【三维点云】01-激光雷达原理与应用
文章目录
- 内容概要
- 1 激光雷达原理
- 1.1 什么是激光雷达?
- 1.2 激光雷达原理
- 1.3 激光雷达分类
- 三角法
- TOF法
- 脉冲间隔测量法
- 幅度调制的相位测量法
- 相干法
- 激光雷达用途
- 2 激光雷达安装、标定与同步
- 2.1 激光雷达安装方式
- 考虑因素
- 2.2 激光雷达点云用途
- 2.3 数据融合
- 多激光雷达数据融合
- 多传感器数据融合
- 2.4 激光雷达系统方案
- 硬件部分
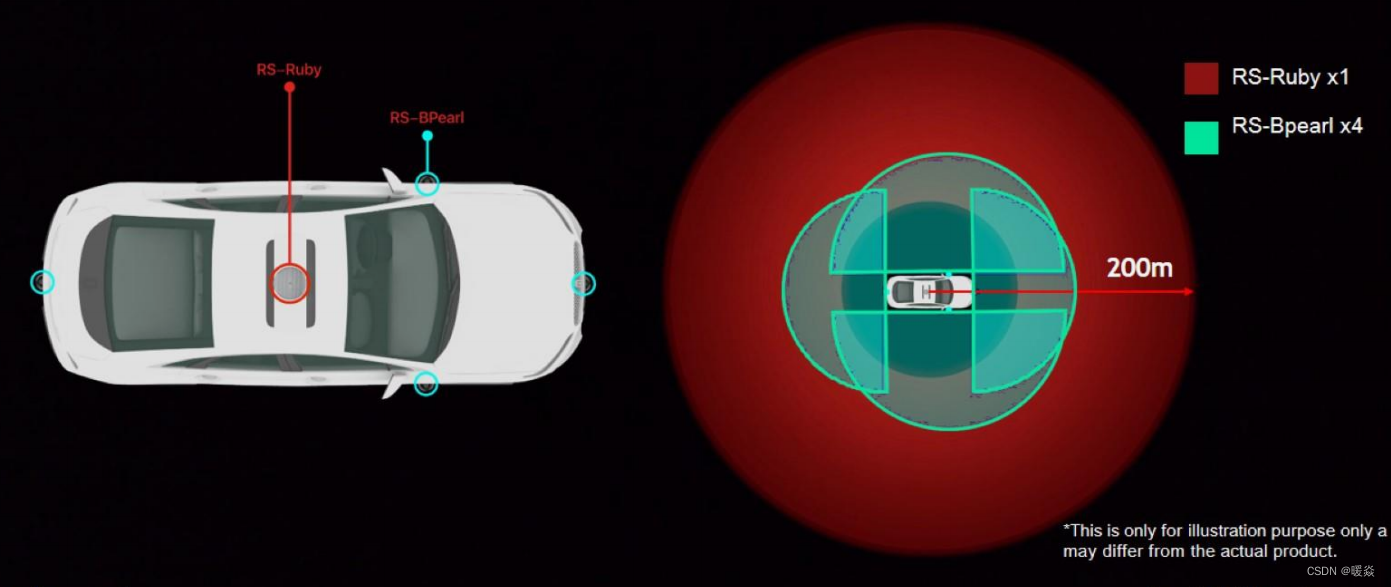
- 全方位感知(主雷达+近补雷达)
- 反射强度
- 抗干扰
- 抗多雷达对射干扰
- 抗强光干扰
- 多传感器融合
- 多传感器标定
- 时间同步
- 空间同步
- 软件部分
- 障碍物检测
- 障碍物分类
- 运动物体跟踪
- 可行驶区域检测
- SLAM建图
- 重定位
- 3 激光雷达数据采集
- 4 ROS编程基础
内容概要
1 激光雷达原理
2 激光雷达安装、标定与同步
3 激光雷达数据采集
4 ROS编程基础
1 激光雷达原理
1.1 什么是激光雷达?
LiDAR,Light Detection And Ranging
LADAR,LAser Detection And Ranging

