
- 预测模型:基于历史数据和当前环境,预测其他道路使用者的行为,如行人、车辆等。
自动驾驶实现
环境感知
- 数据收集:通过摄像头、雷达、激光雷达等传感器收集周围环境数据。
- 数据处理:使用计算机视觉和深度学习算法处理传感器数据,识别道路、车辆、行人、交通标志等。
高精度定位
- 地图匹配:将车辆位置与高精度地图匹配,确定车辆在地图中的具体位置。
- 定位融合:结合GPS、IMU和传感器数据,实现高精度的车辆定位。
路径规划与决策
- 路径规划:根据实时环境和交通规则,规划最佳行驶路径。
- 决策制定:根据当前环境和路径规划,决定具体驾驶行为,如加速、减速、变道等。
车辆控制
- 指令发送:将决策结果转换为控制指令,发送给车辆的执行机构。
- 执行控制:车辆按照指令执行加速、制动、转向等操作。
实时监控与调整
- 反馈回路:实时监控车辆行驶状态,通过传感器数据不断调整控制策略,确保安全和舒适。
国际标准与法规
联合国欧洲经济委员会(UNECE)法规
R13: Braking
- 内容:涉及车辆的制动系统,包括自动紧急制动(AEB)等功能。
- 相关性:高度相关,规范了自动紧急制动系统的技术要求,是自动驾驶系统安全性的重要组成部分。
R79: Steering Equipment
- 内容:涉及车辆的转向系统,包括高级驾驶辅助系统(ADAS)中的转向控制。
- 相关性:高度相关,规范了车道保持辅助(LKA)、自动变道辅助(LCA)等功能,对自动驾驶系统的安全性和性能有直接影响。
R130: Lane Departure Warning System (LDWS)
- 内容:涉及车道偏离警告系统(LDWS),在车辆无意偏离车道时提醒驾驶员。
- 相关性:直接相关,LDWS是高级驾驶辅助系统的一部分,提升了车辆在自动驾驶模式下的安全性。
R131: Advanced Emergency Braking Systems (AEBS)
- 内容:涉及高级紧急制动系统(AEBS),自动检测和响应可能的碰撞。
- 相关性:直接相关,AEBS是自动驾驶和高级驾驶辅助系统的重要功能,确保在紧急情况下车辆能够自动制动。
R139: Brake Assist Systems (BAS)
- 内容:涉及制动辅助系统(BAS),在紧急情况下提供额外的制动力。
- 相关性:间接相关,虽然主要目的是提升制动效果,但对自动驾驶车辆的制动性能和安全性有支持作用。
R140: Electronic Stability Control (ESC)
- 内容:涉及电子稳定控制系统(ESC),提高车辆的稳定性和安全性。
- 相关性:间接相关,ESC系统在自动驾驶车辆中起到至关重要的安全保障作用,确保车辆在各种路况下保持稳定。
R141: Tyre Pressure Monitoring System (TPMS)
- 内容:涉及轮胎压力监测系统(TPMS),实时监测轮胎压力并提醒驾驶员。
- 相关性:间接相关,TPMS系统有助于保持车辆在最佳状态,提高自动驾驶的安全性和性能。
R151: Blind Spot Information Systems (BSIS)
- 内容:涉及盲点信息系统(BSIS),检测并警告驾驶员盲点区域的车辆。
- 相关性:直接相关,BSIS是高级驾驶辅助系统的重要组成部分,提升自动驾驶车辆的安全性。
R152: Advanced Driver Assistance Systems (ADAS)
- 内容:涉及高级驾驶辅助系统(ADAS)的各种功能,包括车道保持、自动变道等。
- 相关性:高度相关,直接规范了自动驾驶系统的各项功能,确保其安全性和可靠性。
R157: Automated Lane Keeping Systems (ALKS)
- 内容:涉及自动车道保持系统(ALKS),在特定条件下提供自动驾驶功能。
- 相关性:高度相关,是针对自动驾驶系统的具体法规,涵盖了在高速公路等特定环境下的自动驾驶功能。
R158: Driver Availability Recognition System (DARS)
- 内容:涉及驾驶员可用性识别系统,确保在需要时驾驶员能够接管控制。
- 相关性:直接相关,确保在自动驾驶系统运行期间驾驶员随时能够接管车辆,提高整体安全性。
R159: Moving Off Information System for the Detection of Pedestrians and Cyclists (MOIS)
- 内容:涉及起步信息系统,检测行人和骑行者,防止碰撞。
- 相关性:直接相关,提高自动驾驶和高级驾驶辅助系统在城市环境中的安全性。
国际标准化组织(ISO)
- ISO 26262:功能安全标准,规定了汽车电子电气系统的开发过程中的安全要求,确保自动驾驶系统的功能安全。
- ISO 21448 (SOTIF):针对意图功能安全(Safety Of The Intended Functionality),补充ISO 26262,关注非故障情况下的功能安全问题。
SAE International
SAE J3016:自动驾驶系统的分级标准,从L0(无自动化)到L5(完全自动化),用于明确自动驾驶系统的自动化程度。
SAE J2399: Criteria for Vehicle Interface Devices Used in Automatic Vehicle Guidance and Control
- 内容:该标准规定了用于自动车辆导航和控制的车辆接口设备的准则。
- 相关性:直接涉及自动驾驶系统的接口设备,是自动驾驶技术规范的一部分。
SAE J2400: Automated Vehicle Safety Framework
- 内容:该标准定义了自动驾驶系统的安全框架。
- 相关性:直接涉及自动驾驶系统的安全性,指导制定和评估自动驾驶系统的安全标准。
SAE J2808: Surface Vehicle Recommended Practice for Remote Control of Passenger Car Parking Brake Systems
- 内容:该标准规定了乘用车停车制动系统的远程控制要求。
- 相关性:间接涉及自动驾驶技术中的远程控制功能,是自动驾驶系统的一个方面。
SAE J2831: Taxonomy and Definitions for Terms Related to Shared Mobility and Enabling Technologies
- 内容:该标准定义了与共享移动和相关技术相关的术语和分类。
- 相关性:间接涉及自动驾驶技术在共享移动领域的应用,指导了相关概念和术语的统一使用。
