模糊C均值(FCM)算法更新公式推导
模糊C均值(FCM)算法更新公式推导
目标函数
FCM的目标函数为:
J m = ∑ i = 1 n ∑ j = 1 k u i j m ∥ x i − c j ∥ 2 J_m = \sum_{i=1}^n \sum_{j=1}^k u_{ij}^m \|x_i - c_j\|^2 Jm=i=1∑nj=1∑kuijm∥xi−cj∥2
其中:
- x i x_i xi 是数据点, i = 1 , 2 , … , n i = 1, 2, \ldots, n i=1,2,…,n。
- c j c_j cj 是第 j j j 个簇的中心, j = 1 , 2 , … , k j = 1, 2, \ldots, k j=1,2,…,k。
- u i j u_{ij} uij 是数据点 x i x_i xi 属于第 j j j 个簇的隶属度。
- m m m 是模糊度参数,通常 m > 1 m > 1 m>1。
更新公式推导过程
1. 定义目标函数
J m = ∑ i = 1 n ∑ j = 1 k u i j m ∥ x i − c j ∥ 2 J_m = \sum_{i=1}^n \sum_{j=1}^k u_{ij}^m \|x_i - c_j\|^2 Jm=i=1∑nj=1∑kuijm∥xi−cj∥2
2. 引入约束条件
∑ j = 1 k u i j = 1 ∀ i \sum_{j=1}^k u_{ij} = 1 \quad \forall i j=1∑kuij=1∀i
使用拉格朗日乘数法,引入拉格朗日乘子 λ i \lambda_i λi,构造拉格朗日函数:
L = ∑ i = 1 n ∑ j = 1 k u i j m ∥ x i − c j ∥ 2 + ∑ i = 1 n λ i ( ∑ j = 1 k u i j − 1 ) \mathcal{L} = \sum_{i=1}^n \sum_{j=1}^k u_{ij}^m \|x_i - c_j\|^2 + \sum_{i=1}^n \lambda_i \left( \sum_{j=1}^k u_{ij} - 1 \right) L=i=1∑nj=1∑kuijm∥xi−cj∥2+i=1∑nλi(j=1∑kuij−1)
3. 对 u i j u_{ij} uij 求偏导数并设为零
对拉格朗日函数 L \mathcal{L} L 求 u i j u_{ij} uij 的偏导数并设为零:
∂ L ∂ u i j = m u i j m − 1 ∥ x i − c j ∥ 2 + λ i = 0 \frac{\partial \mathcal{L}}{\partial u_{ij}} = m u_{ij}^{m-1} \|x_i - c_j\|^2 + \lambda_i = 0 ∂uij∂L=muijm−1∥xi−cj∥2+λi=0
解这个方程得到:
u i j m − 1 = − λ i m ∥ x i − c j ∥ 2 u_{ij}^{m-1} = -\frac{\lambda_i}{m \|x_i - c_j\|^2} uijm−1=−m∥xi−cj∥2λi
为了保证 (u_{ij}) 非负,设 λ i = − m ζ \lambda_i = -m\zeta λi=−mζ,则:
u i j m − 1 = ζ ∥ x i − c j ∥ 2 u_{ij}^{m-1} = \frac{\zeta}{\|x_i - c_j\|^2} uijm−1=∥xi−cj∥2ζ
即:
u i j = ( ζ ∥ x i − c j ∥ 2 ) 1 m − 1 u_{ij} = \left( \frac{\zeta}{\|x_i - c_j\|^2} \right)^{\frac{1}{m-1}} uij=(∥xi−cj∥2ζ)m−11
4. 求解拉格朗日乘子 ζ \zeta ζ
利用约束条件 ∑ j = 1 k u i j = 1 \sum_{j=1}^k u_{ij} = 1 ∑j=1kuij=1:
∑ j = 1 k ( ζ ∥ x i − c j ∥ 2 ) 1 m − 1 = 1 \sum_{j=1}^k \left( \frac{\zeta}{\|x_i - c_j\|^2} \right)^{\frac{1}{m-1}} = 1 j=1∑k(∥xi−cj∥2ζ)m−11=1
解这个方程得到:
ζ = ( ∑ j = 1 k ( 1 ∥ x i − c j ∥ 2 ) 1 m − 1 ) 1 − m \zeta = \left( \sum_{j=1}^k \left( \frac{1}{\|x_i - c_j\|^2} \right)^{\frac{1}{m-1}} \right)^{1-m} ζ=(j=1∑k(∥xi−cj∥21)m−11)1−m
代入 u i j u_{ij} uij 的表达式,得到隶属度更新公式:
u i j = 1 ∑ l = 1 k ( ∥ x i − c j ∥ ∥ x i − c l ∥ ) 2 m − 1 u_{ij} = \frac{1}{\sum_{l=1}^k \left( \frac{\|x_i - c_j\|}{\|x_i - c_l\|} \right)^{\frac{2}{m-1}}} uij=∑l=1k(∥xi−cl∥∥xi−cj∥)m−121
5. 对簇中心 c j c_j cj 求偏导数并设为零
对目标函数 J m J_m Jm 对 c j c_j cj 求偏导数并设为零:
∂ J m ∂ c j = ∑ i = 1 n u i j m ( c j − x i ) = 0 \frac{\partial J_m}{\partial c_j} = \sum_{i=1}^n u_{ij}^m (c_j - x_i) = 0 ∂cj∂Jm=i=1∑nuijm(cj−xi)=0
解这个方程得到:
∑ i = 1 n u i j m c j = ∑ i = 1 n u i j m x i \sum_{i=1}^n u_{ij}^m c_j = \sum_{i=1}^n u_{ij}^m x_i i=1∑nuijmcj=i=1∑nuijmxi
c j = ∑ i = 1 n u i j m x i ∑ i = 1 n u i j m c_j = \frac{\sum_{i=1}^n u_{ij}^m x_i}{\sum_{i=1}^n u_{ij}^m} cj=∑i=1nuijm∑i=1nuijmxi
总结
通过上述推导过程,我们得到了FCM算法的更新公式:
- 隶属度更新公式:
u i j = 1 ∑ l = 1 k ( ∥ x i − c j ∥ ∥ x i − c l ∥ ) 2 m − 1 u_{ij} = \frac{1}{\sum_{l=1}^k \left(\frac{\|x_i - c_j\|}{\|x_i - c_l\|}\right)^{\frac{2}{m-1}}} uij=∑l=1k(∥xi−cl∥∥xi−cj∥)m−121
- 簇中心更新公式:
c j = ∑ i = 1 n u i j m x i ∑ i = 1 n u i j m c_j = \frac{\sum_{i=1}^n u_{ij}^m x_i}{\sum_{i=1}^n u_{ij}^m} cj=∑i=1nuijm∑i=1nuijmxi
这些公式在每次迭代中交替更新,直到目标函数收敛。
相关文章:
算法更新公式推导)
模糊C均值(FCM)算法更新公式推导
模糊C均值(FCM)算法更新公式推导 目标函数 FCM的目标函数为: J m ∑ i 1 n ∑ j 1 k u i j m ∥ x i − c j ∥ 2 J_m \sum_{i1}^n \sum_{j1}^k u_{ij}^m \|x_i - c_j\|^2 Jmi1∑nj1∑kuijm∥xi−cj∥2 其中: …...