探测和测距系统利用发射出的不同频率的波长,根据其从障碍物上返回所需的时间来绘制一个区域的地图。
LiDAR、Laser Radar以及LADAR系统,都使用光频率来进行这类测量。各系统之间,虽然原理近似,但应用特点和适用领域大有不同。
LiDAR已广泛意义上成为基于光的非接触式测量仪器的统称,但在实践中,LiDAR测量设备在处理“大区域”、“大容量”扫描领域作业中更加适用,系统通常会以网格或锥形的方式发出多束激光,并通过不断运动快速覆盖数百万个点,其精度根据需求,从0.1英寸(2.54毫米)到超过1英尺(304.8毫米)不等。LiDAR测量系统在土地测绘、建筑信息建模和自动驾驶汽车的导航系统中应用较为普遍。
Laser Radar系统,则更接近于:采用非合作靶标进行测量的激光跟踪仪。测量时,Laser Radar系统通常会发出一个单一的、聚焦的激光束来测量几米范围内的特征,精度在微米级别。
LADAR系统,正好集合了LiDAR与Laser Radar系统的优势。LADAR测量系统,如API品牌的9D LADAR,可以在不牺牲精度的前提下,提供更大的测量范围。LADAR系统可在所有Laser Radar适用领域中应用,并提供更佳的测量效率,完美适用于以白车身检测或机身装配等为代表的高端应用环境。
LiDAR系统更多地利用网格或锥状激光束来增加覆盖范围,并在较远的距离以较低的精度收集数据;Laser Radar系统则牺牲了测量速度和效率,以提高单点测量精度;对于制造业中真正高效、流畅运作的自动化近线/在线检测解决方案来讲,LiDAR系统缺乏精度,而Laser Radar则缺乏测量的速度和效率。LADAR系统,则兼容了前两种系统的优势,能够同时保障精度与速度,实现更高效的测量,更加适用于工业自动化生产领域的各测量环节。
参考:LADAR, LiDAR & Laser Radar激光雷达的种类划分与功能对比
1.2 激光雷达原理
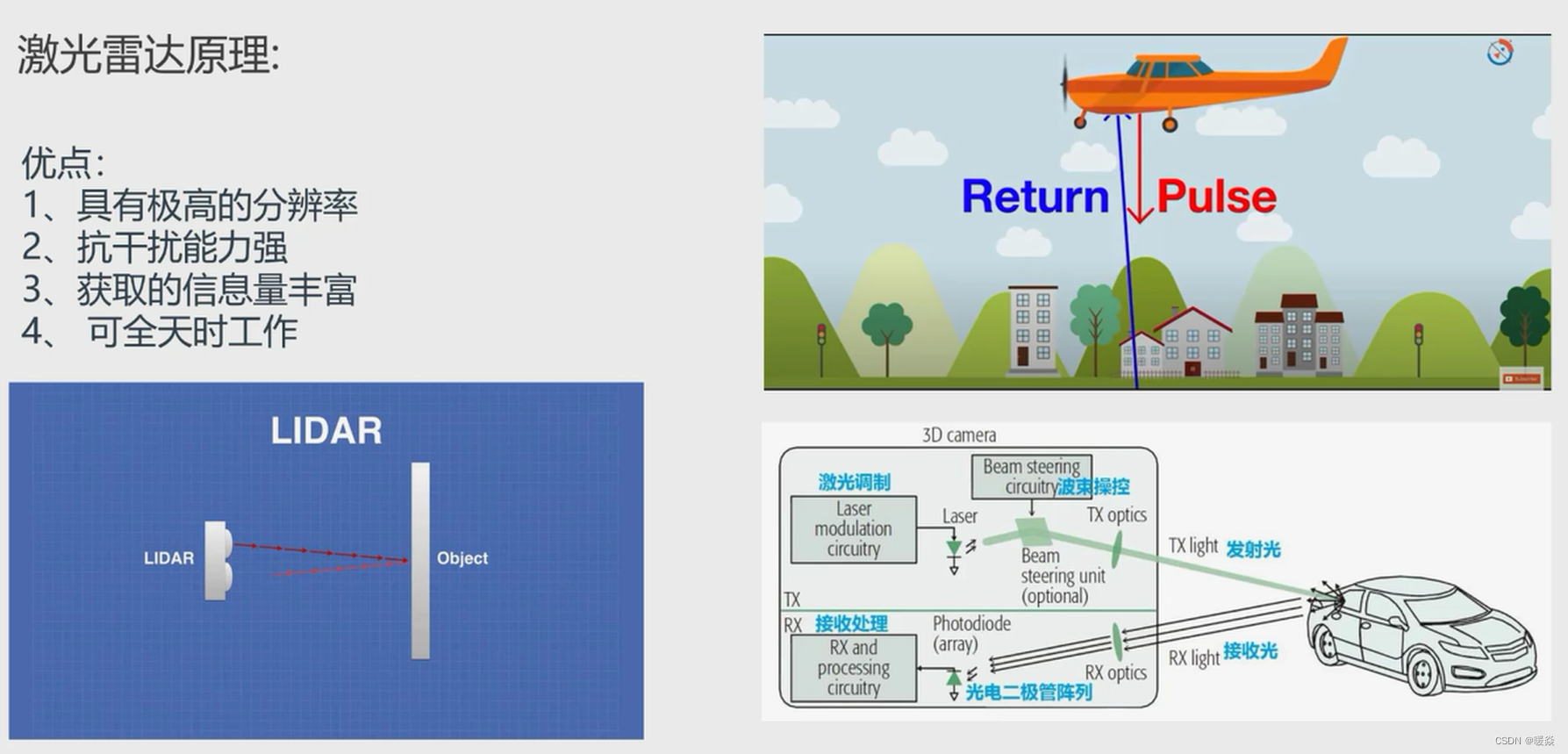
激光雷达优点:
1、具有极高的分辨率
2、抗干扰能力强
3、获取的信息量丰富
4、可全天时工作
激光雷达缺点:
易受环境中可反射激光物质的影响,例如天气(雨天)、灰尘和昆虫等影响。
1.3 激光雷达分类
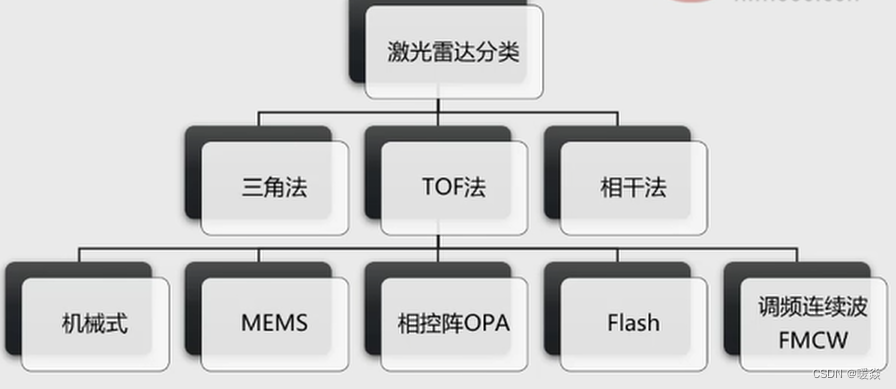
三角法
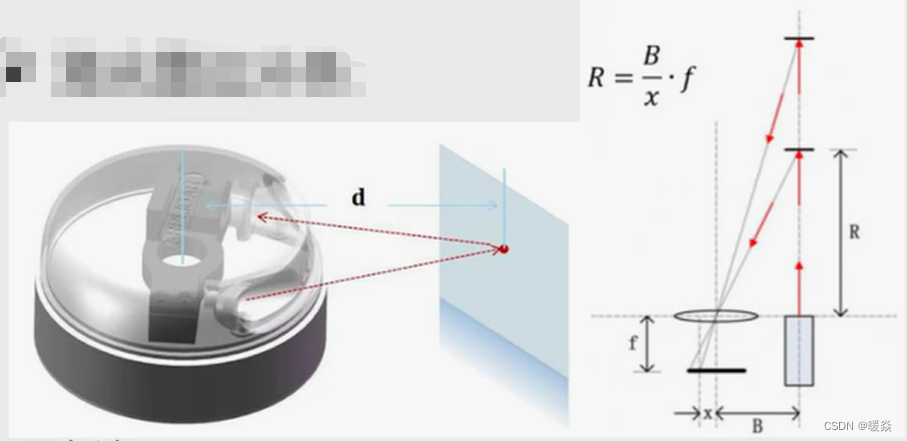
适应于近距离,百微米精度,随着距离的增加,精度会变得更差。
TOF法
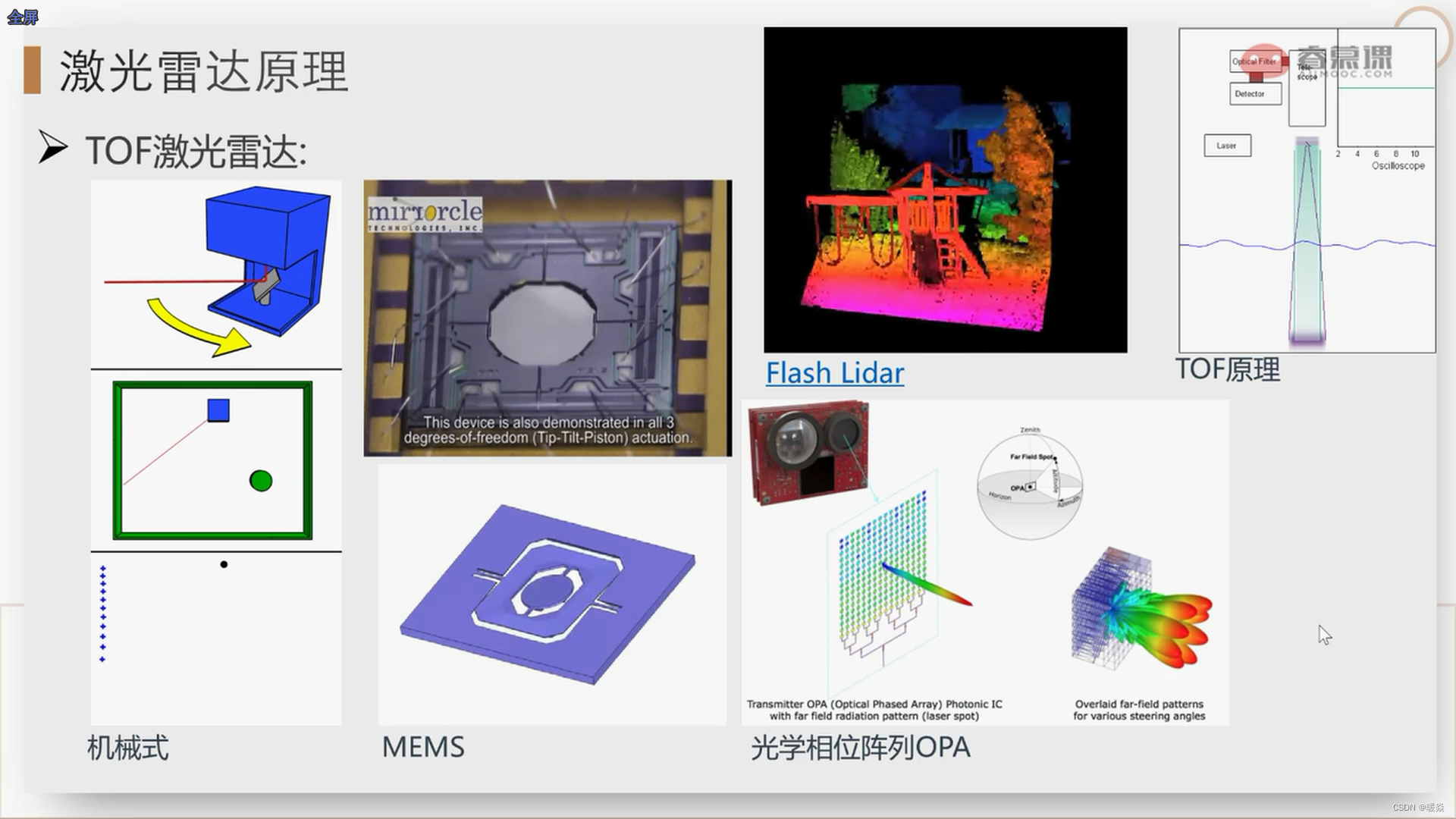
脉冲间隔测量法
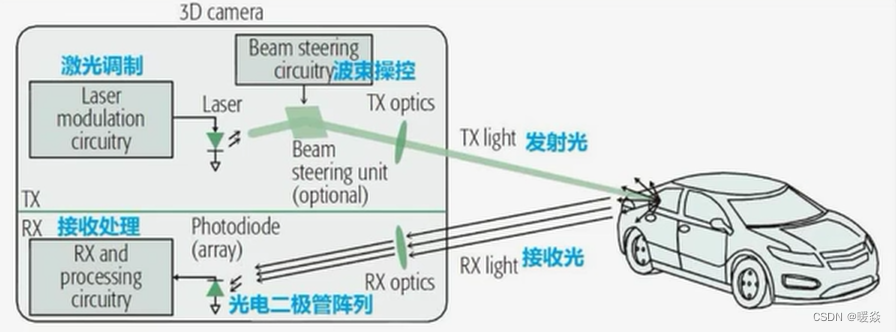
幅度调制的相位测量法
脉冲型TOF法,随着距离的增加所需要测算的精度要更高,发射器件的功率要大,对发射器提出了高要求,所以长距离的高精度是没有办法实现的。
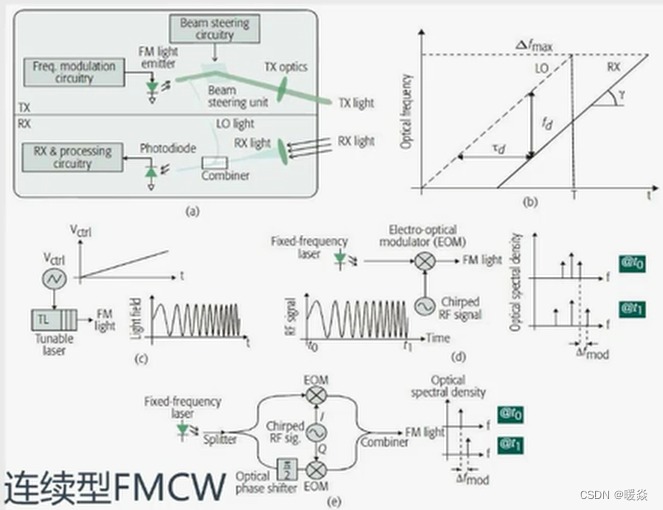
相干法
需要连续时间波长的叠加计算时间和距离,测量速度慢但是精度高,所以一般适用于手持扫描仪器中。

