DDS自动化测试落地方案 | 怿星科技携最新技术亮相是德科技年度盛会

5月28日,怿星科技作为是德科技的重要合作伙伴亮相Keysight World Tech Day 2024。在此次科技盛会上,怿星科技不仅展示了领先的DDS自动化测试解决方案等前沿技术,还分享了在“周期短、任务重”的情况下,如何做好软件开发和测试验证并降低研发成本的宝贵经验。
怿星科技DDS自动化测试解决方案
怿星科技联合业界主流的OEM和DDS供应商开发了一套完整的DDS测试规范和测试工具SmartDDS,有助于OEM和Tier1在DDS研发过程中提升测试完整性和开发效率。怿星科技对DDS测试内容包含:
- 协议一致性测试
- 通信及交互功能测试
- 性能及稳定性测试
- 异构网络下的通信验证
具体内容可参考《DDS只测这四项,就够了!》
SmartDDS
SmartDDS是怿星科技基于DDS相关实现标准以及在车载通信应用上的具体实现,并结合以往测试经验,完全自研开发的一套支持DDS中间件的功能及性能特性的全覆盖测试验证产品,以确保DDS在车载通信应用下的应用场景正常落地。
目前SmartDDS能够完全覆盖上述协议一致性、通信机交互功能、性能及稳定性及异构网络下的通信验证四部分测试内容。如下为SmartDDS测试软件主体,具有查看用例步骤、配置用例参数、用例的执行和停止、显示实时日志以及查看测试报告等功能。且测试软件界面简单、操作便捷,测试代码可读性强、易于二次拓展开发。
SmartDDS交付物包括:
- 测试规范:测试规范说明测试执行的软硬件环境,详细描述各测试用例的测试目的、测试步骤和评价标准
- DIT组件:SmartDDS通过DIT组件(DDS Inner Tester)调用DDS接口
- 测试软件:SmartDDS
助力客户降本增效的产品体系

为帮助客户在“周期短、任务重”的情况下,做好软件开发和测试验证并降低研发成本。成立至今,怿星科技围绕“让智能汽车软件研发更高效”的目标,依托对车载网络通信技术和智能座舱3D HMI技术的深入研究,打造了研发工具链、嵌入式软件、自动化测试设备三大类产品矩阵,同时结合定制化服务,为用户在车载通信、智能座舱、自动驾驶等业务场景提供“产品+服务”的 “交钥匙服务”,已为超过500汽车行业客户提供专业支撑。
面向未来,怿星科技将持续聚焦智能汽车软件新基建,紧密围绕汽车软件研发过程中的难点问题,不断开发新产品,以新质生产力助力汽车软件行业高速发展。
相关文章:
DDS自动化测试落地方案 | 怿星科技携最新技术亮相是德科技年度盛会
5月28日,怿星科技作为是德科技的重要合作伙伴亮相Keysight World Tech Day 2024。在此次科技盛会上,怿星科技不仅展示了领先的DDS自动化测试解决方案等前沿技术,还分享了在“周期短、任务重”的情况下,如何做好软件开发和测试验证…...
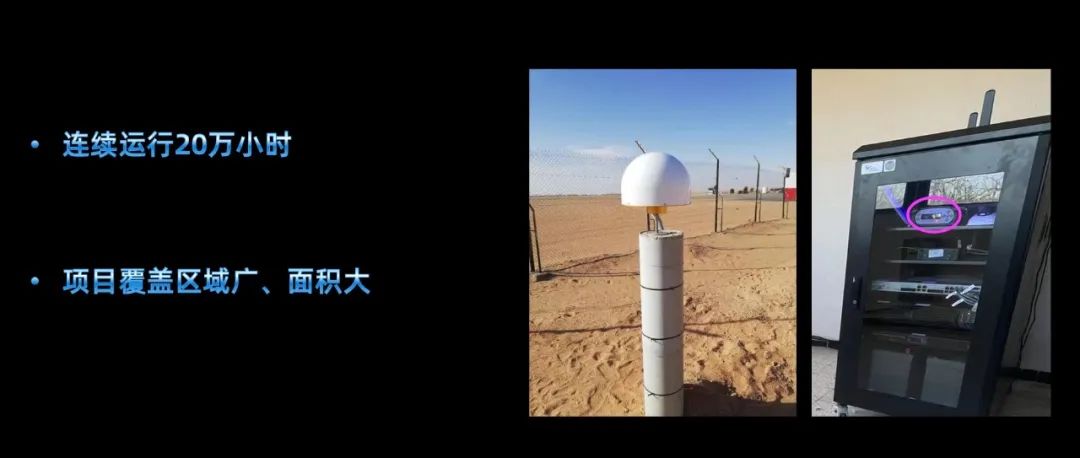
新品!和芯星通全系统全频高精度板卡UB9A0首发
6月6日,和芯星通发布了UB9A0全系统全频高精度GNSS板卡,主要应用于CORS站、便携基站、GNSS全球监测跟踪站等。延续了上一代产品高质量原始观测量的特点,UB9A0在性能和稳定性方面均表现出众。 UB9A0基于射频基带及高精度算法一体化的GNSS SoC芯…...

