Llama改进之——RoPE旋转位置编码
引言
旋转位置编码(Rotary Position Embedding, RoPE)将绝对相对位置依赖纳入自注意力机制中,以增强Transformer架构的性能。目前很火的大模型LLaMA、QWen等都应用了旋转位置编码。
之前在[论文笔记]ROFORMER中对旋转位置编码的原始论文进行了解析,重点推导了旋转位置编码的公式,本文侧重实现,同时尽量简化数学上的推理,详细内容可见最后的参考文章。
复数与极坐标
复数由两个部分组成:实部(real part)和虚部(imaginary part)。实部就是一个普通的数字,可以是零、正数或负数。虚部是另一个实数与 i i i相乘。比如 2 + 3 i 2+3i 2+3i是一个复数,其中 2 2 2是实部; 3 i 3i 3i是虚部。下面这些数字都是复数:
2 , 2 + 2 i , 1 − 3 i , − 4 i , 17 i 2, \quad 2+2i,\quad 1-3i,\quad -4i,\quad 17i 2,2+2i,1−3i,−4i,17i
可以看到复数是实数的扩展,包含了实数,比如 2 2 2可以看成是虚部为 0 0 0。
通常实数放前面,然后是 i i i。但当 i i i与三角函数( sin , cos \sin,\cos sin,cos)在一起通常把 i i i放在前面: i sin θ , i cos θ i \sin \theta, i\cos \theta isinθ,icosθ。
i i i我们可以理解为就是一个简单的数学对象,满足 i 2 = − 1 i^2=-1 i2=−1。
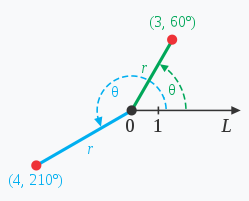
极坐标系是一个二维坐标系统。该坐标系统中任意位置可由一个夹角和一段相对原点——极点的距离来表示。如上图(来自百度百科)所示。
给定极坐标系内的任意一个复数 x + y i x+yi x+yi(对应二维向量 [ x , y ] [x,y] [x,y]),要将其(逆时针)旋转 θ \theta θ度,只需要乘上旋转子:
R θ = cos θ + i sin θ ( sin 2 θ + cos 2 θ = 1 ) (1) \pmb R_\theta = \cos \theta + i \sin \theta \qquad(\sin^2 \theta + \cos^2 \theta = 1) \tag 1 RRRθ=cosθ+isinθ(sin2θ+cos2θ=1)(1)
可以相乘再展开,然后利用 i 2 = − 1 i^2=-1 i2=−1可得:
x ′ + y ′ i = ( cos θ + i sin θ ) ( x + y i ) = ( x cos θ − y sin θ ) + ( x sin θ + y cos θ ) i \begin{aligned} x^\prime + y^\prime i &= (\cos \theta + i\sin \theta)(x + yi) \\ &= (x \cos \theta - y \sin \theta)+(x \sin \theta + y \cos \theta)i \end{aligned} x′+y′i=(cosθ+isinθ)(x+yi)=(xcosθ−ysinθ)+(xsinθ+ycosθ)i
对应二维平面中点 [ x , y ] [x,y] [x,y]关于原点的逆时针旋转:
[ x ′ y ′ ] = [ cos θ − sin θ sin θ cos θ ] [ x y ] \begin{bmatrix} x^\prime \\ y^\prime \end{bmatrix} = \begin{bmatrix} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} [x′y′]=[cosθsinθ−sinθcosθ][xy]
其中包含 θ \theta θ的矩阵是一个旋转矩阵。
旋转位置编码
x i ∈ R d \pmb x_i \in \Bbb R^d xxxi∈Rd是无位置信息的标记 w i w_i wi的 d d d维词嵌入向量。自注意力首先将位置信息与单词嵌入相结合,并将其转化为query、key和value的表示形式。
q m = f q ( x m , m ) k n = f k ( x n , n ) v n = f v ( x n , n ) (2) \begin{aligned} \pmb q_m &= f_q(\pmb x_m, m) \\ \pmb k_n &= f_k(\pmb x_n, n) \\ \pmb v_n &= f_v(\pmb x_n, n) \\ \end{aligned} \tag 2 qqqmkkknvvvn=fq(xxxm,m)=fk(xxxn,n)=fv(xxxn,n)(2)
其中 q m , k n \pmb q_m,\pmb k_n qqqm,kkkn和 v n \pmb v_n vvvn分别通过 f q , f k f_q,f_k fq,fk和 f v f_v fv整合了第m和第n个位置信息。query和key然后用于计算注意力权重,而输出为value的加权和。
$$
\begin{aligned}
a_{m,n} &= \frac{\exp(\frac{\pmb q^T_m \pmb k_n}{\sqrt d})}{\sum_{j=1}^N \exp \frac{\pmb q^T_m \pmb k_j}{\sqrt d}} \
\pmb o_m &= \sum_{n=1}^N a_{m,n}\pmb v_n \
\end{aligned} \tag 3
$$
Transformer通过自注意机制利用各个标记的位置信息,如等式(3)中所见, q m T k n \pmb q_m^T \pmb k_n qqqmTkkkn通常可以在不同位置的标记之间传递知识。为了融入相对位置信息,我们需要将查询 q m \pmb q_m qqqm和键 k n \pmb k_n kkkn的内积公式转化为一个函数 g g g,该函数只接受词嵌入 x m , x n \pmb x_m,\pmb x_n xxxm,xxxn以及它们的相对位置 m − n m-n m−n作为输入变量。换句话说,我们希望内积只以相对形式编码位置信息:
⟨ f q ( x m , m ) , f k ( x n , n ) ⟩ = g ( x m , x n , m − n ) (4) \langle f_q(\pmb x_m,m) , f_k(\pmb x_n,n) \rangle = g(\pmb x_m,\pmb x_n, m-n) \tag 4 ⟨fq(xxxm,m),fk(xxxn,n)⟩=g(xxxm,xxxn,m−n)(4)
最终目标是找到一个等价的编码方式来求解函数 f q ( x m , m ) f_q(\pmb x_m, m) fq(xxxm,m)和 f k ( x n , n ) f_k(\pmb x_n, n) fk(xxxn,n),以符合上等式。
从简单的维度 d = 2 d=2 d=2的情况开始,这样可以利用二维平面上向量的几何特性及其复数形式来证明公式(4)的一个解是:
f q ( x m , m ) = ( W q x m ) e i m θ f k ( x n , n ) = ( W k x n ) e i n θ g ( x m , x n , m − n ) = Re [ ( W q x m ) ( W k x n ) ∗ e i ( m − n ) θ ] (5) \begin{aligned} f_q(\pmb x_m,m) &= (\pmb W_q\pmb x_m) e^{im\theta} \\ f_k(\pmb x_n,n) &= (\pmb W_k\pmb x_n) e^{in\theta} \\ g(\pmb x_m,\pmb x_n,m-n) &= \text{Re}[(\pmb W_q\pmb x_m)(\pmb W_k\pmb x_n)^*e^{i(m-n)\theta}] \end{aligned} \tag {5} fq(xxxm,m)fk(xxxn,n)g(xxxm,xxxn,m−n)=(WWWqxxxm)eimθ=(WWWkxxxn)einθ=Re[(WWWqxxxm)(WWWkxxxn)∗ei(m−n)θ](5)
这里 Re [ ⋅ ] \text{Re}[\cdot] Re[⋅]表示复数的实部; ( W k x n ) ∗ (\pmb W_k\pmb x_n)^* (WWWkxxxn)∗表示 ( W k x n ) (\pmb W_k\pmb x_n) (WWWkxxxn)的共轭复数; θ ∈ R \theta \in \Bbb R θ∈R表示一个非零常数。
可以进一步将 f { q , k } f_{\{q,k\}} f{q,k}写成矩阵乘法形式:
f { q , k } ( x m , m ) = ( cos m θ − sin m θ sin m θ cos m θ ) ( W { q , k } ( 11 ) W { q , k } ( 12 ) W { q , k } ( 21 ) W { q , k } ( 22 ) ) ( x m ( 1 ) x m ( 2 ) ) (6) f_{\{q,k\}} (\pmb x_m,m) =\begin{pmatrix} \cos m\theta & -\sin m\theta \\ \sin m\theta & \cos m\theta \end{pmatrix}\begin{pmatrix} W_{\{q,k\}}^{(11)} & W_{\{q,k\}}^{(12)} \\ W_{\{q,k\}}^{(21)} & W_{\{q,k\}}^{(22)} \end{pmatrix} \begin{pmatrix} x_m^{(1)} \\ x_m^{(2)} \end{pmatrix} \tag{6} f{q,k}(xxxm,m)=(cosmθsinmθ−sinmθcosmθ)(W{q,k}(11)W{q,k}(21)W{q,k}(12)W{q,k}(22))(xm(1)xm(2))(6)
这里的 { q , k } \{q,k\} {q,k}表示 q q q和 k k k的集合,比如上式对 f q f_q fq和 f k f_k fk都成立;包含 sin m θ \sin m\theta sinmθ或 cos m θ \cos m\theta cosmθ的矩阵是上面介绍的旋转矩阵。
其中$ (x^{(1)}_m, x^{(2)}_m) 为 为 为x_m$ 在二维坐标中的表示。类似地, g g g 可以被视为一个矩阵,从而能够在二维情况下求解等式 ( 4 ) (4) (4)。具体来说,结合相对位置嵌入是很直接的:只需将仿射变换后的词嵌入向量旋转一定角度乘位置索引(旋转 m θ m\theta mθ),从而解释了旋转位置嵌入背后的直觉。
我们进行直观理解,假设两个向量 q \pmb q qqq和 k \pmb k kkk它们的夹角为 θ \theta θ,根据向量夹角的余弦我们知道 q ⋅ k = ∣ q ∣ ∣ k ∣ cos θ \pmb q \cdot \pmb k = |\pmb q||\pmb k| \cos \theta qqq⋅kkk=∣qqq∣∣kkk∣cosθ。
当 q \pmb q qqq(逆时针)旋转 α \alpha α角度后,与 k \pmb k kkk的夹角变成了 θ + α \theta + \alpha θ+α:

当 k \pmb k kkk旋转 β \beta β角度后,与 q \pmb q qqq的夹角变成了 θ − β \theta - \beta θ−β:
当两个向量同时旋转后,它们的夹角变成了 θ + α − β \theta + \alpha -\beta θ+α−β。内积表达式为:
q ⋅ k = ∣ q ∣ ∣ k ∣ cos ( θ + α − β ) \pmb q \cdot \pmb k = |\pmb q||\pmb k| \cos (\theta + \alpha - \beta) qqq⋅kkk=∣qqq∣∣kkk∣cos(θ+α−β)
特殊地,当 α − β = 0 \alpha - \beta =0 α−β=0时,即两个向量旋转的角度相同,它们的内积不变。通过这两个向量的夹角来影响内积的值。通过这种直觉,公式(4)是成立的。
为了将我们在二维空间中的结果推广到任意 x i ∈ R d \pmb x_i ∈ \R^d xxxi∈Rd,其中 d d d 是偶数。我们可以将 d d d 维空间划分为 $d/2 $个子空间(分块矩阵),并结合内积的线性特性进行组合,将 f { q , k } f_{\{q,k\}} f{q,k} 转化为:
f { q , k } = ( x m , m ) = R Θ , m d W { q , k } x m (7) f_{\{q,k\}} = (\pmb x_m,m) = \pmb R_{\Theta,m}^d \pmb W_{\{q,k\}} \pmb x_m \tag{7} f{q,k}=(xxxm,m)=RRRΘ,mdWWW{q,k}xxxm(7)
这里说的特性是指线性叠加性:
定义:内积的定义是两个向量对应分量相乘后再相加。假设有两个向量 v ⃗ = ( v 1 , v 2 , . . . , v n ) \vec{v} = (v_1, v_2, ..., v_n) v=(v1,v2,...,vn) 和 w ⃗ = ( w 1 , w 2 , . . . , w n ) \vec{w} = (w_1, w_2, ..., w_n) w=(w1,w2,...,wn),它们的内积可以表示为 v ⃗ ⋅ w ⃗ = v 1 w 1 + v 2 w 2 + . . . + v n w n \vec{v} \cdot \vec{w} = v_1w_1 + v_2w_2 + ... + v_nw_n v⋅w=v1w1+v2w2+...+vnwn。
线性性质:内积满足线性叠加性,即对于任意标量 a a a 和向量 v ⃗ , w ⃗ , u ⃗ \vec{v}, \vec{w}, \vec{u} v,w,u,有以下性质:
- 可加性: v ⃗ ⋅ ( w ⃗ + u ⃗ ) = v ⃗ ⋅ w ⃗ + v ⃗ ⋅ u ⃗ \vec{v} \cdot (\vec{w} + \vec{u}) = \vec{v} \cdot \vec{w} + \vec{v} \cdot \vec{u} v⋅(w+u)=v⋅w+v⋅u
- 齐次性: ( a v ⃗ ) ⋅ w ⃗ = a ( v ⃗ ⋅ w ⃗ ) (a\vec{v}) \cdot \vec{w} = a(\vec{v} \cdot \vec{w}) (av)⋅w=a(v⋅w)
其中
R Θ , m d = ( cos m θ 1 − sin m θ 1 0 0 ⋯ 0 0 sin m θ 1 cos m θ 1 0 0 ⋯ 0 0 0 0 cos m θ 2 − sin m θ 2 ⋯ 0 0 0 0 sin m θ 2 cos m θ 2 ⋯ 0 0 ⋮ ⋮ ⋮ ⋮ ⋱ ⋮ ⋮ 0 0 0 0 ⋯ cos m θ d / 2 − sin m θ d / 2 0 0 0 0 ⋯ sin m θ d / 2 cos m θ d / 2 ) (8) \pmb R_{\Theta,m}^d = \begin{pmatrix} \cos m\theta_1 & -\sin m\theta_1 & 0 & 0 & \cdots & 0 & 0 \\ \sin m\theta_1 & \cos m\theta_1 & 0 & 0 & \cdots & 0 & 0 \\ 0 & 0 & \cos m\theta_2 & -\sin m\theta_2 & \cdots & 0 & 0 \\ 0 & 0 & \sin m\theta_2 & \cos m\theta_2 & \cdots & 0 & 0 \\ \vdots & \vdots & \vdots & \vdots & \ddots & \vdots & \vdots \\ 0 & 0 & 0 & 0 & \cdots & \cos m\theta_{d/2} & -\sin m\theta_{d/2} \\ 0 & 0 & 0 & 0 & \cdots & \sin m\theta_{d/2} & \cos m\theta_{d/2} \\ \end{pmatrix} \tag{8} RRRΘ,md=⎝⎜⎜⎜⎜⎜⎜⎜⎜⎜⎛cosmθ1sinmθ100⋮00−sinmθ1cosmθ100⋮0000cosmθ2sinmθ2⋮0000−sinmθ2cosmθ2⋮00⋯⋯⋯⋯⋱⋯⋯0000⋮cosmθd/2sinmθd/20000⋮−sinmθd/2cosmθd/2⎠⎟⎟⎟⎟⎟⎟⎟⎟⎟⎞(8)
是一个带有预定义参数 Θ = { θ i = 1000 0 − 2 ( i − 1 ) / d , i ∈ [ 1 , 2 , . . . , d / 2 ] } Θ = \{θ_i = 10000^{−2(i−1)/d}, i ∈ [1, 2, ..., d/2]\} Θ={θi=10000−2(i−1)/d,i∈[1,2,...,d/2]} 的旋转矩阵。RoPE的图示如原论文中的图(1)所示。将RoPE应用于等式(3)中的自注意力机制,我们可以得到:
q m ⊤ k n = ( R Θ , m d W q x m ) ⊤ ( R Θ , n d W k x n ) = x m ⊤ W q R Θ , n − m d W k x n (9) \pmb q_m^\top \pmb k_n = (\pmb R_{\Theta,m}^d \pmb W_{q}\pmb x_m)^\top (\pmb R_{\Theta,n}^d \pmb W_{k}\pmb x_n) = \pmb x_m^\top \pmb W_q \pmb R_{\Theta,n-m}^d \pmb W_k \pmb x_n \tag{9} qqqm⊤kkkn=(RRRΘ,mdWWWqxxxm)⊤(RRRΘ,ndWWWkxxxn)=xxxm⊤WWWqRRRΘ,n−mdWWWkxxxn(9)
其中 R Θ , n − m d = ( R Θ , m d ) ⊤ R Θ , n d \pmb R_{\Theta,n-m}^d=(\pmb R_{\Theta,m}^d)^\top \pmb R_{\Theta,n}^d RRRΘ,n−md=(RRRΘ,md)⊤RRRΘ,nd。值得指出的是, R Θ \pmb R_{\Theta} RRRΘ是一个正交矩阵,它不会改变向量的模长,因此通常来说它不会改变原模型的稳定性。
我们可以增大 θ \theta θ的base以支持更长的上下文,这里是10000。
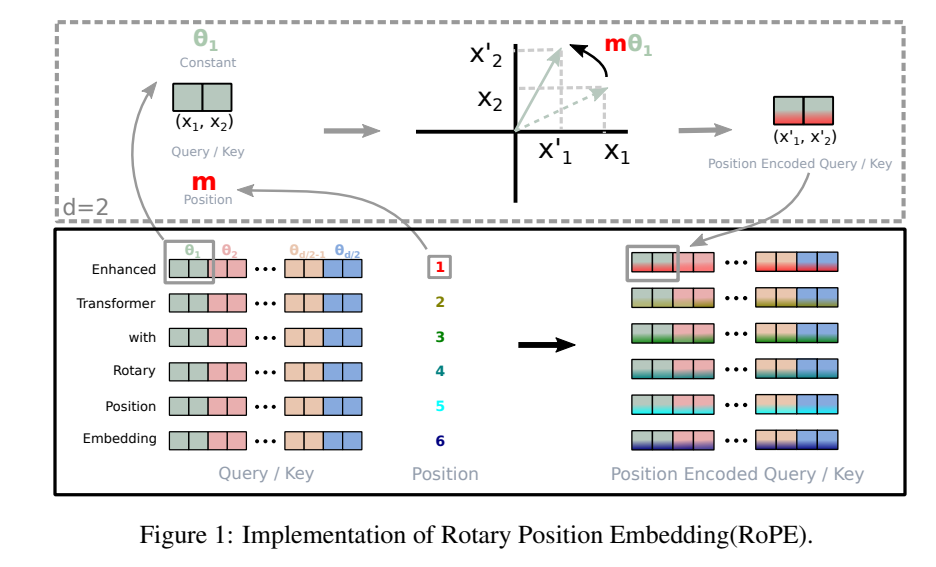
上图所说的是一个长度为6的序列,在进行自注意力计算时,Query和Key向量经过旋转位置编码变换的过程。首先对于位置1来说,记为 m m m。然后仅考虑第一个二维子空间,即 ( x 1 , x 2 ) (x_1,x_2) (x1,x2)向量,旋转 m θ 1 m\theta_1 mθ1后得到的增强表示。
由于公式(8)中 R Θ , m d \pmb R^d_{\Theta,m} RRRΘ,md的稀疏性,可以通过下述等价方式来实现 R Θ , m d \pmb R^d_{\Theta,m} RRRΘ,md和 x ∈ R d \pmb x \in \R^d xxx∈Rd的乘法:
KaTeX parse error: No such environment: equation at position 37: …\pmb x = \begin{̲e̲q̲u̲a̲t̲i̲o̲n̲}̲\begin{pmatrix}…
其中 ⊗ \otimes ⊗是逐位对应相乘。
为什么可以简化成这样子,把乘 x \pmb x xxx带入公式(8)得到:
R Θ , m d x = ( cos m θ 1 − sin m θ 1 0 0 ⋯ 0 0 sin m θ 1 cos m θ 1 0 0 ⋯ 0 0 0 0 cos m θ 2 − sin m θ 2 ⋯ 0 0 0 0 sin m θ 2 cos m θ 2 ⋯ 0 0 ⋮ ⋮ ⋮ ⋮ ⋱ ⋮ ⋮ 0 0 0 0 ⋯ cos m θ d / 2 − sin m θ d / 2 0 0 0 0 ⋯ sin m θ d / 2 cos m θ d / 2 ) ( x 1 x 2 x 3 x 4 ⋮ x d − 1 x d ) \pmb R_{\Theta,m}^d \pmb x= \begin{pmatrix}\begin{array}{cc:cc:cc:cc} \cos m\theta_1 & -\sin m\theta_1 & 0 & 0 & \cdots & 0 & 0 \\ \sin m\theta_1 & \cos m\theta_1 & 0 & 0 & \cdots & 0 & 0 \\ \hdashline 0 & 0 & \cos m\theta_2 & -\sin m\theta_2 & \cdots & 0 & 0 \\ 0 & 0 & \sin m\theta_2 & \cos m\theta_2 & \cdots & 0 & 0 \\ \hdashline \vdots & \vdots & \vdots & \vdots & \ddots & \vdots & \vdots \\ \hdashline 0 & 0 & 0 & 0 & \cdots & \cos m\theta_{d/2} & -\sin m\theta_{d/2} \\ 0 & 0 & 0 & 0 & \cdots & \sin m\theta_{d/2} & \cos m\theta_{d/2} \\ \end{array}\end{pmatrix} \begin{pmatrix}x_1 \\ x_2 \\ \hdashline x_3 \\ x_4 \\ \hdashline\vdots \\ \hdashline x_{d-1} \\ x_{d}\end{pmatrix} RRRΘ,mdxxx=⎝⎜⎜⎜⎜⎜⎜⎜⎜⎜⎛cosmθ1sinmθ100⋮00−sinmθ1cosmθ100⋮0000cosmθ2sinmθ2⋮0000−sinmθ2cosmθ2⋮00⋯⋯⋯⋯⋱⋯⋯0000⋮cosmθd/2sinmθd/20000⋮−sinmθd/2cosmθd/2⎠⎟⎟⎟⎟⎟⎟⎟⎟⎟⎞⎝⎜⎜⎜⎜⎜⎜⎜⎜⎜⎛x1x2x3x4⋮xd−1xd⎠⎟⎟⎟⎟⎟⎟⎟⎟⎟⎞
