[STM32]定位器与PWM的LED控制
目录
1. 深入了解STM32定时器原理,掌握脉宽调制pwm生成方法。
(1)STM32定时器原理
原理概述
STM32定时器的常见模式
使用步骤
(2)脉宽调制pwm生成方法。
2. 实验
(1)LED亮灭
代码
测试效果
(2)呼吸灯
代码
测试效果
3.总结
1. 深入了解STM32定时器原理,掌握脉宽调制pwm生成方法。
(1)STM32定时器原理
STM32定时器(Timer)是一种用于生成精确时间延时和执行周期性任务的外设。在STM32微控制器中,定时器通常由一组定时器单元组成,每个定时器单元都有自己的计数器和控制寄存器。这些定时器可以配置成多种模式,例如定时器模式、输入捕获模式、输出比较模式等。
原理概述
-
计数器:定时器内部有一个计数器,它会不断地自增直到达到预设的值,然后重新开始计数。计数器的增长速率由时钟源决定,可以是内部时钟源(如HSI、LSI)或者外部时钟源(如HSE、HCLK)。
-
时钟源:定时器的计数器工作时需要一个时钟源。STM32微控制器提供了多种时钟源供选择,可以通过寄存器配置选择。时钟源的选择影响了定时器的精度和范围。
-
预分频器:定时器还可以配置一个预分频器,用于减小时钟源的频率,从而降低计数器增长的速率。这个预分频器可以通过设置寄存器来配置,允许定时器适应不同的应用需求。
-
模式配置:STM32定时器可以配置成多种模式,包括计数模式、定时器模式、PWM输出模式等。每种模式有不同的应用场景和功能。
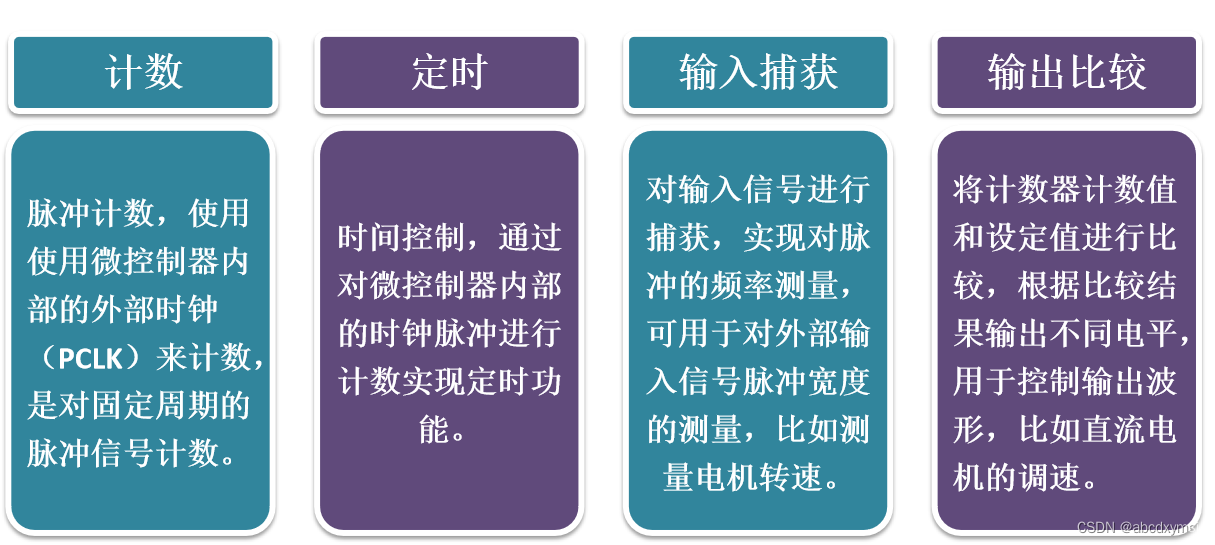
STM32定时器的常见模式
-
计数模式:定时器的计数器简单地递增直到达到最大值,然后重新从零开始计数。这种模式通常用于测量时间间隔或者生成延时。
-
定时器模式:在这种模式下,定时器的计数器到达预设值后会产生一个中断或者触发一个输出。这种模式常用于产生精确的定时事件。
-
输入捕获模式:定时器可以捕获外部信号的边沿,并记录捕获时的计数器值。这种模式常用于测量外部信号的脉冲宽度或者频率。
-
输出比较模式:定时器可以将计数器的值与预设的比较值进行比较,并在匹配时触发中断或者改变输出状态。这种模式常用于生成PWM信号或者控制外部设备。
使用步骤
-
时钟使能:首先需要启用定时器所需要的时钟源,通常需要配置相应的时钟控制寄存器。
-
寄存器配置:根据需要选择定时器、配置预分频器、选择工作模式以及设置相关参数。
-
中断配置:如果需要定时器中断,需要配置中断使能和相应的中断优先级。
-
启动定时器:配置完成后,启动定时器开始计数。
-
处理中断(可选):如果使用了定时器中断,需要编写中断处理函数来处理定时器触发的中断事件。
-
定时器应用:根据具体应用需求,在定时器中断或者定时器到期时执行相应的操作。
定时器的主要功能:
(2)脉宽调制pwm生成方法。
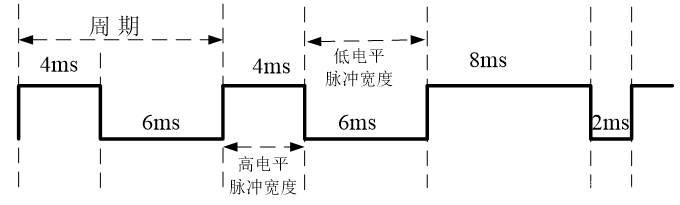
PWM(Pulse Width Modulation,脉冲宽度调制)是一种利用脉冲宽度即占空比实现对模拟信号进行控制的技术,即是对模拟信号电平进行数字表示的方法。
广泛应用于电力电子技术中,比如PWM控制技术在逆变电路中的应用; PWM还应用于直流电机调速,如变频空调的交直流变频调速,除实现调速外,还具有节能等特性。
周期为10ms(频率为100Hz) 的PWM波形:
STM32的定时器除了TIM6和TIM7,其他定时器都可以用来产生PWM输出; 高级定时器TIM1和TIM8可以同时产生多达7路的PWM输出; 通用定时器能同时产生多达4路的PWM输出; STM32中每个定时器有4个输入通道:TIMx_CH1~TIMx_CH4; 每个通道对应1个捕获/比较寄存器TIMx_CRRx,将寄存器值和计数器值相比较,通过比较结果输出高低电平,从而得到PWM信号; 脉冲宽度调制模式可以产生一个由TIMx_ARR寄存器确定频率、由TIMx_CCRx寄存器确定占空比的信号。
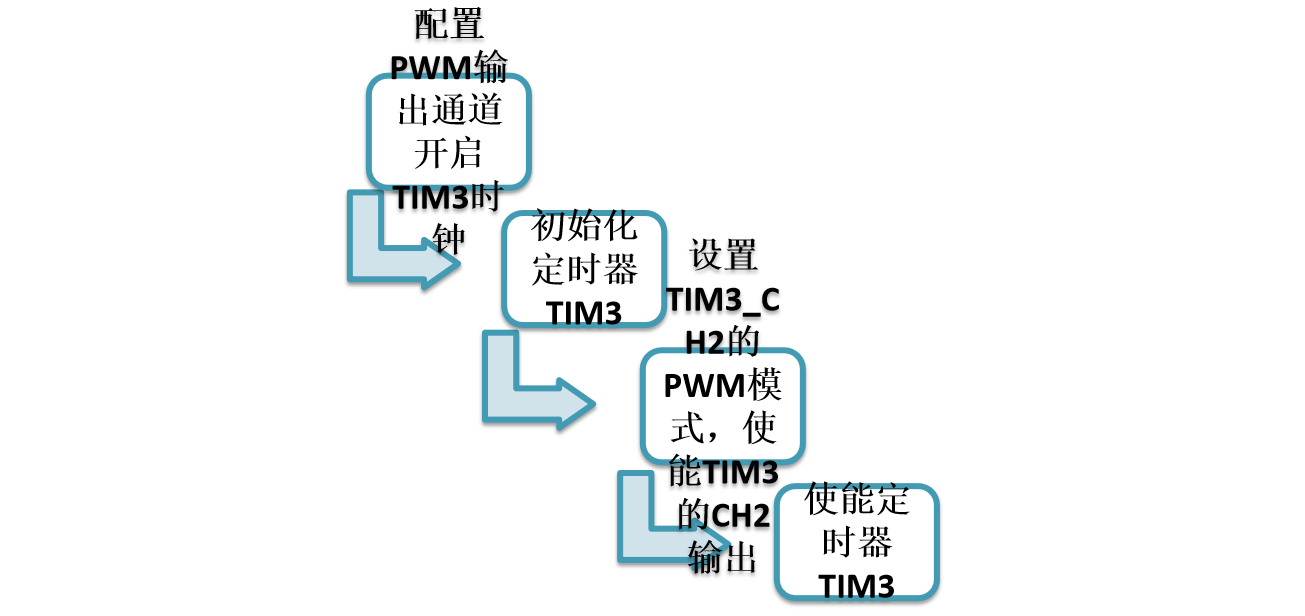
PWM标准外设库输出配置步骤:
