PID算法在电机速度控制上的应用
目录
概述
1 系统硬件框架
1.1 框架介绍
1.2 硬件实物图
2 STM32Cub生成工程
2.1 软件版本信息
2.2 配置参数
编辑2.3 生成项目
3 PID算法实现
3.1 概念
3.2 代码实现
4 其他功能实现
4.1 设置电机速度
4.2 PID算法控制电机
4.3 功能函数的调用
5 测试
5.1 测试案例1
5.2 测试案例2
源代码下载地址:
PID算法在电机速度控制上的应-测试源码资源-CSDN文库
概述
本文主要介绍使用PID算法实现电机速度的控制,笔者使用IO外部中断测试码盘的脉冲实现测速功能,通过该速度值,应用PID算法实现调制PWM的占空比,以实现电机速度的控制。
1 系统硬件框架
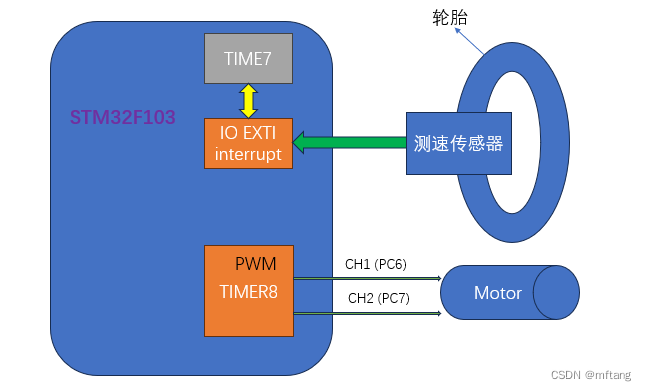
1.1 框架介绍
1) 系统使用光电编码器进行速度测试,具体实现方式可以参看原文:
电机转速计算(基于码盘和IO外部中断)-CSDN博客
2) TIMER7实现定时器功能,其会产生10us的定时器中断,为系统工作提供基准时钟。
3)TIMER8用于产生PWM实现电机速度控制,系统通过电机速度的反馈值以调节PWM的脉冲宽度,以实现电机速度的闭环控制。
1.2 硬件实物图