根据分块矩阵的乘法,我们仅考虑左右两边矩阵的第一块,其得到(10)中向量的第1和第2个元素:
( cos m θ 1 − sin m θ 1 sin m θ 1 cos m θ 1 ) ( x 1 x 2 ) = ( x 1 cos m θ 1 − x 2 sin m θ 1 x 1 sin m θ 1 + x 2 cos m θ 1 ) \begin{pmatrix} \cos m\theta_1 & -\sin m\theta_1\\ \sin m\theta_1 & \cos m\theta_1 \end{pmatrix} \begin{pmatrix} x_1\\ x_2 \end{pmatrix} = \begin{pmatrix}x_1 \cos m\theta_1 - x_2 \sin m\theta_1 \\ x_1 \sin m\theta_1+x_2 \cos m\theta_1 \end{pmatrix} (cosmθ1sinmθ1−sinmθ1cosmθ1)(x1x2)=(x1cosmθ1−x2sinmθ1x1sinmθ1+x2cosmθ1)
因此这是成立的。
代码实现
本节参考LLaMA源码来实现旋转位置编码,同时底层实现逻辑进行一个解释。
首先定义一个函数生成旋转矩阵:
def precompute_freqs_cis(dim: int, end: int, theta: float = 10000.0):"""给定维度预计算频率(\theta) Tensor的复指数(complex exponentials,cis)Args:dim (int): dimension of the frequency tensorend (int): end index for precomputing frequenciestheta (float, optional): scaling factor for frequency computation. Defaults to 10000.0.Returns:torch.Tensor: Precomputed frequency tensor with complex exponentials."""# freqs (dim/2, )# theta_i = 10000 ** (-2(i-1)/dim) for i = [1,2,...,dim / 2]# theta_i# we start from 0 dont need to do i-1freqs = 1.0 / (theta ** (torch.arange(0, dim, 2).float() / dim))# generate token sequence m = [0, 1, ..., seq_len - 1]# m (end, )m = torch.arange(end, device=freqs.device)# compute m * \theta# freqs (end, dim / 2)freqs = torch.outer(m, freqs).float()# freqs_cis (end, dim / 2)freqs_cis = torch.polar(torch.ones_like(freqs), freqs)return freqs_cis
这个函数用于生成公式(8)中的旋转矩阵。
首先计算预定义参数 Θ = { θ i = 1000 0 − 2 ( i − 1 ) / d , i ∈ [ 1 , 2 , . . . , d / 2 ] } Θ = \{θ_i = 10000^{−2(i−1)/d}, i ∈ [1, 2, ..., d/2]\} Θ={θi=10000−2(i−1)/d,i∈[1,2,...,d/2]} ,我们的 i i i从 0 0 0开始因此不需要 i − 1 i-1 i−1,对应上面的Line 17。
然后考虑所有的位置,生成一个m = (seq_len, )形状的向量,Line 20。
计算m和Line 17计算出来的freqs的外积,即m中的每个位置 m i m_i mi都会乘上 Θ Θ Θ的每个元素,得到一个(seq_len, dim / 2)形状的矩阵。假设序列的长度
假设 m = [ m 1 , m 2 , ⋯ , m T ] = [ 1 , 2 , ⋯ , N ] m=[m_1,m_2,\cdots,m_T] =[1,2,\cdots, N] m=[m1,m2,⋯,mT]=[1,2,⋯,N],这里 N N N表示序列长度。
它们的乘积是一个矩阵:
( m 1 θ 1 m 1 θ 2 ⋯ m 1 θ d / 2 m 2 θ 1 m 2 θ 2 ⋯ m 2 θ d / 2 ⋮ ⋮ ⋱ ⋮ m N θ 1 m N θ 2 ⋯ m N θ d / 2 ) \begin{pmatrix} m_1 \theta_1 & m_1 \theta_2 & \cdots & m_1 \theta_{d/2} \\ m_2 \theta_1 & m_2 \theta_2 & \cdots & m_2 \theta_{d/2} \\ \vdots & \vdots &\ddots &\vdots \\ m_N \theta_1 & m_N \theta_2 & \cdots & m_N \theta_{d/2} \end{pmatrix} ⎝⎜⎜⎜⎛m1θ1m2θ1⋮mNθ1m1θ2m2θ2⋮mNθ2⋯⋯⋱⋯m1θd/2m2θd/2⋮mNθd/2⎠⎟⎟⎟⎞
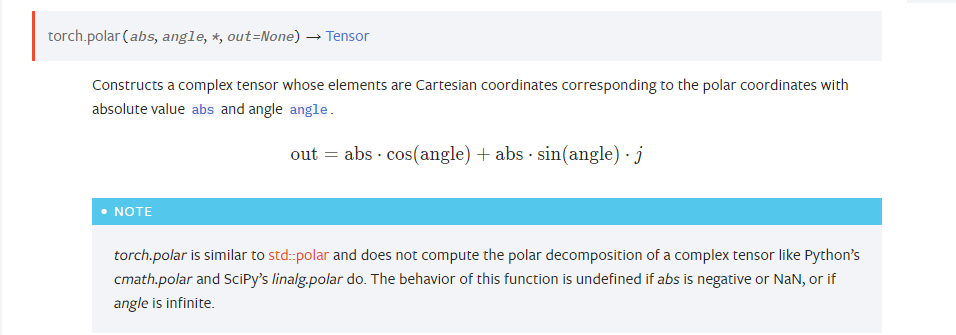
最后在Line 25通过torch.polar将它们转换为复数形式:
( cos ( m 1 θ 1 ) + i ⋅ sin ( m 1 θ 1 ) cos ( m 1 θ 2 ) + i ⋅ sin ( m 1 θ 2 ) ⋯ cos ( m 1 θ d / 2 ) + i ⋅ sin ( m 1 θ d / 2 ) cos ( m 2 θ 1 ) + i ⋅ sin ( m 2 θ 1 ) cos ( m 2 θ 2 ) + i ⋅ sin ( m 2 θ 2 ) ⋯ cos ( m 2 θ d / 2 ) + i ⋅ sin ( m 2 θ d / 2 ) ⋮ ⋮ ⋱ ⋮ cos ( m N θ 1 ) + i ⋅ sin ( m N θ 1 ) cos ( m N θ 2 ) + i ⋅ sin ( m N θ 2 ) ⋯ cos ( m N θ d / 2 ) + i ⋅ sin ( m N θ d / 2 ) ) \begin{pmatrix} \cos(m_1 \theta_1) + i\cdot \sin(m_1 \theta_1) & \cos(m_1 \theta_2) + i\cdot \sin(m_1 \theta_2) & \cdots & \cos(m_1 \theta_{d/2}) + i\cdot \sin(m_1 \theta_{d/2}) \\ \cos(m_2 \theta_1) + i\cdot \sin(m_2 \theta_1) & \cos(m_2 \theta_2) + i\cdot \sin(m_2 \theta_2) & \cdots & \cos(m_2 \theta_{d/2}) + i\cdot \sin(m_2 \theta_{d/2}) \\ \vdots & \vdots &\ddots &\vdots \\ \cos(m_N \theta_1) + i\cdot \sin(m_N \theta_1) & \cos(m_N \theta_2) + i\cdot \sin(m_N \theta_2) & \cdots & \cos(m_N \theta_{d/2}) + i\cdot \sin(m_N \theta_{d/2}) \\ \end{pmatrix} ⎝⎜⎜⎜⎛cos(m1θ1)+i⋅sin(m1θ1)cos(m2θ1)+i⋅sin(m2θ1)⋮cos(mNθ1)+i⋅sin(mNθ1)cos(m1θ2)+i⋅sin(m1θ2)cos(m2θ2)+i⋅sin(m2θ2)⋮cos(mNθ2)+i⋅sin(mNθ2)⋯⋯⋱⋯cos(m1θd/2)+i⋅sin(m1θd/2)cos(m2θd/2)+i⋅sin(m2θd/2)⋮cos(mNθd/2)+i⋅sin(mNθd/2)⎠⎟⎟⎟⎞
torch.polar(abs, angle)基于abs和angle计算出一个极坐标系中的复数表示:
那如何达到公式(10)的结果呢,为了简单,这里只展示 d = 4 d=4 d=4的情况,考虑某个Token x \pmb x xxx:
x = [ x 1 x 2 x 3 x 4 ] \pmb x=\begin{bmatrix} x_1 & x_2 & x_3 & x_4 \end{bmatrix} xxx=[x1x2x3x4]
第一步把 x \pmb x xxx的元素两两分组:
x = [ [ x 1 , x 2 ] [ x 3 , x 4 ] ] \pmb x=\begin{bmatrix} [x_1 ,x_2 ] & [x_3 ,x_4] \end{bmatrix} xxx=[[x1,x2][x3,x4]]
也不考虑批次维度,形状由(1,4)变成(1,2,2)。然后把新的 x \pmb x xxx转换成复数的形式,形状变成了(1, 2):
