香橙派 AIpro上手体验并验证车道线识别算法
香橙派 AIpro上手体验并验证车道线识别算法
1.前言
最近入手了一块香橙派AIpro,体验了一下,感觉还不错,在这里分享给大家,大家可以做个参考。
2.开箱

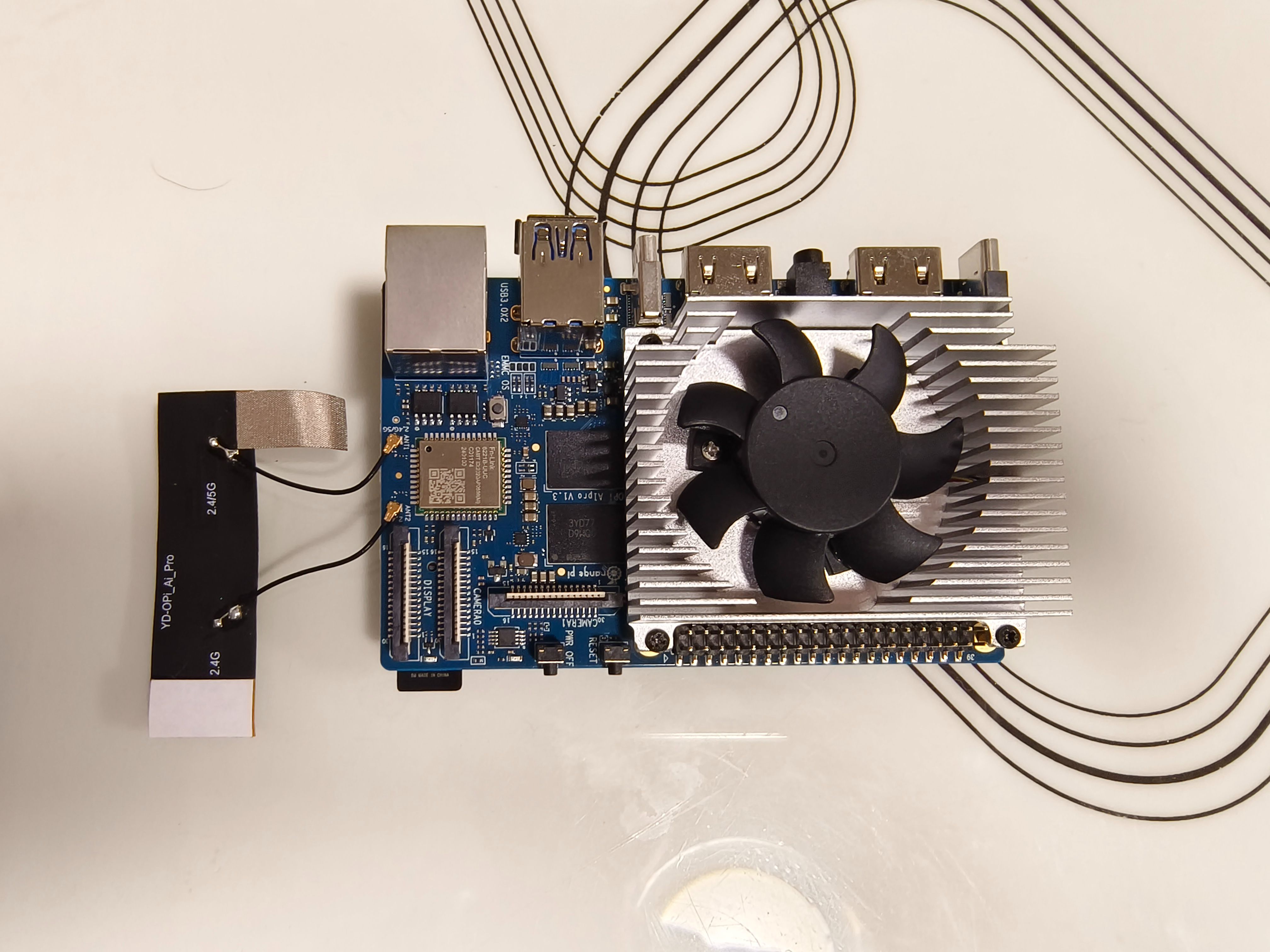
整套产品包含一块主板、一个电源插头和一条双端Type-C的数据线,打开盒子可以看到主板,主板前后都有海绵保护,包装得还可以:

主板上已经装好了散热器,焊好了天线,这里注意下上电时天线上的导电胶带不要和板子接触,以免造成板子元器件短路:
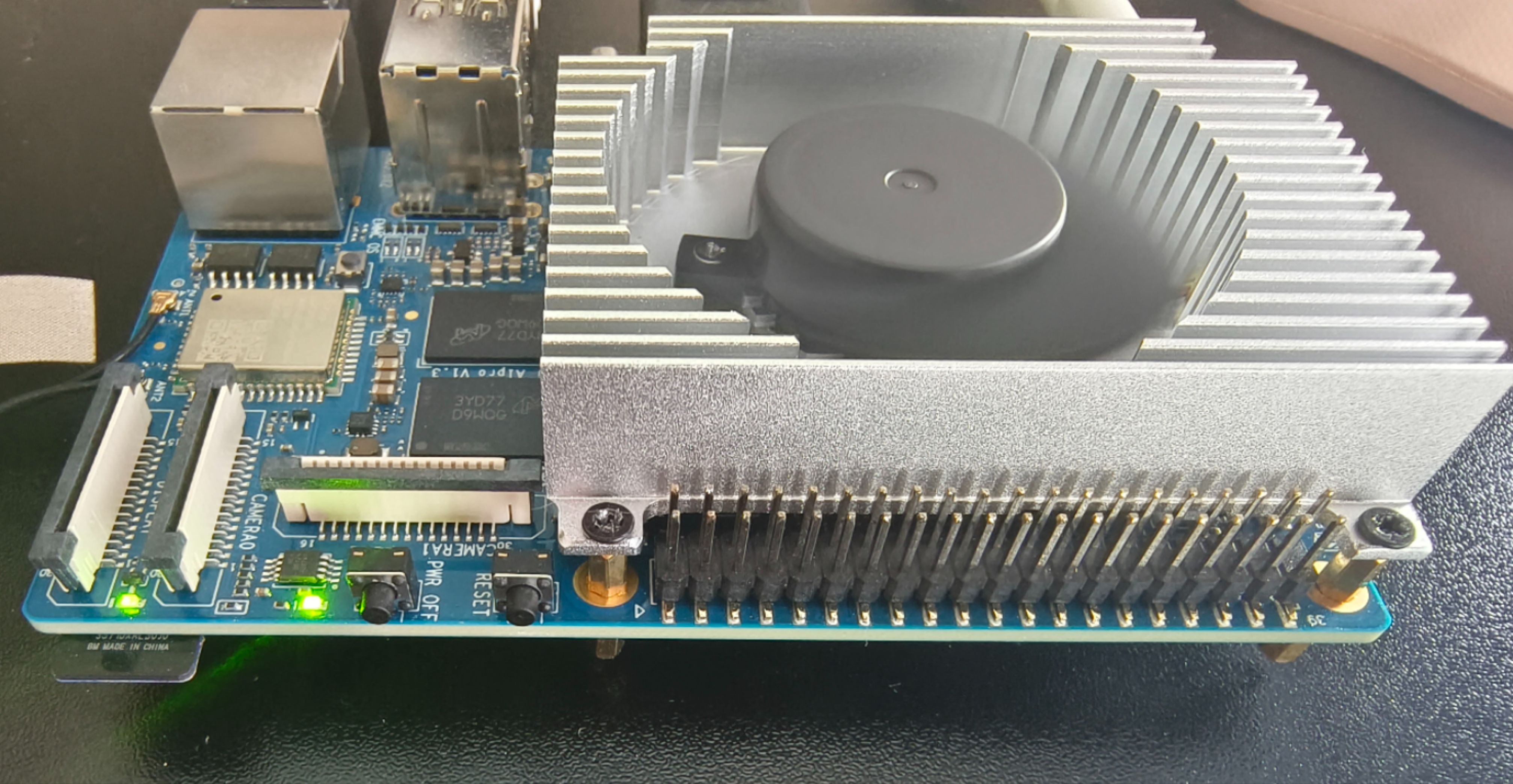
主板侧面有一个Typc-C供电口,两个HDMI显示输出口,中间有个音频接口,再右边是一个Type-C接口,这个Type-C接口只支持USB3.0的设备,也就是说USB2.0和1.0的鼠标或键盘等设备是不能接到这个这个接口的,鼠标和键盘要用右边的两个USB接口。但这个Type-C接口可以接USB3.0的移动硬盘之类设备。最右边还有一个千兆以太网口。

板子另一侧有一排40pin的GPIO,两个Key,一个是关机键,一个是重启键。还有两个LED指示灯,靠近关机键的那个LED是电源指示灯,接上电源就亮,左边那个LED可以用程序控制,默认是Linux内核跑起来之后会点亮,系统关闭后熄灭。
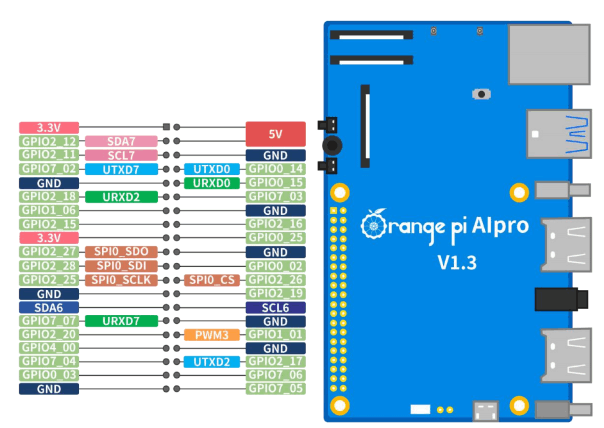
40pin GPIO的定义如下,包含一路SPI、一路IIC、三路UART和一路PWM输出,其余引脚已经默认配置为GPIO模式,可以直接使用,有复用功能的引脚需要修改 DTS 配置才能作为GPIO使用。
下图是主机背面的样子,来的时候带了一张32G内存卡,此外还可以看到两个拨码开关,可以用来选择启动方式,支持SSD、EMMC和SD三种启动方式。

其他的还有MIPI摄像头等接口,这里就不一一列举了,需要的话可以再使用手册中查找相关说明。
3.开机
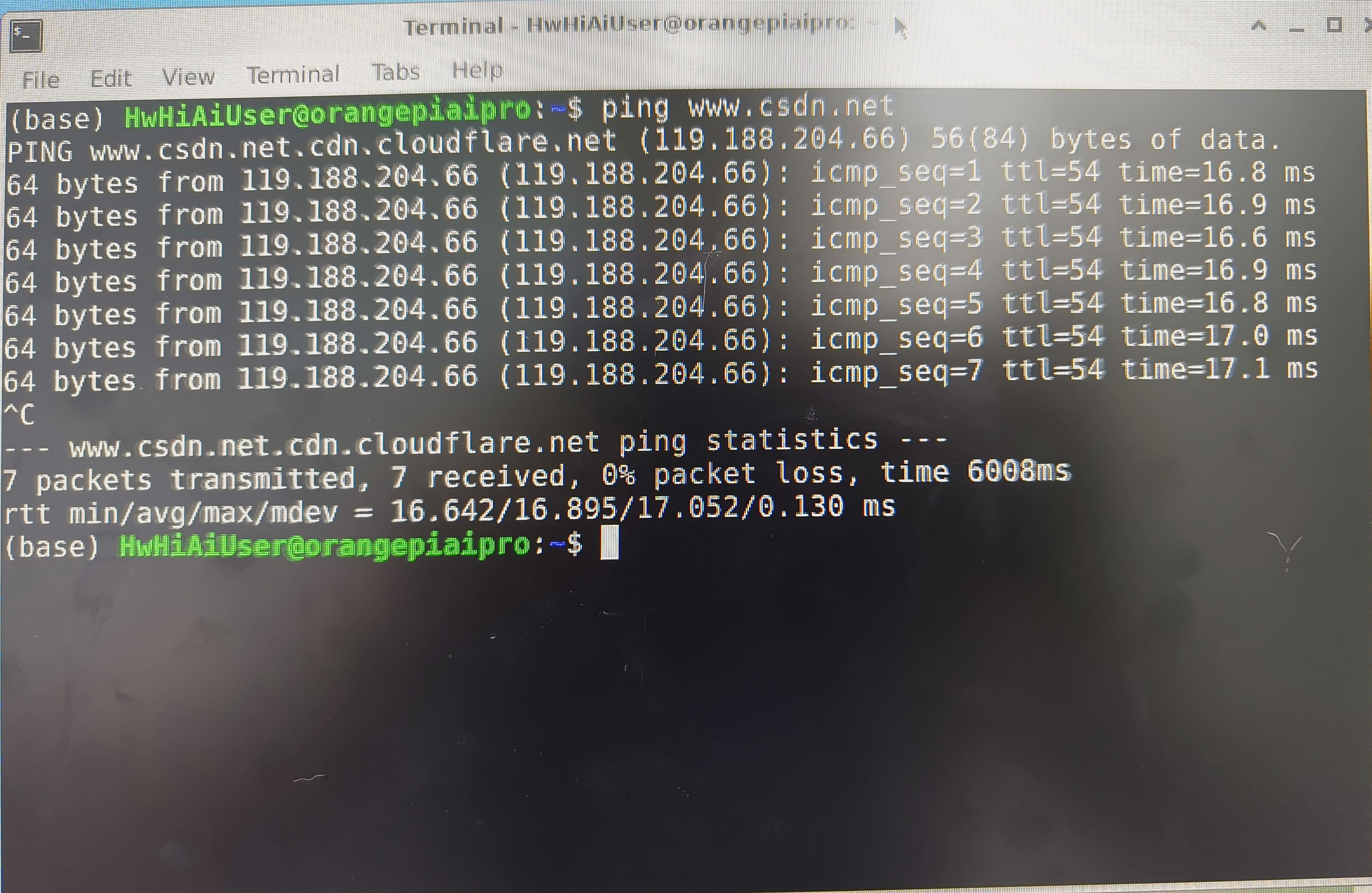
插上电源后自动开机,注意显示器要插到HDMI0接口,也就是靠近USB的那个,目前只有HDMI0支持显示系统桌面。出厂默认安装Ubuntu系统,支持Xface桌面,这默认用户名是HwHiAiUser,默认密码是Mind@123:

登录之后,先试一下联网,有线网直接插上就可以自动识别连接,WIFI也可以正常连接,ping一下看是否能正常联网:
4.系统自带算法模型
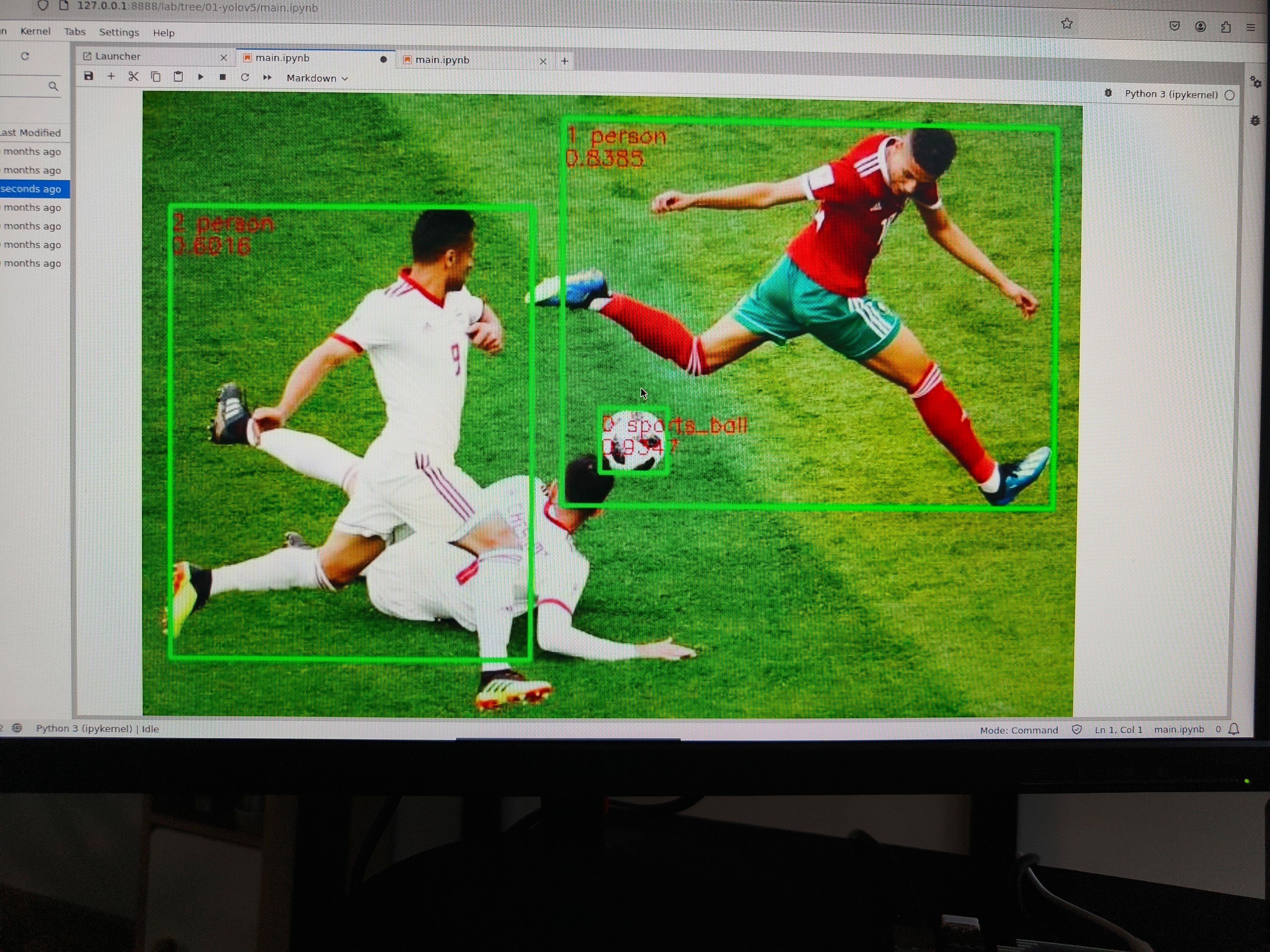
出产时预装的系统中,自带了几个常见的算法模型样例,有目标识别、语音识别等等,是基于JupyterLab做的,具体怎么使用样例可以参考用户手册,这里就不详细展开讲了,我们这里来测试一下第一个目标识别算法样例,首先测试一下图片,图片是样例自带的,结果如下:
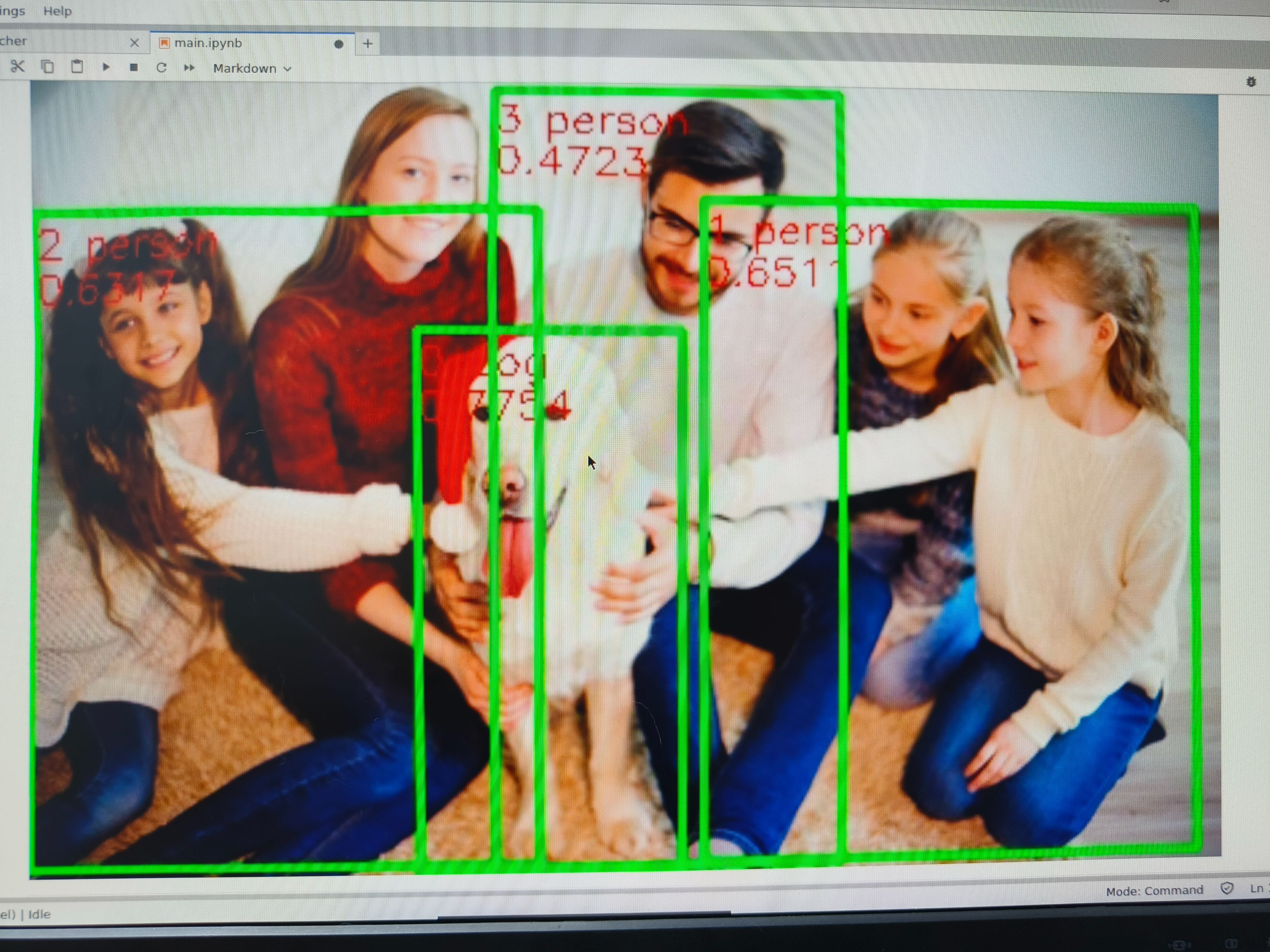
我们再去网上随便找一张图片试试效果:
5.车道线识别算法测试
我们再自己做个小算法测试一下。车道线检测是自动驾驶或辅助驾驶中的一个基本算法,检测到车道线后才可能实现车道偏离预警、车道保持辅助以及更高级别的领航辅助等功能。算法的原理和实现网上都能找到不少资料,这里不再赘述。测试使用的算法代码如下:
blur_ksize = 5 # 高斯模糊核大小
canny_lthreshold = 50 # Canny边缘检测低阈值
canny_hthreshold = 150 # Canny边缘检测高阈值
# 霍夫变换参数
rho = 1 #rho的步长,即直线到图像原点(0,0)点的距离
theta = np.pi / 180 #theta的范围
threshold = 15 #累加器中的值高于它时才认为是一条直线
min_line_length = 40 #线的最短长度,比这个短的都被忽略
max_line_gap = 20 #两条直线之间的最大间隔,小于此值,认为是一条直线#img是输入的图像,verticess是兴趣区的四个点的坐标(三维的数组)
def roi_mask(img, vertices):mask = np.zeros_like(img) #生成与输入图像相同大小的图像,并使用0填充,图像为黑色mask_color = 255cv2.fillPoly(mask, vertices, mask_color) #使用白色填充多边形,形成蒙板masked_img = cv2.bitwise_and(img, mask) #img&mask,经过此操作后,兴趣区域以外的部分被蒙住了,只留下兴趣区域的图像return masked_img
# 对图像进行画线
def draw_lines(img, lines, color=[255, 255, 0], thickness=2):for line in lines:for x1, y1, x2, y2 in line:cv2.line(img, (x1, y1), (x2, y2), color, thickness)
def hough_lines(img, rho, theta, threshold,min_line_len, max_line_gap):lines = cv2.HoughLinesP(img, rho, theta, threshold, np.array([]),minLineLength=min_line_len,maxLineGap=max_line_gap)line_img = np.zeros((img.shape[0], img.shape[1], 3), dtype=np.uint8) #生成绘制直线的绘图板,黑底# draw_lines(line_img, lines)draw_lanes(line_img, lines)return line_img
def draw_lanes(img, lines, color=[255, 255, 0], thickness=8):left_lines, right_lines = [], [] #用于存储左边和右边的直线for line in lines: #对直线进行分类for x1, y1, x2, y2 in line:k = (y2 - y1) / (x2 - x1)if k < 0:left_lines.append(line)else:right_lines.append(line)if (len(left_lines) <= 0 or len(right_lines) <= 0):return imgclean_lines(left_lines, 0.1) #弹出左侧不满足斜率要求的直线clean_lines(right_lines, 0.1) #弹出右侧不满足斜率要求的直线left_points = [(x1, y1) for line in left_lines for x1, y1, x2, y2 in line] #提取左侧直线族中的所有的第一个点left_points = left_points + [(x2, y2) for line in left_lines for x1, y1, x2, y2 in