ceph radosgw 原有zone placement信息丢失数据恢复
概述
近期遇到一个故障环境,因为某些原因,导致集群原有zone、zonegroup等信息丢失(osd,pool等状态均健康)。原有桶和数据无法访问,经过一些列fix后修复, 记录过程
恢复realm和pool相关信息
重新初始化realm
radosgw-admin realm create --rgw-realm=zzrealm --default
创建zonegroup
radosgw-admin zonegroup create --rgw-realm=zzrealm --rgw-zonegroup=zzzonegroup --master --default
创建zone
radosgw-admin zone create --rgw-realm=zzrealm --rgw-zonegroup=zzzonegroup --rgw-zone=zzzone --master --default
如果realm,zonegroup以及zone和之前创建过程一样,则使用的indexpool和datapool和之前一致。如果发生了变化,则需要重新指定对应的池。
radosgw-admin zone placement modify --placement-id=default-placement --data-pool data-pool --index-pool index-pool
重启rgw实例
systemctl restart ceph-radosgw@.target
至此,索引和桶信息等数据恢复完成,通过s3cmd和s3browser都可以看到桶列表。
但访问桶内数据时候会报错。
ERROR: S3 error: 301 (Moved Permanently)
恢复旧桶的zonegroup id
虽然旧的桶无法访问,但仍可以创建新桶和访问新桶内数据,我们新建一个桶testnew。底层查看桶信息
radosgw-admin bucket stats --bucket=""
发现新桶和旧桶的zonegroup id不一致。

获取旧桶的桶id
radosgw-admin metadata get bucket:test
其中bucket_id的行就是桶id
导出旧桶配置
其中同名后面的一大长串为上一步查询的桶id
radosgw-admin metadata get bucket.instance:testnew:6a3071ed-d182-4bdd-9398-ab21f6bf4f9d.24280.7>> testnew.json
修改桶配置json文件
找到zonegroup这一行,编辑修改为与新桶一直,即新的zonegroup id。
桶配置json导回到桶
radosgw-admin metadata put bucket.instance:testnew:6a3071ed-d182-4bdd-9398-ab21f6bf4f9d.24280.7<testnew.json
然后重启rgw实例
至此完成数据访问恢复。
相关文章:
ceph radosgw 原有zone placement信息丢失数据恢复
概述 近期遇到一个故障环境,因为某些原因,导致集群原有zone、zonegroup等信息丢失(osd,pool等状态均健康)。原有桶和数据无法访问,经过一些列fix后修复, 记录过程 恢复realm和pool相关信息 重…...

【动手学深度学习】残差网络(ResNet)的研究详情
目录 🌊1. 研究目的 🌊2. 研究准备 🌊3. 研究内容 🌍3.1 残差网络 🌍3.2 练习 🌊4. 研究体会 🌊1. 研究目的 了解残差网络(ResNet)的原理和架构;探究残…...

freertos初体验 - 在stm32上移植
1. 说明 freertos内核 非常精简,代码量也很少,官方也针对主流的编译器和内核准备好了移植文件,所以 freertos 的移植是非常简单的,很多工具(例如CubeMX)点点鼠标就可以生成一个 freertos 的工程࿰…...