Cognita RAG:模块化、易用与可扩展的开源框架
Cognita RAG是一个开源框架,它通过模块化设计、用户友好的界面和可扩展性,简化了将领域特定知识整合到通用预训练语言模型中的过程。本文介绍了Cognita的特点、优势、应用场景以及如何帮助开发者构建适合生产环境的RAG应用程序。 文章目录 Cognita RAG介…...

linux虚拟机免密登录配置
1、假设A服务器要免密登录B服务器 2、在A服务器上执行命令: cd /root/.ssh/ ssh-keygen -t rsa #这里会生成两个文件 一个是id_rsa私钥和公钥rsa.pub2、我们把公钥的内容复制粘贴到B服务器的/root/.ssh/authorized_keys文件下 #在A服务器上执行命令记录内容 cat …...
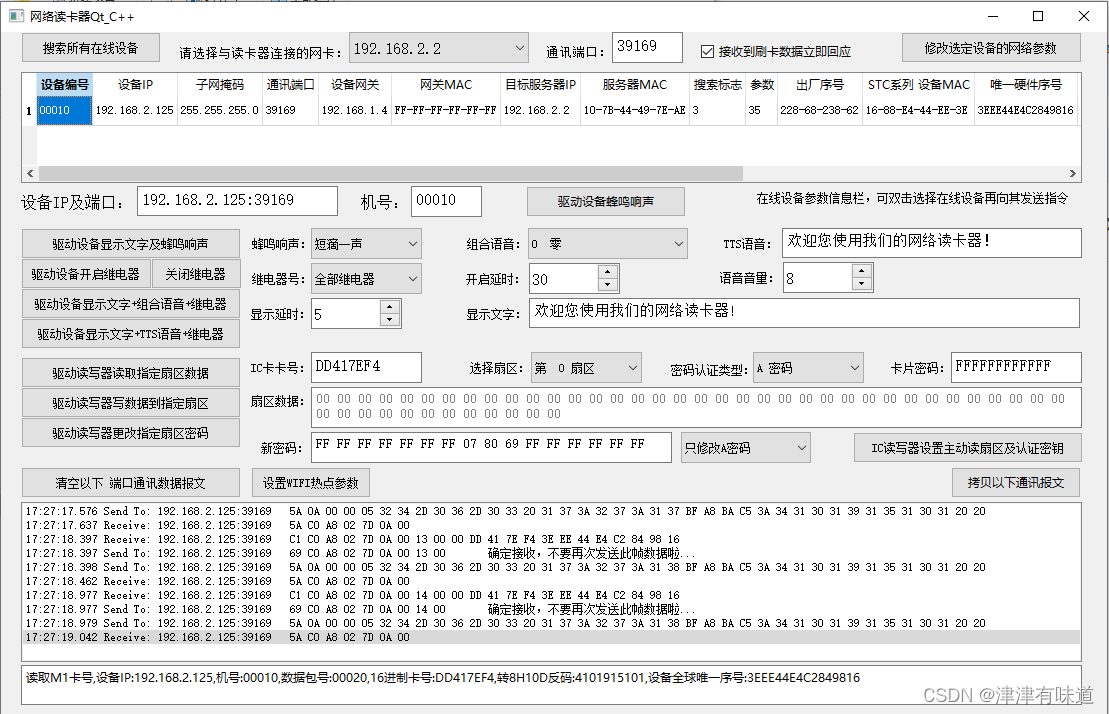
Qt_C++ RFID网络读卡器Socket Udp通讯示例源码
本示例使用的设备: WIFI/TCP/UDP/HTTP协议RFID液显网络读卡器可二次开发语音播报POE-淘宝网 (taobao.com) #ifndef MAINWINDOW_H #define MAINWINDOW_H#include <QMainWindow> #include <QHostInfo> #include <QNetworkInterface> #include <…...