line] #提取左侧直线族中的所有的第二个点right_points = [(x1, y1) for line in right_lines for x1, y1, x2, y2 in line] #提取右侧直线族中的所有的第一个点right_points = right_points + [(x2, y2) for line in right_lines for x1, y1, x2, y2 in line] #提取右侧侧直线族中的所有的第二个点left_vtx = calc_lane_vertices(left_points, 325, img.shape[0]) #拟合点集,生成直线表达式,并计算左侧直线在图像中的两个端点的坐标right_vtx = calc_lane_vertices(right_points, 325, img.shape[0]) #拟合点集,生成直线表达式,并计算右侧直线在图像中的两个端点的坐标cv2.line(img, left_vtx[0], left_vtx[1], color, thickness) #画出左侧直线cv2.line(img, right_vtx[0], right_vtx[1], color, thickness) #画出右侧直线#将不满足斜率要求的直线弹出
def clean_lines(lines, threshold):slope = [(y2 - y1) / (x2 - x1) for line in lines for x1, y1, x2, y2 in line]while len(lines) > 0:mean = np.mean(slope) #计算斜率的平均值,因为后面会将直线和斜率值弹出diff = [abs(s - mean) for s in slope] #计算每条直线斜率与平均值的差值idx = np.argmax(diff) #计算差值的最大值的下标if diff[idx] > threshold: #将差值大于阈值的直线弹出slope.pop(idx) #弹出斜率lines.pop(idx) #弹出直线else:break
#拟合点集,生成直线表达式,并计算直线在图像中的两个端点的坐标
def calc_lane_vertices(point_list, ymin, ymax):x = [p[0] for p in point_list] #提取xy = [p[1] for p in point_list] #提取yfit = np.polyfit(y, x, 1) #用一次多项式x=a*y+b拟合这些点,fit是(a,b)fit_fn = np.poly1d(fit) #生成多项式对象a*y+bxmin = int(fit_fn(ymin)) #计算这条直线在图像中最左侧的横坐标xmax = int(fit_fn(ymax)) #计算这条直线在图像中最右侧的横坐标return [(xmin, ymin), (xmax, ymax)]cap = cv2.VideoCapture('lane.jpg')if (cap.isOpened()): # 打开成功flag = 1
else:flag = 0
num = 0
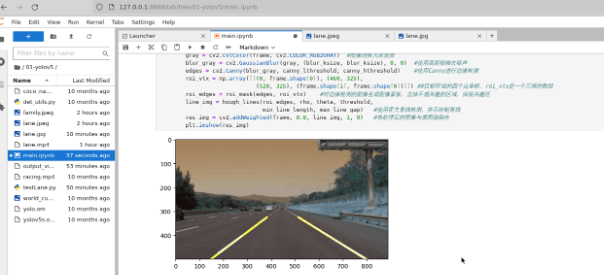
if (flag):while (True):ret,frame = cap.read() if ret == False:breakplt.imshow(frame)gray = cv2.cvtColor(frame, cv2.COLOR_RGB2GRAY) #图像转换为灰度图blur_gray = cv2.GaussianBlur(gray, (blur_ksize, blur_ksize), 0, 0) #使用高斯模糊去噪声edges = cv2.Canny(blur_gray, canny_lthreshold, canny_hthreshold) #使用Canny进行边缘检测roi_vtx = np.array([[(0, frame.shape[0]), (460, 325),(520, 325), (frame.shape[1], frame.shape[0])]]) ##目标区域的四个点坐标,roi_vtx是一个三维的数组roi_edges = roi_mask(edges, roi_vtx) #对边缘检测的图像生成图像蒙板,去掉不感兴趣的区域,保留兴趣区line_img = hough_lines(roi_edges, rho, theta, threshold,min_line_length, max_line_gap) #使用霍夫直线检测,并且绘制直线res_img = cv2.addWeighted(frame, 0.8, line_img, 1, 0) #将处理后的图像与原图做融合plt.imshow(res_img)测试使用的输入图片如下:

运行后的结果如下图所示,我们可以看到车道线被用黄色线标记了出来:
当前只是实现了图片中的车道线检测,后续会继续实现视频中的车道线检测,因为时间的原因目前只能测试这么多,后面会实现更多的算法来进行测试。
6.总结
我其实主业是做MCU的,SOC之前用的并不多,所以这次体验地也比较粗浅,但仍然能感觉到这块开发板对于我这种小白来说是非常容易上手的,拿到手之后就已经给装好了系统,开机即用,官方提供的使用手册也很详细,按照手册很快就能在板子上验证自己的算法。板载接口也很丰富,两个HDMI接口、Type-C、有线网口、无线天线等等一应俱全,可以满足日常使用的绝大部分需求。美中不足的可能是官方系统目前还不能支持双屏桌面输出,期待日后够完善。之前买过一块树莓派,对比下来感觉香橙派AIpro更“亲民”,不只是在价格,更是在一些小的细节上,比如板载的两个标准HDMI接口就比树莓派的两个Mini HDMI更符合我们日常的使用习惯,省去了转接头的麻烦。虽然说目前网上能找到的各种资料还是树莓派相对多一些,但毕竟他们起步早,我们现在也有昇腾社区和论坛,相信在不久的将来国产AI芯片也一定能闯出一片自己的天地!
相关文章:
香橙派 AIpro上手体验并验证车道线识别算法
香橙派 AIpro上手体验并验证车道线识别算法 1.前言 最近入手了一块香橙派AIpro,体验了一下,感觉还不错,在这里分享给大家,大家可以做个参考。 2.开箱 整套产品包含一块主板、一个电源插头和一条双端Type-C的数据线,…...

