强化学习学习笔记-李宏毅
Policy Gradient
- actor+env+reward function,env和reward是不能控制的,唯一可以变的是actor,Policy π \pi π是一个网络,参数为 θ \theta θ,输入是当前的观察,输出是采取的行为,例如游戏中输入的是游戏画面 s 1 s_1 s1,输出的是采取的操作 a 1 a_1 a1,有了决定的action a 1 a_1 a1之后会获取对应的reward r 1 r_1 r1,并且画面也会有对应的改变得到 s 2 s_2 s2,这个过程不断进行得到一个trajectory τ = { s 1 , a 1 , s 2 , a 2 , ⋯ , s T , a T } \tau = \{s_1,a_1,s_2,a_2,\cdots,s_T,a_T\} τ={s1,a1,s2,a2,⋯,sT,aT},假设网络参数固定,那么某条trajectory的几率是 p θ ( τ ) = p ( s 1 ) p θ ( a 1 ∣ s 1 ) p ( s 2 ∣ s 1 , a 1 ) p θ ( a 2 ∣ s 2 ) ⋯ = p ( s 1 ) ∏ t = 1 T p θ ( a t ∣ s t ) p ( s t + 1 ∣ s t , a t ) p_\theta(\tau) = p(s_1)p_\theta(a_1|s_1)p(s_2|s_1,a_1)p_\theta(a_2|s_2)\cdots = p(s_1)\prod_{t = 1}^Tp_\theta(a_t|s_t)p(s_{t+1}|s_t,a_t) pθ(τ)=p(s1)pθ(a1∣s1)p(s2∣s1,a1)pθ(a2∣s2)⋯=p(s1)∏t=1Tpθ(at∣st)p(st+1∣st,at),某一条trajectory得到的reward R ( τ ) = ∑ t = 1 T r t R(\tau)=\sum_{t = 1}^Tr_t R(τ)=∑t=1Trt,目标就是调整网络参数,使得reward的期望值大 R ‾ θ = ∑ τ R ( τ ) p θ ( τ ) \overline{R}_\theta = \sum_\tau R(\tau)p_\theta(\tau) Rθ=∑τR(τ)pθ(τ),如何优化 θ \theta θ呢,梯度下降 ∇ ( ‾ R ) θ = ∑ τ R ( τ ) ∇ p θ ( τ ) = ∑ τ R ( τ ) p θ ( τ ) ∇ p θ ( τ ) p θ ( τ ) = ∑ τ R ( τ ) p θ ( τ ) ∇ log p θ ( τ ) = E τ ∼ p θ ( τ ) [ R ( τ ) ∇ log p θ ( τ ) ] = 1 N ∑ n = 1 N R ( τ n ) ∇ log p θ ( τ n ) = 1 N ∑ n = 1 N ∑ t = 1 T n R ( τ n ) ∇ log p θ ( a t n ∣ s t n ) \nabla \overline(R)_\theta=\sum_\tau R(\tau)\nabla p_\theta(\tau) = \sum_\tau R(\tau)p_\theta(\tau)\frac{\nabla p_\theta(\tau)}{p_\theta(\tau)}=\sum_\tau R(\tau)p_\theta(\tau)\nabla \log p_\theta(\tau) = E_{\tau\sim p_\theta(\tau)}[R(\tau)\nabla\log p_\theta(\tau)] = \frac{1}{N}\sum_{n = 1}^NR(\tau^n)\nabla\log p_\theta(\tau^n) = \frac{1}{N}\sum_{n = 1}^N\sum_{t = 1}^{T_n}R(\tau^n)\nabla\log p_\theta(a^n_t|s_t^n) ∇(R)θ=∑τR(τ)∇pθ(τ)=∑τR(τ)pθ(τ)pθ(τ)∇pθ(τ)=∑τR(τ)pθ(τ)∇logpθ(τ)=Eτ∼pθ(τ)[R(τ)∇logpθ(τ)]=N1∑n=1NR(τn)∇logpθ(τn)=N1∑n=1N∑t=1TnR(τn)∇logpθ(atn∣stn),更新参数 θ ← θ + η ∇ R ‾ θ \theta\leftarrow \theta + \eta\nabla \overline{R}_\theta θ←θ+η∇Rθ,训练数据的获得,根据当前的网络,去玩游戏获取不同的trajectory,记录 s i t , a i t , r i s^t_i,a^t_i,r_i sit,ait,ri的数据对,计算梯度,更新参数,之后再次sample trajectory;
- 本质上可以看做一个分类问题,网络希望输入 s i t s_i^t sit输出 a i t a_i^t ait使得reward r i r_i ri最大,其中 r i r_i ri是针对整场游戏而言的,所以可以看做以reward为权重的log likelihood,希望加权的likelihood越大越好,以此提升输入 s i t s_i^t sit得到reward大的时候对应的 a i t a_i^t ait的几率,对应的就是分类的时候提升正确类别对应的几率;
- 由于训练的时候是sample,所以假设所有的reward都为正的时候可能会存在问题,所以reward整体都减去一个常量,可以取作reward的期望;
- 现在reward是trajectory粒度的,但是一条trajectory里面可能并不是所有的action都是好的,所以需要为不同的步骤分配不同的credit,此时变为 R ( τ n ) → ∑ t ′ = t T n r t ′ n → ∑ t ′ = t T n γ t ′ − t r t ′ n (随时间指数) R(\tau^n)\rightarrow \sum_{t'=t}^{T_n}r_{t'}^n\rightarrow\sum_{t'=t}^{T_n}\gamma^{t'-t}r_{t'}^n(随时间指数) R(τn)→∑t′=tTnrt′n→∑t′=tTnγt′−trt′n(随时间指数),减去bias之后记作 A θ ( s t , a t ) A^\theta(s_t,a_t) Aθ(st,at);
Proximal Policy Optimization
- On-policy:参与学习的agent和与环境互动的agent是同一个,上面的就是on-policy的做法,存在的问题就是更新了参数之后,之前sample出来的数据就不能再次使用了;