2. 实验
(1)LED亮灭
使用STM32F103的 Tim2~Tim5其一定时器的某一个通道pin(与GPIOx管脚复用,见下图),连接一个LED,用定时器计数方式,控制LED以2s的频率周期性地亮灭。
代码
main.c文件
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "PWM.h"uint8_t i;int main(void)
{OLED_Init();PWM_Init();while (1){PWM_SetCompare1(0);Delay_ms(2000);PWM_SetCompare1(100);Delay_ms(2000);}
}
PWM.h文件
#ifndef __PWM_H
#define __PWM_Hvoid PWM_Init(void);
void PWM_SetCompare1(uint16_t Compare);#endifPWM.c文件
#include "stm32f10x.h" // Device headervoid PWM_Init(void)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//开启时钟// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
// GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE);
// GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_InternalClockConfig(TIM2);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARRTIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSCTIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);//给结构体赋初始值TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//设置输出比较的模式TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//设置输出比较极性TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//设置输出状态TIM_OCInitStructure.TIM_Pulse = 0; //设置CCRTIM_OC1Init(TIM2, &TIM_OCInitStructure);//放入Init函数中TIM_Cmd(TIM2, ENABLE);
}void PWM_SetCompare1(uint16_t Compare)
{TIM_SetCompare1(TIM2, Compare);
}
测试效果
(2)呼吸灯
采用定时器PWM模式,让 LED 以呼吸灯方式渐亮渐灭,周期为1~2秒,自己调整占空比变化到一个满意效果;使用Keil虚拟示波器,观察 PWM输出波形。
代码
main.c文件
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "PWM.h"uint8_t i; //定义for循环的变量int main(void)
{/*模块初始化*/OLED_Init(); //OLED初始化PWM_Init(); //PWM初始化while (1){for (i = 0; i <= 100; i++){PWM_SetCompare1(i); //依次将定时器的CCR寄存器设置为0~100,PWM占空比逐渐增大,LED逐渐变亮Delay_ms(10); //延时10ms}for (i = 0; i <= 100; i++){PWM_SetCompare1(100 - i); //依次将定时器的CCR寄存器设置为100~0,PWM占空比逐渐减小,LED逐渐变暗Delay_ms(10); //延时10ms}}