金融创新浪潮下的拆分盘投资探索
随着数字化时代的步伐加速,金融领域正经历着前所未有的变革。在众多金融创新中,拆分盘作为一种新兴的投资模式,以其独特的增长机制,吸引了投资者的广泛关注。本文将对拆分盘的投资逻辑进行深入剖析,并结合具体案例&…...
一份不知道哪里来的第十五届国赛模拟题
这是一个不知道来源的模拟题目,没有完全完成,只作代码记录,不作分析和展示,极其冗长,但里面有长按短按双击的复合,可以看看。 目录 题目代码底层驱动主程序核心代码关键:双击单击长按复合代码 …...
机器人动力学模型与MATLAB仿真
机器人刚体动力学由以下方程控制!!! startup_rvc mdl_puma560 p560.dyn 提前计算出来这些“disturbance”,然后在控制环路中将它“抵消”(有时候也叫前馈控制) 求出所需要的力矩,其中M项代表克服…...
SAPUI5基础知识3 - 引导过程(Bootstrap)
1. 背景 在上一篇博客中,我们已经建立出了第一个SAPUI5项目,接下来,我们将为这个项目添加引导过程。 在动手练习之前,让我们先解释一下什么引导过程。 1.1 什么是引导过程? 在计算机科学中,引导过程也称…...
ABAP 借助公司封装的钉钉URL,封装的RFC给钉钉发送消息
FUNCTION ZRFC_BC_SMSSEND_DINGTALK. *"---------------------------------------------------------------------- *"*"本地接口: *" IMPORTING *" VALUE(DESTUSRID) TYPE CHAR255 *" VALUE(CONTENT) TYPE CHAR255 *&quo…...