C++ 实现Python 列表list 的两种方法
1、vector里面放多种参数。在C中,如果你想要在std::vector中存储不同类型的参数,你可以使用std::any(C17及以上)或std::variant(C17以前的版本需要使用Boost库或者C17及以上标准)。以下是使用std::vector&l…...
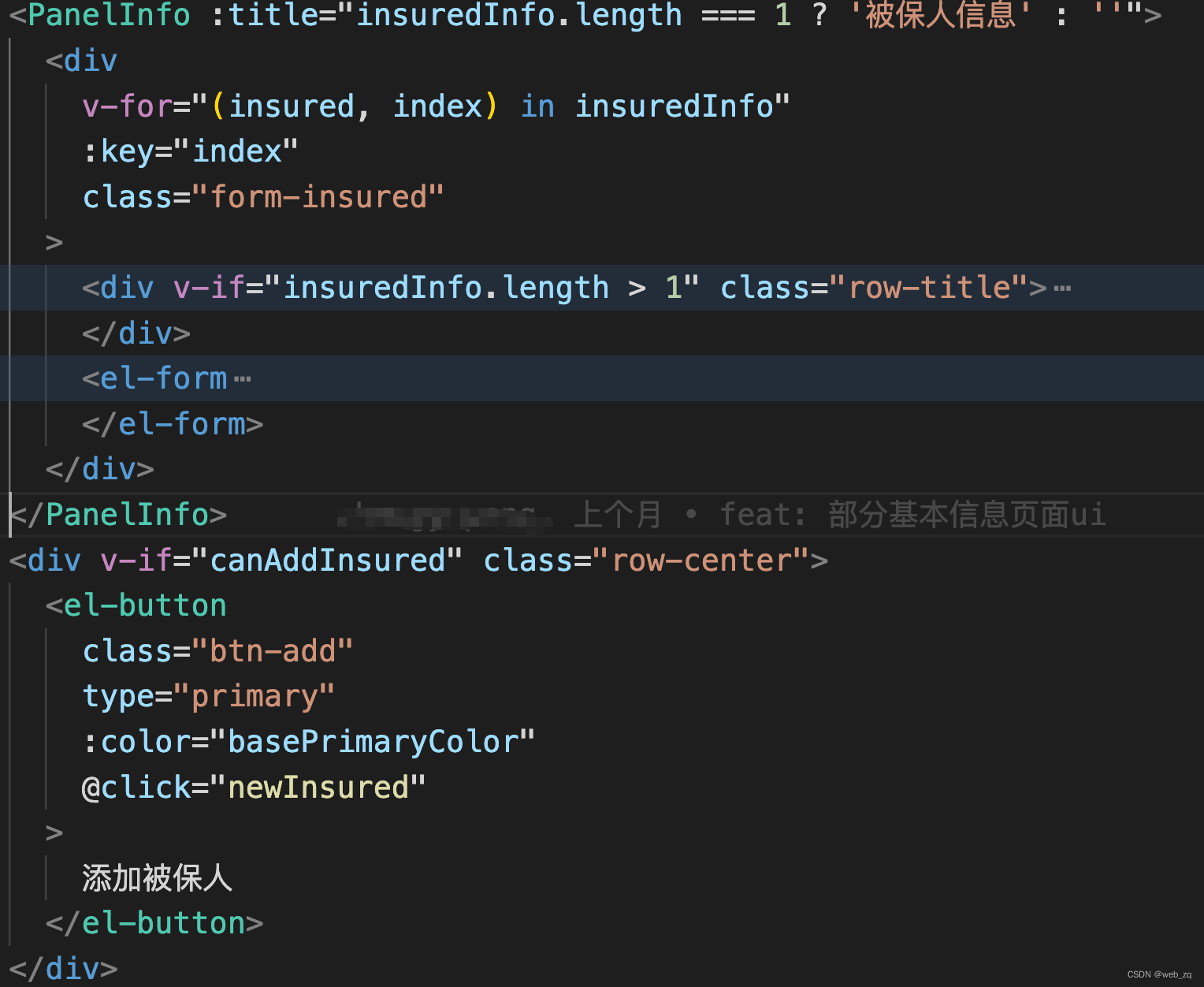
vue3+ elementPlus PC端开发 遇到页面已进入就form校验了的问题
form表单一进页面就校验了 rules里配置的 require 提示语 如图所示代码是这样的 最后发现是form表单下面的一个按钮的展示规则 会导致规则校验 canAddInsured 这个字段的变化会导致form表单校验 这个字段是computed maxInsureds 也是个computed监听 maxInsured.value >1 就…...
transformers DataCollator介绍