为啥装了erlang,还报错erl: command not found?
转载说明:如果您喜欢这篇文章并打算转载它,请私信作者取得授权。感谢您喜爱本文,请文明转载,谢谢。 问题背景: 在一台不通外网的服务器上装rabbitmq,然后在启动的时候,遇到了报错 “/usr/lib/…...
容器技术基础理论与常用命令:必知必会,效率翻倍!
如何利用容器技术提升你的工作效率?掌握基础理论和常用命令是必不可少的,本文将为你全面介绍容器技术,并教你必知必会的技能,让你工作、学习效率翻倍,对于网络安全工作者也是必不可少的技能! 0. 引言 学习…...

ChatGPT Edu版本来啦:支持GPT-4o、自定义GPT、数据分析等
5月31日,OpenAI在官网宣布,推出ChatGPT Edu版本。 据悉,这是一个专门为大学校园提供的ChatGTP,支持GPT-4o、网络搜索、自定义GPT、数据分析、代码生成等功能,可以极大提升学生、老师的学习质量和教学效率。 目前&…...

Spark RDD案例
Apache Spark中的RDD(Resilient Distributed Dataset)是一个不可变、分布式对象集合,它允许用户在大型集群上执行并行操作。虽然RDD在Spark的早期版本中非常核心,但随着DataFrame和Dataset的引入,RDD的使用在某些场景下…...

【线性表 - 数组和矩阵】
数组是一种连续存储线性结构,元素类型相同,大小相等,数组是多维的,通过使用整型索引值来访问他们的元素,数组尺寸不能改变。 知识点数组与矩阵相关题目 # 知识点 数组的优点: 存取速度快 数组的缺点: 事先必须知道…...

Springboot 开发 -- 跨域问题技术详解
一、跨域的概念 跨域访问问题指的是在客户端浏览器中,由于安全策略的限制,不允许从一个源(域名、协议、端口)直接访问另一个源的资源。当浏览器发起一个跨域请求时,会被浏览器拦截,并阻止数据的传输。 这…...
)
【Qt】之【项目】整理可参考学习的git项目链接(持续更新)
Tcp 通信相关 IM即时通讯设计 高并发聊天服务:服务器 qt客户端(附源码) - DeRoy - 博客园 未使用protobuf通讯协议格式 github:GitHub - ADeRoy/chat_room: IM即时通讯设计 高并发聊天服务:服务器 qt客户端 QT编…...

2024年5月个人工作生活总结
本文为 2024年5月工作生活总结。 研发编码 golang 多个defer函数执行顺序 golang 函数中如有多个defer,倒序执行。示例代码: func foo() {defer func() {fmt.Println("111")}()defer func() {fmt.Println("2222")}()defer func()…...
Kafka Java API
1、增加依赖 <dependency><groupId>org.apache.kafka</groupId><artifactId>kafka-clients</artifactId><version>1.0.0</version> </dependency>2、三个案例 案例1:生产数据 import org.apache.kafka.clients.p…...

pushd: not found
解决方法: pushd 比 cd 命令更高效的切换命令,非默认,可在脚本开头添加: #! /bin/bash ubuntu 编译时出现/bin/sh: 1: pushd: not found的问题-CSDN博客...
【第十三节】C++控制台版本坦克大战小游戏
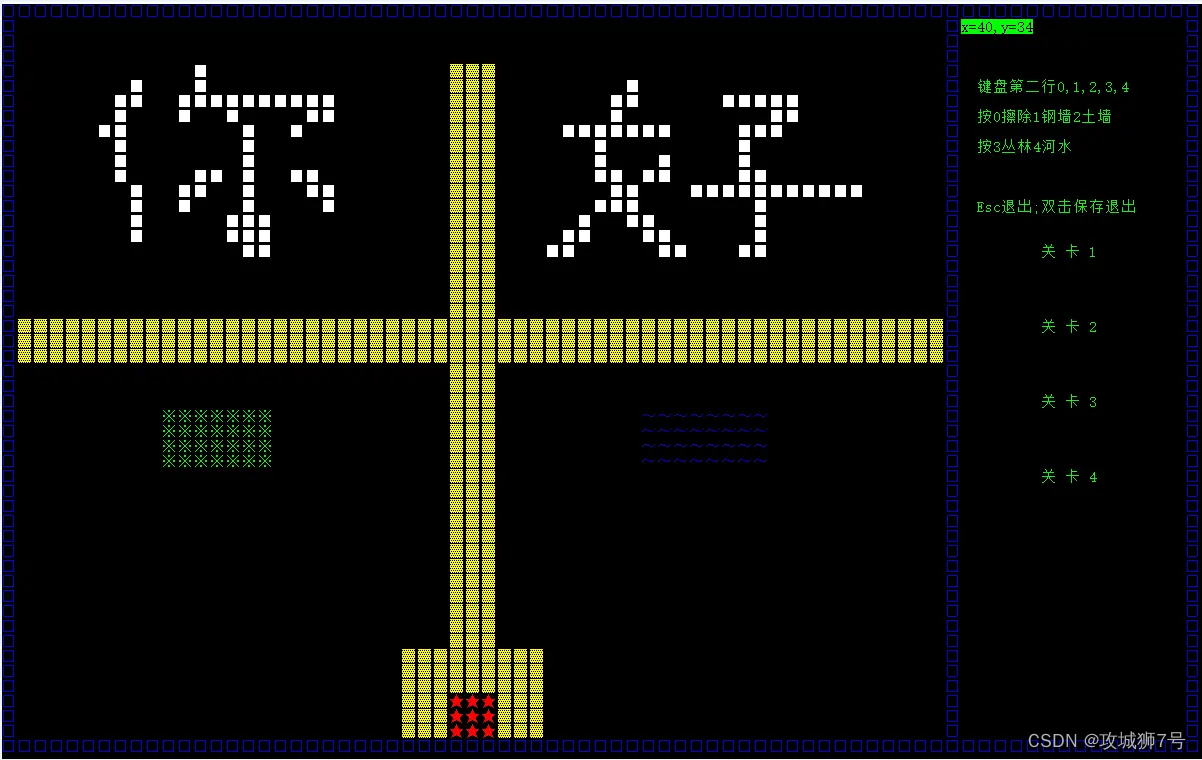
目录 一、游戏简介 1.1 游戏概述 1.2 知识点应用 1.3 实现功能 1.4 开发环境 二、项目设计 2.1 类的设计 2.2 各类功能 三、程序运行截图 3.1 游戏主菜单 3.2 游戏进行中 3.3 双人作战 3.4 编辑地图 一、游戏简介 1.1 游戏概述 本项目是一款基于C语言开发的控制台…...
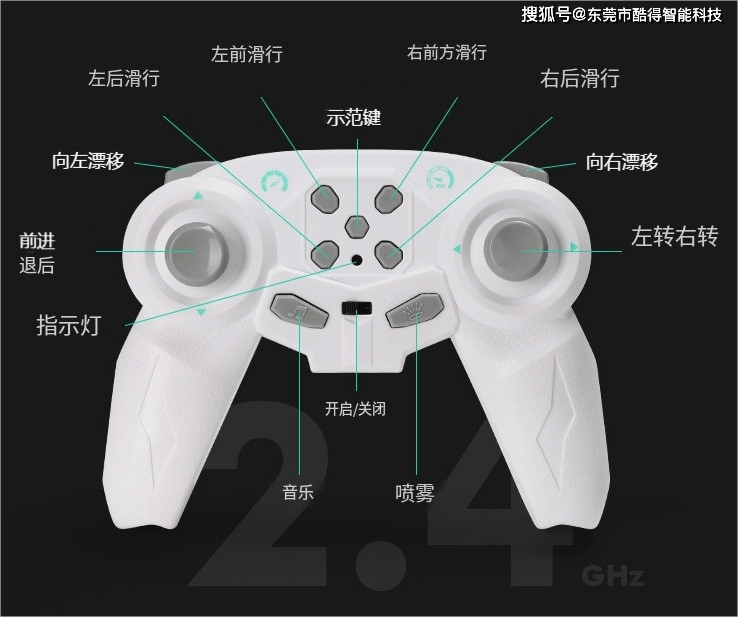
酷得单片机方案 2.4G儿童遥控漂移车
电子方案开发定制,我们是专业的 东莞酷得智能单片机方案之2.4G遥控玩具童车具有以下比较有特色的特点: 1、内置充电电池:这款小车配备了可充电的电池,无需频繁更换电池,既环保又方便。充电方式可能为USB充电或者专用…...