ubuntu使用 .deb 文件安装VScode
使用 .deb 文件安装 下载 VSCode 的 .deb 文件: wget -q https://go.microsoft.com/fwlink/?LinkID760868 -O vscode.deb使用 dpkg 安装: sudo dpkg -i vscode.deb如果有依赖项问题,使用以下命令修复: sudo apt-get install -f...
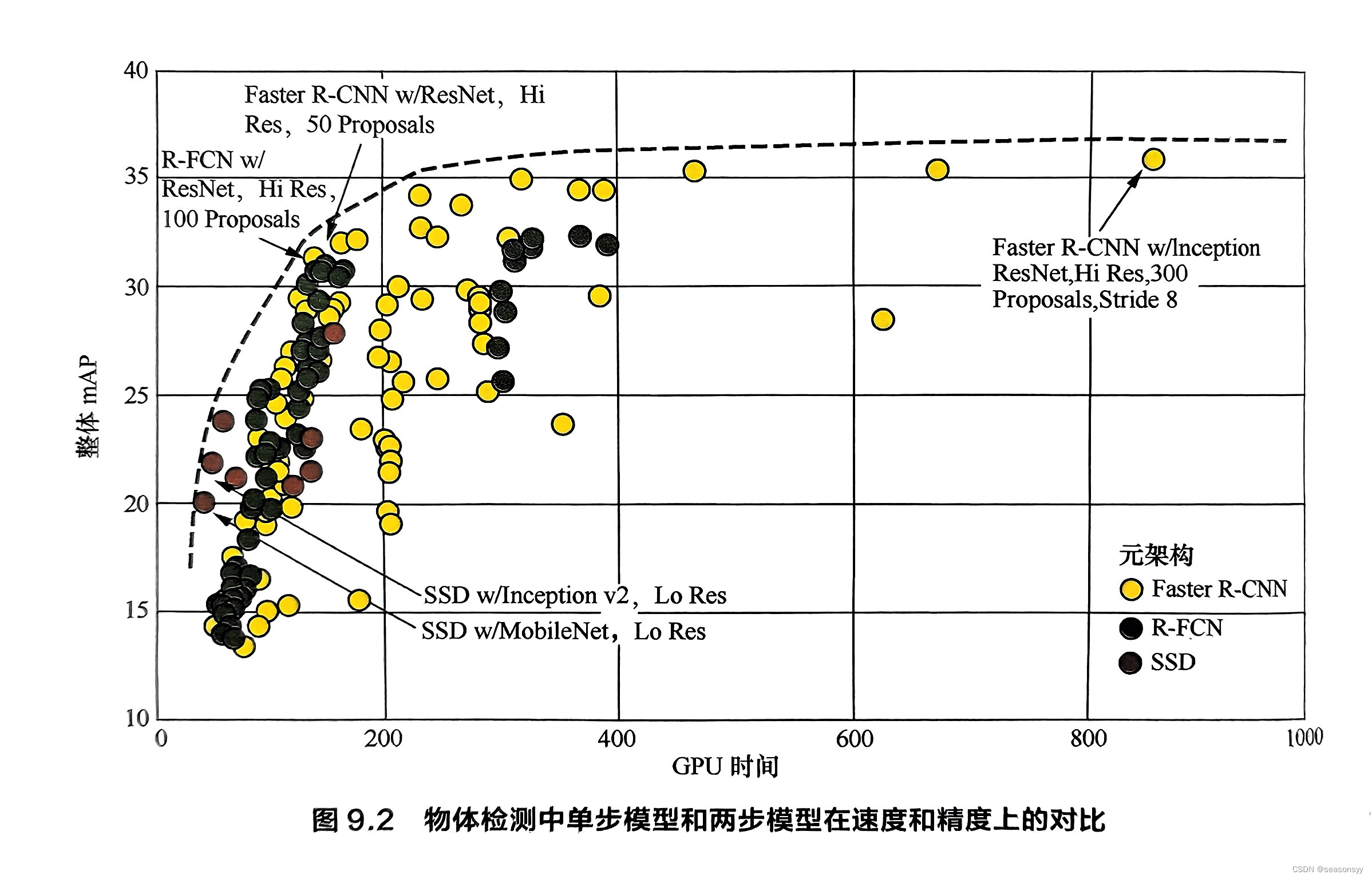
9.1.1 简述目标检测领域中的单阶段模型和两阶段模型的性能差异及其原因
9.1目标检测 场景描述 目标检测(Object Detection)任务是计算机视觉中极为重要的基础问题,也是解决实例分割(Instance Segmentation)、场景理解(Scene Understanding)、目标跟踪(Ob…...