登录校验及全局异常处理器
登录校验 会话技术 会话:用户打开浏览器,访问web服务器的资源,会话建立,直到有一方断开连接,会话结束.在一次会话中可以包含多次请求和响应会话跟踪:一种维护浏览器状态的方法,服务器需要识别多次请求是否来自于同一浏览器,以便在同一次会话请求间共享数据会话跟踪方案 客户端…...
计算机视觉与模式识别实验1-2 图像的形态学操作
文章目录 🧡🧡实验流程🧡🧡1.图像膨胀2.图像腐蚀3.膨胀与腐蚀的综合使用4.对下面二值图像的目标提取骨架,并分析骨架结构。 🧡🧡全部代码🧡🧡 🧡🧡…...

【前端每日基础】day31——uni-app
uni-app 开发详细介绍 基本概念 uni-app:uni-app 是一个使用 Vue.js 开发多端应用的框架,可以编译到微信小程序、支付宝小程序、百度小程序、字节跳动小程序、H5、App等多个平台。 跨平台:一次开发,多端部署。通过条件编译实现多…...

云动态摘要 2024-05-31
给您带来云厂商的最新动态,最新产品资讯和最新优惠更新。 最新优惠与活动 [1.5折起]年中盛惠--AI分会场 腾讯云 2024-05-30 人脸核身、语音识别、文字识别、数智人、腾讯混元等热门AI产品特惠,1.5折起 云服务器ECS试用产品续用 阿里云 2024-04-14 云…...

Oracle数据块如何存储真实数据
上周休假了几天,颓废了,没有输出。今天写一点内容。 先抛出一个问题。表中的数据在Oracle数据块中是如何存储的呢?今天简单说一下这个问题。通常数据库中的表会存储字符,数字,日期 这3种常见的数据类型。下面的例子就用这3种数据类型作说明 首先,Oracle数据块底层存储这…...

【WEB前端2024】开源智体世界:乔布斯3D纪念馆-第30课-门的移动动画
【WEB前端2024】开源智体世界:乔布斯3D纪念馆-第30课-门的移动动画 使用dtns.network德塔世界(开源的智体世界引擎),策划和设计《乔布斯超大型的开源3D纪念馆》的系列教程。dtns.network是一款主要由JavaScript编写的智体世界引擎…...

智能化改造给企业带来的实际效果
1. 提高生产效率:通过自动化和智能化的生产线,减少人工操作,显著提升单位时间内的生产量。 2. 提升产品质量:智能化改造通过精确控制生产过程,减少人为错误,提高产品的一致性和可靠性。 3. 降低生产成本&am…...

深度学习-语言模型
深度学习-语言模型 统计语言模型神经网络语言模型语言模型的应用序列模型(Sequence Model)语言模型(Language Model)序列模型和语言模型的区别 语言模型(Language Model)是自然语言处理(NLP&…...

微型导轨在自动化制造中有哪些优势?
微型导轨在自动化制造中发挥重要作用,能够满足自动化设备制造中对精度要求较高的工艺环节。适用于自动装配线、自动检测设备和机器人操作等环节,推动了行业的进步与发展。那么,微型导轨在使用中有哪些优势呢? 1、精度高和稳定性强…...

探索气象数据的多维度三维可视化:PM2.5、风速与高度分析
探索气象数据的多维度可视化:PM2.5、风速与高度分析 摘要 在现代气象学中,数据可视化是理解复杂气象模式和趋势的关键工具。本文将介绍一种先进的数据可视化技术,它能够将PM2.5浓度、风速和高度等多维度数据以直观和动态的方式展现出来。 …...

【传知代码】双深度学习模型实现结直肠癌检测(论文复现)
前言:在医学领域,科技的进步一直是改变人类生活的关键驱动力之一。随着深度学习技术的不断发展,其在医学影像诊断领域的应用正日益受到关注。结直肠癌是一种常见但危害极大的恶性肿瘤,在早期发现和及时治疗方面具有重要意义。然而…...
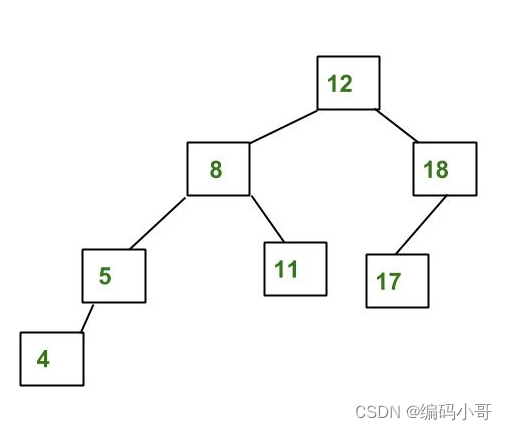
平衡二叉树的应用举例
AVL 是一种自平衡二叉搜索树,其中任何节点的左右子树的高度之差不能超过 1。 AVL树的特点: 1、它遵循二叉搜索树的一般属性。 2、树的每个子树都是平衡的,即左右子树的高度之差最多为1。 3、当插入新节点时,树会自我平衡。因此…...
一键安装 HaloDB 之 Ansible for Halo
↑ 关注“少安事务所”公众号,欢迎⭐收藏,不错过精彩内容~ 前倾回顾 前面介绍了“光环”数据库的基本情况和安装办法。 哈喽,国产数据库!Halo DB! 三步走,Halo DB 安装指引 以及 HaloDB 的 Oracle 和 MySQL 兼容模式: …...

el-table的上下筛选功能
el-table的sort-change事件可以监听到筛选的事件; 会返回prop属性和order排序的顺序; html: <el-table :data"tableData" border style"width: 100%" :cell-style"{ textAlign: center }"header-cell-c…...

