参考——温湿度传感器DHT11驱动_STM32
设备:stm32f407ZGT6
环境:FreeRTOS HAL
到网上找DHT11的驱动,但是都无法使用。原因是RTOS环境中,由于多线程,使用循环计数阻塞式的delay_us延时函数就没那么准,且不同设备中delay_us的计数值不一样。而DHT11对时序要求得又十分严格,这就会导致读取数据异常,甚至无法读取。
虽然考虑过使用其他方法达成更精准的微秒级延时,但是对于单总线传输终归小题大做了。于是下面就简单的使用计数值来模拟延时,不需要考虑延时多少微秒,只需要比较高电平持续时间的相对长短。
/**********************************************************************************************************
函数名称:us延时函数,最小延时为1us
输入参数:时间
输出参数:无
**********************************************************************************************************/
void delay_us(unsigned int time)
{unsigned short i = 0;while (time--){i = 8;while (i--);}
}需要注意的是,下面代码使用的是C++,如果你使用的是C,那么用相应功能的代码替换掉即可。bool类型需要包含stdbool头文件
DHT11.h
头文件里未被注释的接口,决定了哪些函数需要重点关注
#ifndef DHT11_H
#define DHT11_Hvoid DHT11_Init();
//bool DHT11_Read_Data(float &temp,float &humi);
bool DHT11_Read_Data_Fast_Pro(float &temp, float &humi);//自定义的快速读取函数
#endif//DHT11_H
DHT11.cpp
里面的这个std_delay_us是用于调试中用的,在void DHT11_Rst()函数里,你把延时换成你自带的即可,这个不需要多精准。
下面的函数是与时序图直接对应的,连续读取温度时,最好间隔1s以上
同时说明一下,下面将作为反面例子!!,找了许久才发现是数组越界引发的硬件中断,下面代码忘了对timeBufIndex清零。后面我会发一个简化版
#include "DHT11.h"
#include "cmsis_os2.h"
#include "stm32f4xx_hal.h"#define DHT11_Pin GPIO_PIN_6
#define DHT11_GPIO_Port GPIOE
#define DHT11_GPIO_CLK_ENABLE() __HAL_RCC_GPIOE_CLK_ENABLE()#define DHT11_Read() (DHT11_GPIO_Port->IDR & DHT11_Pin) /*HAL_GPIO_ReadPin(DHT11_GPIO_Port, DHT11_Pin)*/
#define DHT11_Write(x) HAL_GPIO_WritePin(DHT11_GPIO_Port, DHT11_Pin, (GPIO_PinState) (x))#define DHT11_High() HAL_GPIO_WritePin(DHT11_GPIO_Port, DHT11_Pin, GPIO_PIN_SET)
#define DHT11_Low() HAL_GPIO_WritePin(DHT11_GPIO_Port, DHT11_Pin, GPIO_PIN_RESET)static GPIO_InitTypeDef GPIO_InitStruct = {0};
static uint16_t std_delay_80us=875;//事先测试过
static uint16_t std_delay_50us=566;
static uint16_t time_count;/**动态计算延时,以确保任何情况下都可以得到较为准确的延时*/
void std_delay_us(uint8_t us)
{// uint16_t count = std_delay_80us * us / 80;//测试得到的uint16_t count =11 * us ;for (uint16_t i = 0; i < count; ++i);
}/**函数*/
void DHT11_Input();
void DHT11_Output();
void DHT11_Rst();void DHT11_Init()
{DHT11_GPIO_CLK_ENABLE();GPIO_InitStruct.Pin = DHT11_Pin;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;// GPIO_InitStruct.Pull = GPIO_PULLUP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(DHT11_GPIO_Port, &GPIO_InitStruct);DHT11_High();
}void DHT11_Input()
{GPIO_InitStruct.Mode = GPIO_MODE_INPUT;HAL_GPIO_Init(DHT11_GPIO_Port, &GPIO_InitStruct);
}void DHT11_Output()
{GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;HAL_GPIO_Init(DHT11_GPIO_Port, &GPIO_InitStruct);
}void DHT11_Rst()
{DHT11_Output();DHT11_Low();osDelay(25);//根据时序图可知,需要至少拉低18msDHT11_High();std_delay_us(20);//20-40us
}void DHT11_Check()
{DHT11_Input();for (time_count =0;DHT11_Read();++time_count);/* 等待DHT11数据线拉低 */for (time_count =0;!DHT11_Read();++time_count); /* 等待DHT11数据线拉高 *///持续80usstd_delay_80us = time_count;//获取80us需要的计数值
}//从DHT11读取一个位
//返回值:1/0
uint8_t DHT11_Read_Bit()
{for (time_count =0;DHT11_Read();++time_count);//等待低电平//变低了说明上一次数据位读取结束for (time_count =0;!DHT11_Read();++time_count); //等待变高电平// std_delay_50us = time_count;//测试用的//变高了说明数据位读取开始/**开始读数据*///低电平:26-28us//高电平:70usstd_delay_us(40);// 等待40us,如果延时准确的话if (DHT11_Read())return 1;elsereturn 0;
}//从DHT11读取一个字节
//返回值:读到的数据
uint8_t DHT11_Read_Byte()