使用STM32F103RC作为主控芯片,LN298N用于驱动电机,光电码盘用于测试电机转速。具体的测试实物图如下: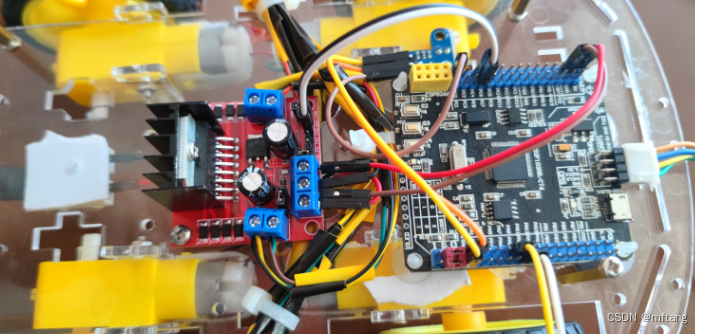
2 STM32Cub生成工程
2.1 软件版本信息
| 软件名称 | 版本信息 |
|---|---|
| STM32Cube | STM32CubeMX 6.11 |
| STM32 HAL | STM32Cube_FW_F1_V1.8.5 |
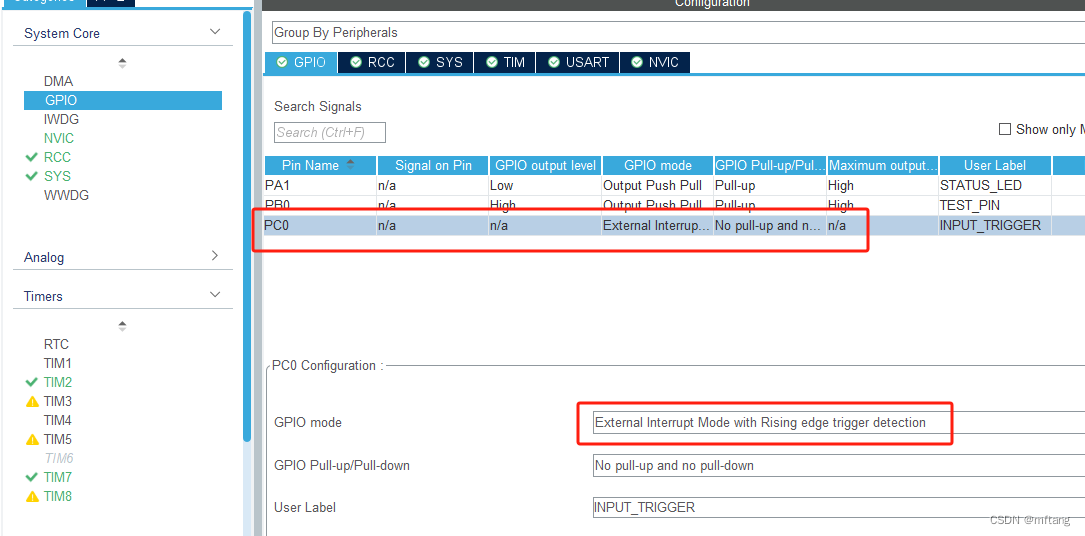
2.2 配置参数
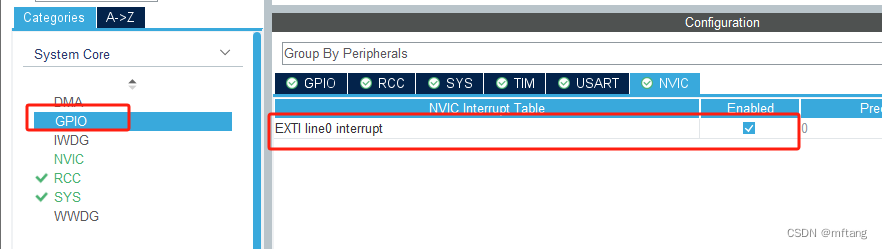
1)配置EXTI IO中断,其用测监测编码器的冲击脉冲,选择PC0接口,同时要使能外部中断函数
使能中断函数
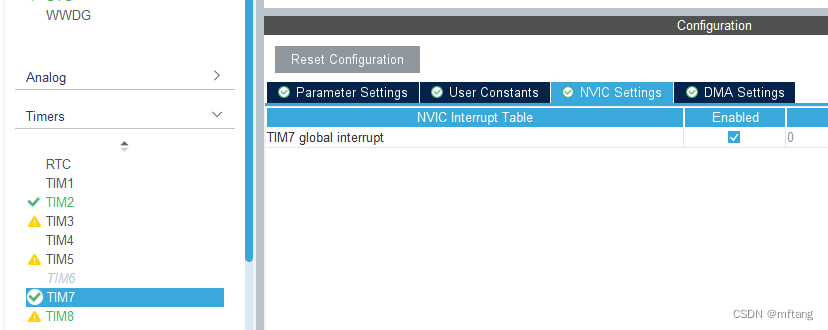
2)配置Timer7,中断间隔为10us,其具体配置参数如下:
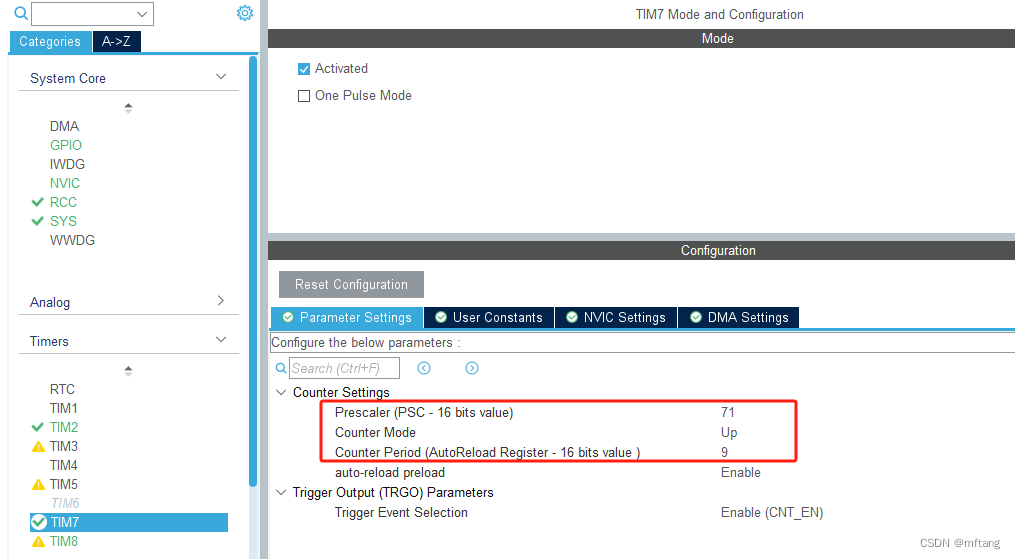
使能中断函数
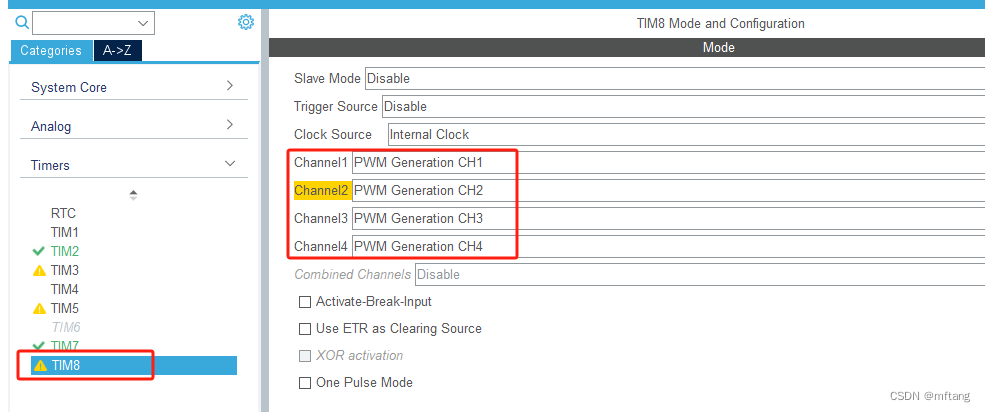
3)配置PWM相关的参数和使能通道
定时器相关的参数配置如下,计数周期为10ms