系统化自学Python的实用指南
目录 一、理解Python与设定目标 二、搭建学习环境与基础准备 三、入门学习阶段 四、中级进阶阶段 五、项目实践与持续深化 六、持续学习与拓展 一、理解Python与设定目标 Python概述:详细介绍Python的历史沿革、设计理念、主要特点(如易读、易维护…...

加密货币初创企业指南:如何寻找代币与市场的契合点
撰文:Mark Beylin,Boost VC 编译:Yangz,Techub News 原文来源:香港Web3媒体Techub News 在 Y Combinator 创始人 Paul Graham 《Be Good》一文中概述了初创企业如何找到产品与市场契合点的方法,即制造人…...

【十二】图解mybatis日志模块之设计模式
图解mybatis日志模块之设计模式 概述 最近经常在思考研发工程师初、中、高级工程师以及系统架构师各个级别的工程师有什么区别,随着年龄增加我们的技术级别也在提升,但是很多人到了高级别反而更加忧虑,因为it行业35岁年龄是个坎这是行业里的共…...
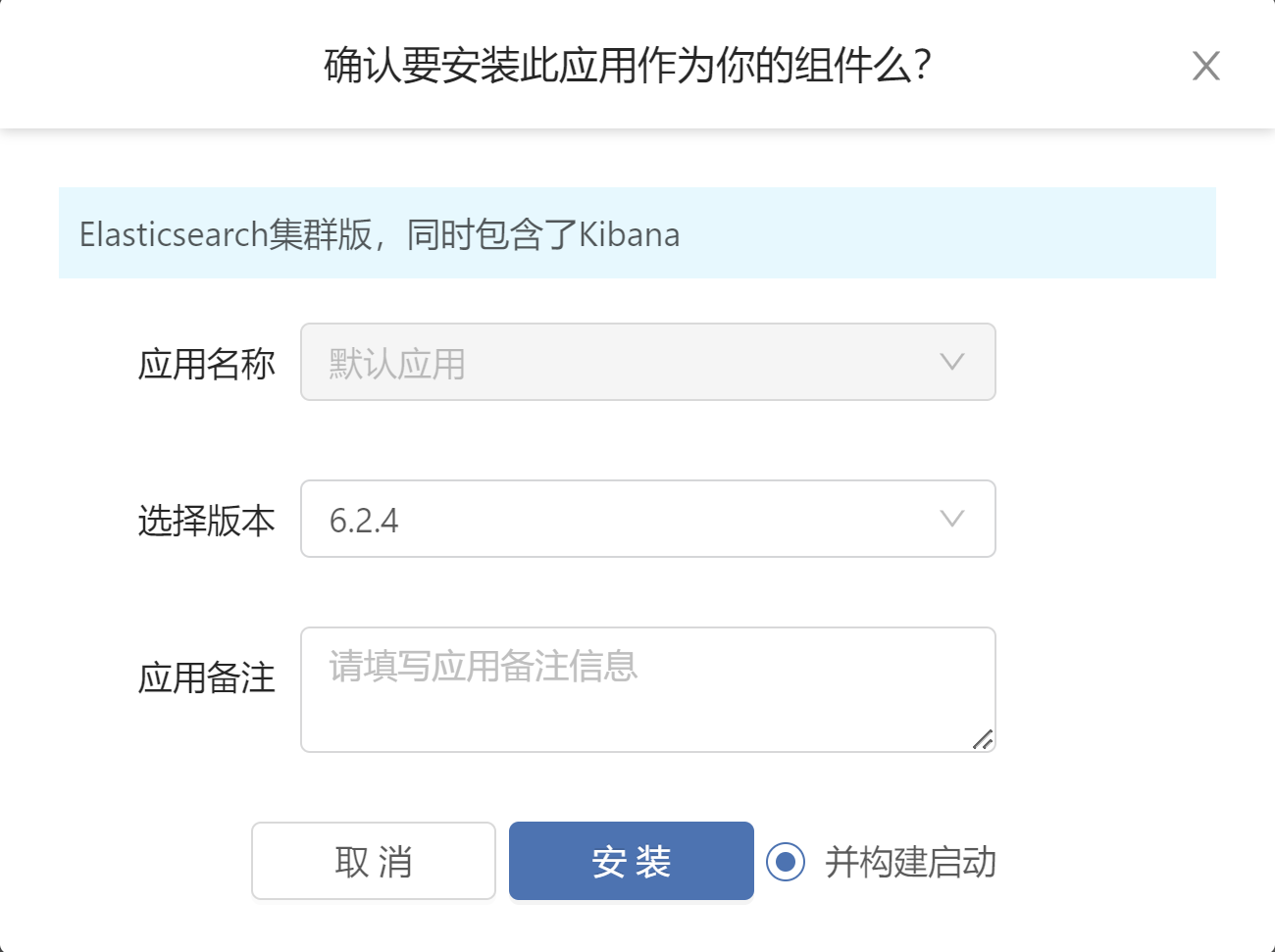
RainBond 制作应用并上架【以ElasticSearch为例】
文章目录 安装 ElasticSearch 集群第 1 步:添加组件第 2 步:查看组件第 3 步:访问组件制作 ElasticSearch 组件准备工作ElasticSearch 集群原理尝试 Helm 安装 ES 集群RainBond 制作 ES 思路源代码Dockerfiledocker-entrypoint.shelasticsearch.yml制作组件第 1 步:添加组件…...
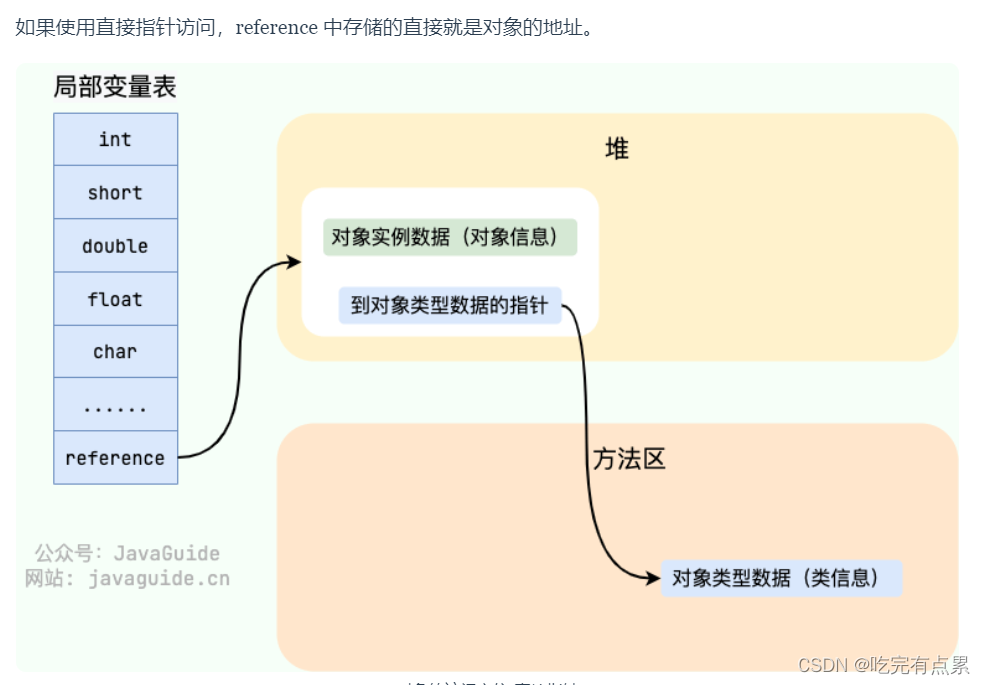
JVM相关:Java内存区域
Java 虚拟机(JVM)在执行 Java 程序的过程中会把它管理的内存划分成若干个不同的数据区域。 Java运行时数据区域是指Java虚拟机(JVM)在执行Java程序时,为了管理内存而划分的几个不同作用域。这些区域各自承担特定的任务,…...