{uint8_t dat = 0;for (uint8_t i = 0; i < 8; i++){dat <<= 1;dat |= DHT11_Read_Bit();}return dat;
}//uint16_t timeBuf[40];
//uint8_t timeBufIndex=0;
//uint16_t timeMax=0;
//uint16_t timeMin=10000;
//uint8_t DHT11_Read_Byte_Fast()
//{
// uint8_t dat=0;
// for (uint8_t i = 0; i < 8; i++)
// {
// for (time_count =0;DHT11_Read();++time_count);//等待低电平
// //变低了说明上一次数据位读取结束
//
// for (time_count =0;!DHT11_Read();++time_count); //等待变高电平
// // std_delay_50us = time_count;//测试用的
// //变高了说明数据位读取开始
//
// /**开始读数据*/
// //低电平:26-28us 高电平:70us
// for (time_count =0;DHT11_Read();++time_count);//等待低电平
// timeBuf[timeBufIndex++]=time_count;
// // std_delay_us(30);// 等待40us,如果延时准确的话
// dat <<= 1;
// dat |= DHT11_Read();
// }
// return dat;
//}uint16_t timeBuf[40];//存储计数值
uint8_t timeBufIndex=0;//存储计数值索引
uint16_t timeMax=0;
uint16_t timeMin=0xFFFF;
void DHT11_Read_Byte_Fast_Pro()
{for (uint8_t i = 0; i < 8; i++){for (time_count =0;DHT11_Read();++time_count);//等待低电平//变低了说明上一次数据位读取结束for (time_count =0;!DHT11_Read();++time_count); //等待变高电平//变高了说明数据位读取开始/**开始读数据*///低电平:26-28us 高电平:70usfor (time_count =0;DHT11_Read();++time_count);//等待低电平timeBuf[timeBufIndex++]=time_count;//存储计数值}
}bool DHT11_Read_Data_Fast_Pro(float &temp, float &humi)
{uint8_t buf[5];DHT11_Rst();DHT11_Check();for (unsigned char & i : buf)//读取40位数据{DHT11_Read_Byte_Fast_Pro();}for (unsigned short i : timeBuf){if(i>timeMax){timeMax=i;}else if(i<timeMin){timeMin=i;}}/**把计数值转为二进制数据*/uint16_t timeMed=(timeMax+timeMin)>>1;//整除2,取中位数uint8_t data;//临时数据bool tempBin;//临时二进制数据for (int i = 0; i < 5; ++i){data=0;//重置for (int j = 0; j < 8; ++j){data<<=1;//比较计数值,读取二进制数据if(timeBuf[i*8+j]>timeMed){tempBin= true;}else{tempBin= false;}data|=tempBin;}buf[i]=data;//存储数据}/**检验**/if ((buf[0] + buf[1] + buf[2] + buf[3]) == buf[4]){humi = (float) (buf[0] + buf[1] * 0.1);temp = (float) (buf[2] + buf[3] * 0.1);return true;}else{return false;}
}//bool DHT11_Read_Data(float &temp, float &humi)
//{
// uint8_t buf[5];
// DHT11_Rst();
// DHT11_Check();
// for (unsigned char & i : buf)//读取40位数据
// {
// i = DHT11_Read_Byte_Fast();
// }
//
// for (unsigned short i : timeBuf)
// {
// if(i>timeMax)
// {
// timeMax=i;
// }
// else if(i<timeMin)
// {
// timeMin=i;
// }
// }
//
// uint16_t timeMed=(timeMax+timeMin)>>1;
// uint8_t data;
// uint8_t tempBin;
// uint8_t tempBuf[5];
// for (int i = 0; i < 5; ++i)
// {
// data=0;
// for (int j = 0; j < 8; ++j)
// {
// data<<=1;
// if(timeBuf[i*8+j]>timeMed)
// {
// tempBin=1;
// }
// else
// {
// tempBin=0;
// }
// data|=tempBin;
// }
// tempBuf[i]=data;
// }
//
// //检验
// if ((buf[0] + buf[1] + buf[2] + buf[3]) == buf[4])
// {
// humi = (float) (buf[0] + buf[1] * 0.1);
// temp = (float) (buf[2] + buf[3] * 0.1);
// return true;
// }
// else
// {
// return false;
// }
//}修正版。里面有三个版本,没被注释的是特化版本,其下愈为通用
#include "DHT11.h"
#include "cmsis_os2.h"
#include "delay.h"
#include "stm32f4xx_hal.h"#define DHT11_Pin GPIO_PIN_6
#define DHT11_Pin_Location 6
#define DHT11_GPIO_Port GPIOE
#define DHT11_GPIO_CLK_ENABLE() __HAL_RCC_GPIOE_CLK_ENABLE()
#define DHT11_MAX_DELAY_COUNT 7000//防止卡死#define DHT11_Read() (DHT11_GPIO_Port->IDR & DHT11_Pin) /*HAL_GPIO_ReadPin(DHT11_GPIO_Port, DHT11_Pin)*/#define DHT11_High() DHT11_GPIO_Port->ODR |= (0x01 << DHT11_Pin_Location)