本博客主要介绍 transformers DataCollator的使用 from transformers import AutoTokenizer, AutoModel, \DataCollatorForSeq2Seq, DataCollatorWithPadding, \DataCollatorForTokenClassification, DefaultDataCollator, DataCollatorForLanguageModelingPRETRAIN_MODEL &qu…...
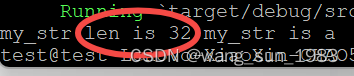
rust学习(字节数组转string)
最新在写数据传输相关的操作,发现string一个有趣的现象,代码如下: fn main() {let mut data:[u8;32] [0;32];data[0] a as u8;let my_str1 String::from_utf8_lossy(&data);let my_str my_str1.trim();println!("my_str len is…...
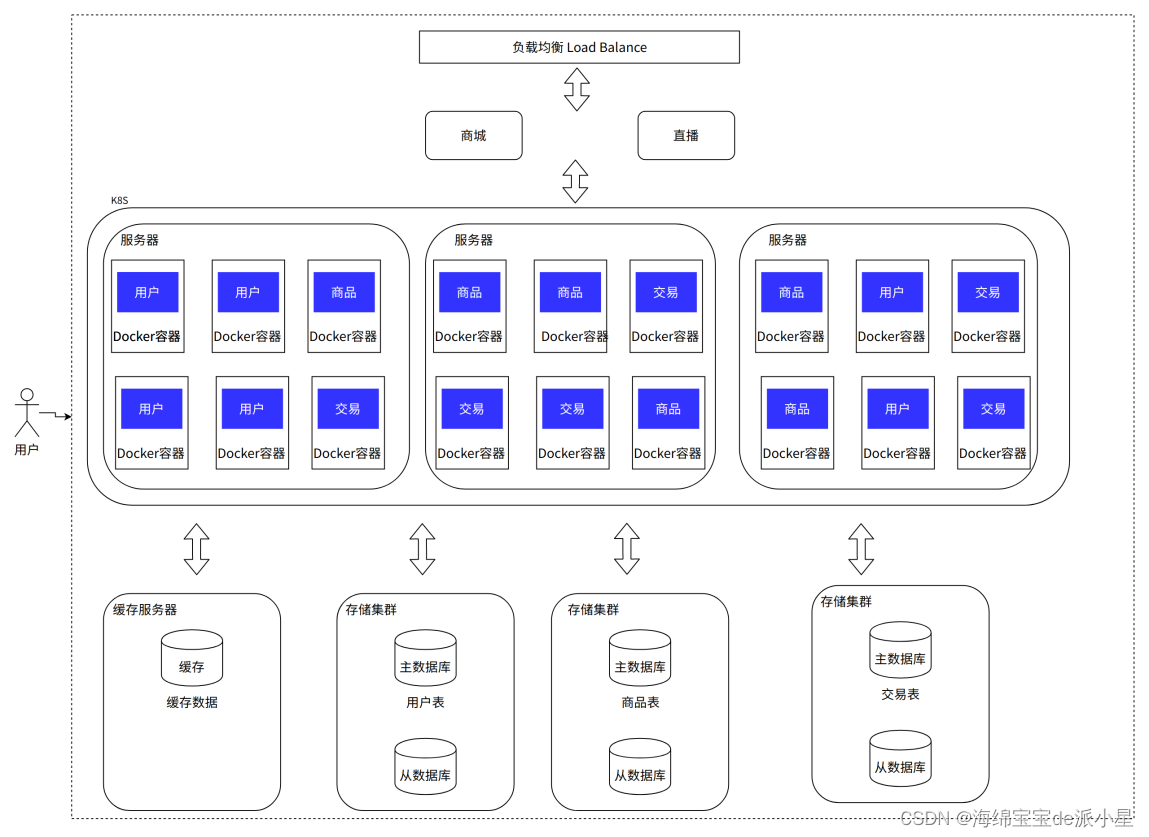
Docker:技术架构演进