SAE J2944: Taxonomy and Definitions for Automated and Connected Vehicle Systems
- 内容:该标准定义了自动化和连接车辆系统的术语和分类。
- 相关性:直接涉及自动驾驶和连接车辆系统的术语和分类,是自动驾驶技术标准化的一部分。
SAE J2972: Cybersecurity Guidebook for Cyber-Physical Vehicle Systems
- 内容:该标准为汽车物理系统的网络安全提供指导。
- 相关性:直接涉及自动驾驶系统的网络安全问题,指导制定和评估自动驾驶系统的网络安全策略。
SAE J2988: Cybersecurity Guidebook for Cyber-Physical Automotive Systems
- 内容:该标准为汽车物理系统的网络安全提供指导。
- 相关性:直接涉及自动驾驶系统的网络安全问题,指导制定和评估自动驾驶系统的网络安全策略。
SAE J3017: Levels of Vehicle Automation
- 内容:该标准定义了车辆自动化的级别。
- 相关性:直接涉及自动驾驶技术的分类和级别划分,是自动驾驶技术标准化的重要基础。
SAE J3018: Cybersecurity Considerations for the Automotive Onboard Vehicle Network
- 内容:该标准考虑了汽车车载网络的网络安全问题。
- 相关性:直接涉及自动驾驶系统的车载网络的网络安全问题,指导制定和评估自动驾驶系统的网络安全策略。
SAE J3045: Open Systems for Navigation
- 内容:该标准规定了导航系统的开放式标准。
- 相关性:间接涉及自动驾驶技术中的导航系统,指导制定和评估导航系统的开放式标准。
SAE J3048: Standard for Obstacle Detection and Collision Avoidance Systems Utilizing Light Detection and Ranging (LiDAR)
- 内容:该标准规定了利用激光雷达(LiDAR)的障碍物检测和碰撞回避系统的标准。
- 相关性:直接涉及自动驾驶技术中的障碍物检测和碰撞回避系统,指导制定和评估相关技术的标准。
SAE J3061: Cybersecurity Guidebook for Cyber-Physical Vehicle Systems
- 内容:提供了汽车物理系统的网络安全指导。
- 相关性:该标准为自动驾驶系统的网络安全提供了详细指导,指导制定和评估自动驾驶系统的网络安全策略。
SAE J3077: Standard for the Predictive Safety Systems Metrics for Automated Driving Systems
- 内容:该标准规定了用于自动驾驶系统的预测安全系统指标的标准。
- 相关性:直接涉及自动驾驶系统的安全性指标,是自动驾驶技术评估的一部分。
SAE J3101: Safety Assessment of Level 3, 4, and 5 Automated Driving Systems Operating on Roads
- 内容:为道路上运行的三级、四级和五级自动驾驶系统的安全评估提供指南。
- 相关性:该标准指导评估自动驾驶系统在道路上的安全性,有助于确保这些系统的安全运行。
SAE J3114: (R) Standard for Establishing Swerving Performance of Vehicle Detection and Collision Avoidance Systems
- 内容:该标准规定了车辆检测和碰撞回避系统的转向性能标准。
- 相关性:直接涉及自动驾驶技术中的车辆检测和碰撞回避系统的转向性能,指导制定和评估相关技术的标准。
SAE J3134: (R) Standard for Determining Collision Severity Using Event Data Recorders (EDRs)
- 内容:该标准规定了使用事件数据记录器(EDRs)确定碰撞严重程度的标准。
- 相关性:直接涉及自动驾驶技术中的碰撞事件数据记录和分析,是自动驾驶系统安全评估的一部分。
各国标准与法规
美国
2013年5月,美国国家公路交通安全管理局(NHTSA)为自动驾驶建立了从0级到4级的官方分类方案;对于各州指定的对新技术车辆的监管方案,NHTSA也提出了建议来辅助。联邦机动车安全标准(FMVSS):由NHTSA制定,涉及车辆安全性能的各个方面;2022年3月10日,NHTSA发布了《无人驾驶乘员保护安全标准》(Occupant Protection Safety Standards for Vehicles Without Driving Controls)的最终规则版本。
欧盟
2022年8月5日,EU 发布了Type Approval Framework Regulation,规定了自动驾驶汽车的型式认证和市场准入要求,确保其符合安全标准。
Commission Implementing Regulation (EU) 2022/1426 of 5 August 2022 laying down rules for the application of Regulation (EU) 2019/2144 of the European Parliament and of the Council as regards uniform procedures and technical specifications for the type-approval of the automated driving system (ADS) of fully automated vehicles (Text with EEA relevance) - Publications Office of the EU (europa.eu)
中国
自动驾驶道路测试管理规定:由工信部、公安部和交通运输部联合发布,规定了自动驾驶车辆在公共道路上进行测试的条件和要求。
智能网联汽车技术路线图:明确了中国智能网联汽车的发展目标和技术路线,包括自动驾驶的发展阶段和技术标准。
日本
道路运输车辆法:规定了自动驾驶车辆的安全标准和测试要求,确保其在道路上的安全运行。
自动驾驶系统的型式认证:类似于欧盟的型式认证,确保自动驾驶车辆符合特定的技术标准。
(以上法规内容,后续会针对此文进行不断更新)
相关文章:

[自动驾驶技术]-1 概述技术和法规
自动驾驶(Autonomous Driving),也称为无人驾驶或自驾,是指通过计算机系统和传感器设备,自动驾驶汽车在没有人类干预的情况下能够感知环境并做出驾驶决策,从而实现车辆的自主行驶。 自动驾驶技术层级 自动…...
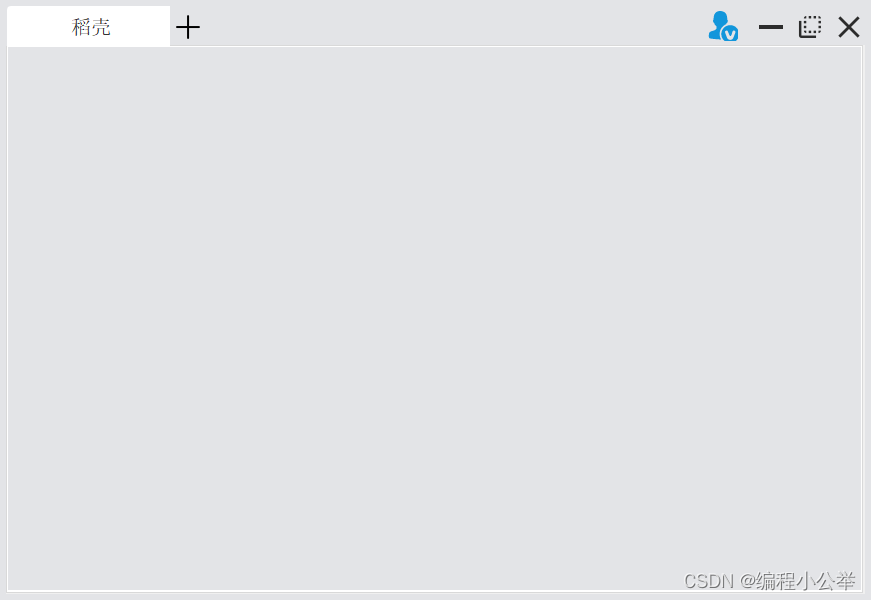
Qt自定义标题栏
效果如下: 代码如下: // widget.h #ifndef WIDGET_H #define WIDGET_H#include <QWidget>QT_BEGIN_NAMESPACE namespace Ui { class Widget; } QT_END_NAMESPACEclass Widget : public QWidget {Q_OBJECTpublic:Widget(QWidget *parent nullptr…...