x = [ x 1 + i ⋅ x 2 x 3 + i ⋅ x 4 ] \pmb x=\begin{bmatrix} x_1 + i\cdot x_2 & x_3 + i \cdot x_4 \end{bmatrix} xxx=[x1+i⋅x2x3+i⋅x4]
即每个二维向量变成了一个复数。然后我们把这个向量矩阵和freqs_cis对应的向量对应位置相乘(分别旋转 m θ 1 , m θ 2 m\theta_1,m\theta_2 mθ1,mθ2角度: d / 2 = 4 / 2 = 2 d/2=4/2=2 d/2=4/2=2),这里假设当前位置为 m m m,然后有:
x = [ x 1 + i ⋅ x 2 x 3 + i ⋅ x 4 ] ⊗ [ cos ( m θ 1 ) + i ⋅ sin ( m θ 1 ) cos ( m θ 2 ) + i ⋅ sin ( m θ 2 ) ] = [ ( x 1 + i ⋅ x 2 ) [ cos ( m θ 1 ) + i ⋅ sin ( m θ 1 ) ] ( x 3 + i ⋅ x 4 ) [ cos ( m θ 2 ) + i ⋅ sin ( m θ 2 ) ] ] = [ x 1 cos m θ 1 + i ⋅ x 1 sin m θ 1 + i ⋅ x 2 cos m θ 1 − x 2 sin m θ 1 x 3 cos m θ 2 + i ⋅ x 3 sin m θ 2 + i ⋅ x 4 cos m θ 2 − x 4 sin m θ 2 ] = [ x 1 cos m θ 1 − x 2 sin m θ 1 + i ( x 1 sin m θ 1 + x 2 cos m θ 1 ) x 3 cos m θ 2 − x 4 sin m θ 2 + i ( x 3 sin m θ 2 + x 4 cos m θ 2 ) ] \begin{aligned} \pmb x &=\begin{bmatrix} x_1 + i\cdot x_2 & x_3 + i \cdot x_4 \end{bmatrix} \otimes \begin{bmatrix} \cos(m \theta_1) + i\cdot \sin(m \theta_1) & \cos(m \theta_2) + i\cdot \sin(m \theta_2)\end{bmatrix} \\ &= \begin{bmatrix} (x_1 + i\cdot x_2) [\cos(m \theta_1) + i\cdot \sin(m \theta_1)] & (x_3 + i \cdot x_4) [\cos(m \theta_2) + i\cdot \sin(m \theta_2)] \end{bmatrix} \\ &= \begin{bmatrix} x_1 \cos m \theta_1 +i\cdot x_1 \sin m \theta_1 + i \cdot x_2 \cos m \theta_1 - x_2 \sin m \theta_1 & x_3 \cos m \theta_2 +i\cdot x_3 \sin m \theta_2 + i \cdot x_4 \cos m \theta_2 - x_4 \sin m \theta_2 \end{bmatrix} \\ &= \begin{bmatrix} x_1 \cos m \theta_1 - x_2 \sin m \theta_1+ i(x_1 \sin m \theta_1 + x_2 \cos m \theta_1) & x_3 \cos m \theta_2 -x_4 \sin m \theta_2 +i(x_3 \sin m \theta_2 +x_4 \cos m \theta_2) \end{bmatrix} \\ \end{aligned} xxx=[x1+i⋅x2x3+i⋅x4]⊗[cos(mθ1)+i⋅sin(mθ1)cos(mθ2)+i⋅sin(mθ2)]=[(x1+i⋅x2)[cos(mθ1)+i⋅sin(mθ1)](x3+i⋅x4)[cos(mθ2)+i⋅sin(mθ2)]]=[x1cosmθ1+i⋅x1sinmθ1+i⋅x2cosmθ1−x2sinmθ1x3cosmθ2+i⋅x3sinmθ2+i⋅x4cosmθ2−x4sinmθ2]=[x1cosmθ1−x2sinmθ1+i(x1sinmθ1+x2cosmθ1)x3cosmθ2−x4sinmθ2+i(x3sinmθ2+x4cosmθ2)]
得到一个形状为(1,2)的复数项链。
然后我们把里面的复数变为二维向量:
x = [ [ x 1 cos m 1 θ 1 − x 2 sin m 1 θ 1 x 1 sin m 1 θ 1 + x 2 cos m 1 θ 1 ] [ x 3 cos m 1 θ 2 − x 4 sin m 1 θ 2 x 3 sin m 1 θ 2 + x 4 cos m 1 θ 2 ] ] \pmb x= \begin{bmatrix} \begin{bmatrix} x_1 \cos m_1 \theta_1 - x_2 \sin m_1 \theta_1 \\ x_1 \sin m_1 \theta_1 + x_2 \cos m_1 \theta_1 \end{bmatrix} & \begin{bmatrix} x_3 \cos m_1 \theta_2 -x_4 \sin m_1 \theta_2 \\ x_3 \sin m_1 \theta_2 +x_4 \cos m_1 \theta_2 \end{bmatrix} \end{bmatrix} xxx=[[x1cosm1θ1−x2sinm1θ1x1sinm1θ1+x2cosm1θ1][x3cosm1θ2−x4sinm1θ2x3sinm1θ2+x4cosm1θ2]]
最后拉平其中的二维向量:
x = [ x 1 cos m θ 1 − x 2 sin m θ 1 x 1 sin m θ 1 + x 2 cos m θ 1 x 3 cos m θ 2 − x 4 sin m θ 2 x 3 sin m θ 2 + x 4 cos m 1 θ 2 ] \pmb x= \begin{bmatrix} x_1 \cos m \theta_1 - x_2 \sin m \theta_1 & x_1 \sin m \theta_1 + x_2 \cos m \theta_1 & x_3 \cos m \theta_2 -x_4 \sin m \theta_2 & x_3 \sin m \theta_2 +x_4 \cos m_1 \theta_2 \end{bmatrix} xxx=[x1cosmθ1−x2sinmθ1x1sinmθ1+x2cosmθ1x3cosmθ2−x4sinmθ2x3sinmθ2+x4cosm1θ2]
比较公式(10)中前4行的结果,可以发现是一样的,只不过列向量变成了行向量。
基于上面的过程我们就不难理解下面的代码:
def apply_rotary_emb(xq: Tensor, xk: Tensor, freq_cis: Tensor):"""使用给定的频率Tensor将旋转嵌入应用到输入张量中。该函数使用提供的频率使用给定的频率Tensor将旋转嵌入应用到输入张量中。freqs_cis将旋转嵌入应用到给定的查询xq和键xk张量上。输入张量被重塑为复数,并且频率张量被重塑以匹配广播兼容性。生成的张量包含旋转嵌入,并作为实张量返回。Args:xq (torch.Tensor): Query tensor to apply rotary embeddings.xk (torch.Tensor): Key tensor to apply rotary embeddings.freqs_cis (torch.Tensor): Precomputed frequency tensor for complex exponentials.Returns:Tuple[torch.Tensor, torch.Tensor]: Tuple of modified query tensor and key tensor with rotary embeddings."""# xq (batch_size, seq_len, n_head, head_dim)# xq_ (batch_size, seq_len, n_head, head_dim // 2, 2)xq_ = xq.float().reshape(*xq.shape[:-1], -1, 2)xk_ = xk.float().reshape(*xk.shape[:-1], -1, 2)# turn to complex# xq_ (batch_size, seq_len, n_head, head_dim // 2)xq_ = torch.view_as_complex(xq_)xk_ = torch.view_as_complex(xk_)# 应用旋转操作,然后将结果转回实数# xq_out (batch_size, seq_len, n_head, head_dim)xq_out = torch.view_as_real(xq_ * freq_cis).flatten(2)xk_out = torch.view_as_real(xk_ * freq_cis).flatten(2)return xq_out.type_as(xq), xk_out.type_as(xk)下篇文章我们会探讨如何应用旋转位置编码到自注意力上。
参考
- [论文笔记]ROFORMER
- 复数与二维空间旋转
相关文章:
Llama改进之——RoPE旋转位置编码
引言 旋转位置编码(Rotary Position Embedding, RoPE)将绝对相对位置依赖纳入自注意力机制中,以增强Transformer架构的性能。目前很火的大模型LLaMA、QWen等都应用了旋转位置编码。 之前在[论文笔记]ROFORMER中对旋转位置编码的原始论文进行了解析,重点…...
Python的解析网页
课前案例 通过requests模块爬取指定网站中的图片并保存到本地目录中。 上述案例采用的是同步方式下载图片,效率太低。异步方式如下(线程): # target为目标函数;args中传入的是download函数的参数url threading.Threa…...