#define DHT11_Low() DHT11_GPIO_Port->ODR &= ~(0x01 << DHT11_Pin_Location) /*HAL_GPIO_WritePin(DHT11_GPIO_Port, DHT11_Pin, GPIO_PIN_RESET)*/#define DHT11_IN() \{ \DHT11_GPIO_Port->MODER &= ~(3 << (2 * DHT11_Pin_Location)); \DHT11_GPIO_Port->MODER |= 0 << 2 * DHT11_Pin_Location; \}
#define DHT11_OUT() \{ \DHT11_GPIO_Port->MODER &= ~(3 << (2 * DHT11_Pin_Location)); \DHT11_GPIO_Port->MODER |= 1 << 2 * DHT11_Pin_Location; \}//static uint16_t std_delay_80us = 875;//事先测试过
//static uint16_t std_delay_50us = 566;/**动态计算延时,以确保任何情况下都可以得到较为准确的延时*/
//void std_delay_us(uint8_t us)
//{
// // uint16_t count = std_delay_80us * us / 80;//测试得到的
// uint16_t count = 11 * us;
// for (uint16_t i = 0; i < count; ++i)
// ;
//}
inline void std_delay_25us()
{for (uint16_t i = 0; i < 273; ++i);
}/**函数*/
inline void DHT11_Rst();void DHT11_Init()
{GPIO_InitTypeDef GPIO_InitStruct = {0};DHT11_GPIO_CLK_ENABLE();GPIO_InitStruct.Pin = DHT11_Pin;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_PULLUP;// GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;HAL_GPIO_Init(DHT11_GPIO_Port, &GPIO_InitStruct);DHT11_High();
}inline void DHT11_Rst()
{DHT11_OUT();DHT11_Low();osDelay(30);//根据时序图可知,需要至少拉低18msDHT11_High();std_delay_25us();//20-40us
}inline void DHT11_Check()
{DHT11_IN();while (DHT11_Read());while (!DHT11_Read());
}bool DHT11_Read_Data_Fast_Pro(float &temp, float &humi)
{static uint8_t buf[5];DHT11_Rst(); // 设置输出模式DHT11_Check();// 设置输入模式for (unsigned char & i : buf)// 读取40位数据{uint8_t data=0;for (uint8_t j = 0; j < 8; j++){data<<=1;while (DHT11_Read()) {} // 等待低电平while (!DHT11_Read()) {}// 等待变高电平// 开始读数据uint16_t time_count;for (time_count = 0; DHT11_Read(); ++time_count) {}data|=time_count>>10;// 由于事先已经知道一个为1194,一个为406左右}i = data;// 存储数据}if ((buf[0] + buf[1] + buf[2] + buf[3]) == buf[4]){humi = (buf[0]*10 + buf[1]) / 10.0f;temp = (buf[2]*10 + buf[3] ) / 10.0f;return true;}else{return false;}
}/********************下面为次优级优化********************/全局变量
//static uint8_t timeBuf[40];// 存储计数值
//static uint8_t timeBufIndex = 0;
//
//void DHT11_Read_Byte_Fast_Pro()
//{
// for (uint8_t i = 0; i < 8; i++)
// {
// while (DHT11_Read()) {} // 等待低电平
// while (!DHT11_Read()) {}// 等待变高电平
//
// // 开始读数据
// uint16_t time_count;
// for (time_count = 0; DHT11_Read(); ++time_count) {}
// timeBuf[timeBufIndex++] = time_count>>4;// 存储计数值,由于事先已经知道一个为875,一个为275左右,所以除以16
// }
//}
//
//bool DHT11_Read_Data_Fast_Pro(float &temp, float &humi)
//{
// static uint8_t buf[5];
//
// DHT11_Rst(); // 设置输出模式
// DHT11_Check();// 设置输入模式
//
// timeBufIndex = 0; // 重置计数值索引
// for (unsigned char &i: buf)// 读取40位数据
// {
// DHT11_Read_Byte_Fast_Pro();
// }
//
// uint16_t timeMax = 0;
// uint16_t timeMin = 0xFFFF;
// for (unsigned short i: timeBuf)
// {
// if (i > timeMax) timeMax = i;
// if (i < timeMin) timeMin = i;
// }
//
// uint16_t timeMed = (timeMax + timeMin) >> 1;// 取中位数
// for (uint8_t i = 0; i < 5; ++i)
// {
// uint8_t data = 0;
// for (uint8_t j = 0; j < 8; j++)
// {
// data <<= 1;
// data |= (timeBuf[i * 8 + j] > timeMed);
// }
// buf[i] = data;// 存储数据
// }
//
// if ((buf[0] + buf[1] + buf[2] + buf[3]) == buf[4])
// {
// humi = (buf[0]*10 + buf[1]) / 10.0f;
// temp = (buf[2]*10 + buf[3] ) / 10.0f;
// return true;
// }
// else
// {
// return false;
// }
//}//
//static uint16_t timeBuf[40];//存储计数值