java如何向数组中插入元素
java的数组是不可改变的,因此如果要向数组中插入新的元素,需要新建一个数组,新的数组元素个数减去老数组元素个数的差大于等于要插入新的元素数量。 假如说要插入一个数组元素,需要把新元素插入到中间,把新的数组分为…...

4、PHP的xml注入漏洞(xxe)
青少年ctf:PHP的XXE 1、打开网页是一个PHP版本页面 2、CTRLf搜索xml,发现2.8.0版本,含有xml漏洞 3、bp抓包 4、使用代码出发bug GET /simplexml_load_string.php HTTP/1.1 补充: <?xml version"1.0" encoding&quo…...
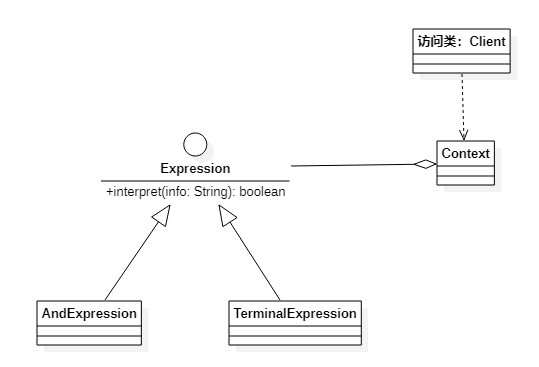
设计模式-解释器模式
作者持续关注 WPS二次开发专题系列,持续为大家带来更多有价值的WPS开发技术细节,如果能够帮助到您,请帮忙来个一键三连,更多问题请联系我(QQ:250325397) 定义 解释器模式(Interpreter Pattern&…...
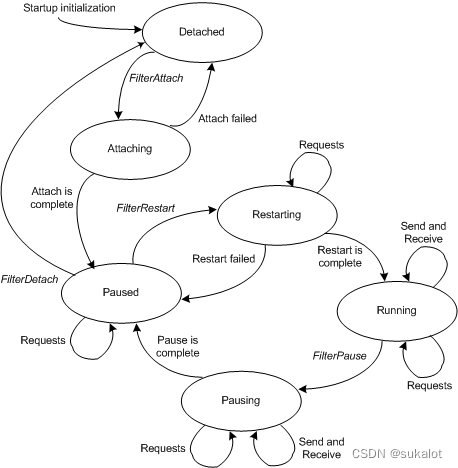
NDIS驱动程序堆栈
NDIS 6.0 引入了暂停和重启驱动程序堆栈的功能。 若要支持 NDIS 6.0 提供的堆栈管理功能,必须重写旧版驱动程序。 NDIS 6.0 还引入了 NDIS Filter驱动程序。 Filter驱动程序可以监视和修改协议驱动程序与微型端口驱动程序之间的交互。 与 NDIS 5 相比,F…...

大数据开发面试题【数仓篇】
197、数据仓库和传统数据库区别 由于历史数据使用频率过低,导致数据堆积,查询性能下降;用于查询分析,涉及大量的历史数据,数据仓库中的数据一般来日志文件和事务 数据库是跟业务挂钩的,数据库不可能装下一…...
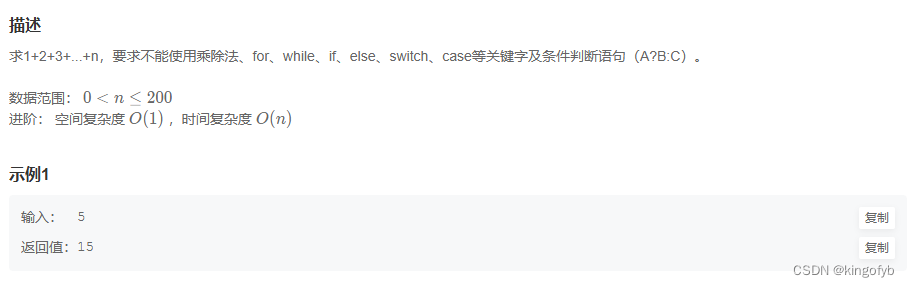
Leetcode刷题笔记5
76. 最小覆盖子串 76. 最小覆盖子串 - 力扣(LeetCode) 解法一: 暴力枚举 哈希表 先定义left和right,可以在随机位置 枚举一个位置向后找,找到一个位置之后,发现这段区间是一个最小的区间之后,…...