文章目录 基本概念架构演进单机架构应用数据分离架构应用服务集群架构读写分离/主从分离架构冷热分离架构垂直分库微服务容器编排架构 本篇开始进行对于Docker的学习,Docker是一个陌生的词汇,那么本篇开始就先从技术架构的角度出发,先对于技术…...
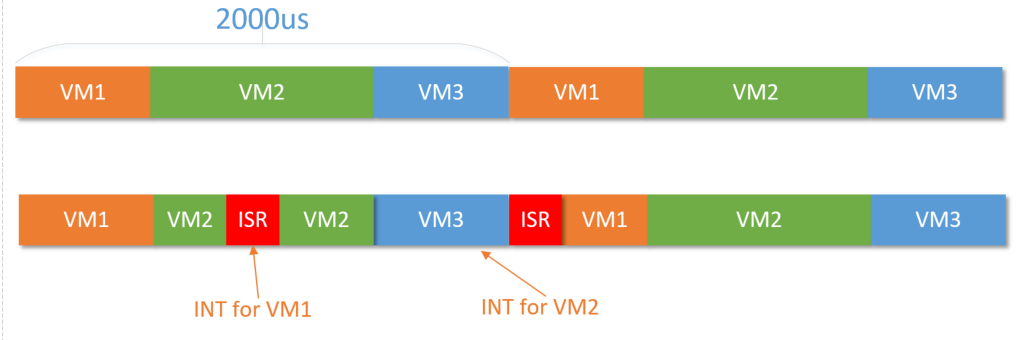
汽车MCU虚拟化--对中断虚拟化的思考(2)
目录 1.引入 2.TC4xx如何实现中断虚拟化 3.小结 1.引入 其实不管内核怎么变,针对中断虚拟化无非就是上面两种,要么透传给VM,要么由Hypervisor统一分发。汽车MCU虚拟化--对中断虚拟化的思考(1)-CSDN博客 那么,作为车规MCU龙头…...
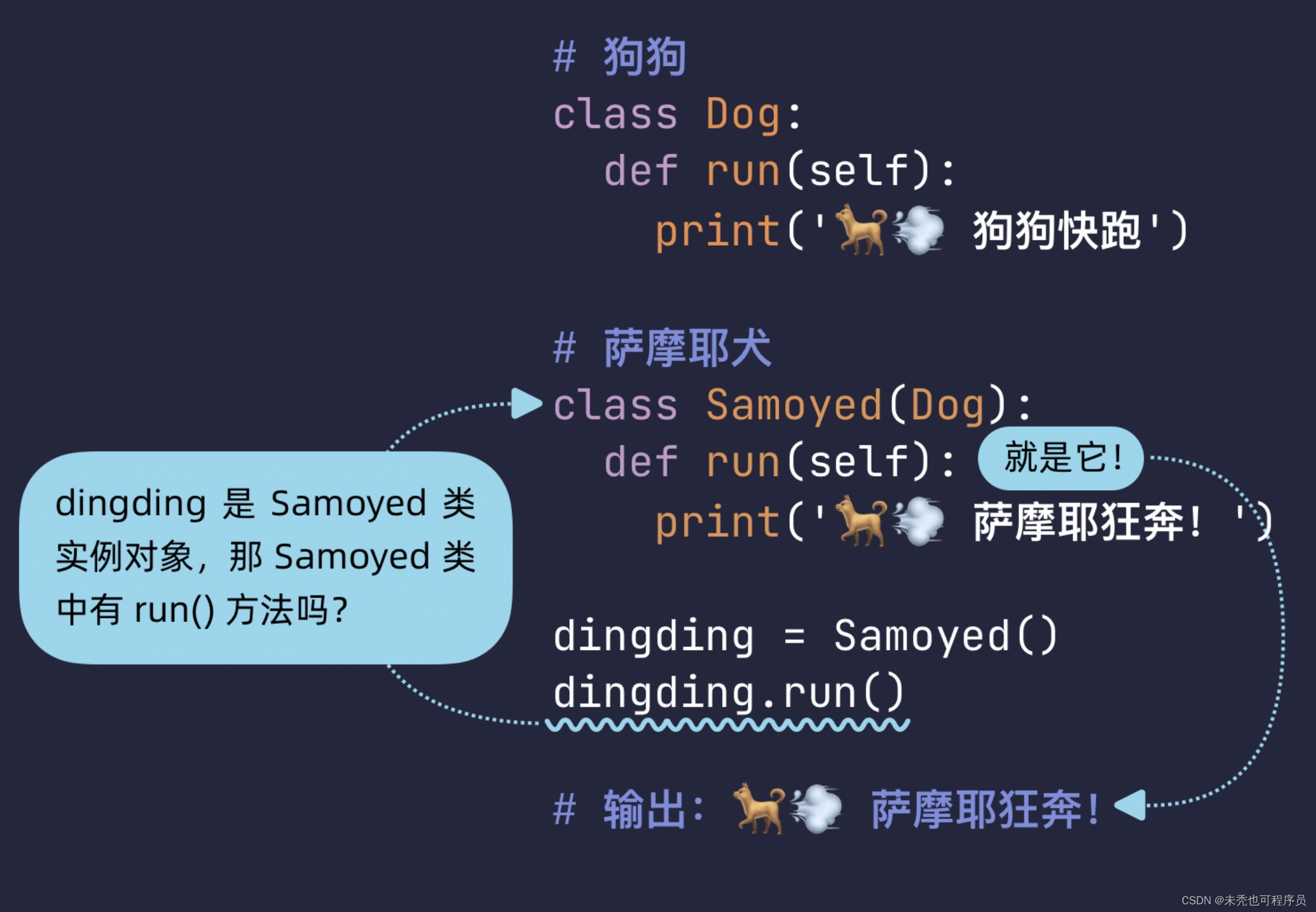
python的继承
本章正式开始之前,先让我们回顾一下什么是 对象 ? 什么是 类 ? 小贝 喜欢 猫咪,今年领养了一只名叫 Kitty 的 布偶猫。则下列哪项是 对象 呢? A. 猫咪 B. Kitty C. 布偶猫 相比之下,闻闻 更喜欢 犬科 动…...