激光雷达用途
autonomous vehicles

agriculture
river survey
modelling of the pollution
archeology and building construction
2 激光雷达安装、标定与同步
2.1 激光雷达安装方式
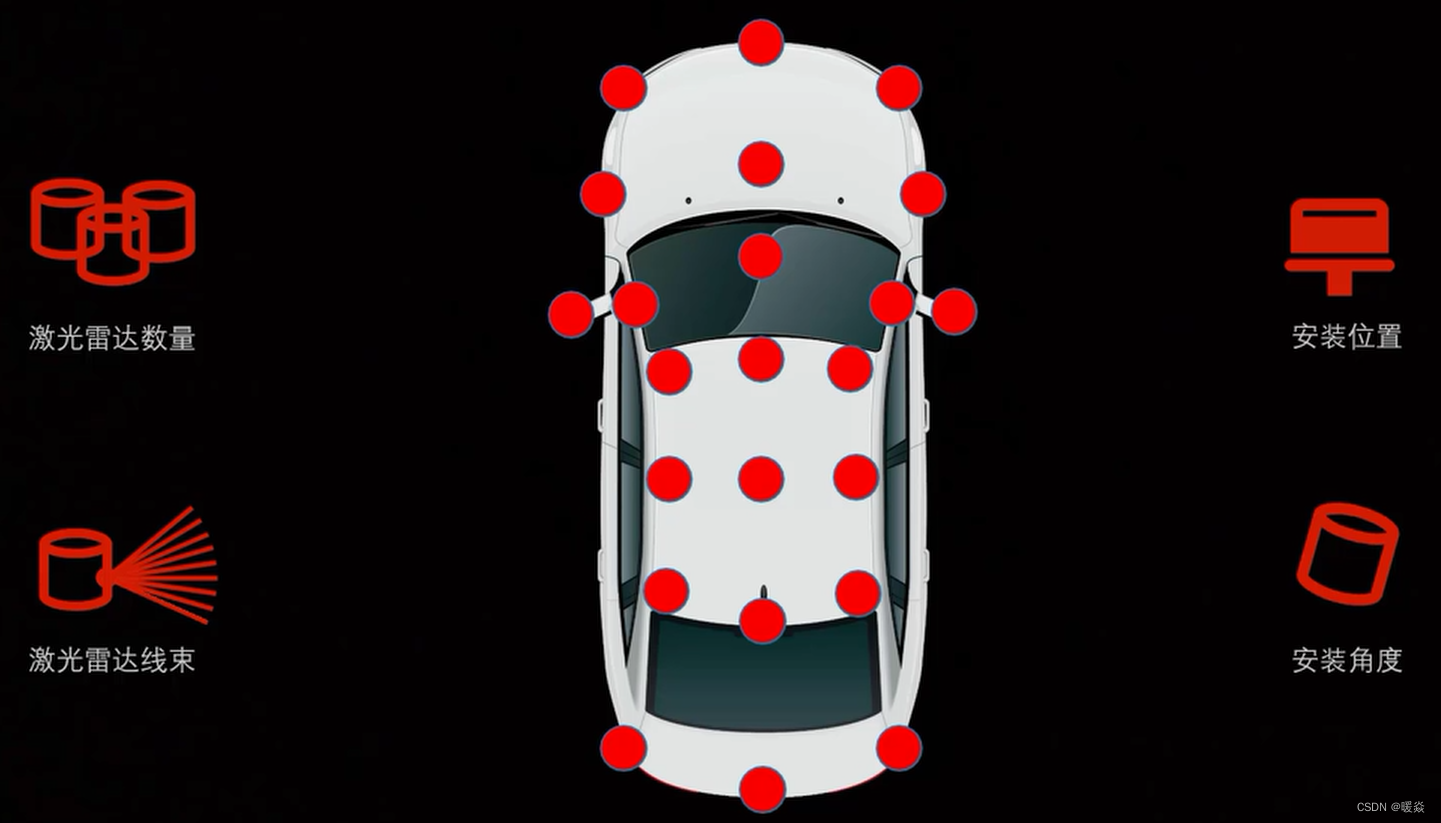
考虑因素
激光雷达数量
激光雷达线束
安装位置
安装角度
2.2 激光雷达点云用途