VBA技术资料MF159:实现某个区域内的数据滚动
我给VBA的定义:VBA是个人小型自动化处理的有效工具。利用好了,可以大大提高自己的工作效率,而且可以提高数据的准确度。“VBA语言専攻”提供的教程一共九套,分为初级、中级、高级三大部分,教程是对VBA的系统讲解&#…...
开源DMS文档管理系统 Nuxeo Vs Alfresco对比及 API 使用概述
1. 文档管理系统是什么 文档管理系统(DMS:Document Management System)是一种软件系统,用于组织、存储、检索和管理电子文档和文件。这些文件可以是各种格式的电子文档,如文本文档、电子表格、图像、音频或视频文件等…...

lambda函数实践
文章目录 1.简单实例2.lambda函数使用3.捕获列表的使用4.lambda表达式的应用1.简单实例 2.lambda函数使用 3.捕获列表的使用 4.lambda表达式的应用 #include <iostream> #include <vector>using namespace std;/** 1.简单实例* 2.lambda函数使用* 3.捕获列表的…...
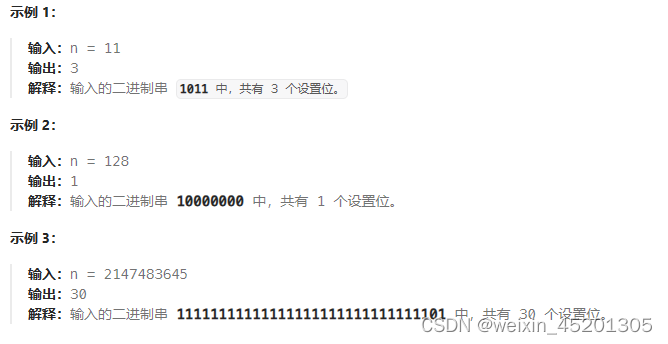
[leetcode hot 150]第一百九十一题,位1的个数
题目: 编写一个函数,输入是一个无符号整数(以二进制串的形式),返回其二进制表达式中设置位的个数(也被称为汉明重量)。 这道题比较简单,直接对最后一位进行与1的与操作,然…...
gitea的git库备份与恢复
文章目录 gitea库的备份与恢复概述笔记实验环境更新git for windows更新 TortoiseGit备份已经存在的gitea的git库目录使用gitea本身来备份所有git库目录将gitea库恢复到新目录m1m2m3启动gitea - 此时已经恢复完成FETCH_HEAD 中有硬写位置再查一下app.ini, 是否改漏了。m1m2 总结…...