//static uint8_t timeBufIndex = 0;
//void DHT11_Read_Byte_Fast_Pro()
//{
// for (uint8_t i = 0; i < 8; i++)
// {
// while (DHT11_Read())
// ;//等待低电平
// //变低了说明上一次数据位读取结束
//
// while (!DHT11_Read())
// ;//等待变高电平
// //变高了说明数据位读取开始
//
// /**开始读数据*/
// //低电平:26-28us 高电平:70us
// uint16_t time_count;
// for (time_count = 0; DHT11_Read(); ++time_count)
// ; //等待低电平
// timeBuf[timeBufIndex++] = time_count;//存储计数值//存储计数值
// }
//}
//
//
//bool DHT11_Read_Data_Fast_Pro(float &temp, float &humi)
//{
// static uint8_t buf[5];
//
// DHT11_Rst(); //在里面设置了输出模式
// DHT11_Check(); //在里面设置了输入模式
// // return false;//如果超时,则退出
// timeBufIndex = 0; //存储计数值索引
// for (unsigned char &i: buf)//读取40位数据
// {
// DHT11_Read_Byte_Fast_Pro();
// }
//
// uint16_t timeMax = 0;
// uint16_t timeMin = 0xFFFF;
// for (unsigned short i: timeBuf)
// {
// if (i > timeMax)
// {
// timeMax = i;
// }
// else if(i<timeMin)
// {
// timeMin = i;
// }
// }
//
// /**把计数值转为二进制数据*/
// uint8_t data; //临时数据
// uint16_t timeMed = (timeMax + timeMin) >> 1;//整除2,取中位数
// bool tempBin;
// for (uint8_t i = 0; i < 5; ++i)
// {
// data = 0;
// for (uint8_t j = 0; j < 8; j++)
// {
// data <<= 1;
// //比较计数值,读取二进制数据
// if (timeBuf[i * 8 + j] > timeMed)
// {
// tempBin = true;
// }
// else
// {
// tempBin = false;
// }
// data |= tempBin;
// }
// buf[i] = data;//存储数据
// }
//
// /**检验**/
// if ((buf[0] + buf[1] + buf[2] + buf[3]) == buf[4])
// {
// humi = (float) (buf[0] + buf[1] * 0.1);
// temp = (float) (buf[2] + buf[3] * 0.1);
// return true;
// }
// else
// {
// return false;
// }
//}/********************下面为原版优化********************/
//static uint16_t timeBuf[40];//存储计数值
//
//void DHT11_Read_Byte_Fast_Pro()
//{
// static uint8_t timeBufIndex = 0;//存储计数值索引
// for (uint8_t i = 0; i < 8; i++)
// {
// while (DHT11_Read())
// ;//等待低电平
// //变低了说明上一次数据位读取结束
//
// while (!DHT11_Read())
// ;//等待变高电平
// //变高了说明数据位读取开始
//
// /**开始读数据*/
// //低电平:26-28us 高电平:70us
// uint16_t time_count;
// for (time_count = 0; DHT11_Read(); ++time_count)
// ; //等待低电平
// timeBuf[timeBufIndex++] = time_count;//存储计数值
// }
//}
//
//
//bool DHT11_Read_Data_Fast_Pro(float &temp, float &humi)
//{
// static uint8_t buf[5];
// static uint16_t timeMax = 0;
// static uint16_t timeMin = 0xFFFF;
//
// DHT11_Rst(); //在里面设置了输出模式
// DHT11_Check(); //在里面设置了输入模式
// // return false;//如果超时,则退出
// for (unsigned char &i: buf)//读取40位数据
// {
// DHT11_Read_Byte_Fast_Pro();
// }
//
// for (unsigned short i: timeBuf)
// {
// if (i > timeMax)
// {
// timeMax = i;
// }
// else
// {
// timeMin = i;
// }
// }
// std_delay_25us();
// std_delay_25us();
// DHT11_OUT();
// DHT11_High();
//
//
// /**把计数值转为二进制数据*/
// uint16_t timeMed = (timeMax + timeMin) >> 1;//整除2,取中位数
// uint8_t data; //临时数据
// bool tempBin; //临时二进制数据
// for (int i = 0; i < 5; ++i)
// {
// data = 0;//重置
// for (int j = 0; j < 8; ++j)
// {
// data <<= 1;
// //比较计数值,读取二进制数据
// if (timeBuf[i * 8 + j] > timeMed)
// {
// tempBin = true;
// }
// else
// {
// tempBin = false;
// }
// data |= tempBin;
// }
// buf[i] = data;//存储数据
// }
//
// /**检验**/
// if ((buf[0] + buf[1] + buf[2] + buf[3]) == buf[4])
// {
// humi = (float) (buf[0] + buf[1] * 0.1);
// temp = (float) (buf[2] + buf[3] * 0.1);
// return true;
// }
// else
// {
// return false;
// }
//}相关文章:

参考——温湿度传感器DHT11驱动_STM32
设备:stm32f407ZGT6 环境:FreeRTOS HAL 到网上找DHT11的驱动,但是都无法使用。原因是RTOS环境中,由于多线程,使用循环计数阻塞式的delay_us延时函数就没那么准,且不同设备中delay_us的计数值不一样…...

架构每日一学 14:架构师如何进行可行性探索?
架构活动中,如果不进行可行性探索可能会导致重大失误,为企业发展带来风险。 可行性探索是架构活动的最后一个节点,在这之后的架构活动就像是离弦之箭,即便发现重大风险也很难再回头了。 互联网公司之间的竞争非常激烈࿰…...

多线程知识-13
为什么应该在循环中检查等待条件 为了实现多线程的同步和协调,通常使用等待和唤醒机制。在等待和唤醒机制中,等待条件是指一个线程等待某个条件的满足,当条件满足时,线程被唤醒继续执行。 在循环中检查等待条件的目的是为了避免虚…...

vue3+cli-service配置代理,跨域请求
一、配置代理端口和代理转发 在vue.config.js文件中 const {defineConfig} require(vue/cli-service)module.exports defineConfig({devServer: {host: 0.0.0.0,port: 8088, // 启动端口号proxy: {/api: { // 请求接口中要替换的标识target: , // 代理地址,后…...

git介绍、安装、配置
文章目录 1. GIT介绍2. 使用GIT的好处3. GIT 安装4. GIT 配置4.1 GIT 初始化设置、命令别名设置4.2 如果终端安装了oh-my-zsh,会带一堆git命令别名4.3 GIT配置文件介绍4.3.1 Linux、Mac OS系统4.3.2 windows系统 5. git设置远程仓库账号密码(拉取、上传代码不用输入…...