组件的注册和引用
在Vue中,开发者可以将页面中独立的、可重用的部分封装成组件,对组件的结构,样式和行为进行设置。组件是 Vue 的基本结构单元,组件之间可以相互引用。 一.注册组件 当在Vue项目中定义了一个新的组件后,要想在其他组件中…...

诊所如何赢得患者?做好这两点很关键!
大家都知道,社区周边的诊所原本是居民看病的第一选择,方便又快捷。但现在很多诊所服务都差不多,没有自己的特色,这就让患者有点难选择了。那诊所怎么做才能更吸引患者呢?其实,关键是要抓住患者的心…...

Qwen2本地部署的实战教程
大家好,我是herosunly。985院校硕士毕业,现担任算法研究员一职,热衷于机器学习算法研究与应用。曾获得阿里云天池比赛第一名,CCF比赛第二名,科大讯飞比赛第三名。拥有多项发明专利。对机器学习和深度学习拥有自己独到的见解。曾经辅导过若干个非计算机专业的学生进入到算法…...
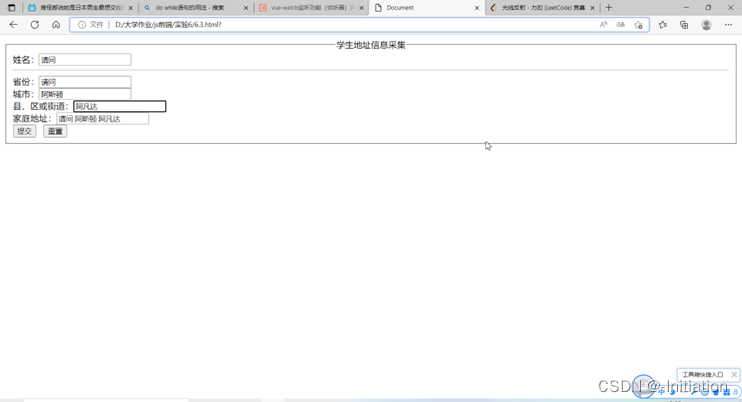
html+CSS+js部分基础运用15
1、完成输入框内容的实时反向输出。 2、银行账户余额变动自动通知项目。 设计要求:单击按钮后,余额按照输入框的数额减少,同时将按钮式的提示信息(金额)同步改变。利用侦听属性实现余额发生变化时发出提示信息&#x…...