PWM通道相关的参数:

各个通道对应的IO接口如下:
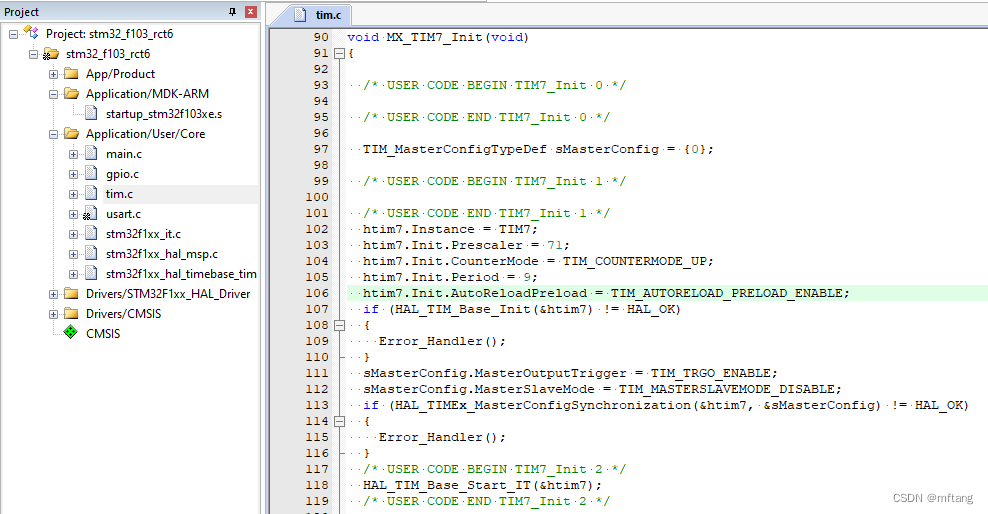
 2.3 生成项目
2.3 生成项目
配置完成各个参数后,就可以生成项目,打开项目后,其结构如下:
3 PID算法实现
3.1 概念
PID是一种常用的控制算法,全名为比例-积分-微分控制算法(Proportional-Integral-Derivative Control)。它通过对系统的误差进行比例、积分和微分运算,从而对系统进行控制。
PID控制算法的基本原理是:根据当前系统的误差,分别计算比例、积分和微分项,并将它们加权叠加作为最终的控制量。
具体来说,比例项(Proportional)是根据误差的大小与比例系数的乘积来计算的,它决定了控制量与误差之间的直接关系。比例项越大,控制量的调整越快。
积分项(Integral)是根据误差的累积进行计算的,它可以消除系统存在的静态误差,并且对于系统的稳定性有所影响。积分项越大,控制量的调整越缓慢。
微分项(Derivative)是根据误差的变化率进行计算的,它可以预测误差的未来变化趋势,并提前调整控制量。微分项越大,控制量的调整越灵敏。
PID算法的最终控制量是比例项、积分项和微分项的加权叠加,其中比例系数、积分系数和微分系数可以根据实际需求进行调整,以达到最佳的控制效果。
理想的PID控制算法:
• Kp —— 比例增益, Kp 与比例度成倒数关系
• Tt —— 积分时间常数
• TD —— 微分时间常数
• u(t)—— PID 控制器的输出信号
• e(t)—— 给定值 r(t)与测量值误差