}PWM.h
#ifndef __PWM_H
#define __PWM_Hvoid PWM_Init(void);
void PWM_SetCompare1(uint16_t Compare);#endif
PWM.c
#include "stm32f10x.h" // Device headervoid PWM_Init(void)
{/*开启时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO重映射*/
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //开启AFIO的时钟,重映射必须先开启AFIO的时钟
// GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE); //将TIM2的引脚部分重映射,具体的映射方案需查看参考手册
// GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE); //将JTAG引脚失能,作为普通GPIO引脚使用/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0引脚初始化为复用推挽输出 //受外设控制的引脚,均需要配置为复用模式 /*配置时钟源*/TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟/*时基单元初始化*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //计数周期,即ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //预分频器,即PSC的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元/*输出比较初始化*/TIM_OCInitTypeDef TIM_OCInitStructure; //定义结构体变量TIM_OCStructInit(&TIM_OCInitStructure); //结构体初始化,若结构体没有完整赋值//则最好执行此函数,给结构体所有成员都赋一个默认值//避免结构体初值不确定的问题TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出比较模式,选择PWM模式1TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性,选择为高,若选择极性为低,则输出高低电平取反TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能TIM_OCInitStructure.TIM_Pulse = 0; //初始的CCR值TIM_OC1Init(TIM2, &TIM_OCInitStructure); //将结构体变量交给TIM_OC1Init,配置TIM2的输出比较通道1/*TIM使能*/TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
}void PWM_SetCompare1(uint16_t Compare)
{TIM_SetCompare1(TIM2, Compare); //设置CCR1的值
}
测试效果
3.总结
深入了解STM32定时器原理,掌握脉宽调制pwm生成方法,使用hal库制作定时器完成了led灯的亮灭与呼吸灯实验.
相关文章:
[STM32]定位器与PWM的LED控制
目录 1. 深入了解STM32定时器原理,掌握脉宽调制pwm生成方法。 (1)STM32定时器原理 原理概述 STM32定时器的常见模式 使用步骤 (2)脉宽调制pwm生成方法。 2. 实验 (1)LED亮灭 代码 测试效果 (2)呼吸灯 代码 测试效果 3.总结 1. 深入了解STM32定时器原…...