- Off-policy:参与学习的agent和与环境互动的agent不是同一个,希望使用sample出来的数据多次,使用从 π θ ′ \pi_{\theta'} πθ′中sample出来的数据来训练 π θ \pi_\theta πθ,其中 θ ′ \theta' θ′是固定的;
- importance sampling: E x ∼ p [ f ( x ) ] = 1 N ∑ i = 1 N f ( x i ) E_{x\sim p}[f(x)] = \frac{1}{N}\sum_{i = 1}^Nf(x^i) Ex∼p[f(x)]=N1∑i=1Nf(xi),但是我们现在不能从 p p p sample数据,只能从 q ( x ) q(x) q(x) sample数据,所以换成 E x ∼ p [ f ( x ) ] = ∫ f ( x ) p ( x ) d x = ∫ f ( x ) p ( x ) q ( x ) q ( x ) d x = E x ∼ q [ f ( x ) p ( x ) q ( x ) ] E_{x\sim p}[f(x)] = \int f(x)p(x)dx = \int f(x)\frac{p(x)}{q(x)}q(x)dx = E_{x\sim q}[f(x)\frac{p(x)}{q(x)}] Ex∼p[f(x)]=∫f(x)p(x)dx=∫f(x)q(x)p(x)q(x)dx=Ex∼q[f(x)q(x)p(x)],也就是做了一个修正,乘上了 p ( x ) q ( x ) \frac{p(x)}{q(x)} q(x)p(x),也就是importance weight,但是importance sampling有一个问题就是 p p p和 q q q不能差太多;
- 对应的梯度 ∇ R ‾ θ = E τ ∼ p θ ′ ( τ ) [ p θ ( τ ) p θ ′ ( τ ) R ( τ ) ∇ log p θ ( τ ) ] = E ( s t , a t ) ∼ π θ ′ [ P θ ( s t , a t ) P θ ′ ( s t , a t ) A θ ′ ( s t , a t ) ∇ log p θ ( a t n ∣ s t n ) ] = E ( s t , a t ) ∼ π θ ′ [ P θ ( a t ∣ s t ) P θ ′ ( a t ∣ s t ) p θ ( s t ) p θ ′ ( s t ) A θ ′ ( s t , a t ) ∇ log p θ ( a t n ∣ s t n ) ] = E ( s t , a t ) ∼ π θ ′ [ P θ ( a t ∣ s t ) P θ ′ ( a t ∣ s t ) A θ ′ ( s t , a t ) ∇ log p θ ( a t n ∣ s t n ) ] \nabla \overline R_\theta = E_{\tau\sim p_{\theta'}(\tau)}[\frac{p_\theta(\tau)}{p_{\theta'}(\tau)}R(\tau)\nabla\log p_\theta(\tau)]=E_{(s_t,a_t)\sim\pi_{\theta'}}[\frac{P_\theta(s_t,a_t)}{P_{\theta'}(s_t,a_t)}A^{\theta'}(s_t,a_t)\nabla\log p_\theta(a_t^n|s_t^n)]=E_{(s_t,a_t)\sim\pi_{\theta'}}[\frac{P_\theta(a_t|s_t)}{P_{\theta'}(a_t|s_t)}\frac{p_\theta(s_t)}{p_{\theta'}(s_t)}A^{\theta'}(s_t,a_t)\nabla\log p_\theta(a_t^n|s_t^n)]=E_{(s_t,a_t)\sim\pi_{\theta'}}[\frac{P_\theta(a_t|s_t)}{P_{\theta'}(a_t|s_t)}A^{\theta'}(s_t,a_t)\nabla\log p_\theta(a_t^n|s_t^n)] ∇Rθ=Eτ∼pθ′(τ)[pθ′(τ)pθ(τ)R(τ)∇logpθ(τ)]=E(st,at)∼πθ′[Pθ′(st,at)Pθ(st,at)Aθ′(st,at)∇logpθ(atn∣stn)]=E(st,at)∼πθ′[Pθ′(at∣st)Pθ(at∣st)pθ′(st)pθ(st)Aθ′(st,at)∇logpθ(atn∣stn)]=E(st,at)∼πθ′[Pθ′(at∣st)Pθ(at∣st)Aθ′(st,at)∇logpθ(atn∣stn)],根据 ∇ f ( x ) = f ( x ) ∇ log f ( x ) \nabla f(x) = f(x)\nabla\log f(x) ∇f(x)=f(x)∇logf(x)反推出原优化目标为 J θ ′ ( θ ) = E ( s t , a t ) ∼ π θ ′ [ P θ ( a t ∣ s t ) P θ ′ ( a t ∣ s t ) A θ ′ ( s t , a t ) ] J^{\theta'}(\theta) =E_{(s_t,a_t)\sim\pi_{\theta'}}[\frac{P_\theta(a_t|s_t)}{P_{\theta'}(a_t|s_t)}A^{\theta'}(s_t,a_t)] Jθ′(θ)=E(st,at)∼πθ′[Pθ′(at∣st)Pθ(at∣st)Aθ′(st,at)];
- PPO就是加了一项使得 p θ p_\theta pθ和 p θ ′ p_{\theta'} pθ′之间不能差太多, J P P O θ ′ ( θ ) = J θ ′ ( θ ) − β K L ( θ , θ ′ ) J^{\theta'}_{PPO}(\theta) = J^{\theta'}(\theta)-\beta KL(\theta,\theta') JPPOθ′(θ)=Jθ′(θ)−βKL(θ,θ′),其中 β \beta β动态调整,如果 K L ( θ , θ ′ ) > K L m a x KL(\theta,\theta')>KL_{max} KL(θ,θ′)>KLmax增大 b e t a beta beta,如果 K L ( θ , θ ′ ) < K L m i n KL(\theta,\theta')<KL_{min} KL(θ,θ′)<KLmin减小 b e t a beta beta;
ref
https://www.youtube.com/watch?v=OAKAZhFmYoI&ab_channel=Hung-yiLee
相关文章:

强化学习学习笔记-李宏毅
Policy Gradient actorenvreward function,env和reward是不能控制的,唯一可以变的是actor,Policy π \pi π是一个网络,参数为 θ \theta θ,输入是当前的观察,输出是采取的行为,例如游戏中输…...
吴恩达深度学习笔记:超 参 数 调 试 、 Batch 正 则 化 和 程 序 框 架(Hyperparameter tuning)3.8-3.9
目录 第二门课: 改善深层神经网络:超参数调试、正 则 化 以 及 优 化 (Improving Deep Neural Networks:Hyperparameter tuning, Regularization and Optimization)第三周: 超 参 数 调 试 、 Batch 正 则 化 和 程 序 框 架(Hyperparameter …...
SQL 语言:数据控制
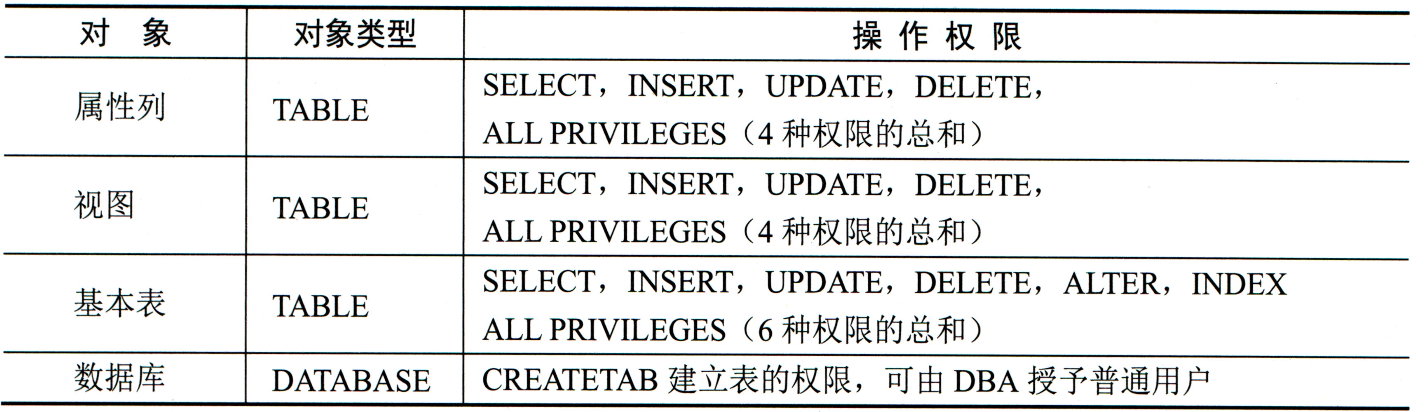
文章目录 概述授权(GRANT)销权(REVOKE)总结 概述 SQL语言中的数据控制权限分配是数据库管理的重要组成部分,它涉及到如何合理地为用户分配对数据库资源的访问和使用权限。 权限类型:在SQL中,权限主要分为…...
『ZJUBCA Weekly Feed 07』MEV | AO超并行计算机 | Eigen layer AVS生态
一文读懂MEV:区块链的黑暗森林法则 01 💡TL;DR 这篇文章介绍了区块链中的最大可提取价值(MEV)概念,MEV 让矿工和验证者通过抢先交易、尾随交易和三明治攻击等手段获利,但也导致网络拥堵和交易费用增加。为了…...