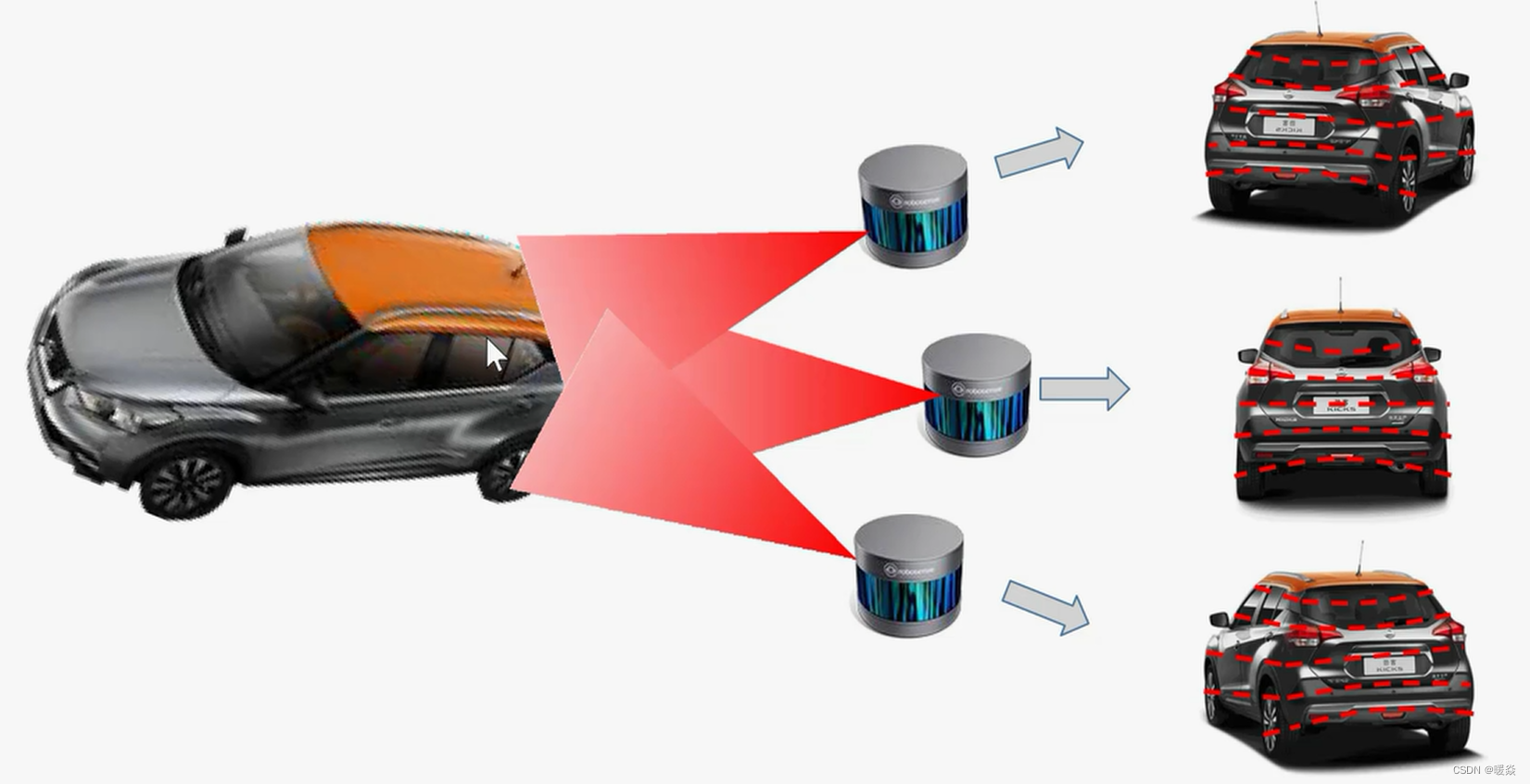
2.3 数据融合
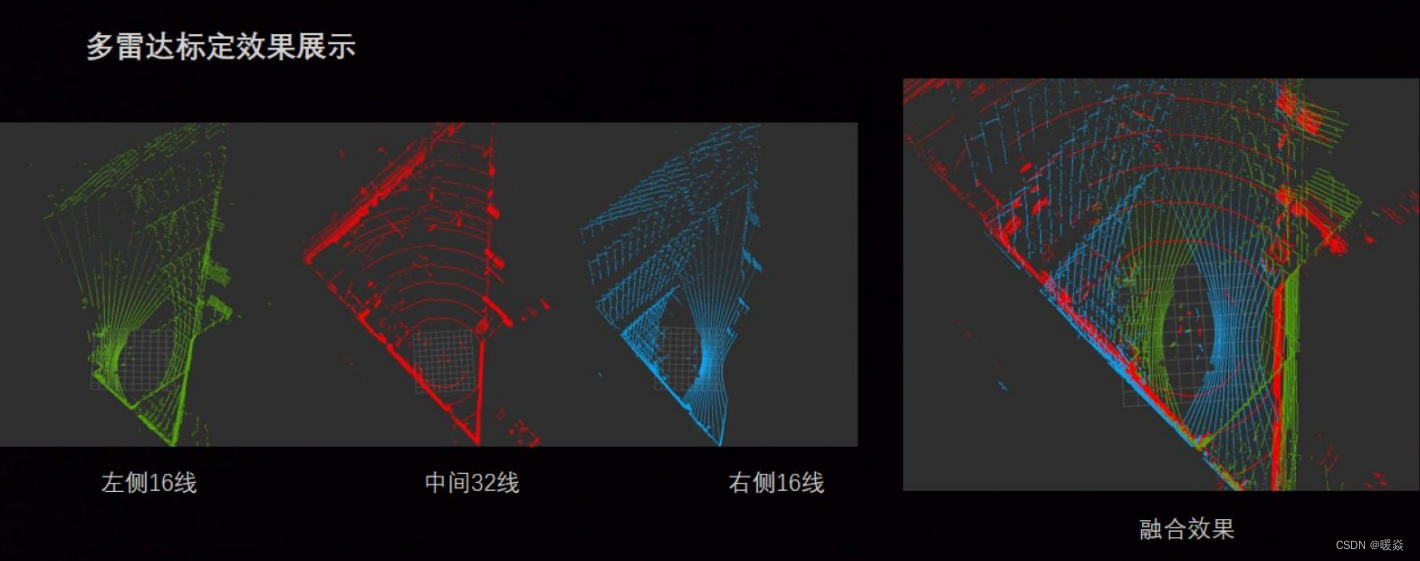
多激光雷达数据融合
为达到多线的效果,以多个少线数的激光雷达进行融合,降低成本。
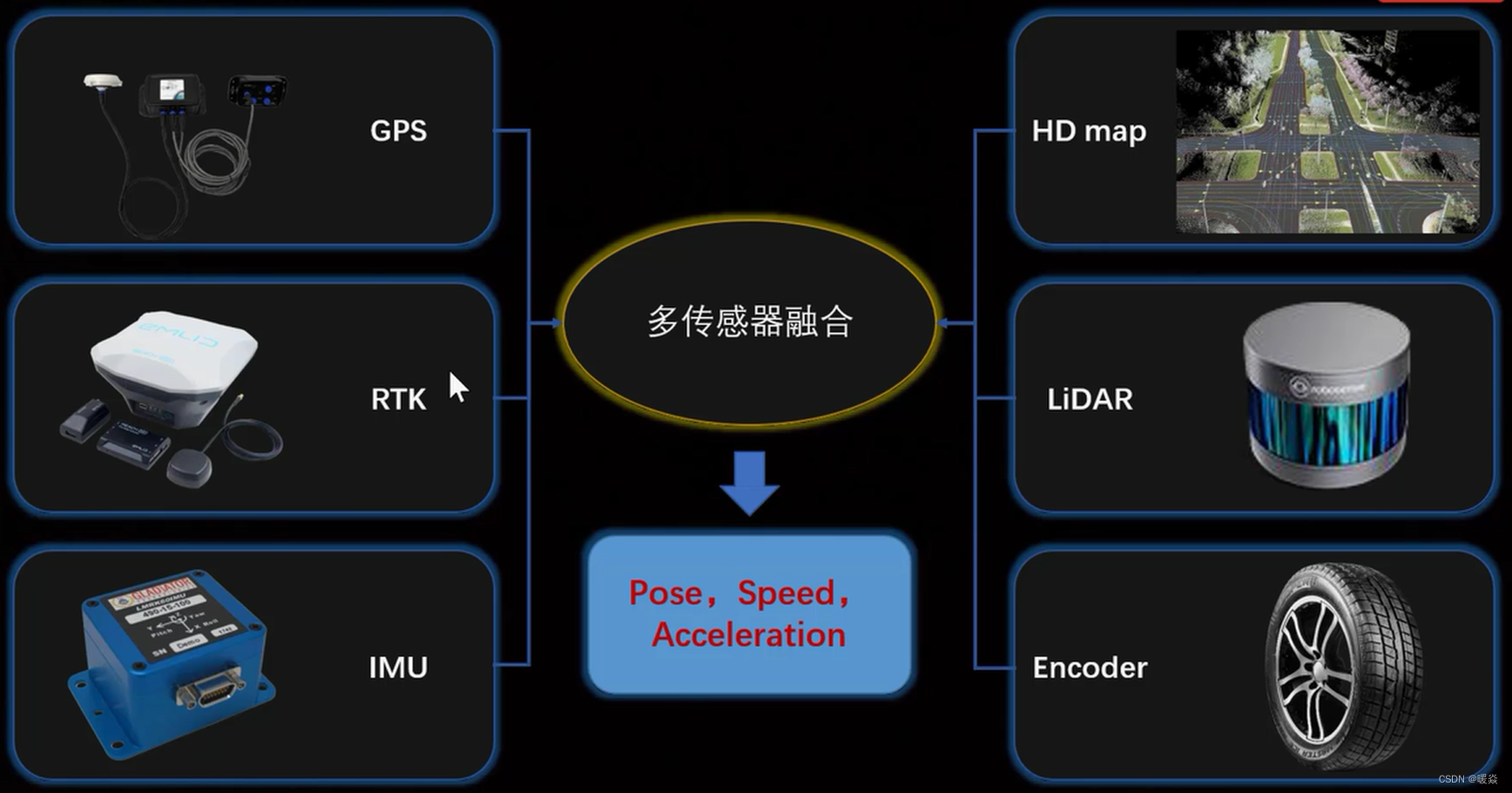
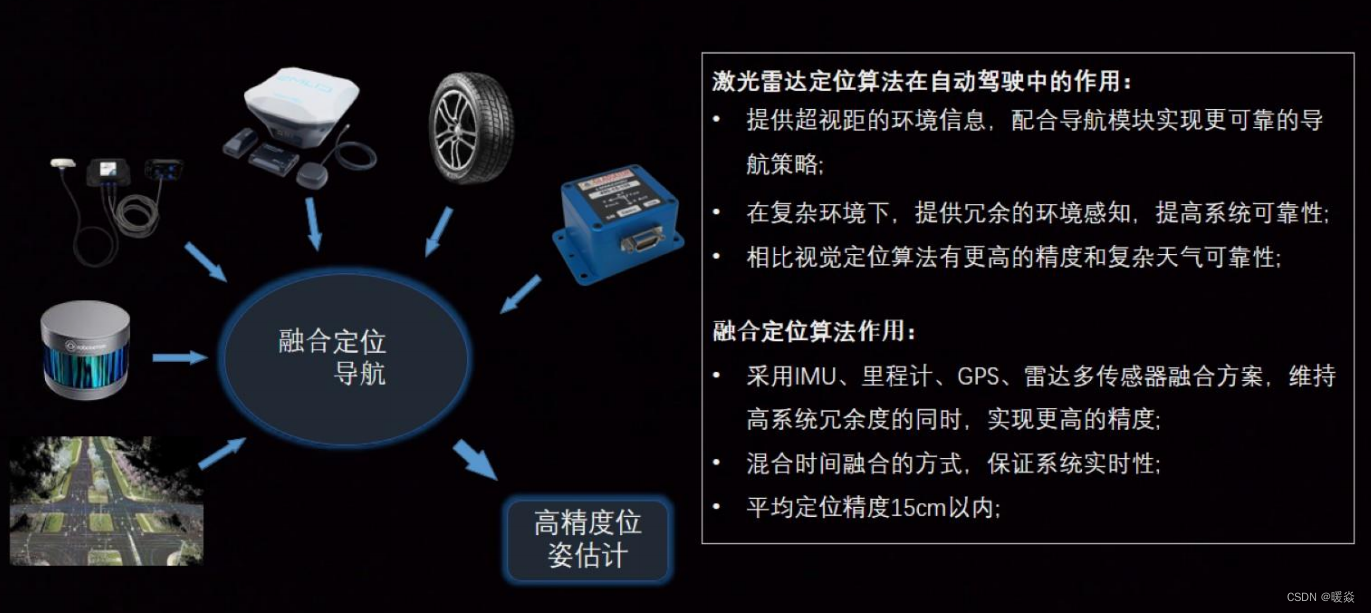
多传感器数据融合
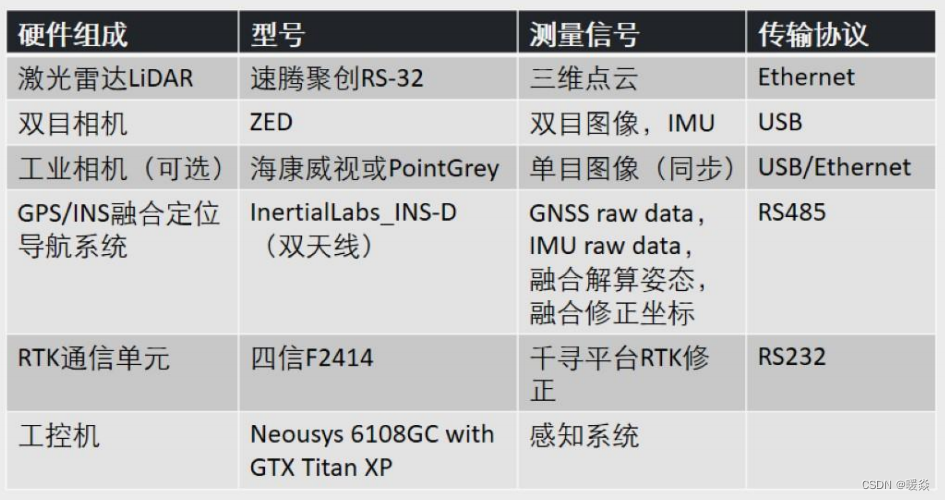
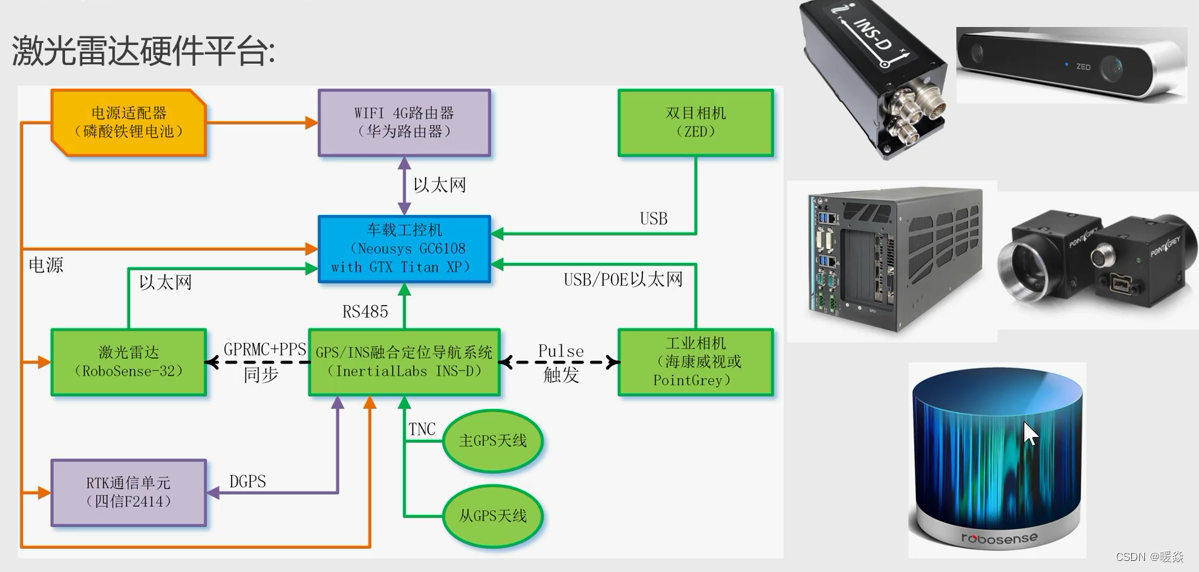
2.4 激光雷达系统方案