【Qt】Qt中的信号槽
一、信号和槽概述 信号槽是Qt矿建引以为豪的机制之一。 所谓信号槽,实际上就是观察者模式(发布——订阅模式)。当某个事件发生之后,比如,按钮检测到自己被点击了一下,它就会发出一个信号。这种发出的信号是…...

VsCode个人插件
Auto Rename Tag > 同时修改标签 Rainbow Brackets > 不同层级不同括号颜色 Dracula Official > 个人比较喜欢的一款主题 Error Lens > 错误信息显示 ES7REACT/Redux/React-Native>react开发插件 ESLINT Indenticator>方便看结构 Prettier Formatter …...
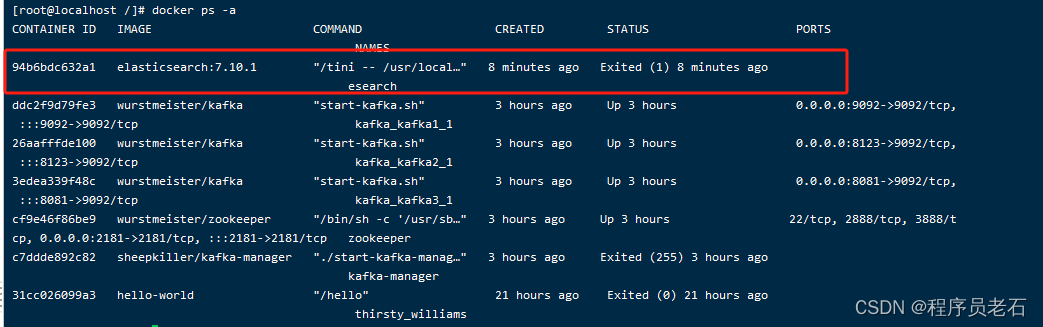
Docker环境安装并使用Elasticsearch
1、拉取es docker pull elasticsearch:7.10.12、查看镜像 docker images3、启动es docker run -d --name esearch -p 9200:9200 -p 9300:9300 elasticsearch:7.10.14、如果启动ES时出现一下问题 Unable to find image docker.elastic.co/elasticsearch/elasticsearch:7.10.…...