【为什么 Google Chrome 打开网页有时极慢?尤其是国内网站,如知网等】
要通过知网搜一点资料,发现怎么都打不开。而且B站,知乎这些速度也变慢了!已经检查过确定不是网络的问题。 清空了记录,清空了已接受Cookie,清空了缓存内容……没用!!! 不断搜索&am…...

FastAPI - 数据库操作5
先安装mysql驱动程序 pipenv install pymysql安装数据库ORM库SQLAlchemy pipenv install SQLAlchemy修改文件main.py文件内容 设置数据库连接 # -*- coding:utf-8 –*- from fastapi import FastAPIfrom sqlalchemy import create_engineHOST 192.168.123.228 PORT 3306 …...

HTML静态网页成品作业(HTML+CSS)—— 冶金工程专业展望与介绍介绍网页(2个页面)
🎉不定期分享源码,关注不丢失哦 文章目录 一、作品介绍二、作品演示三、代码目录四、网站代码HTML部分代码 五、源码获取 一、作品介绍 🏷️本套采用HTMLCSS,未使用Javacsript代码,共有2个页面。 二、作品演示 三、代…...

Flutter基础 -- Dart 语言 -- 注释函数表达式
目录 1. 注释 1.1 单行注释 1.2 多行注释 1.3 文档注释 2. 函数 2.1 定义 2.2 可选参数 2.3 可选参数 默认值 2.4 命名参数 默认值 2.5 函数内定义 2.6 Funcation 返回函数对象 2.7 匿名函数 2.8 作用域 3. 操作符 3.1 操作符表 3.2 算术操作符 3.3 相等相关的…...
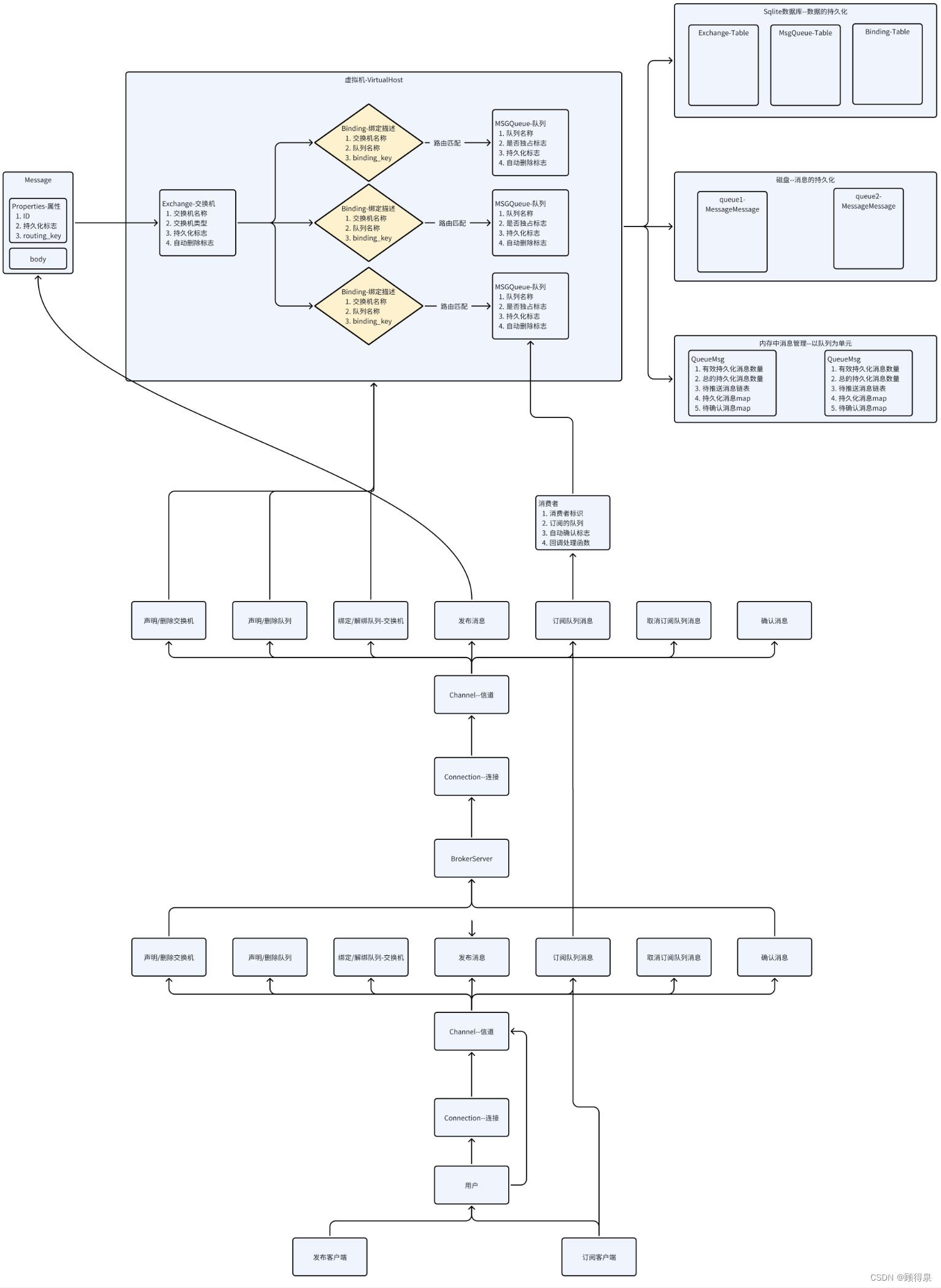
“仿RabbitMQ实现消息队列”---整体架构与模块说明
顾得泉:个人主页 个人专栏:《Linux操作系统》 《C从入门到精通》 《LeedCode刷题》 键盘敲烂,年薪百万! 一、概念性框架理解 我们主要实现的内容: 1.Broker服务器:消息队列服务器(服务端&…...