正点原子延时函数delay_ms延时失效的原因
1、问题陈述 今天在测试小车程序的时候使用了如下代码,发现延时并没有达到期望的4s,而是仅仅延时了0.4s左右,本来以为少加了个0,最后在我多次测试下来,发现在延时大约超过2s的时候就会失效。 while(1){Set_Pwm(6000,60…...

MySQL 满足条件函数中使用查询最大值函数
在实际的数据库操作中,我们常常需要根据某些条件找到最大值并据此进行下一步的操作。例如,在一个包含订单信息的表中,可能需要找到特定客户的最大订单金额,并据此进行某些统计或决策。MySQL 提供了多种函数和查询方法,…...
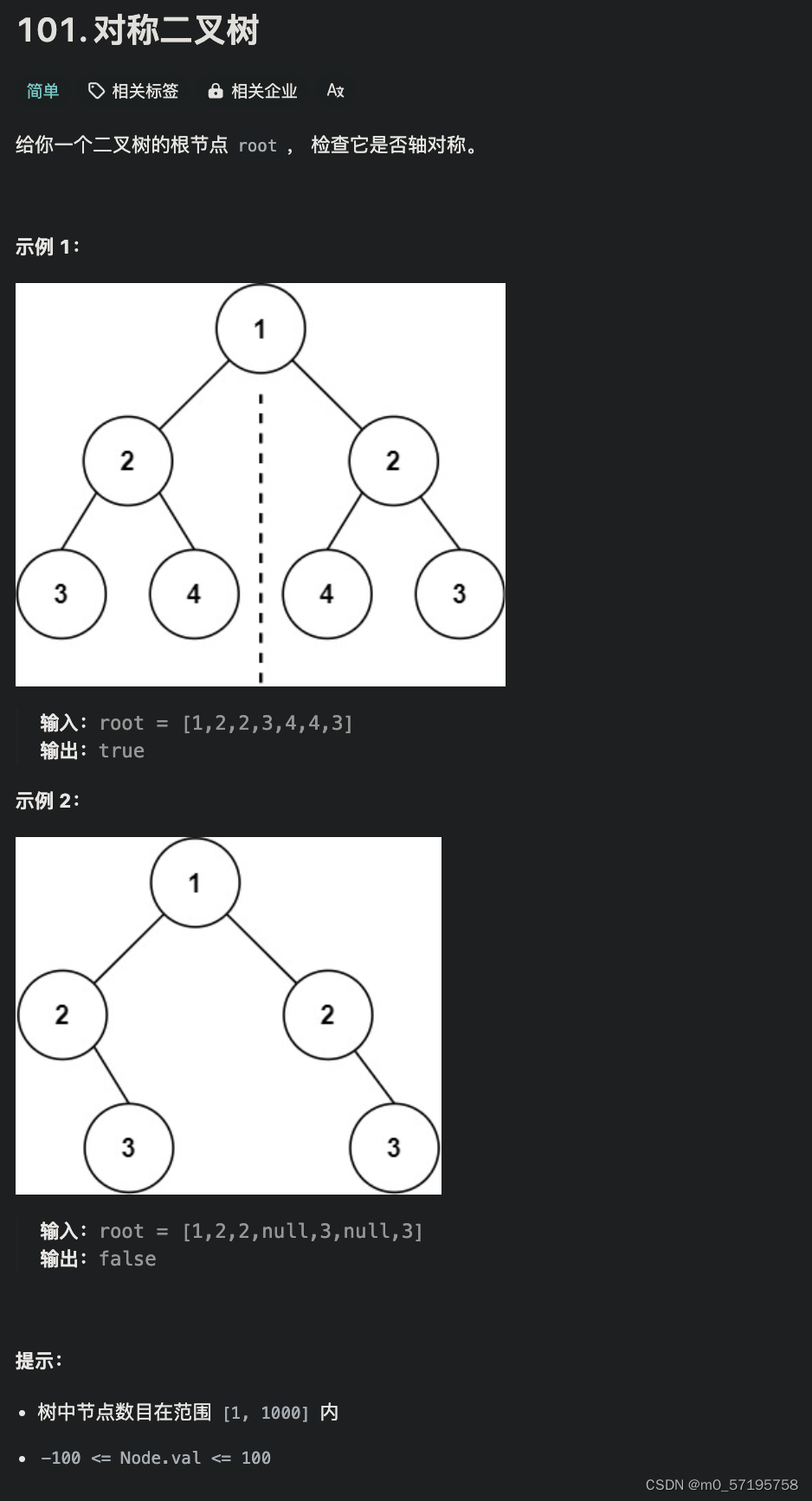
Java | Leetcode Java题解之第101题对称二叉树
题目: 题解: class Solution {public boolean isSymmetric(TreeNode root) {return check(root, root);}public boolean check(TreeNode u, TreeNode v) {Queue<TreeNode> q new LinkedList<TreeNode>();q.offer(u);q.offer(v);while (!q.…...