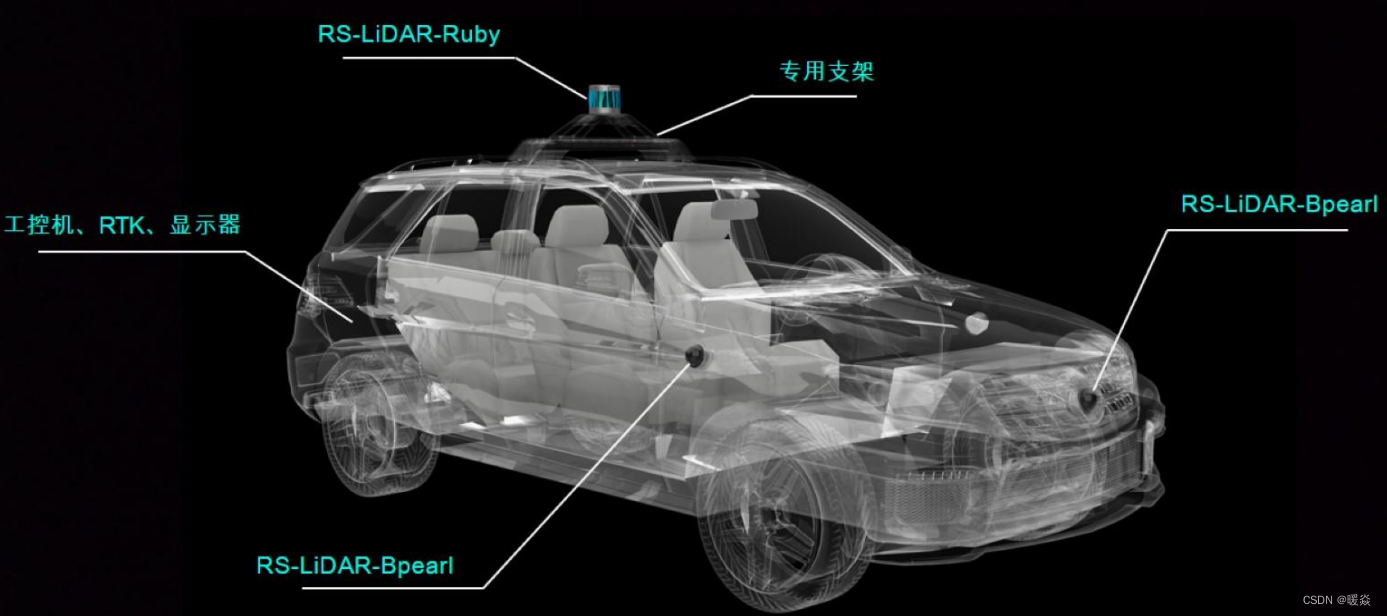
RS-LiDAR-16
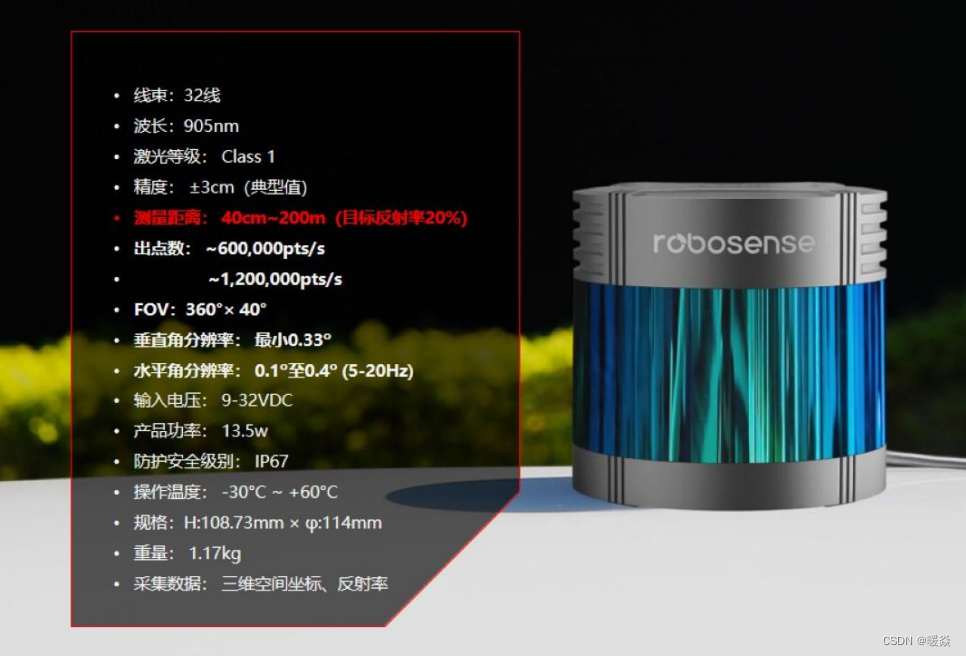
RS-LIDAR-32B
GPS及惯导设备
IPC工控机
激光雷达安装支架(固定支架)
显示器
交换机
网线
多雷达模拟时间同步板
硬件部分

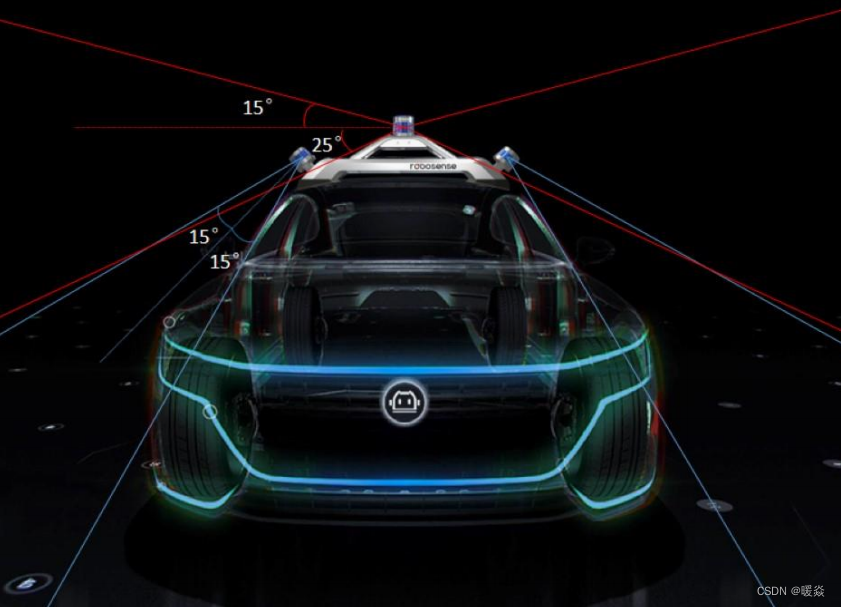
全方位感知(主雷达+近补雷达)