【强化学习05】从Q学习到深度Q学习
深度Q学习(Deep Q-Learning, DQN)是将深度学习与Q学习结合起来的一种强化学习方法,利用神经网络来近似Q值函数,解决传统Q学习在大规模或连续状态空间中的局限性。下面详细解释DQN的机理。 背景知识 Q学习 Q学习是一种值函数法&…...

FPGA实现多路并行dds
目录 基本原理 verilog代码 仿真结果 基本原理 多路并行dds,传统DDS的局限性在于输出频率有限。根据奈奎斯特采样定理,单路DDS的输出频率应小于系统时钟频率的一半。但是在很多地方,要使采样率保持一致,所以,为了…...
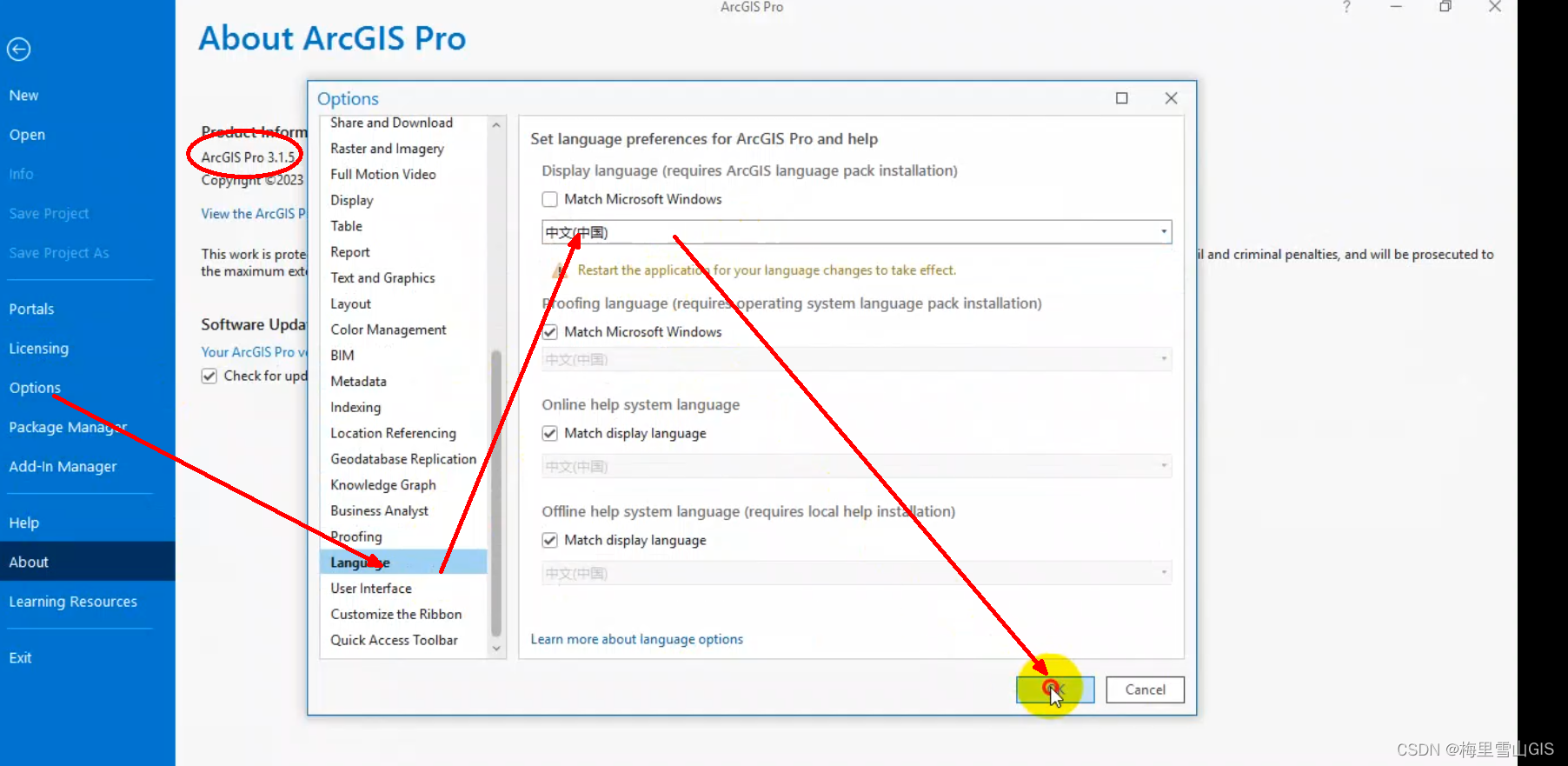
ArcgisPro3.1.5安装手册
ArcgisPro3.1.5安装手册 一、目录介绍: 二、安装教程: (1)安装顺序:最先安装运行环境(runtime6.0.5),接着安装install里面的文件,最后复制path里面的文件替换到软件bin文件夹下即可。 (2)具体安装步骤ÿ…...