【区块链】智能合约漏洞测试
打开Ganache vscode打开智能合约漏洞工程 合约内容 pragma solidity >0.8.3;contract EtherStore {mapping(address > uint) public balances;function deposit() public payable {balances[msg.sender] msg.value;emit Balance(balances[msg.sender]);}function with…...
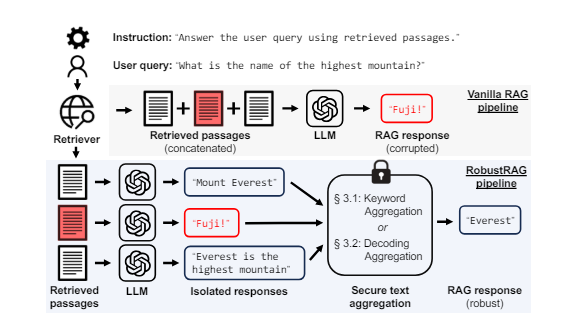
大模型主流 RAG 框架TOP10
节前,我们组织了一场算法岗技术&面试讨论会,邀请了一些互联网大厂朋友、今年参加社招和校招面试的同学。 针对大模型技术趋势、大模型落地项目经验分享、新手如何入门算法岗、该如何准备面试攻略、面试常考点等热门话题进行了深入的讨论。 总结链接…...