反射强度
抗干扰
抗多雷达对射干扰
抗强光干扰
多传感器融合
多传感器标定
时间同步
保证多个雷达的时间处于同一个时间计时标准(不进行时间同步时,每个雷达以启动时刻计时,使用自身内部独立的计时系统)。
外部时间源: GPS或网络时间源。
时间输入:
GPS通过UART接入雷达,发送GPRMC消息;PPS通过IO接入雷达,发送1 PPS脉冲信号。
网络时间通过以太网UDP指令发送时间,进行同步。
空间同步
保证所有的雷达数据转换到一个统一的坐标系下(不同雷达扫描到的同一个目标具有同样的坐标位置)
统一坐标系
选择位置最核心的一个雷达的坐标系作为雷达耦合的统一坐标系(理论上可以选择任意坐标系作为统一坐标系)
空间位置标定
平移量 – (x.y.z)
旋转量–(roll,pitch,yaw)
(平移量可以通过测量安装距离来标定初值,且有些安装方式是无法直接测距的,但是旋转量无法测量。)
软件部分

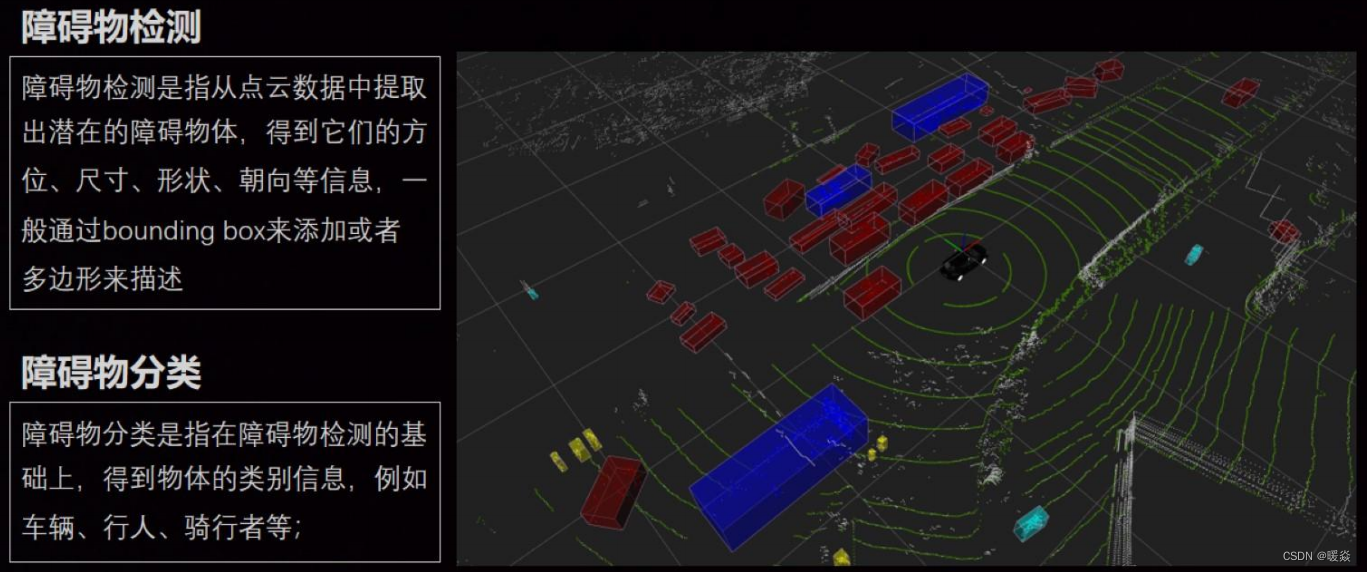
障碍物检测
障碍物检测是指从点云数据中提取出潜在的障碍物体,得到它们的方位、尺寸、形状、朝向等信息,
般通过bounding box来添加或者多边形来描述。
障碍物分类
障碍物分类是指在障碍物检测的基础上,得到物体的类别信息,例如车辆、行人、骑行者等。
运动物体跟踪
运动物体跟踪是指估计运动物体的运动状态,包括运动方向、速度大小、加速度、角速度、运动轨迹等
信息。
可行驶区域检测
可行驶区域检测是指在场景中分割出可以行驶的区域,根据不同的场景要求,相关的任务有路沿检测、车道线检测、地面检测、路面检测等任务。
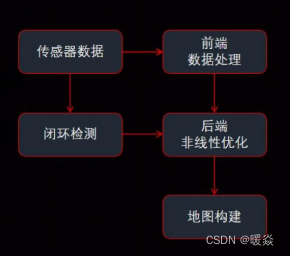
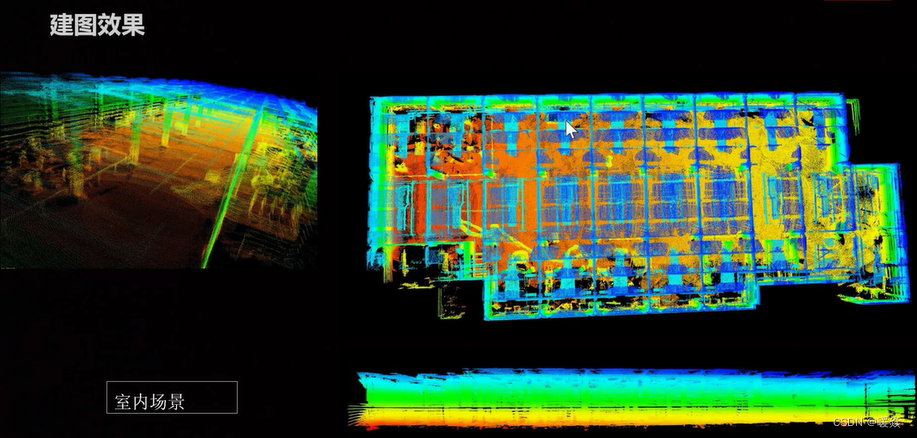
SLAM建图
建图算法的挑战:
精度高满足定位算法厘米级需求;
大场景稳定性高,精度不随地图增大而降低;
人工干预少,重复精度高;

重定位
定位场景展示:
小型移动机器人
特点:
经常发生灵活机动
角速度较大
视角比较低
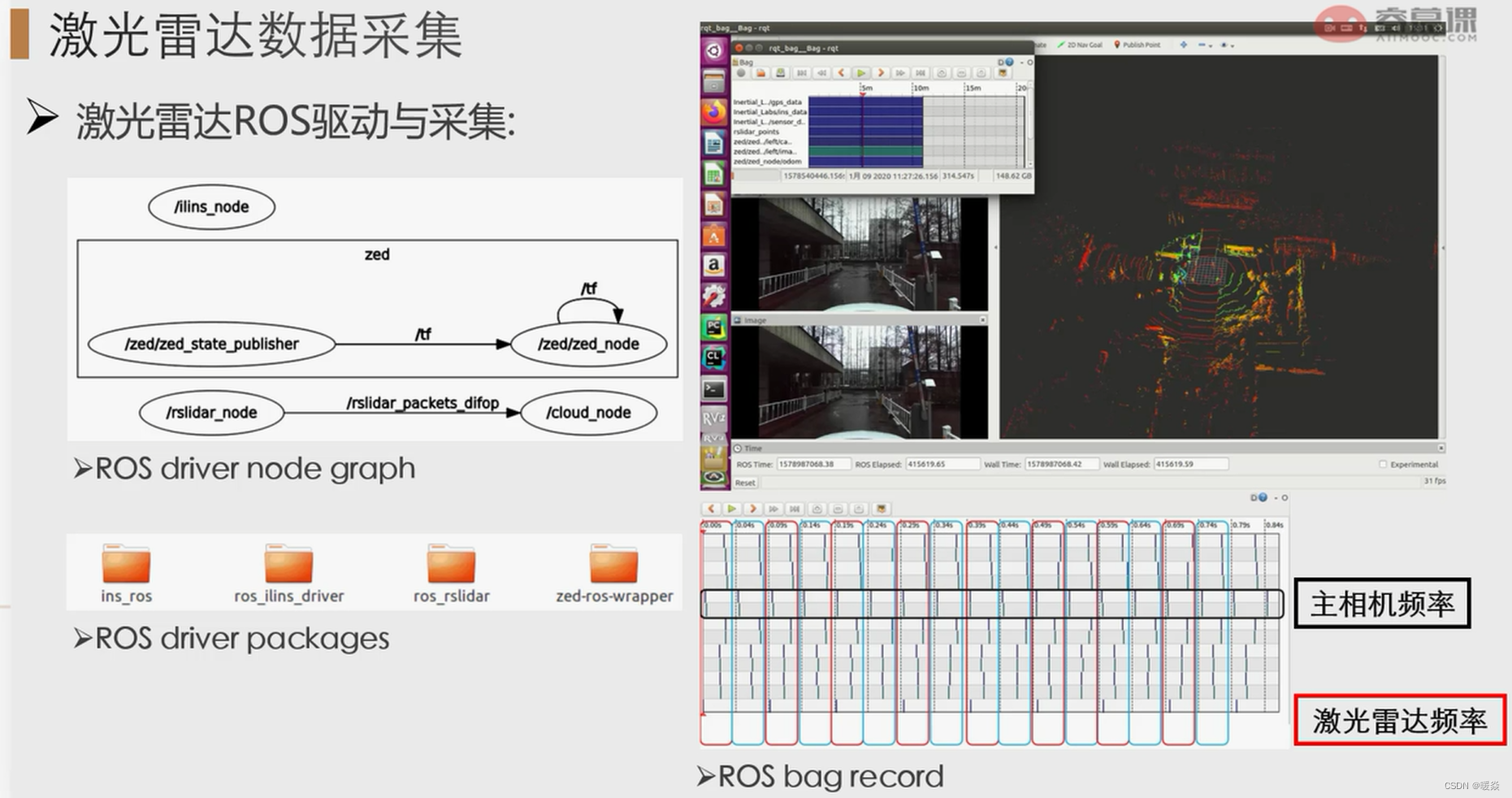
3 激光雷达数据采集

4 ROS编程基础
相关文章:
【三维点云】01-激光雷达原理与应用
文章目录内容概要1 激光雷达原理1.1 什么是激光雷达?1.2 激光雷达原理1.3 激光雷达分类三角法TOF法脉冲间隔测量法幅度调制的相位测量法相干法激光雷达用途2 激光雷达安装、标定与同步2.1 激光雷达安装方式考虑因素2.2 激光雷达点云用途2.3 数据融合多激光雷达数据融…...