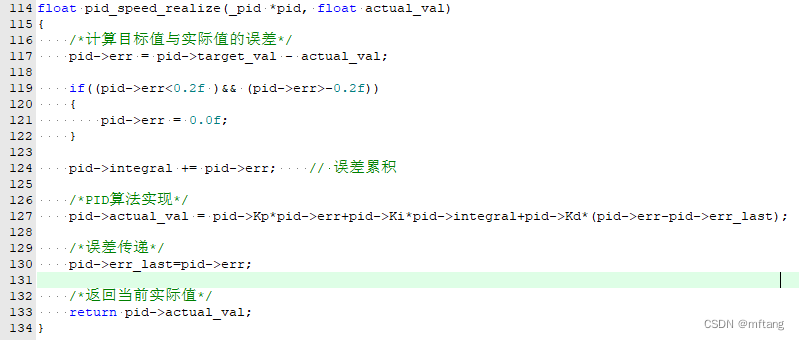
3.2 代码实现
代码117行: 计算目标值与实际值的误差
代码124行:累计误差值
代码127行:实现PID的功能
代码130行: 传递误差值
实际代码:
typedef struct
{float target_val; //目标值float actual_val; //实际值float err; //定义偏差值float err_last; //定义上一个偏差值float Kp,Ki,Kd; //定义比例、积分、微分系数float integral; //定义积分值
}_pid;/*** @brief 速度PID算法实现* @param actual_val:实际值@note 无* @retval 通过PID计算后的输出*/
float pid_speed_realize(_pid *pid, float actual_val)
{/*计算目标值与实际值的误差*/pid->err = pid->target_val - actual_val;if((pid->err<0.2f )&& (pid->err>-0.2f)){pid->err = 0.0f;}pid->integral += pid->err; // 误差累积/*PID算法实现*/pid->actual_val = pid->Kp*pid->err+pid->Ki*pid->integral+pid->Kd*(pid->err-pid->err_last);/*误差传递*/pid->err_last=pid->err;/*返回当前实际值*/return pid->actual_val;
}4 其他功能实现
4.1 设置电机速度
代码80行: 设置通道1的占空比值
代码81行: 设置通道2的占空比值为0,用于控制方向