打开flutter调试
debugPaintSizeEnabled true; debugPaintBaselinesEnabled true;...
【前端 - Vue】Vuex基础入门,创建仓库的详细步骤
🚀 个人简介:6年开发经验,现任职某国企前端负责人,分享前端相关技术与工作常见问题~ 💟 作 者:前端菜鸟的自我修养❣️ 📝 专 栏:vue从基础到起飞 🌈 若有帮助&…...
#01 Stable Diffusion基础入门:了解AI图像生成
文章目录 前言什么是Stable Diffusion?Stable Diffusion的工作原理如何使用Stable Diffusion?Stable Diffusion的应用场景结论 前言 在当今迅速发展的人工智能领域,AI图像生成技术以其独特的魅力吸引了广泛的关注。Stable Diffusion作为其中的一项前沿技术&#…...

Knife4j使用
Knife4j使用 文章目录 Knife4j使用1、Knife4j介绍2、SpringBoot集成Knife4j3、基本使用 1、Knife4j介绍 Knife4j是一个用于生成和展示API文档的工具,同时它还提供了在线调试的功能,可以看作是Swagger的升级版,界面也比Swagger更好看…...

一文读懂银行承兑汇票:从申请到使用全攻略
银行承兑汇票(Banks Acceptance Bill,BA)是商业汇票的一种。它是由在承兑银行开立存款账户的存款人出票,向开户银行申请并经银行审查同意承兑的,保证在指定日期无条件支付确定的金额给收款人或持票人的票据。银行承兑汇…...

唯众智联网(AIoT)应用开发教学实训解决方案
一、引言 随着信息技术的飞速发展,物联网(IoT)和人工智能(AI)技术逐渐融合,形成了智联网(AIoT)这一新兴领域。智联网通过智能化设备、传感器、云计算等技术手段,实现了数…...

归纳跨域几种解决方案
什么是跨域? **说起跨域,就要知道什么是浏览器同源策略 **浏览器同源策略:必须是协议、域名、端口完全一致的才符合同源策略 **如果以上三项,有一项不同都涉及到跨域问题 为什么浏览器要设置同源策略呢? 没有同源策…...
)
LeetCode刷题第3题(C#)
给定一个字符串 s ,请你找出其中不含有重复字符的 最长子串的长度。 法一: 这道题用到的其实是滑动窗口。 滑动窗口算法是在特定窗口大小的数组或字符串上执行要求的操作。它可以将一部分问题中的嵌套循环转变为一个单循环,以此减少时间复…...
了解一下Ubuntu Linux
1.3.1 什么是Ubuntu Ubuntu这个名字非常神奇,它取自非洲南部祖鲁语的ubuntu,是一个哲学名称,其意思为“人性”或者“我的存在是因为大家的存在”。对于中国人来说,一般称呼它为乌班图。 Ubuntu是在Debian的基础上开发出来的&am…...

单一原则+干湿分离,让你的架构能力起飞
# 概念 软件单一原则(Single Responsibility Principle,SRP)是面向对象编程中五大基本设计原则之一。它指每个软件模块或类都应该只负责一个单一的功能或责任。 高内聚低耦合 实现代码可维护性 干湿分离是一种建筑设计和室内装修的方法,主…...

如何恢复永久删除的照片?
“嗨,我永久删除了电脑上的很多照片。回收站被清空,照片会永久丢失吗?有什么方法可以恢复这些已删除的照片吗? 我们所有人都经历过同样的事情:我们的硬盘上存储了文件、视频或照片,但不小心删除了它。这个…...
一文看懂llama2(原理模型训练)
自从Transformer架构问世以来,大型语言模型(Large Language Models, LLMs)以及AIGC技术的发展速度惊人,它们不仅在技术层面取得了重大突破,还在商业应用、社会影响等多个层面展现出巨大潜力。随着ChatGPT的推出&#x…...