可视化数据科学平台在信贷领域应用系列五:零代码可视化建模
信贷风控模型是金融机构风险管理的核心工具,在信贷风险管理工作中扮演着至关重要的角色。随着信贷市场的环境不断变化,信贷业务的风险日趋复杂化和隐蔽化,开发和应用准确高效的信贷风控模型显得尤为重要。信贷风险控制面临着越来越大的挑战和…...

Windows 11广告植入“另辟蹊径”:PC Manager暗示若不使用必应搜索,你的系统可能需要“修复”
Edge浏览器近期增添了许多实用的新功能,如侧边栏、休眠标签页和沉浸式阅读器。话虽如此,浏览器中仍有一部分功能被部分用户视为“冗余软件”和不必要的累赘。 随着Windows 11用户逐渐习惯操作系统关键位置出现越来越多的广告,微软似乎正尝试以…...

一线教师教学工具汇总
亲爱的教师们!我们的教学工具箱里也该更新换代啦!今天,就让我来给大家安利一波超实用的教学神器: 百度文库小程序 —— 在线图书馆 百度文库,一个宝藏级的在线文档分享平台!在这里,你可以找到海…...
【数据结构】栈和队列-->理解和实现(赋源码)
Toc 欢迎光临我的Blog,喜欢就点歌关注吧♥ 前面介绍了顺序表、单链表、双向循环链表,基本上已经结束了链表的讲解,今天谈一下栈、队列。可以简单的说是前面学习的一特殊化实现,但是总体是相似的。 前言 栈是一种特殊的线性表&…...