实际代码:
void set_motor_speed( uint16_t actual_speed )
{HAL_TIM_SetPWM_Pulse( actual_speed, TIM_CHANNEL_1);HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_2);
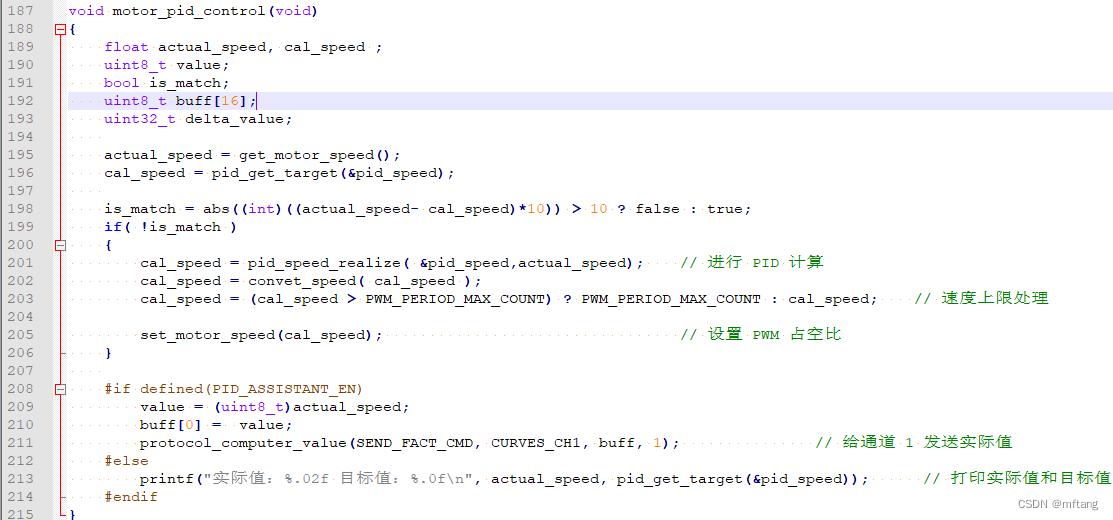
}4.2 PID算法控制电机
代码195行:获取当前电机的转速
代码198行:比较实际值和期望值的差值,便于将实际值控制在一定的范围之内
代码201行:使用实际值进行PID运行,计算出占空比的值,以调节转速
代码205行:设置电机速度
实际代码:
void motor_pid_control(void)
{float actual_speed, cal_speed ;uint8_t value;bool is_match;uint8_t buff[16];uint32_t delta_value;actual_speed = get_motor_speed();cal_speed = pid_get_target(&pid_speed);is_match = abs((int)((actual_speed- cal_speed)*10)) > 10 ? false : true;if( !is_match ){cal_speed = pid_speed_realize( &pid_speed,actual_speed); // 进行 PID 计算cal_speed = convet_speed( cal_speed );cal_speed = (cal_speed > PWM_PERIOD_MAX_COUNT) ? PWM_PERIOD_MAX_COUNT : cal_speed; // 速度上限处理set_motor_speed(cal_speed); // 设置 PWM 占空比}#if defined(PID_ASSISTANT_EN)value = (uint8_t)actual_speed;buff[0] = value;protocol_computer_value(SEND_FACT_CMD, CURVES_CH1, buff, 1); // 给通道 1 发送实际值#elseprintf("实际值:%.02f 目标值:%.0f\n", actual_speed, pid_get_target(&pid_speed)); // 打印实际值和目标值#endif
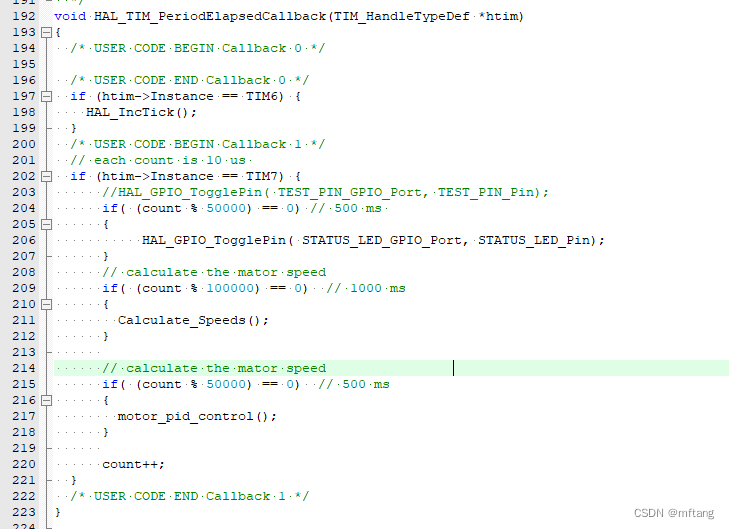
}4.3 功能函数的调用
代码211行:计算电机的转速
代码217行:电机PID控制函数
实际源码:
void motor_pid_control(void)