Sui基金会公布2024年3–4月资助项目名单
Sui基金会宣布3月和4月的资助项目名单,在这两个月中,共有10个项目获得了资助,以加速Sui的整合和发展。其中有八个项目专注于为开发者创造更好的体验,从开发强大的集成开发环境(IDE)到使用零知识证明保护用户…...
Spring Security3.0.1版本
前言: 抽象Spring Security3.0上一篇 在上一篇中,我们完成了对Security导入,快速入门,和对自动配置的简单验证 对登录流程的分析和Security基本原理 补充: 先解决上一篇留下的问题,端口和端点的区别 端…...
网络报文协议头学习
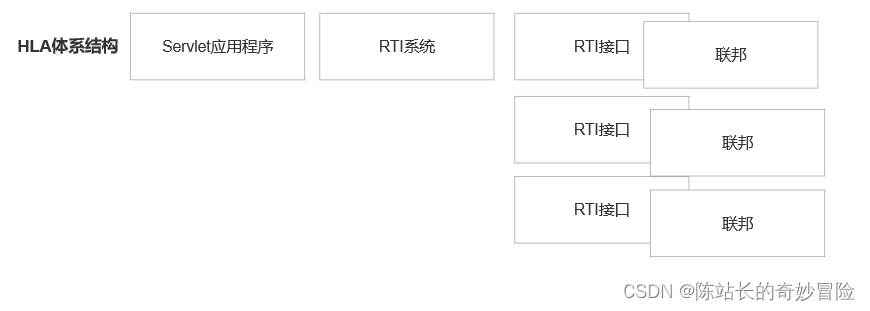
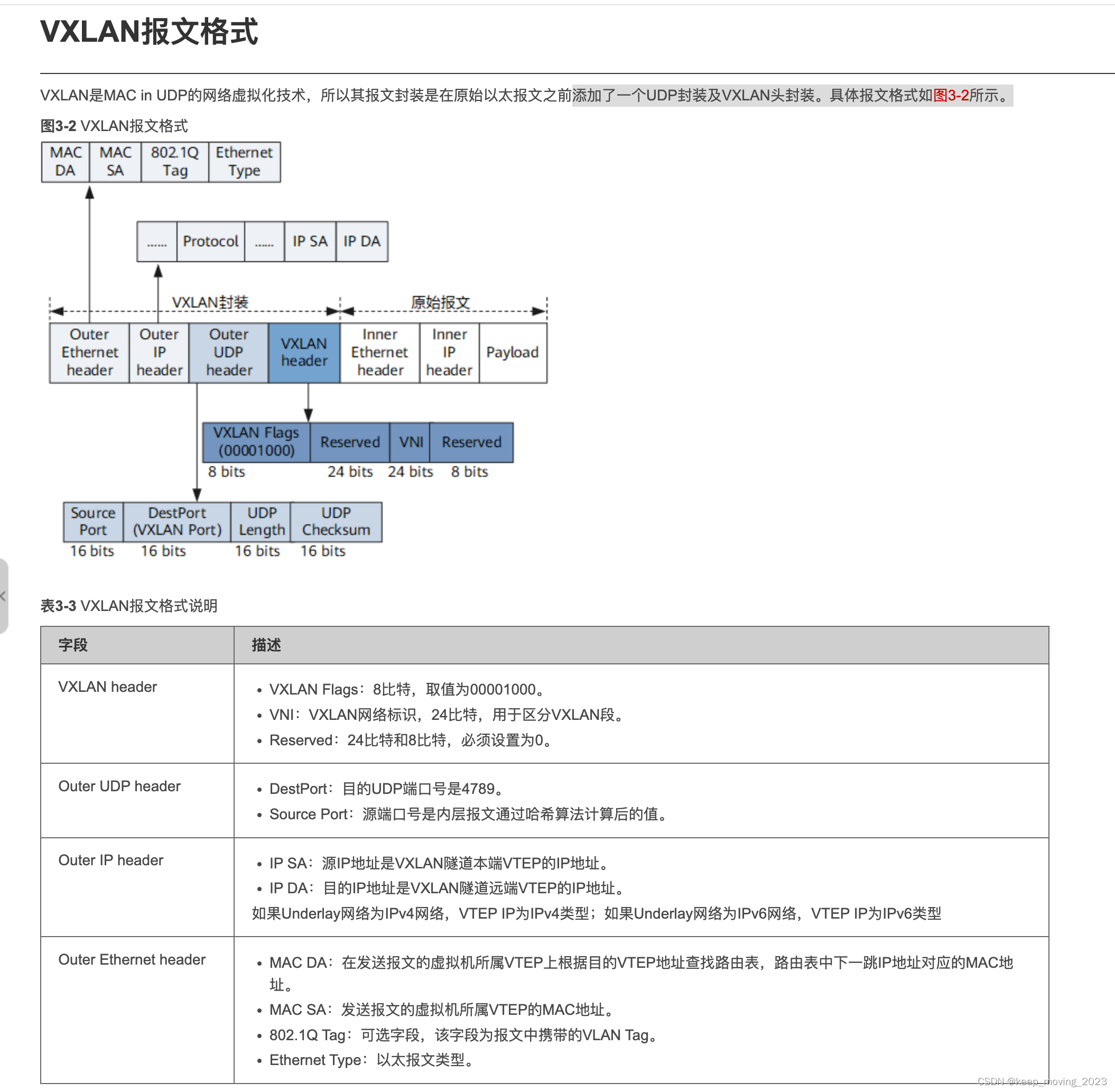
vxlan:就是通过Vxlan_header头在原始报文前面套了一层UDPIP(4/6)Eth_hdr 需求背景:VXLAN:简述VXLAN的概念,网络模型及报文格式_vxlan报文格式-CSDN博客 如果服务器作为VTEP,那从服务器发送到接…...