自动驾驶感知——物体检测与跟踪算法|4D毫米波雷达
文章目录1. 物体检测与跟踪算法1.1 DBSCAN1.2 卡尔曼滤波2. 毫米波雷达公开数据库的未来发展方向3. 4D毫米波雷达特点及发展趋势3.1 4D毫米波雷达特点3.1.1 FMCW雷达角度分辨率3.1.2 MIMO ( Multiple Input Multiple Output)技术3.2 4D毫米波雷达发展趋势3.2.1 芯片级联3.2.2 专…...

C语言(内联函数(C99)和_Noreturn)
1.内联函数 通常,函数调用都有一定的开销,因为函数的调用过程包含建立调用,传递参数,跳转到函数代码并返回。而使用宏是代码内联,可以避开这样的开销。 内联函数:使用内联diamagnetic代替函数调用。把函数…...
理解与tensorflow2.0 代码实现 附完整代码)
图卷积神经网络(GCN)理解与tensorflow2.0 代码实现 附完整代码
图(Graph),一般用 $G=(V,E)$ 表示,这里的$V$是图中节点的集合,$E$ 为边的集合,节点的个数用$N$表示。在一个图中,有三个比较重要的矩阵: 特征矩阵$X$:维度为 $N\times D$ ,表示图中有 N 个节点,每个节点的特征个数是 D。邻居矩阵$A$:维度为 $N\times N$ ,表示图中 N…...
模电学习6. 常用的三极管放大电路
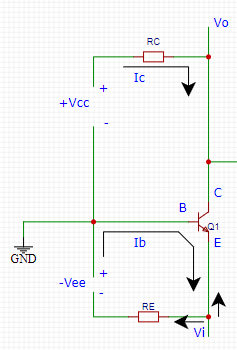
模电学习6. 常用的三极管放大电路一、判断三极管的工作状态1. 正偏与反偏的概念2. 工作状态的简单判断二、三种重要的放大电路1. 共射电路2. 共集电极放大电路3. 共基极放大电路一、判断三极管的工作状态 1. 正偏与反偏的概念 晶体管分P区和N区, 当P区电压大于N区…...
Lesson 6.6 多分类评估指标的 macro 和 weighted 过程 Lesson 6.7 GridSearchCV 的进阶使用方法
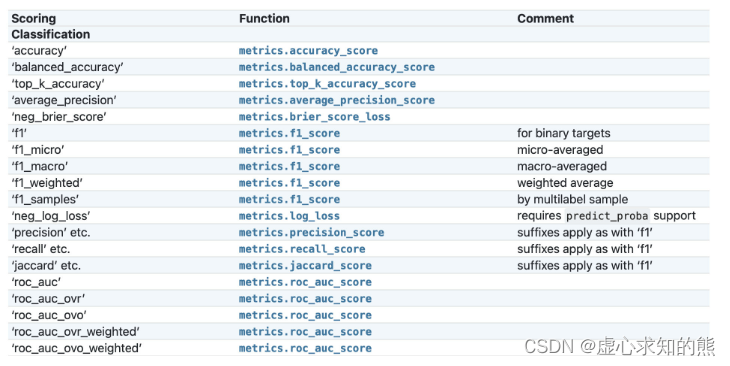
文章目录一、多分类评估指标的 macro 和 weighted 过程1. 多分类 F1-Score 评估指标2. 多分类 ROC-AUC 评估指标二、借助机器学习流构建全域参数搜索空间三、优化评估指标选取1. 高级评估指标的选用方法2. 同时输入多组评估指标四、优化后建模流程在正式讨论关于网格搜索的进阶…...
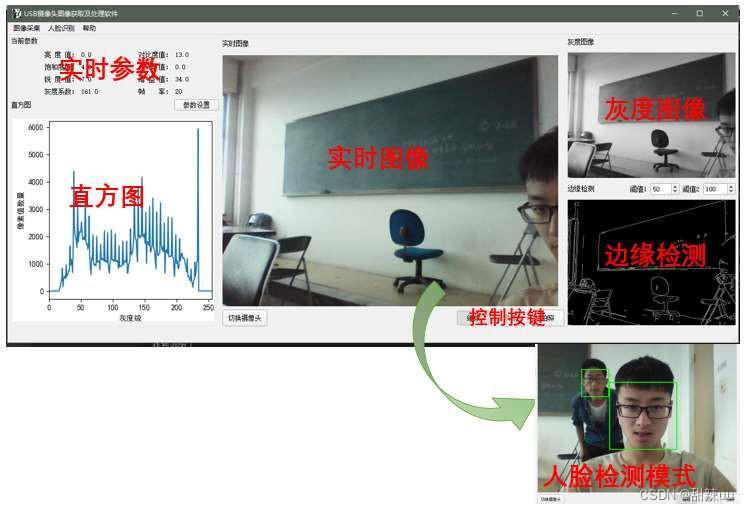
基于 Python 实时图像获取及处理软件图像获取;图像处理;人脸识别设计 计算机毕设 附完整代码+论文 +报告
界面结果:图像获取;图像处理;人脸识别 程序结构设计 图形用户界面设计与程序结构设计是互为表里的。或者说,程序结构设计是软件设计最本质、最核心的内容。徒有界面而内部逻辑结构混乱的软件一无是处。 Windows 操作系统是一款图形化的操作系统,相比于早期的计算机使用的命…...
前后端RSA互相加解密、加签验签、密钥对生成(Java)
目录一、序言二、关于PKCS#1和PKCS#8格式密钥1、简介2、区别二、关于JSEncrypt三、关于jsrsasign四、前端RSA加解密、加验签示例1、相关依赖2、cryptoUtils工具类封装3、测试用例五、Java后端RSA加解密、加验签1、CryptoUtils工具类封装2、测试用例六、前后端加解密、加验签交互…...

基于Java+SpringBoot+Vue前后端分离学生宿舍管理系统设计与实现
博主介绍:✌全网粉丝3W,全栈开发工程师,从事多年软件开发,在大厂呆过。持有软件中级、六级等证书。可提供微服务项目搭建、毕业项目实战、项目定制✌ 博主作品:《微服务实战》专栏是本人的实战经验总结,《S…...
)
前端高频面试题—JavaScript篇(二)
💻前端高频面试题—JavaScript篇(二) 🏠专栏:前端面试题 👀个人主页:繁星学编程🍁 🧑个人简介:一个不断提高自我的平凡人🚀 🔊分享方向…...
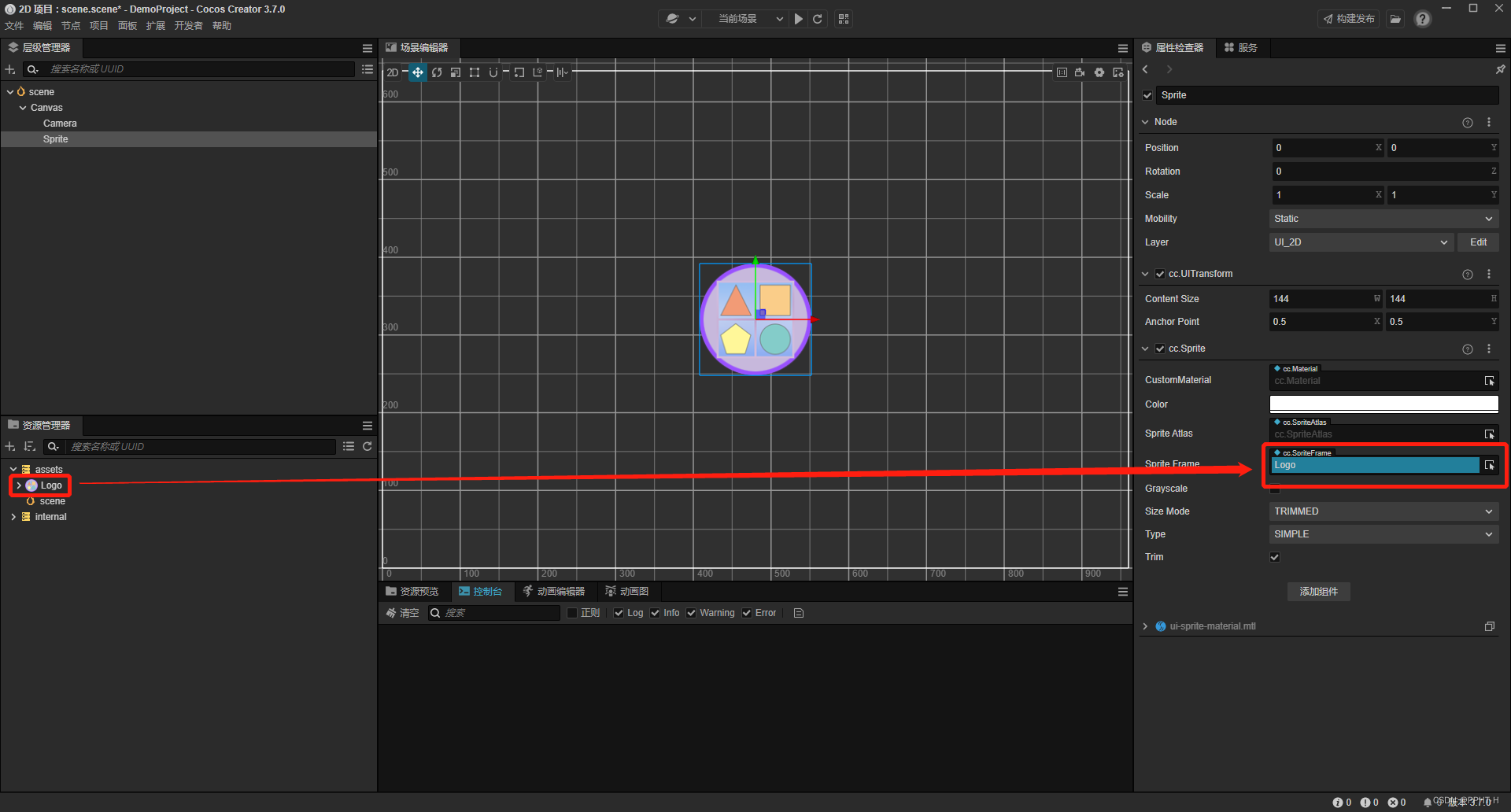
【微信小游戏开发笔记】第二节:Cocos开发界面常用功能简介
Cocos开发界面常用功能简介 本章只介绍微信小游戏开发时常用的功能,其他功能不常用,写多了记不住(其实是懒 -_-!): 层级管理器,用于操作各个节点。资源管理器,用于操作各种文件资源。场景编辑…...