{float actual_speed, cal_speed ;uint8_t value;bool is_match;uint8_t buff[16];uint32_t delta_value;actual_speed = get_motor_speed();cal_speed = pid_get_target(&pid_speed);is_match = abs((int)((actual_speed- cal_speed)*10)) > 10 ? false : true;if( !is_match ){cal_speed = pid_speed_realize( &pid_speed,actual_speed); // 进行 PID 计算cal_speed = convet_speed( cal_speed );cal_speed = (cal_speed > PWM_PERIOD_MAX_COUNT) ? PWM_PERIOD_MAX_COUNT : cal_speed; // 速度上限处理set_motor_speed(cal_speed); // 设置 PWM 占空比}#if defined(PID_ASSISTANT_EN)value = (uint8_t)actual_speed;buff[0] = value;protocol_computer_value(SEND_FACT_CMD, CURVES_CH1, buff, 1); // 给通道 1 发送实际值#elseprintf("实际值:%.02f 目标值:%.0f\n", actual_speed, pid_get_target(&pid_speed)); // 打印实际值和目标值#endif
}5 测试
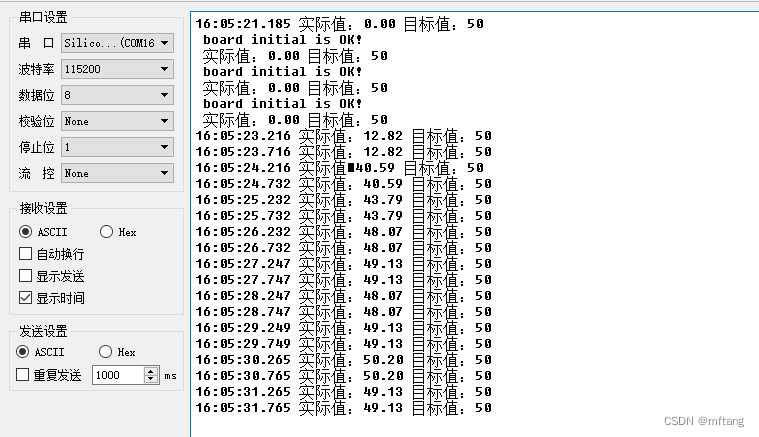
5.1 测试案例1
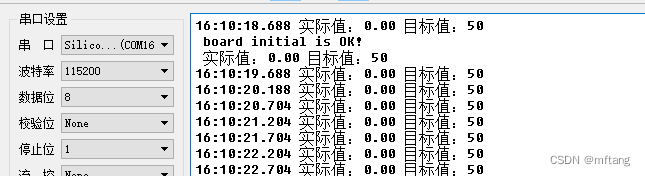
PID参数设置如下类型,观察速度值的变化(Expect value: speed = 50 )
pid_speed.Kp = 7.0;pid_speed.Ki = 20.0;pid_speed.Kd = 14.0;串口log如下,在5s左右就完成速度定速功能
5.2 测试案例2
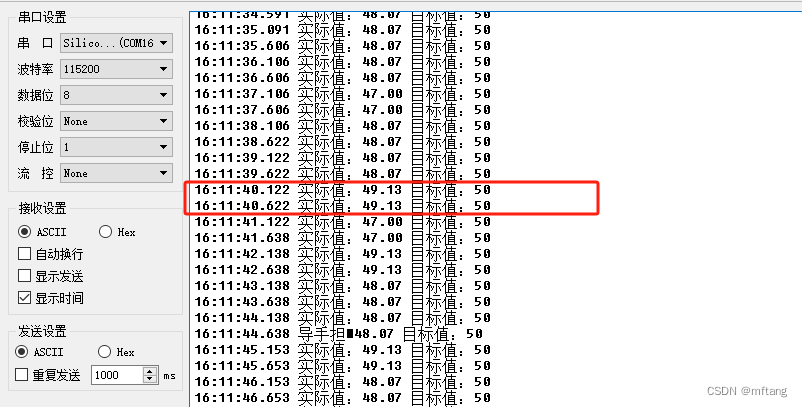
PID参数设置如下类型,观察速度值的变化(Expect value: speed = 50 )
pid_speed.Kp = 7.0;pid_speed.Ki = 2.0;pid_speed.Kd = 4.0;串口log如下,在2min左右才完成速度定速功能
相关文章:
PID算法在电机速度控制上的应用
目录 概述 1 系统硬件框架 1.1 框架介绍 1.2 硬件实物图 2 STM32Cub生成工程 2.1 软件版本信息 2.2 配置参数 编辑2.3 生成项目 3 PID算法实现 3.1 概念 3.2 代码实现 4 其他功能实现 4.1 设置电机速度 4.2 PID算法控制电机 4.3 功能函数的调用 5 测试 5.1 …...