VS Code Live Server完全指南:告别手动刷新,拥抱实时开发新时代
VS Code Live Server完全指南:告别手动刷新,拥抱实时开发新时代 【免费下载链接】vscode-live-server Launch a development local Server with live reload feature for static & dynamic pages. 项目地址: https://gitcode.com/gh_mirrors/vs/vs…...

3D打印印章模具全攻略:从数字设计到硅胶翻模的实践指南
1. 项目概述:当3D打印遇上传统印章艺术我一直对融合数字制造与传统手工艺的项目特别着迷,最近花了不少时间折腾用3D打印模具来制作定制印章,整个过程就像在数字世界和物理世界之间架起了一座桥。简单来说,这个项目的核心思路是&am…...

5个实用技巧:在Windows电脑上畅享酷安社区的最佳体验
5个实用技巧:在Windows电脑上畅享酷安社区的最佳体验 【免费下载链接】Coolapk-UWP 一个基于 UWP 平台的第三方酷安客户端 项目地址: https://gitcode.com/gh_mirrors/co/Coolapk-UWP 还在用手机小屏幕刷酷安吗?Coolapk UWP桌面版为你带来了全新的…...

基于ESP32-S2与MAX17048的物联网电池监控系统设计与实现
1. 项目概述与核心价值 对于任何一个需要长期部署在户外的物联网设备,比如环境监测站、智能农业传感器或者远程摄像头,最让人头疼的问题往往不是代码bug,而是“它什么时候会没电?”。你不可能天天跑现场去检查,而设备…...

别再只用高斯噪声了!手把手教你为DDPG算法注入‘惯性’:Ornstein-Uhlenbeck噪声的Python实现与调参实战
突破DDPG探索瓶颈:Ornstein-Uhlenbeck噪声的工程实践指南 在机器人控制或自动驾驶仿真这类连续动作空间的任务中,DDPG算法常因探索效率低下导致训练停滞。当智能体在MuJoCo环境中反复"原地踏步"时,问题往往不在于算法本身…...

FastAPI快速入门:环境搭建+第一个接口
FastAPI快速入门:环境搭建第一个接口文章信息 标题:FastAPI快速入门:环境搭建第一个接口字数:4200字预估阅读时间:18分钟难度:⭐☆☆☆☆一、为什么选择FastAPI? 在2026年的Python Web框架生态中…...

从理论到ONNX:手把手带你拆解pytorch_quantization量化YOLOv7的每一个Tensor变化
从理论到ONNX:手把手拆解YOLOv7量化中的Tensor演变 量化技术正在重塑计算机视觉模型的部署格局。当我们将YOLOv7这样的复杂检测模型从FP32压缩到INT8时,每一个卷积核、每一层激活值的细微变化都可能影响最终检测框的坐标精度。本文将以手术刀般的精确度&…...

稀疏三角求解器并行优化:GrowLocal算法解析
1. 稀疏三角求解器的并行调度挑战稀疏三角求解器(SpTRSV)是求解线性方程组$Lxb$或$Uxb$的核心算法,其中$L$和$U$分别是稀疏下三角和上三角矩阵。这类问题在科学计算、工程仿真和机器学习等领域有着广泛应用。然而,稀疏矩阵的非零元素分布不规则性导致其并…...

facebook-wda异常处理终极指南:如何优雅应对WDAError和元素不存在问题
facebook-wda异常处理终极指南:如何优雅应对WDAError和元素不存在问题 【免费下载链接】facebook-wda Facebook WebDriverAgent Python Client Library (not official) 项目地址: https://gitcode.com/gh_mirrors/fa/facebook-wda 在iOS自动化测试中…...

taskwarrior-tui键盘绑定完全手册:成为效率达人的秘密武器
taskwarrior-tui键盘绑定完全手册:成为效率达人的秘密武器 【免费下载链接】taskwarrior-tui taskwarrior-tui: A terminal user interface for taskwarrior 项目地址: https://gitcode.com/gh_mirrors/ta/taskwarrior-tui taskwarrior-tui是一款功能强大的终…...