一篇教会你CSS定位
前言:在网页布局的时候,我们需要将想要的元素放到指定的位置上,这个时候我们就可以使用CSS中的定位操作。 先让我们看一下本篇文章的大致内容: 目录 什么是定位 1.相对定位 2.绝对定位 3. 固定定位 4. 粘性定位 5. 定位层级…...
Hive的常规操作
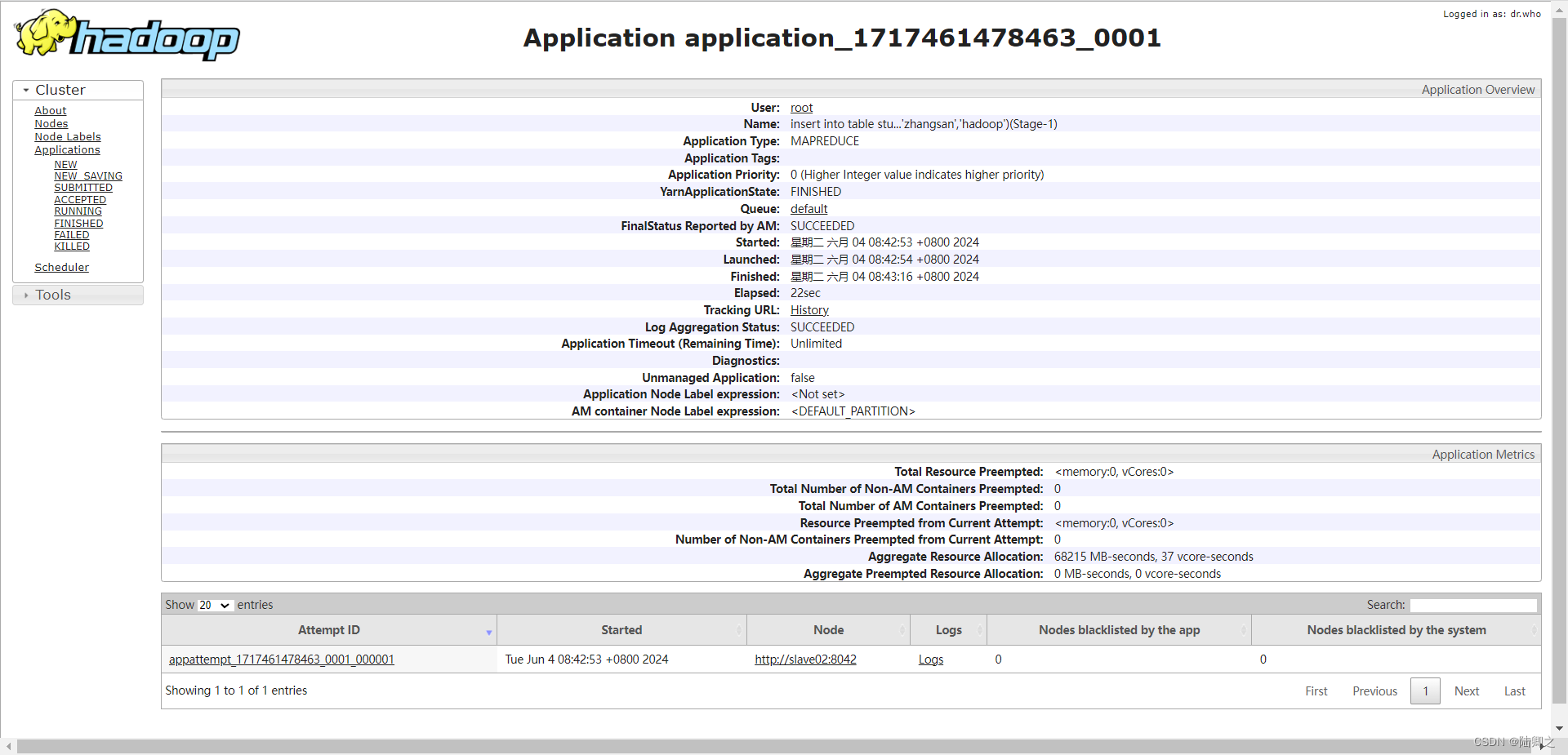
Hive常规操作 hive常用交互命令 -e执行sql语句 [rootmaster ~]# hive -e "show databases";-f执行sql脚本 [rootmaster ~]# hive -f /usr/local/demo.sql查看hive中输入的所有命令 [rootmaster ~]# cat ~/.hivehistory操作库 创建库 语法: create…...

redis做为缓存,mysql的数据如何与redis进行同步呢?
让我们一步步来实现如何让MySQL数据库的数据和Redis缓存保持同步。想象一下,MySQL是一个大仓库,存放着所有重要的货物(数据),而Redis则像是一个快速取货窗口,让你能更快拿到常用的东西。为了让两者保持一致…...