埃隆·马斯克 - 从梦想家到改变世界的企业家
埃隆马斯克 - 从梦想家到改变世界的企业家 本文内容是埃隆马斯克传的重点章节精华提炼,介绍了马斯克传奇一生 参考资料内容:埃隆马斯克传&造梦者埃隆马斯克 参考资料在文末获取,关注我,分享优质前沿资料(IT、运…...

微信小程序长图片自适应
/*wxss中的代码*/ .image-container { display:flex;width: 100%; /* 或其他需要的宽度 */ /* margin-bottom: 10px; //图片之间的间距 */height: auto; } 核心:要真正自适应,就要在wxml中加入固定宽度style“width:750rpx” /*wxml中的代码*/ &l…...

elasticsearch hanlp 插件安装操作
elasticsearch hanlp 插件安装操作 下载 hanlp 插件上传hanlp插件到elasticsearch服务器安装hanlp插件kibana测试 下载 hanlp 插件 这里大家根据自己对应的 elasticsearch 版本下载匹配版本的 hanlp 插件,由于 hanlp 及 elasticsearch 各个版本之间差别较大&#x…...

为什么进程和线程 ID 总是 4 的倍数?
如果您研究下任务管理器中的的进程 ID (PID),则你会发现这样一个规律:它们都是 4 的倍数。 基于 Windows NT 内核的操作系统上,不止是进程 ID,实际上,线程 ID (TID) 也遵守这样的规律:也即它们都是 4 的倍…...
LabVIEW版本控制
LabVIEW作为一种流行的图形化编程环境,在软件开发中广泛应用。有效地管理版本控制对于确保软件的可靠性和可维护性至关重要。LabVIEW提供了多种方式来管理VI和应用程序的修订历史,以满足不同规模和复杂度的项目需求。 LabVIEW中的VI修订历史 LabVIEW内置…...

不输Kimi的AI插件——Elmo Chat (免费,无需注册)
🌚 前阵子不是写了篇《一分钟上手AI神器——Kimi (附_ 官方提示词)》 嘛,给大伙安利了一波 Kimi Chat 这个AI 神器,不知道是不是用户量上来了,算力一下子跟不上,感觉变笨了不少🤣。在别的推文看到多轮对话后…...
使用cesiumLab使shp转为3dtlies
过程不做赘述,网上大把,说下注意事项。 1. 存储3DTiles 选项 若是打开则输出的文件为glb格式文件,因为glb文件好储存易传输跨平台。cesium可以使用但无法处理,例如改变颜色,改着色器等。若是不打开则输出的文件为bm3d格式文件,此…...
中科数安 | 透明加密防泄密系统!如何有效防止企业内部核心数据资料外泄?
中科数安提供的透明加密防泄密系统是一种专为企业设计的数据保护解决方案,它通过以下关键特性有效防止企业内部核心数据资料外泄: PC地址:——www.weaem.com 自动智能透明加密:系统能够在操作系统级别无缝集成,对指定类…...
go的反射和断言
在go中对于一个变量,主要包含两个信息变量类型(type)和变量值(value) 可以通过reflect包在运行的时候动态获取变量信息,并能够进行操作 对于Type可以通过reflect.TypeOf()获取到变量的类型信息 reflect.Ty…...

打造新引擎,迈向数智金融新未来
数智技术正在全面赋能金融机构转型升级以及促进金融与实体经济的加速融合,已呈现出金融机构数智化经营加速、产业 数字金融深度融合、数字技术驱动绿色金融发展、金融信创成果涌现、金融机构加快数字化组织管理变革等行业趋势。 根据银行业协会调研,78%…...

广东智慧物流2024年端午节放假安排
广东智慧物流2024年端午节放假安排...
Facebook的隐私保护挑战:用户数据安全的新时代
在全球范围内,Facebook已经成为了不可忽视的社交媒体巨头,它连接着超过20亿的活跃用户。然而,随着其影响力的不断扩大,关于用户隐私和数据安全的问题也愈加引人关注。本文将深入探讨Facebook面临的隐私保护挑战,以及它…...
Gradio.NET:一个快速制作演示demo网页的利器
Gradio介绍 Gradio是一个用于创建机器学习模型交互界面的Python库。它允许开发者快速为他们的模型创建一个简单的web界面,以便于非技术用户和其他开发者进行交互和测试。 Gradio的主要优点是易用性和灵活性。你只需要几行代码就可以为你的模型创建一个交互界面。你…...
)
001 IOC与DI(有点杂)
文章目录 IOC与DI区别联系总结 依赖注入解耦管理对象的生命周期提高配置灵活性三种注入方式不可变对象的设计 构造器注入Setter方法注入字段注入Setter方法注入为什么不破坏封装性字段注入为什么破坏封装性为什么将字段或setter方法设置为private?总结 setter方法注…...

Python语言自学:深入探索四个基础、五个进阶、六个实战及七个挑战
Python语言自学:深入探索四个基础、五个进阶、六个实战及七个挑战 Python,作为一种通用编程语言,其简洁的语法、丰富的库和强大的功能,使得越来越多的人选择自学Python。但自学之路并非坦途,本文将从四个方面、五个方…...
运维开发介绍
目录 1.什么是运维开发 2.作用 3.优点 4.缺点 5.应用场景 5.1.十个应用场景 5.2.网站和Web应用程序 6.案例 7.小结 1.什么是运维开发 运维开发(DevOps)是一种结合软件开发(Development)与信息技术运维(Opera…...