三大主流框架
Web前端开发领域中,三大主流框架通常指的是: React:由Facebook开发的一个用于构建用户界面的JavaScript库。React以其组件化、声明式编程和虚拟DOM等特点而广受欢迎,能够高效地更新和渲染大型应用。 Vue.js:由尤雨溪创…...

【C++】:vector容器的底层模拟实现迭代器失效隐藏的浅拷贝
目录 💡前言一,构造函数1 . 强制编译器生成默认构造2 . 拷贝构造3. 用迭代器区间初始化4. 用n个val值构造5. initializer_list 的构造 二,析构函数三,关于迭代器四,有关数据个数与容量五,交换函数swap六&am…...
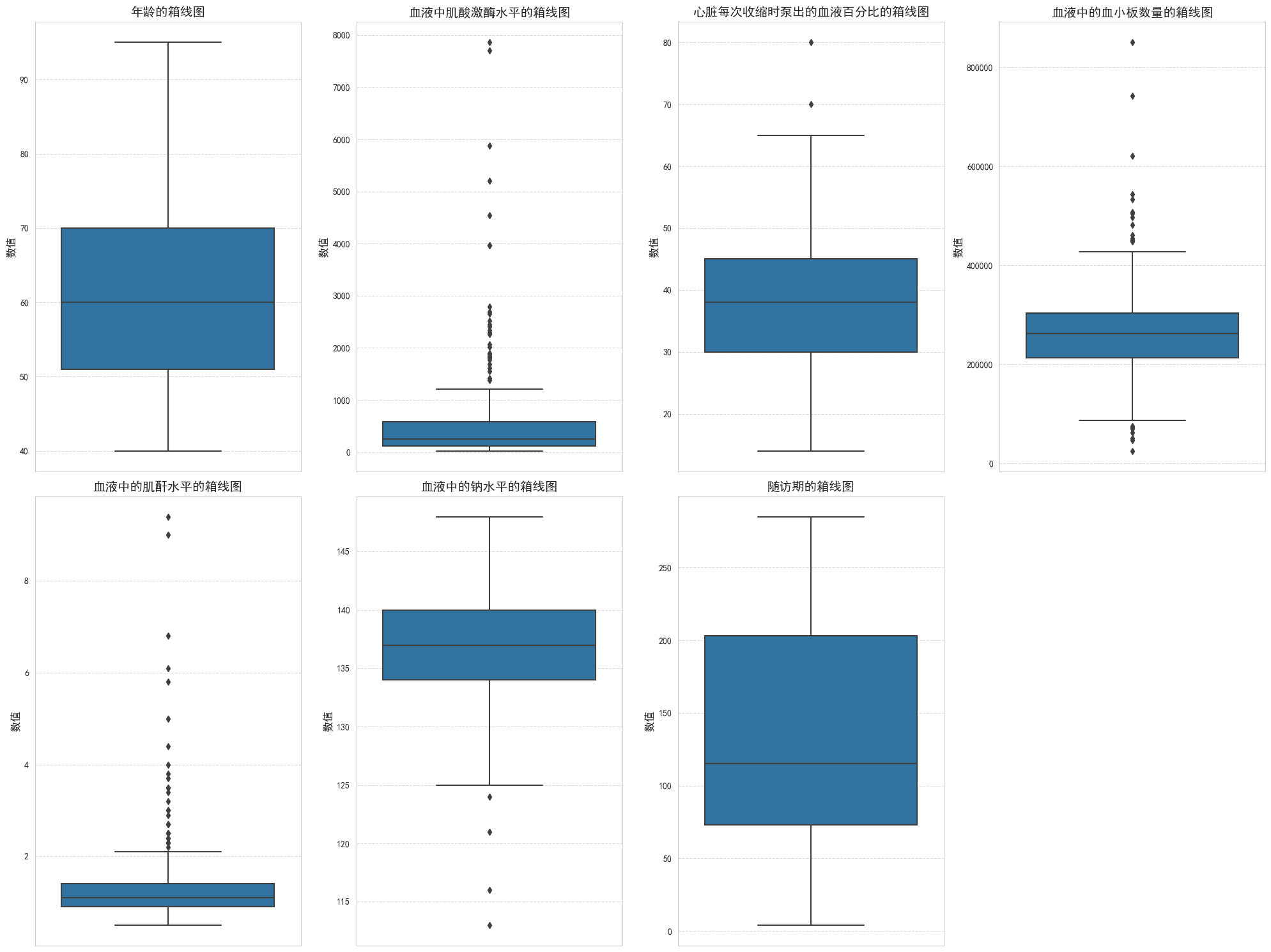
必看项目|多维度揭示心力衰竭患者生存关键因素(生存分析、统计检验、随机森林)
1.项目背景 心力衰竭是一种严重的公共卫生问题,影响着全球数百万人的生活质量和寿命,心力衰竭的病因复杂多样,既有个体生理因素的影响,也受到环境和社会因素的制约,个体的生活方式、饮食结构和医疗状况在很大程度上决定了其心力衰竭的风险。在现代社会,随着生活水平的提…...