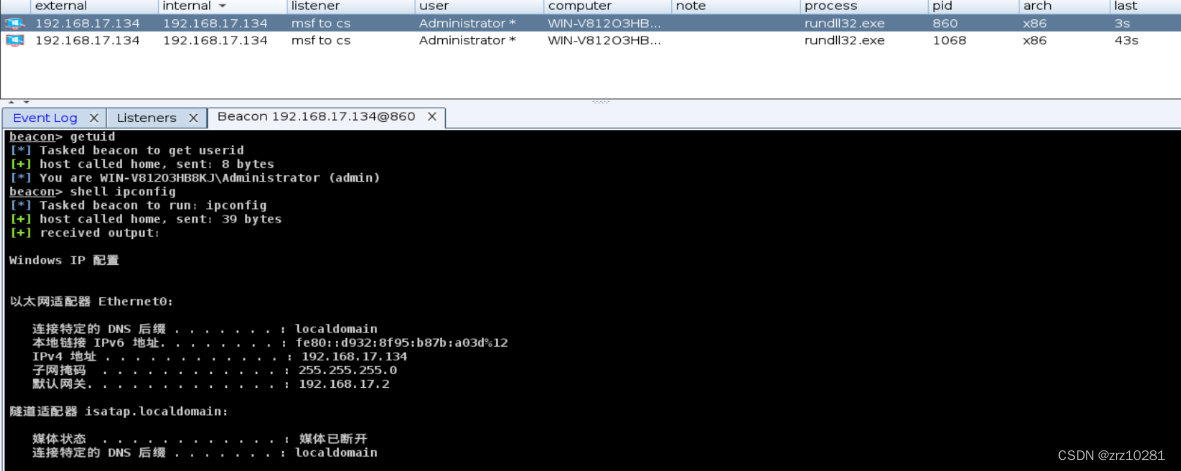
中心渗透Ⅱ
cs与msf权限传递以及mimikatz抓取win2012明文密码 使用Cobalt Strike抓取win2012明文密码,将会话传递到Metasploit Framework上 1.cs生成木马并使目标服务器中马 建立监听生成木马 2.抓取目标主机的明文密码 通过修改注册表来让Wdigest Auth保存明文口令 shell …...
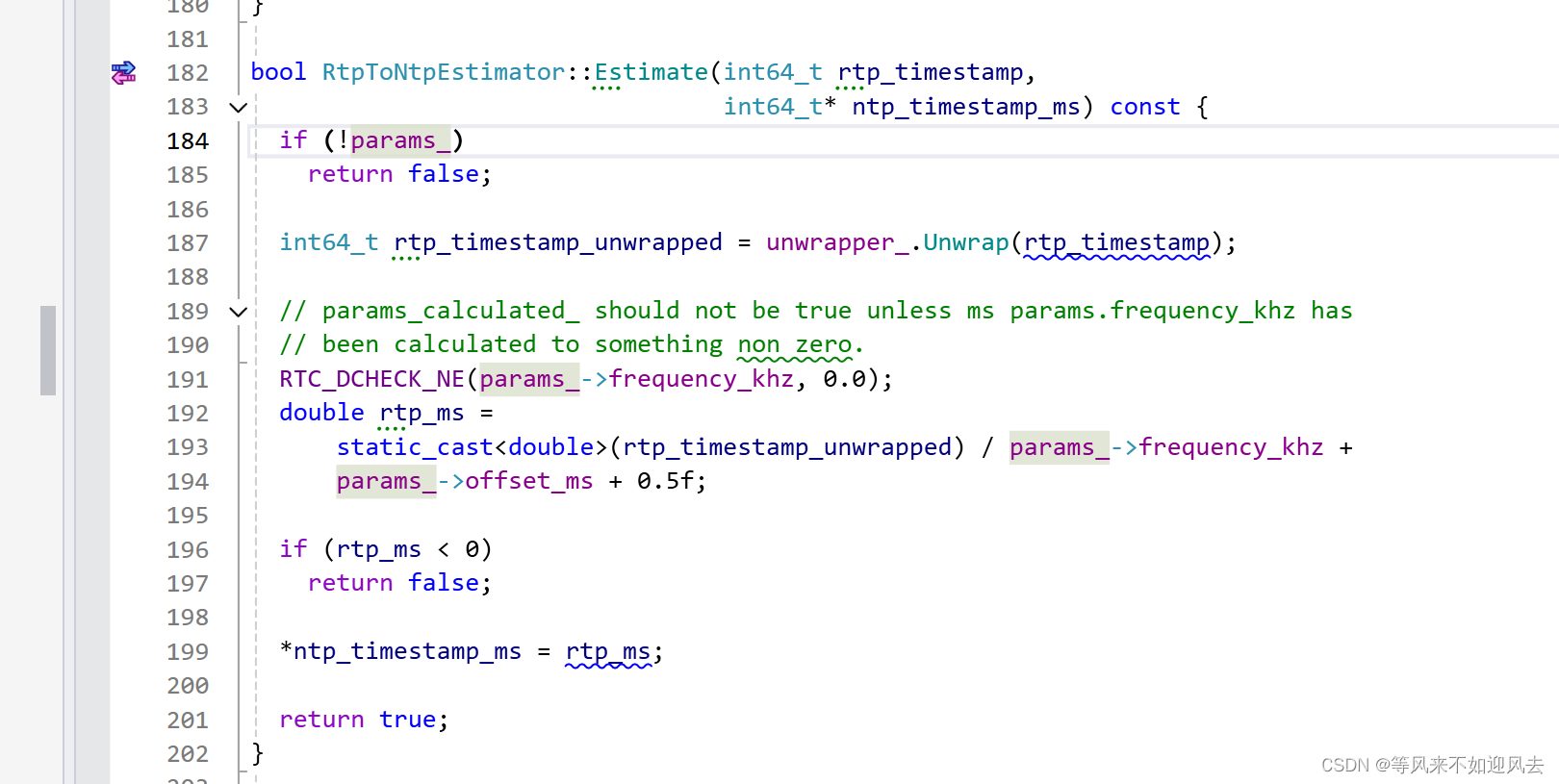
【webrtc】RtpToNtpEstimator:最小二乘法、ntp估计及c++实例
上一篇: 【webrtc】RtpToNtpEstimator:将 RTP 时间戳映射到 NTP 时间 分析了最小二乘法的实现及对rtp到ntp的映射计算的调用流程 基于最小二乘法进行估计 RtpToNtpEstimator::Estimate G:\CDN\rtcCli\m98\src\system_wrappers\source\rtp_to_ntp_estimator.cc RtpToNtpEstima…...