Mac版的Typora的安装和激活(亲测可用哦~~~)
星光下的赶路人star的个人主页 珍视生活中的苦与乐,悦纳生活的悲伤离合 文章目录 1.下载2.安装3.激活4.注意点 1.下载 直接官网下载即可!!! 官网地址:typora官网 2.安装 直接拖进去安装即可 3.激活 1.利用访达进入…...

【Python系列】Python 方法变量参数详解
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...
生命在于学习——Python人工智能原理(3.2)
三、深度学习 (二)人工神经网络 人工神经网络是模仿人类大脑神经系统工作原理所创建的数学模型,有并行的分布处理能力、高容错性和自我学习等特征。 1、感知器 感知器由Frank Roseblatt于1957年提出,是一种广泛使用的线性分类…...

第06章langchain之向量化和向量数据库
01-文本视频图片向量化#主要做相似度查询(猜你喜欢)如何确定相似:既要看大小也要看方向对比图片:维度向量(嵌入)模型:02-向量数据库#相似性搜索不是准确搜索举例:举例2:#…...

BsMax:让3D艺术家无缝切换Blender的专业级工具集
BsMax:让3D艺术家无缝切换Blender的专业级工具集 【免费下载链接】BsMax BsMax Blender Addon (UI simulator/ Modeling/ Rigg & Animation/ Render Tools and ... 项目地址: https://gitcode.com/gh_mirrors/bs/BsMax 你是否曾经因为Blender的操作习惯与…...

人脸检测新突破:cv_resnet101_face-detection_cvpr22papermogface对戴口罩人脸识别率达91.3%
人脸检测新突破:cv_resnet101_face-detection_cvpr22papermogface对戴口罩人脸识别率达91.3% 你还在为人脸检测工具在复杂场景下“掉链子”而烦恼吗?比如合影里远处的小脸、侧脸,或者戴着口罩、被遮挡的人脸,传统工具常常识别不出…...

AI学习笔记二
一,NumPy库1,定义NumPy 是 Python 科学计算的核心库,专为多维数组(ndarray) 设计,比 Python 原生列表快 10~100 倍,是数据分析、机器学习、深度学习的基础。2,基础代码示例import nu…...

seo关键词挖掘工具哪个好_seo数据分析工具哪个最强
选择最佳SEO关键词挖掘工具和SEO数据分析工具指南 SEO关键词挖掘工具哪个好 在当今数字营销的竞争激烈环境中,选择合适的SEO关键词挖掘工具至关重要。这不仅能帮助你找到最相关、最受欢迎的关键词,还能显著提升你的网站流量和搜索引擎排名。市面上哪些…...

iOS应用免上架安装全攻略:从Ad Hoc到TestFlight的实战选择
1. iOS应用免上架安装的核心需求 对于iOS开发者来说,App Store并不是唯一的应用分发渠道。在实际开发过程中,我们经常需要在不上架的情况下将应用安装到测试设备或特定用户的手机上。这种需求主要来自几个典型场景: 首先是开发阶段的快速验证…...

从HTTP/3看TCP的困境:QUIC协议如何用UDP实现可靠传输?对比Wireshark抓包实例
HTTP/3时代TCP的困境与QUIC协议的革新之路 当你在手机上观看YouTube视频时,是否注意到缓冲速度比几年前快了许多?这背后隐藏着一场互联网传输协议的静默革命。传统TCP协议在移动互联网时代暴露出诸多局限性,而基于UDP的QUIC协议正在悄然改变游…...
)
吉他弹唱资源合集(第二辑)
吉他谱 文件大小: -内容特色: 海量吉他谱打包下载,流行经典一网打尽适用人群: 吉他初学者到进阶玩家核心价值: 省去找谱时间,直接打印练习下载链接: https://pan.quark.cn/s/7b801feec9f3 吉他教程合集 文件大小: -内容特色: 系统吉他教学视频谱例&am…...

3个核心功能让视频创作者内容采集效率提升300%的实战指南
3个核心功能让视频创作者内容采集效率提升300%的实战指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support. 抖音…...
)
STM32+LWIP实战:ETH外设配置避坑指南(基于HAL库)
STM32LWIP实战:ETH外设配置避坑指南(基于HAL库) 第一次在STM32上移植LWIP协议栈时,我盯着PHY芯片的Link灯整整三天没亮。直到发现CubeMX生成的代码里漏了一个关键寄存器配置——这个教训让我意识到,ETH外设的配置远不是…...