springboot如何快速接入minio对象存储
1.在项目中添加 Minio 的依赖,在使用 Minio 之前,需要在项目中添加 Minio 的依赖。可以在 Maven 的 pom.xml 文件中添加以下依赖: <dependency><groupId>io.minio</groupId><artifactId>minio</artifactId>&l…...

第六届“智能设计+运维”国产工业软件研讨会暨2024年天洑软件用户大会圆满召开
2024年5月23-24日,第六届“智能设计运维”国产工业软件研讨会暨2024年天洑软件用户大会在南京举办。来自国产工业软件研发企业、制造业企业、高校、科研院所的业内大咖,能源动力、船舶海事、车辆运载、航空航天、新能源汽车、动力电池、消费电子、石油石…...

为内部工具集成AI能力时选择Taotoken作为统一接口层
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为内部工具集成AI能力时选择Taotoken作为统一接口层 当企业开发团队着手为多个内部系统,例如客户关系管理(…...

RocketMQ 5.1.1 Topic管理:从创建到删除,一份完整的mqadmin命令行实战手册
RocketMQ 5.1.1 Topic全生命周期管理实战指南 接手一个新的RocketMQ集群时,Topic管理往往是日常运维中最频繁的操作之一。不同于简单的命令堆砌,本文将带您深入理解Topic从创建到销毁的完整生命周期,通过真实生产环境中的典型场景,…...

DIY蓝牙街机摇杆:从零打造无线复古游戏控制器
1. 项目概述与核心思路作为一个玩了二十多年街机,也折腾了十几年硬件的“老炮儿”,我始终觉得,有些东西的味道是数字模拟不出来的。比如,用键盘或现代手柄玩《拳皇97》或《合金弹头》,总觉得少了点灵魂——那“咔哒咔哒…...

赣州 GEO 科普|AI 时代品牌信息基建,七文 GEO 助力品牌长效可见
赣州GEO科普|AI时代品牌信息基建,读懂生成式引擎优化逻辑人工智能全面普及的当下,生成式AI正在重塑大众的信息获取方式。如今多数用户习惯借助文心一言等AI工具检索品牌、查询行业服务,人工智能会整合全网信息进行智能作答。在此行…...
直接拿来用)
别再折腾了!我整理好的Elsevier LaTeX模板(通用版+复杂版)直接拿来用
Elsevier LaTeX模板终极避坑指南:从编译报错到一键投稿 第一次打开Elsevier官方LaTeX模板时,我盯着满屏的报错信息足足愣了五分钟——作为一个刚踏入科研领域的研究生,这简直像在解一道没有提示的数学证明题。经过三个月的反复试错和数十次期…...

忘记压缩包密码怎么办?5分钟学会用ArchivePasswordTestTool找回密码
忘记压缩包密码怎么办?5分钟学会用ArchivePasswordTestTool找回密码 【免费下载链接】ArchivePasswordTestTool 利用7zip测试压缩包的功能 对加密压缩包进行自动化测试密码 项目地址: https://gitcode.com/gh_mirrors/ar/ArchivePasswordTestTool 你是否曾经…...

【数字孪生实战案例】三维场景中怎样点击飞线,唤起弹窗并加载匹配的关联数据?~山海鲸可视化
在三维数据可视化场景中,飞线常用于呈现跨区域业务关联与流转关系。为增强交互体验与数据可读性,需实现点击飞线触发弹窗,并精准加载匹配的关联数据,让用户可实时查看单条飞线对应的业务信息,提升三维场景的数据交互与…...

山东反向旅游推荐“小众秘境古村落”
假期不想挤热门景区,只想寻一处安静古村放空散心?给大家整理山东4 个小众秘境古村落,全程 1-2.5 小时车程,适合近郊自驾、短途出游,原生态氛围拉满,人少景美超适合避峰出行。一、济南长清|方峪古…...

【c++面向对象编程】第22篇:输入输出运算符重载:<< 与 >> 的友元实现
目录 一、为什么不能是成员函数? 二、标准写法(两步法) 第1步:在类中声明友元函数 第2步:实现全局函数 三、为什么要返回引用? 支持链式输出 正确 vs 错误示例 四、为什么需要友元?能否不…...

英雄联盟Akari助手:免费开源的终极游戏效率工具完整指南
英雄联盟Akari助手:免费开源的终极游戏效率工具完整指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 还在为英雄联盟中繁琐的配…...