【C++】─篇文章带你熟练掌握 map 与 set 的使用
目录 一、关联式容器二、键值对三、pair3.1 pair的常用接口说明3.1.1 [无参构造函数](https://legacy.cplusplus.com/reference/utility/pair/pair/)3.1.2 [有参构造函数 / 拷贝构造函数](https://legacy.cplusplus.com/reference/utility/pair/pair/)3.1.3 [有参构造函数](htt…...
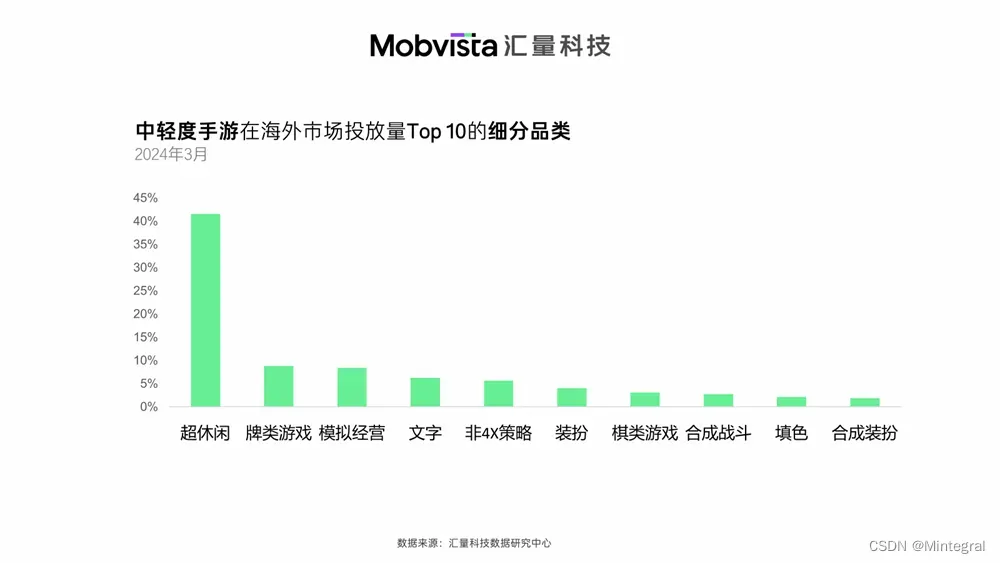
Mintegral数据洞察:全球中轻度游戏市场与创意更新频率
基于2024年3月大盘数据,汇量科技数据研究中心发现,超休闲品类仍是投流中轻度手游的中流砥柱。而投流力度较大的其他细分品类里,可以看到棋牌、模拟经营、非4X策略以及合成X游戏的身影,这些品类是近年来经常出现融合玩法的新兴赛道…...
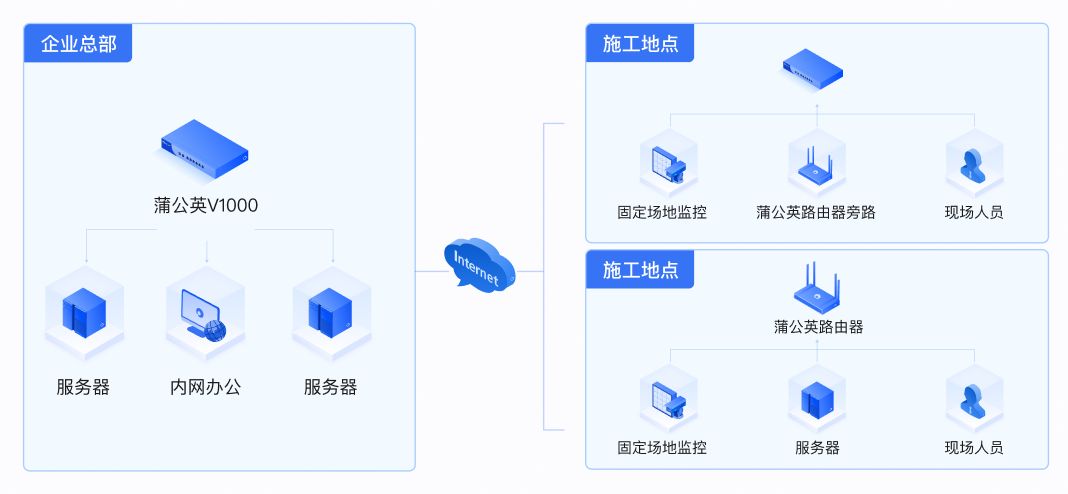
贝锐蒲公英异地组网:降低建筑工地远程视频监控成本、简化运维
中联建设集团股份有限公司是一家建筑行业的施工单位,专注于建筑施工,业务涉及市政公用工程施工总承包、水利水电工程施工总承包、公路工程施工总承包、城市园林绿化专业承包等,在全国各地开展有多个建筑项目,并且项目时间周期可能…...