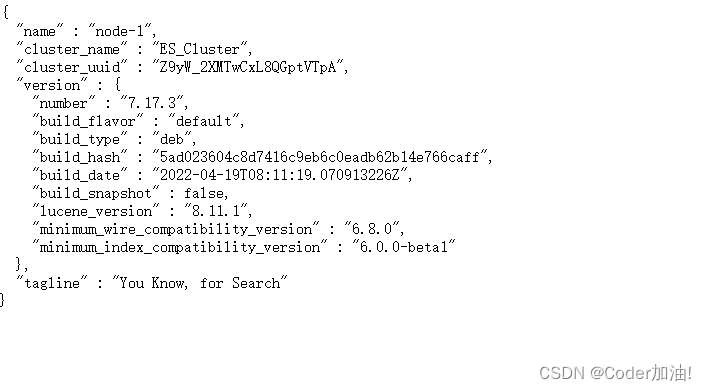
【DevOps】Elasticsearch在Ubuntu 20.04上的安装与配置:详细指南
目录 一、ES 简介 1、核心概念 2、工作原理 3、 优势 二、ES 在 Ubuntu 20.04 上的安装 1、安装 Java 2、下载 ES 安装包 3、创建 ES 用户 4 、解压安装包 5、 配置 ES 6、 启动 ES 7、验证安装 三、ES 常用命令 1、创建索引 2、 插入文档 3、查询文档 四、ES…...
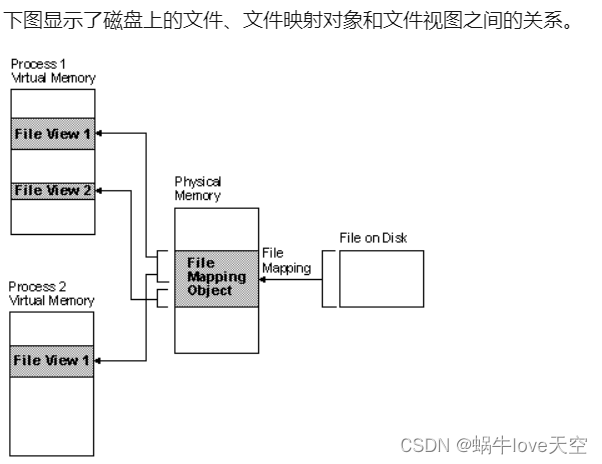
windows内存管理
一 windows系统的内存管理涉及哪些 1.1 虚拟内存管理机制 windows操作系统使用虚拟内存技术,将磁盘文件,通过映射对象(存储在物理内存)关联,映射到虚拟内存作为文件试图。即用户操作"虚拟内存中File View Objec…...
c++ 将指针转换为 void* 后,转换为怎么判断原指针类型?
当将指针转换为void后,擦除了指针所指向对象的类型信息,因此无法通过void指针来判断原始指针的类型。我这里有一套编程入门教程,不仅包含了详细的视频讲解,项目实战。如果你渴望学习编程,不妨点个关注,给个…...