从零开始学JAVA
一、编写Hello world程序 public class JavaMain1 {//主程序执行入口,main方法public static void main(String[] args){System.out.println("Hello world!");} } 运行结果 Hello world! java编写主程序常见错误: 1、System ---首字母没有…...
查询)
MySQL(四)查询
1、MySQL限性约束 —非空、唯一(自增)、主外键、检查(MySQL存在但是不能用)。 约束主要完成对数据的校验,保证数据库数据的完整性;如果有相互依赖数据,保证该数据不被删除。 1)常用五类约束 not null :非空约束,指定某列不为空。 unique:唯一约束,指定某列和几列组…...
——day31)
嵌入式学习——网络编程(TCP)——day31
1. TCP和UDP的区别 TCP(Transmission Control Protocol,传输控制协议) UDP(User Datagram Protocol,用户数据报协议) 1.1 连接方式 TCP 是面向连接的协议,它在数据传输前需要通过三次握手建立…...
[STM32]定位器与PWM的LED控制
目录 1. 深入了解STM32定时器原理,掌握脉宽调制pwm生成方法。 (1)STM32定时器原理 原理概述 STM32定时器的常见模式 使用步骤 (2)脉宽调制pwm生成方法。 2. 实验 (1)LED亮灭 代码 测试效果 (2)呼吸灯 代码 测试效果 3.总结 1. 深入了解STM32定时器原…...