第八次javaweb作业
我们小组课程设计的题目是:超市管理系统,我认领的模块是:商品信息管理 controller package com.example.supermarker.controller;import com.example.supermarker.pojo.MerchInfo; import com.example.supermarker.pojo.PageBean; import c…...
)
js积累四 (读json文件)
function ReadRadioJson() {var url "../radio.json" //json文件url,本地的就写本地的位置,如果是服务器的就写服务器的路径var request new XMLHttpRequest();request.open("get", url, false); //设置请求方法与路径request.sen…...

关于我转生从零开始学C++这件事:升级Lv.25
❀❀❀ 文章由不准备秃的大伟原创 ❀❀❀ ♪♪♪ 若有转载,请联系博主哦~ ♪♪♪ ❤❤❤ 致力学好编程的宝藏博主,代码兴国!❤❤❤ OK了老铁们,又是一个周末,大伟又来继续给大家更新我们的C的内容了。那么根据上一篇博…...

mysql中text,longtext,mediumtext区别
文章目录 一.概览二、字节限制不同三、I/O 不同四、行迁移不同 一.概览 在 MySQL 中,text、mediumtext 和 longtext 都是用来存储大量文本数据的数据类型。 TEXT:TEXT 数据类型可以用来存储最大长度为 65,535(2^16-1)个字符的文本数据。如果存储的数据…...
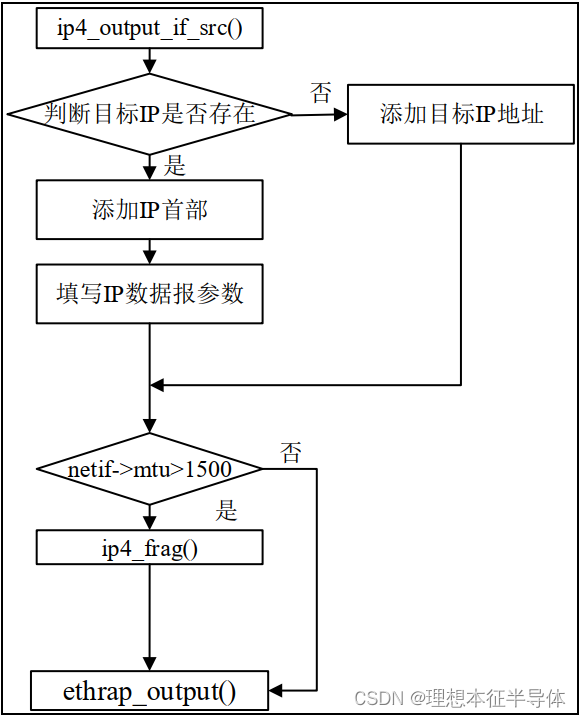
IP协议说明
文章目录 前言一、IP协议的简介二、IP数据报1.IP 数据报结构2.IP 数据报的分片解析3.IP 数据报的分片重装 三、IP 数据报的输出四、IP 数据报的输入 前言 IP 指网际互连协议, Internet Protocol 的缩写,是 TCP/IP 体系中的网络层协议。设计 IP 的目的是…...