大模型训练学习笔记
目录 大模型的结构主要分为三种 大模型分布式训练方法主要包括以下几种: token Token是构成句子的基本单元 1. 词级别的分词 2. 字符级别的分词 结巴分词 GPT-3/4训练流程 更细致的教程,含公式推理 大模型的结构主要分为三种 Encoder-only(自编…...

Linux C/C++时间操作
C11提供了操作时间的库chrono库,从语言级别提供了支持chrono库屏蔽了时间操作的很多细节,简化了时间操作 Unix操作系统根据计算机产生的年代把1970年1月1日作为UNIX的纪元时间,1970年1月1日是时间的中间点,将从1970年1月1日起经过…...

AI绘画工具
AI绘画工具:技术与艺术的完美融合 一、引言 随着人工智能技术的飞速发展,AI绘画工具作为艺术与技术结合的产物,已经逐渐从科幻的概念变成了现实。这些工具不仅改变了传统绘画的创作方式,还为人们带来了全新的艺术体验。本文将详…...

图相似度j计算——SimGNN
图相似性——SimGNN 论文链接:个人理解:数据处理: feature_1 [[1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], # "A"[0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0], # "B"[0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0] # "C" 第二个循环ÿ…...

大模型创新企业集结!百度智能云千帆AI加速器Demo Day启动
新一轮技术革命风暴席卷而来,为创业带来源源不断的创新动力。过去一年,在金融、制造、交通、政务等领域,大模型正从理论到落地应用,逐步改变着行业的运作模式,成为推动行业创新和转型的关键力量。 针对生态伙伴、创业…...

阿里云对象存储oss——对象储存原子性和强一致性
在阿里云对象存储oss中有俩个很重要的特性分别是原子性和强一致性。 原子性 首先我们先聊一下原子性,在计算机科学中,原子性(Atomicity)是指一个操作是不可分割的最小执行单元,要么完全执行,要么完全不执行…...

星戈瑞 CY5-地塞米松的热稳定性
CY5-地塞米松作为一种结合了荧光染料CY5与药物地塞米松的复合标记物,其热稳定性是评估其在实际应用中能否保持结构完整和功能稳定的参数。 热稳定性的重要性 热稳定性是指物质在受热条件下保持其物理和化学性质不变的能力。对于CY5-地塞米松而言,良好的…...