SaaS的末日重构:AI Agent浪潮下的危机与新生
目录 前言 一、 市场恐慌的源头:“软件-PE”的死亡循环 二、 核心重构:AI 将如何改造企业级 SaaS? 2.1 交互层的降维打击:从“点界面”到“说意图” 2.2 流程层的动态重组:从“应用中心”到“工作流中心” 2.3 定…...

开源吐槽大会:技术圈的幽默自省
开源项目吐槽大会技术文章大纲主题与目的开源项目吐槽大会旨在通过幽默、犀利的视角,揭示开源生态中的常见问题,促进开发者反思与改进。文章将从技术、社区、维护等角度展开,兼顾娱乐性与建设性。核心内容结构技术层面的经典槽点 依赖地狱&am…...
)
面相对象高级(static)
##静态(static)1.static修饰成员变量:类变量:有static修饰,属于类,在计算机里只有一份,会被类的全部对象共享因为属于类,需要通过类名就可以调用:类名.静态变量##### 实际…...
分享8款AI工具,毕业论文AIGC率速降至5%!)
(全网最全)分享8款AI工具,毕业论文AIGC率速降至5%!
【CSDN AI底层算法专栏 / 核心摘要】 2026年,学术圈的反AI审查已经演变成了一场“算法级别的军备竞赛”。随着知网、万方全面接入大模型语义探针,靠改同义词、甚至靠传统Prompt洗稿的套路已全线崩溃。为了帮大家避坑,本期专栏我从代码和算法逻…...

Qwen3.5-9B企业落地:制造业BOM表识别+物料替代方案生成实战
Qwen3.5-9B企业落地:制造业BOM表识别物料替代方案生成实战 1. 项目背景与价值 在制造业生产过程中,物料清单(BOM)管理和物料替代是常见的痛点问题。传统方式需要人工核对大量表格数据,效率低下且容易出错。Qwen3.5-9B作为90亿参数的开源大语…...

GME-Qwen2-VL-2B自动化测试:基于模型视觉理解的GUI界面测试脚本
GME-Qwen2-VL-2B自动化测试:基于模型视觉理解的GUI界面测试脚本 1. 引言 你有没有遇到过这样的场景?辛辛苦苦写了一套UI自动化测试脚本,结果软件界面稍微改个按钮颜色、挪个位置,整个测试就全挂了。维护成本高得吓人,…...

VCS编译SystemVerilog时,那个‘-P’选项你加对了吗?详解Verdi PLI配置
VCS编译SystemVerilog时,那个‘-P’选项你加对了吗?详解Verdi PLI配置 在芯片验证的日常工作中,VCSVerdi的组合堪称黄金搭档。但当你满怀信心地敲下编译命令,却发现怎么也生成不了关键的fsdb波形文件时,那种挫败感简直…...
)
管道应力理论(应用)
本文仅对管道应力涉及的理论知识(偏向于应用)进行简单介绍。管道应力:对管道应力校核是为了防止管壁内应力过大对管道造成破坏,不同的荷载引起不同类型的应力,在实际工程应用中,一般分为三种:一…...

离线语音智能处理平台Buzz:本地化音频转文本全攻略
离线语音智能处理平台Buzz:本地化音频转文本全攻略 【免费下载链接】buzz Buzz transcribes and translates audio offline on your personal computer. Powered by OpenAIs Whisper. 项目地址: https://gitcode.com/GitHub_Trending/buz/buzz 在当今信息驱动…...

koanf自定义Provider开发:扩展你的配置源终极指南
koanf自定义Provider开发:扩展你的配置源终极指南 【免费下载链接】koanf Simple, extremely lightweight, extensible, configuration management library for Go. Supports JSON, TOML, YAML, env, command line, file, S3 etc. Alternative to viper. 项目地址…...