Swift 属性
属性 一、存储属性1、常量结构体实例的存储属性2、延时加载存储属性3、存储属性和实例变量 二、计算属性1、简化 Setter 声明2、简化 Getter 声明3、只读计算属性 三、属性观察器四、属性包装器1、设置被包装属性的初始值2、从属性包装器中呈现一个值 五、全局变量和局部变量六…...

基于maxkey接入jeecgboot并实现账户同步
1. 注册应用 1.1 在统一认证中心注册第三方应用 1.1.1 填写应用名和登录地址 1.1.2 填写认证地址授权方式和作用域 1.1.3 选择权限范围并提交 1.2 配置访问权限 1.2.1 指定用户组 1.1.2 选择注册的应用 1.1.3 在单点登录认证页面查看添加的应用 1.3 同步一个第三方应用的账号…...

kafka Kerberos集群环境部署验证
背景 公司需要对kafka环境进行安全验证,目前考虑到的方案有Kerberos和SSL和SASL_SSL,最终考虑到安全和功能的丰富度,我们最终选择了SASL_SSL方案。处于知识积累的角度,记录一下kafka keberos安装部署的步骤。 机器规划 目前测试环境公搭建了三台kafka主机服务,现在将详细…...
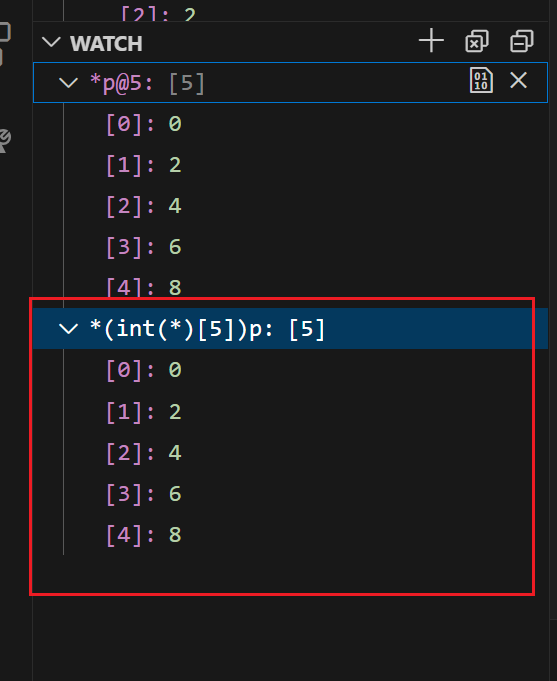
[C++]debug介绍+debug时如何查看指针指向内存处的值
一、简介 预备工具和知识:使用使用VSCode使用Debug。 本文简介:本文将简要介绍debug中Continue,Step Over,Step Into和Restart的功能。并介绍如何在debug时查看动态内存地址(指针)的值; 二、D…...

【下载安装教程】仿宋GB2312、楷体GB2312和方正小标宋简体办公字体安装包下载安装教程
常用办公字体安装与使用指南 适用字体及场景 字体名称适用场景仿宋_GB2312正文内容、正式文档楷体_GB2312批注、说明性文字方正小标宋简体标题、封面文字、强调性内容 支持软件 WPSMicrosoft WordPowerPoint其他主流办公软件 使用方法 安装字体 下载字体文件(.…...
)
DeepSeek服务网格选型决策树(Istio vs. eBPF轻量方案深度对比:延迟压降42%、资源开销降低68%实测数据)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek微服务架构建议 在构建面向大语言模型推理与训练任务的微服务系统时,DeepSeek系列模型对计算密集型服务、高吞吐API网关及弹性资源编排提出了明确要求。推荐采用分层解耦、异步协同…...

抖音下载终极指南:免费无水印批量保存完整方案
抖音下载终极指南:免费无水印批量保存完整方案 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support. 抖音…...
MindSpore Transformers 训练任务快速上手
MindSpore Transformers(简称 MindFormers)是昇思 MindSpore 生态下的大模型训练套件,集成 BERT、GPT、LLaMA、Qwen 等主流 Transformer 模型,提供一键式预训练 / 微调、分布式并行、混合精度、监控可视化能力,适配昇腾…...

Wot Design Uni 文件上传组件:如何实现异步上传的强大功能
Wot Design Uni 文件上传组件:如何实现异步上传的强大功能 【免费下载链接】wot-design-uni 一个基于Vue3TS开发的uni-app组件库,提供70高质量组件,支持暗黑模式、国际化和自定义主题。 项目地址: https://gitcode.com/gh_mirrors/wo/wot-d…...

服务通信模式选择完全指南
服务通信模式选择完全指南 前言 在微服务架构中,服务间通信是核心基础设施之一。选择合适的通信模式直接影响系统的性能、可靠性和可维护性。本文将详细介绍同步通信和异步通信的各种模式,以及如何根据业务场景做出最佳选择。 一、服务通信概述 1.1 通信…...

LLM语言大模型的企业应用案例
本文系统梳理 2025-2026 年国内外 7 款主流大语言模型(LLM)在企业中的成功部署案例,覆盖金融、汽车、旅游、政务、医疗五大行业,每个案例均包含部署步骤、数据准备、改善效果数字及经验教训,为企业 AI 落地提供可借鉴的…...

XCOM 2模组管理器终极指南:为什么AML是你的最佳选择?
XCOM 2模组管理器终极指南:为什么AML是你的最佳选择? 【免费下载链接】xcom2-launcher The Alternative Mod Launcher (AML) is a replacement for the default game launchers from XCOM 2 and XCOM Chimera Squad. 项目地址: https://gitcode.com/gh…...

CircuitJS1 Desktop Mod终极指南:开启离线电路仿真新纪元
CircuitJS1 Desktop Mod终极指南:开启离线电路仿真新纪元 【免费下载链接】circuitjs1 Standalone (offline) version of the Circuit Simulator with small modifications based on modified NW.js. 项目地址: https://gitcode.com/gh_mirrors/circ/circuitjs1 …...

魔兽争霸3现代化修复指南:3步解决经典游戏兼容性问题
魔兽争霸3现代化修复指南:3步解决经典游戏兼容性问题 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 你是否还记得那个曾经风靡全球的《魔…...