3分钟,学会了一个调试CSS的小妙招
Ⅰ. 作用 用于调试CSS , 比控制台添更加方便,不需要寻找 ;边添加样式,边可以查看效果,适合初学者对CSS 的理解和学习; Ⅱ. 快速实现(两边) ① 显示这个样式眶 给 head 和 style 标签添加一个…...

【项目精选】基于jsp的健身俱乐部会员系统
点击下载源码 社会可行性 随着社会的发展和计算机技术的进步,人类越来越依赖于信息化的管理系统,这种系统能更加方便的获得信息以及处理信息。人们都改变了过去的思维,开始走向了互联网的时代,在 可行性小结 本章在技术可行性上…...

java注解
1. Java注解(Annotation) 2. Java注解分类 3. JDK基本注解 4. JDK元注解 5. 注解分类 6. 自定义注解开发 7. 提取Annotation信息 8. 注解处理器 9. 动态注解处理器(spring aop方式) 1. Java注解(Annotation) Java注解是附加在代码中的一些元信息,用于…...

移动测试相关
一、环境搭建 准备工作: (python、pycharm安装配置好) 1、Java SDK 安装配置 Java Downloads | Oracle 下载安装后配置系统环境变量:JAVA_HOME(jdk根目录路径)和path(jdk根目录下的bin目录路径…...
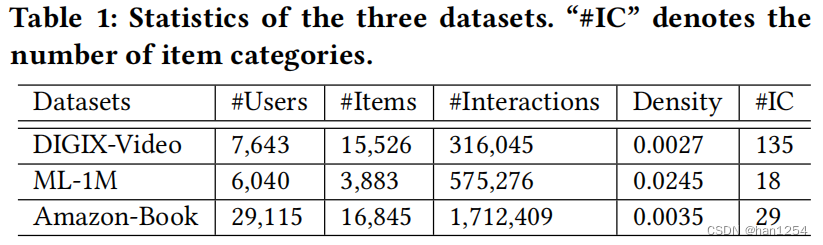
SIGIR22:User-controllable Recommendation Against Filter Bubbles
User-controllable Recommendation Against Filter Bubbles 摘要 推荐系统经常面临过滤气泡的问题:过度推荐基于用户特征以及历史交互的同质化项目。过滤气泡将会随着反馈循环增长,缩小了用户兴趣。现有的工作通常通过纳入诸如多样性和公平性等准确性之…...
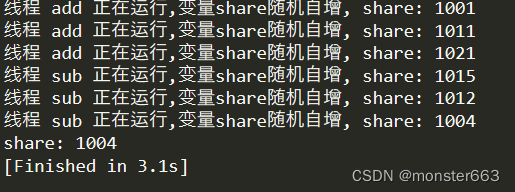
Python中的进程线程
文章目录前言多进程与多线程基本概念多进程multiprocessing 类对象进程池subprocess模块进程间通信多线程threading实现线程操作线程共享所有变量线程锁参考资料前言 又花了点时间学习了一下Python中的多线程与多进程的知识点,梳理一下供复习参考 多进程与多线程 …...

python(8):使用conda update更新conda后,anaconda所有环境崩溃----问题没有解决,不要轻易更新conda
文章目录0. 教训1. 问题:使用conda update更新conda后,anaconda所有环境崩溃1.1 问题描述1.2 我搜索到的全网最相关的问题----也没有解决3 尝试流程记录3.1 重新安装pip3.2 解决anaconda编译问题----没成功0. 教训 (1) 不要轻易使用conda update更新conda----我遇到…...

c++11 标准模板(STL)(std::multimap)(四)
定义于头文件 <map> template< class Key, class T, class Compare std::less<Key>, class Allocator std::allocator<std::pair<const Key, T> > > class multimap;(1)namespace pmr { template <class Key, class T…...

乐观锁及悲观锁
目录 1.乐观锁 (1).定义 (2).大体流程 (3).实现 (4).总结 2.悲观锁 (1).定义 (2).大体流程 (3).实现 (4).缺点 (5).总结 1.乐观锁 (1).定义 乐观锁在操作数据时非常乐观,认为别的线程不会同时修改数据所以不会上锁,但是在更新的时候会判断一…...

技术创始人如何选择CEO:谦逊、互补与权力交接的艺术
1. 从技术专家到掌舵者:CEO角色转变的深层逻辑 在EDA(电子设计自动化)和半导体设计这个高度技术驱动的领域里,创业公司的故事每天都在上演。你可能会在DAC(设计自动化大会)上看到上百家初创公司,…...

CV前沿论文实战解码:轻量化与多模态对齐的工程落地指南
1. 这不是“论文速递”,而是一份面向实战者的CV研究动态解码指南你点开这个标题,大概率不是为了收藏一份PDF列表,而是想快速判断:这篇新出的视觉论文,值不值得我花三小时精读?它背后的技术思路,…...

别再混淆了!结构方程模型SEM中的反映型vs构成型指标,用PLS-PM一次讲清
结构方程模型中的反映型与构成型指标:理论辨析与PLS-PM实战指南 在数据分析的复杂世界里,结构方程模型(SEM)就像是一把瑞士军刀,能够同时处理测量模型和结构模型。但许多研究者在使用这把"军刀"时,常常忽略了一个关键细…...

AI智能体记忆系统设计:分层架构与向量化检索实战
1. 项目概述:一个为AI智能体设计的记忆系统最近在折腾AI智能体(Agent)相关的项目,发现一个挺有意思的痛点:如何让这些智能体拥有“记忆”?不是那种简单的对话历史记录,而是更接近人类工作记忆和…...

热间隙填充材料在PCB散热设计中的关键应用与选型
1. 热间隙填充材料在PCB散热设计中的核心作用热间隙填充材料(Thermal Gap Filler)是现代电子散热系统中不可或缺的功能性材料。作为一名经历过数十个散热方案设计的工程师,我深刻理解这类材料在解决"散热器与PCB之间公差累积"问题上…...

ARMv8 A64指令集内存访问优化与LDRH/LDRSB指令详解
1. A64指令集与内存访问基础在ARMv8架构中,A64指令集作为64位执行状态的核心指令系统,其内存访问指令的设计直接影响处理器性能。与32位的A32指令集相比,A64在寄存器数量、地址空间和指令编码等方面都有显著改进。1.1 ARMv8内存访问特点ARM架…...

AI编码助手如何重塑开发体验:从工具到伙伴的范式转变
1. 项目概述:当AI编码助手遇上“氛围感”最近在GitHub上看到一个挺有意思的项目,叫“awesome-ai-vibe-coding”。初看这个标题,可能会有点摸不着头脑。“Awesome”系列我们见多了,是各种优质资源的集合;“AI Coding”也…...

Go语言极简Web框架Meridian:依赖注入与清晰架构实践
1. 项目概述:一个“极简”的现代Web应用框架最近在GitHub上闲逛,又看到了一个名为rynfar/meridian的项目。点进去一看,简介写着“A modern web framework for building APIs and web applications in Go”。说实话,现在Go语言的We…...

java+uniapp集成unipush2实现消息推送
一、开通uniPush2.0 1.实名认证 登录DCloud开发者中心,通过实名认证 2.进入UniPush控制台 HBuilderX中打开项目的manifest.json文件 导航在“App模块配置” → 项的“Push(消息推送)” → “UniPush”下点击配置 或者申请开通。 3.配置应用信息 在UniPush开通界面…...

三极直接耦合放大电路参数优化
简 介: 本文探讨了三极直接耦合放大电路的优化设计。通过调整R3、R6等电阻参数,使Q3集电极偏置电压达到6V左右,实现了10V的输出动态范围。理论分析电路放大倍数为1000倍,实测为800倍。研究发现第一级放大管Q1处于弱放大状态&#…...