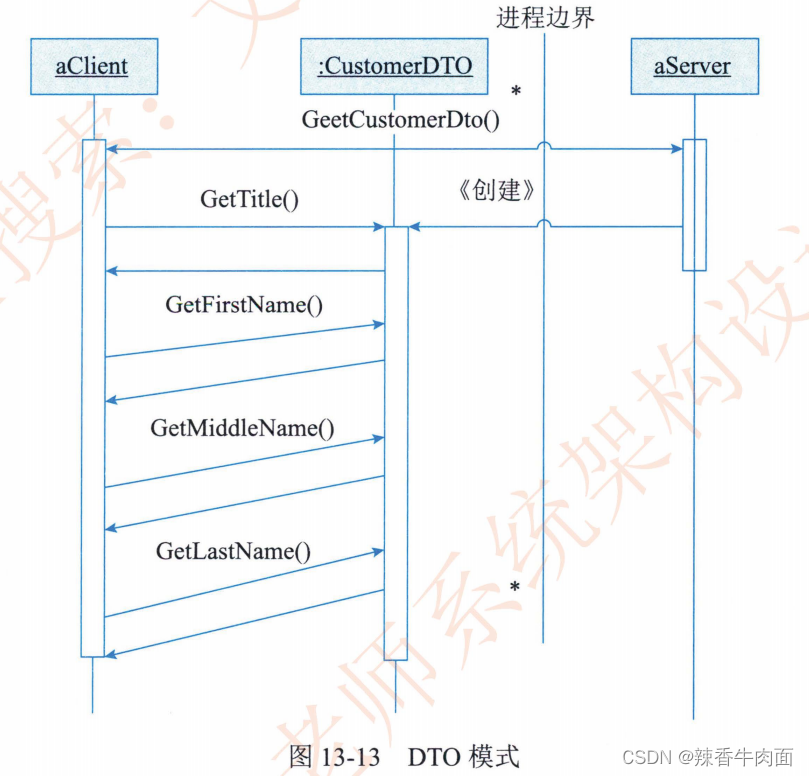
第13章 层次式架构设计理论与实践
层次式架构的核心思想是将系统组成为一种层次结构,每一层为上层服务,并作为下层客户。其实不管是分层还是其他的架构都是为了解耦,更好的复用,只要秉承着这种思想去理解一切都迎刃而解了。 13.1 层次上体系结构概述 回顾一下软件…...
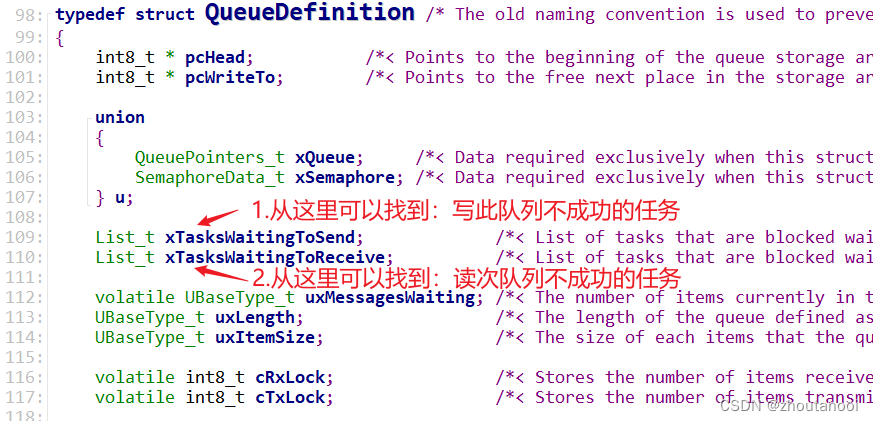
FreeRtos进阶——消息队列的操作逻辑
消息队列(queue) 在不同的任务之间,如果我们需要互相之间通信,使用全局变量进行通信,是一种不安全的通信的方式。为保证线程安全,我们需要引入消息队列的通信方式。 粗暴的消息队列 为保证线程的安全&am…...

WordPress搭建流程
1. 简介 WordPress 是一个 PHP 编写的网站制作平台。WordPress 本身免费,并且拥有众多的主题可以使用,适合用于搭建个人博客、公司官网、独立站等。 2. 环境准备 2.1 WordPress 下载 WordPress 可以在 Worpress中文官网 下载(如果后续要将后台调成中文的话,一定要从中文…...
数据集004:跌倒检测数据集 (含数据集下载链接)
数据集简介: 该数据集为跌倒检测数据集,属于imageclassify任务,分为fall和nofall两大类,累计共1000张图片,均为人工标注 xml格式,可用于yolo训练。 数据集链接:跌倒检测数据集(1000…...

苹果与OpenAI合作在即:iOS 18中的ChatGPT引发期待与担忧
每周跟踪AI热点新闻动向和震撼发展 想要探索生成式人工智能的前沿进展吗?订阅我们的简报,深入解析最新的技术突破、实际应用案例和未来的趋势。与全球数同行一同,从行业内部的深度分析和实用指南中受益。不要错过这个机会,成为AI领…...