centos安装Redis
在CentOS上安装Redis的步骤如下: 使用yum安装依赖库: sudo yum install -y gcc make 下载Redis源码: wget http://download.redis.io/releases/redis-6.0.9.tar.gz 解压Redis源码: tar xzf redis-6.0.9.tar.gz 编译Redis&…...

继承与多态2
2.5(杨.丹尼尔梁英文第11版P537:*13.12)(几何对象的面积求和)写一个方法,将数组中所有几何对象的面积求和。 方法签名是: 公共静态双求和区域(几何对象【】a) 编写一个测试程序&…...

在RT-Thread下为MPU手搓以太网MAC驱动-3
文章目录 MAC驱动支持不同的PHY芯片关于对PHY设备抽象的改进RT-Thread下PHY设备抽象接口的改进关于对PHY设备抽象的改进 这是个人驱动开发过程中做的一些记录,仅代表个人意见和理解,不喜勿喷 MAC驱动需要支持不同的PHY芯片 MAC驱动支持不同的PHY芯片 关…...

Cocos Creator 2D物理引擎的使用详解
前言 Cocos Creator是一款优秀的游戏开发工具,它提供了强大的2D物理引擎,帮助开发者轻松实现游戏中的物理效果。在本文中,我们将详细介绍Cocos Creator中2D物理引擎的使用方法,并通过代码实现来演示其具体应用。 对惹࿰…...

618局外人抖音:别人挤压商家“拼价格”,它默默联合商家“抢用户”?
文|新熔财经 作者|宏一 “618”来临之际,各电商平台和短视频平台早已打响了“促销大战”。不过,今年各大平台都更积极适应新的消费形式,调整了“大促动作”。 比如淘宝、京东带头取消了沿用十年之久的预售机制&…...

【Unity AR开发插件】五、运行示例程序
专栏 本专栏将介绍如何使用这个支持热更的AR开发插件,快速地开发AR应用。 链接: Unity开发AR系列 热更数据制作:制作热更数据-AR图片识别场景 插件简介 通过热更技术实现动态地加载AR场景,简化了AR开发流程,让用户可…...

JavaScript className 类名属性操作
在JavaScript中,可以通过className属性来操作HTML元素的类名。 添加类名:可以使用element.className "className"来添加一个类名到元素中。 var element document.getElementById("myElement"); element.className " newC…...

RIFE智能帧插值技术全解析:从原理到实战的视频流畅度提升指南
RIFE智能帧插值技术全解析:从原理到实战的视频流畅度提升指南 【免费下载链接】video2x A machine learning-based video super resolution and frame interpolation framework. Est. Hack the Valley II, 2018. 项目地址: https://gitcode.com/GitHub_Trending/v…...

r5:天气预测
- **🍨 本文为[🔗365天深度学习训练营](https://mp.weixin.qq.com/s/o-DaK6aQQLkJ8uE4YX1p3Q) 中的学习记录博客** - **🍖 原作者:[K同学啊](https://mtyjkh.blog.csdn.net/)** 文章目录 概要整体架构流程代码运行技术名词解释小…...

51单片机开发环境搭建指南:从Keil5安装到程序烧录全流程
1. 51单片机开发环境搭建全攻略 刚接触51单片机的朋友可能会被一堆陌生的名词搞懵——Keil5、CH340、HEX文件、烧录工具...别担心,我当初也是这样过来的。今天我就用最直白的语言,手把手带你搭建完整的开发环境。整个过程就像组装乐高积木,只…...

投资组合优化中的常见陷阱:如何用LINGO和MATLAB避免风险计算错误
投资组合优化中的常见陷阱:如何用LINGO和MATLAB避免风险计算错误 在金融投资领域,优化投资组合是实现收益最大化和风险最小化的关键手段。然而,许多金融分析师和量化投资爱好者在实际操作中常常陷入各种计算陷阱,导致结果偏离预期…...

intv_ai_mk11保姆级教程:解决页面打开但生成慢、服务启动失败等6类问题
intv_ai_mk11保姆级教程:解决页面打开但生成慢、服务启动失败等6类问题 1. 快速了解intv_ai_mk11 intv_ai_mk11是一个基于Llama架构的中等规模文本生成模型,特别适合处理通用问答、文本改写、解释说明和简短创作等任务。这个镜像已经完成了本地部署&am…...

避坑指南:雅特力AT32F403A V2库在Keil5中的常见配置错误及解决方法
雅特力AT32F403A V2库在Keil5中的高频配置问题与实战修复方案 当国产MCU逐渐成为嵌入式开发的新选择,雅特力AT32F403A凭借其出色的性价比获得了不少工程师的青睐。但在实际开发中,特别是在Keil5环境下使用V2库时,不少开发者都会遇到一些看似简…...

Beyond Compare 5 本地密钥生成实用方案:告别试用限制的完整指南
Beyond Compare 5 本地密钥生成实用方案:告别试用限制的完整指南 【免费下载链接】BCompare_Keygen Keygen for BCompare 5 项目地址: https://gitcode.com/gh_mirrors/bc/BCompare_Keygen Beyond Compare 5 作为一款专业的文件对比工具,在试用期…...

OpenSSL实战:从零构建私有CA体系及多级证书签发指南
1. 为什么需要私有CA体系? 在日常开发中,我们经常遇到需要HTTPS加密通信的场景。比如微服务之间的API调用、内部系统的数据传输、物联网设备的安全连接等。虽然可以使用公共CA机构颁发的证书,但在以下场景中,自建CA体系会更加灵活…...

xi-mac性能优化指南:7个技巧让你的编辑器运行如飞
xi-mac性能优化指南:7个技巧让你的编辑器运行如飞 【免费下载链接】xi-mac The xi-editor mac frontend. 项目地址: https://gitcode.com/gh_mirrors/xim/xi-mac xi-mac是一款基于Rust后端和Cocoa前端的现代文本编辑器,以其卓越的性能表现而闻名。…...

DDrawCompat:老游戏兼容性修复与性能优化终极解决方案
DDrawCompat:老游戏兼容性修复与性能优化终极解决方案 【免费下载链接】DDrawCompat DirectDraw and Direct3D 1-7 compatibility, performance and visual enhancements for Windows Vista, 7, 8, 10 and 11 项目地址: https://gitcode.com/gh_mirrors/dd/DDrawC…...