8人SolidWorks研发共享一台服务器——性能算力共享智能按需分配
8人SolidWorks研发团队可借助云飞云智能共享云桌面,通过以下方式实现一台服务器的性能算力共享与智能按需分配。一、核心硬件配置CPU:选择多核高主频处理器,如Intel Core i9 14900K(24核32线程)或AMD锐龙9 9950X&#…...

实战应用:使用快马平台为vmware17部署生成企业级健康检查与配置方案
在实际的企业IT环境中,部署VMware vSphere 17(以下简称VMware 17)这类虚拟化平台往往不是简单的安装过程,而是需要综合考虑硬件兼容性、系统配置、安全策略等多方面因素。为了确保部署过程的顺利和后续运行的稳定,我们…...

暗黑破坏神3自动化工具:智能技能管理与效率提升解决方案
暗黑破坏神3自动化工具:智能技能管理与效率提升解决方案 【免费下载链接】D3keyHelper D3KeyHelper是一个有图形界面,可自定义配置的暗黑3鼠标宏工具。 项目地址: https://gitcode.com/gh_mirrors/d3/D3keyHelper 在暗黑破坏神3的冒险旅程中&…...

LightRAG架构解析:从图索引到双层检索的工程实现
1. LightRAG架构概览:为什么需要双层检索? 在传统RAG系统中,我们常常遇到两个核心痛点:信息碎片化和上下文缺失。想象一下,当你问"电动汽车的普及对城市空气质量有何影响"时,传统系统可能分别检索…...

Youtu-VL-4B-Instruct-GGUF模型安全考量:在网络安全领域的潜在应用与风险
Youtu-VL-4B-Instruct-GGUF模型安全考量:在网络安全领域的潜在应用与风险 最近和几个做安全的朋友聊天,他们都在头疼一个问题:现在的网络攻击越来越“花里胡哨”了。以前可能就是一段恶意代码,现在呢?一张精心设计的钓…...

GLM-4.1V-9B-Base与MATLAB联动:科学计算可视化报告的自动生成
GLM-4.1V-9B-Base与MATLAB联动:科学计算可视化报告的自动生成 1. 科研工作流中的痛点与解决方案 科研人员每天都要面对大量实验数据,从原始数据到最终的可视化报告往往需要经历繁琐的步骤。传统的数据分析流程通常包括:数据整理→MATLAB编程…...

在树莓派4B上编译运行Speedtest-CLI:手把手解决curl和expat库的交叉编译难题
树莓派4B实战:从零构建Speedtest-CLI测速工具全流程指南 1. 环境准备与工具链配置 在树莓派4B上构建Speedtest-CLI测速工具,首先需要搭建完整的交叉编译环境。不同于x86平台的直接编译,ARM架构下的开发需要特别注意工具链的选择和配置。 必备…...

ESP32S3-Cam + MPU6050 DMP移植避坑实录:从编译报错到姿态数据稳定输出的完整流程
ESP32S3-Cam与MPU6050 DMP移植实战:从编译报错到稳定姿态解算的全流程解析 当ESP32S3-Cam遇上MPU6050的DMP(数字运动处理器)功能,本应是物联网项目中实现低成本姿态检测的完美组合。但实际移植过程中,开发者往往会遭遇…...

高压柔性输电系统中的6脉冲与12脉冲晶闸管控制HVDC仿真模型说明文档
高压柔性输电系统6脉冲,12脉冲晶闸管控制HVDC的仿真模型,说明文档江湖上流传着这么一句话:"搞HVDC不玩晶闸管,就像吃火锅不放辣"。今天咱们就扒一扒那些藏在MATLAB/Simulink里的6脉冲和12脉冲换流器秘密。先说个冷知识&…...

手把手教你用Ollama命令搭建个人AI助手:从拉取Llama 3到定制化部署
从零构建智能对话引擎:Ollama与Llama 3的深度实践指南 在人工智能技术日益普及的今天,拥有一个个性化的AI助手已成为许多开发者和技术爱好者的追求。不同于云端服务的黑箱操作,本地部署的AI模型能提供更高的隐私保护和定制自由度。本文将带你…...