Android 逆向学习【2】——APK基本结构
APK安装在安卓机器上的,相当于就是windows的exe文件 APK实际上是个压缩包 只要是压缩的东西 .jar也是压缩包 里面是.class(java编译后的一些东西) APK是Android Package的缩写,即Android安装包。而apk文件其实就是一个压缩包,我们可以将apk文件的后…...

耦合详解-模块
耦合详解 耦合(Coupling)是衡量软件模块之间相互依赖程度的指标。低耦合是优秀软件设计的核心目标之一,它使系统更易于维护、测试和扩展。 1. 耦合的本质 耦合描述的是两个模块(类、组件、服务)之间的依赖关系强度。当修改一个模块时,需要修改其他模块的程度越高,耦合…...

智能视频PPT提取:从动态内容到静态文档的高效转化方案
智能视频PPT提取:从动态内容到静态文档的高效转化方案 【免费下载链接】extract-video-ppt extract the ppt in the video 项目地址: https://gitcode.com/gh_mirrors/ex/extract-video-ppt 场景痛点:视频内容提取的三大核心挑战 如何从90分钟的…...

Phi-4-mini-reasoning企业级落地:金融风控规则推理引擎构建案例
Phi-4-mini-reasoning企业级落地:金融风控规则推理引擎构建案例 1. 项目背景与模型介绍 在金融风控领域,规则推理引擎是核心决策系统的重要组成部分。传统规则引擎往往面临维护成本高、灵活性差、难以应对复杂场景等问题。Phi-4-mini-reasoning作为一款…...

XUnity.AutoTranslator:Unity游戏实时翻译插件终极指南
XUnity.AutoTranslator:Unity游戏实时翻译插件终极指南 【免费下载链接】XUnity.AutoTranslator 项目地址: https://gitcode.com/gh_mirrors/xu/XUnity.AutoTranslator 还在为看不懂外语游戏而烦恼吗?🎮 语言障碍让多少精彩游戏体验大…...

Win11Debloat:让你的Windows系统重获新生的终极优化指南
Win11Debloat:让你的Windows系统重获新生的终极优化指南 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declutter and …...

Chandra AI在教育领域的应用:智能学习助手开发
Chandra AI在教育领域的应用:智能学习助手开发 1. 引言 想象一下这样的场景:一个学生在深夜复习功课,遇到一道数学难题却找不到老师请教;一个上班族想学习新技能,但时间碎片化难以系统学习;一个老师面对几…...

Qt桌面应用集成PaddleOCR:从环境搭建到精准识别的实践指南
1. 环境准备:搭建PaddleOCR的Qt开发环境 第一次在Qt里折腾PaddleOCR时,我对着官方文档折腾了半天还是报错,后来发现是第三方库的路径没配好。这里分享下我踩坑后总结的可靠方案。 核心依赖三件套:PaddlePaddle推理库、PaddleOCR C…...

别再手动调时间了!手把手教你用LinuxPTP的ptp4l和phc2sys搞定TSN网络时钟同步
工业TSN网络高精度时钟同步实战:从原理到生产环境部署 在工业自动化、智能驾驶和实时音视频传输领域,微秒级的时间同步已成为刚需。传统NTP协议毫秒级的精度在这些场景下显得力不从心,而基于IEEE 1588和802.1AS协议的PTP(精确时间…...

AI赋能:让快马平台解析21届智能车赛规则并生成智能算法代码
最近在准备21届智能车比赛时,发现今年的赛道规则特别复杂,各种新加入的元素和评分标准让人有点头大。正好尝试用InsCode(快马)平台的AI辅助开发功能来帮忙解析规则并生成算法代码,整个过程意外地顺利,分享下具体实现思路。 规则文…...

如何用Python免费下载B站4K大会员视频:bilibili-downloader完整指南
如何用Python免费下载B站4K大会员视频:bilibili-downloader完整指南 【免费下载链接】bilibili-downloader B站视频下载,支持下载大会员清晰度4K,持续更新中 项目地址: https://gitcode.com/gh_mirrors/bil/bilibili-downloader 还在为…...