ESLint-Plugin-Unicorn规则优先级设置终极指南:如何平衡代码质量和开发效率
ESLint-Plugin-Unicorn规则优先级设置终极指南:如何平衡代码质量和开发效率 【免费下载链接】eslint-plugin-unicorn More than 100 powerful ESLint rules 项目地址: https://gitcode.com/gh_mirrors/es/eslint-plugin-unicorn ESLint-Plugin-Unicorn是一个…...

CLIP图文匹配测试工具:5分钟本地部署,零基础验证AI识图能力
CLIP图文匹配测试工具:5分钟本地部署,零基础验证AI识图能力 1. 工具简介与核心价值 你是否遇到过这样的场景:手头有一批产品图片,需要快速判断它们与哪些文字描述最匹配?或者想验证AI模型是否能准确理解图片内容&…...

基于IEEE39节点系统的风力发电机组并网改造与稳定性研究
基于IEEE39节点系统的风力发电机组并网改造与稳定性研究 摘要 随着可再生能源在电力系统中占比的不断提升,风电并网技术已成为电力系统领域的研究热点。本文针对IEEE39节点标准测试系统,将其工作频率从60Hz改造为50Hz,并将30、32、34、37号节点的同步发电机分别替换为不同…...
)
UE5材质编辑器进阶:手把手教你创建并调用自定义ush函数库(附避坑指南)
UE5材质编辑器进阶:打造高效可复用的自定义ush函数库 在虚幻引擎5的材质创作中,重复编写相同的HLSL代码不仅效率低下,还容易引入错误。本文将带你深入理解如何创建并调用自定义ush函数库,提升材质开发的专业性和可维护性。 1. 为什…...

Janus-Pro-7B开发者案例:基于Gradio API构建私有AI内容中台
Janus-Pro-7B开发者案例:基于Gradio API构建私有AI内容中台 1. 项目概述 Janus-Pro-7B是DeepSeek发布的一款统一多模态理解与生成模型,它通过创新的架构设计解决了传统模型在理解与生成任务上的冲突问题。该模型支持图像问答、OCR识别、图表分析等理解…...

从编译到定制:WinSCP全流程开发指南
从编译到定制:WinSCP全流程开发指南 【免费下载链接】winscp WinSCP is a popular free file manager for Windows supporting SFTP, FTP, FTPS, SCP, S3, WebDAV and local-to-local file transfers. A powerful tool to enhance your productivity with a user-fr…...
:渐进式任务学习框架在行人轨迹预测中的实践与优化)
轨迹预测新范式(ECCV’24):渐进式任务学习框架在行人轨迹预测中的实践与优化
1. 行人轨迹预测的挑战与渐进式学习框架的诞生 预测行人未来轨迹一直是计算机视觉和智能体交互领域的核心难题。想象一下,当你走在拥挤的商场里,大脑会不自觉地预测周围行人的移动方向——这种看似简单的行为,对AI系统来说却需要处理复杂的时…...

终极指南:快速掌握OpenNI2深度相机开发框架
终极指南:快速掌握OpenNI2深度相机开发框架 【免费下载链接】OpenNI2 项目地址: https://gitcode.com/gh_mirrors/op/OpenNI2 OpenNI2是一个功能强大的开源跨平台框架,专门用于深度相机和传感器设备的驱动开发与应用程序构建。这个完整的自然交互…...

Virtual-Display-Driver:Windows虚拟显示器的全能解决方案深度解析
Virtual-Display-Driver:Windows虚拟显示器的全能解决方案深度解析 【免费下载链接】Virtual-Display-Driver Add virtual monitors to your windows 10/11 device! Works with VR, OBS, Sunshine, and/or any desktop sharing software. 项目地址: https://gitco…...

信号处理中的数字滤波器设计策略指南:从理论到实际应用
信号处理中的数字滤波器设计策略指南:从理论到实际应用 【免费下载链接】gnuradio GNU Radio – the Free and Open Software Radio Ecosystem 项目地址: https://gitcode.com/gh_mirrors/gn/gnuradio 在现代通信系统和信号处理应用中,数字滤波器…...