【Map】集合总结
一、Map 之前学习的Collection集合体系是单列集合,即一次存取一个元素 Map是双列集合,一次存取一对元素,这一对儿称为键值对,key-value,且key是映射到value 所谓键映射到值,是指只能通过键找到值,无法通过值找键 Map中键不能重复!值允许重复 Map中一个键,只能对应一个值 Ma…...

SpringBoot实现发送邮件功能
目录 一、开启邮件服务 二、导入pom依赖 三、配置yml文件 四、发送邮件 4.1、发送文字邮件 4.2、发送html邮件 4.3、发送附件邮件 4.4、发送图片邮件 一、开启邮件服务 这里拿QQ邮箱举例。 翻到下面进行开启,之后获取授权码。 二、导入pom依赖 <dependency><…...

外观数列 ---- 模拟
题目链接 题目: 分析: 题目的意思如下:所以我们需要引用双指针来找到连续的字符有几个, 并添加到答案中, 接着将此字符添加到答案中, 让left right , 继续向后遍历整个字符串, 重复上面的操作将答案重新赋给字符串, 继续重复上述操作, 应该重复n - 1 次, 因为n为1的时候, 直…...

上心师傅的思路分享(二)
Druid monitor 与Springboot常见报错界面渗透小技巧 目录 前言 1.Druid monitor介绍 2.Druid未授权(1rank) 3.druid弱口令 4.Druid进一步利用 4.1 URL监控 4.2 Session监控 利用思路 EditThisCookie(小饼干插件) 5.SpringBoot Actuator未授权访问漏洞 5.1 简介 5…...

116页 | 2024年中国金融行业网络安全研究报告(免费下载)
以上是资料简介和目录,如需下载,请前往星球获取!!!...

基于fabric封装一个简单的图片编辑器(vue 篇)
介绍 前言vue demo版本react 版本 前言 对 fabric.js 进行二次封装,实现图片编辑器的核心功能。核心代码 不依赖 ui响应式框架vue ,react 都适用。 只写了核心编辑相关代码便于大家后续白嫖二次开发 核心代码我就没有打包发布 会 和 业务代码一起放到项目中。 vu…...

Linux中 .PHONY 和 all 在 Makefile 中的作用
1 .PHONY 和 all .PHONY 是 GNU make 工具中的一个特殊指令,用于指示某个目标是一个伪目标。伪目标并不对应于实际的文件,而是用来执行一系列命令的标识符。使用 .PHONY 的好处包括避免与现有文件同名造成的冲突,以及提高 make 的执行效率&am…...

Flutter 中的 FlexibleSpaceBar 小部件:全面指南
Flutter 中的 FlexibleSpaceBar 小部件:全面指南 Flutter 是一个由 Google 开发的跨平台 UI 框架,它提供了丰富的组件来帮助开发者构建高性能、美观的移动、Web 和桌面应用。在 Flutter 的组件库中,FlexibleSpaceBar 是一个与 SliverAppBar …...
-分析报表)
每天一个数据分析题(三百五十四)-分析报表
分析报表的主要作用是通过可视化图表的形式将各种分析结果完整、准确地呈现给阅读者,帮助阅读者读懂数据,从而进一步发现数据背后隐藏的业务问题。下列说法正确的是? A. 静态报表的主要载体是电子表格工具 B. BI报表的数据源获取方式是应用…...
卫星通信频段有哪些
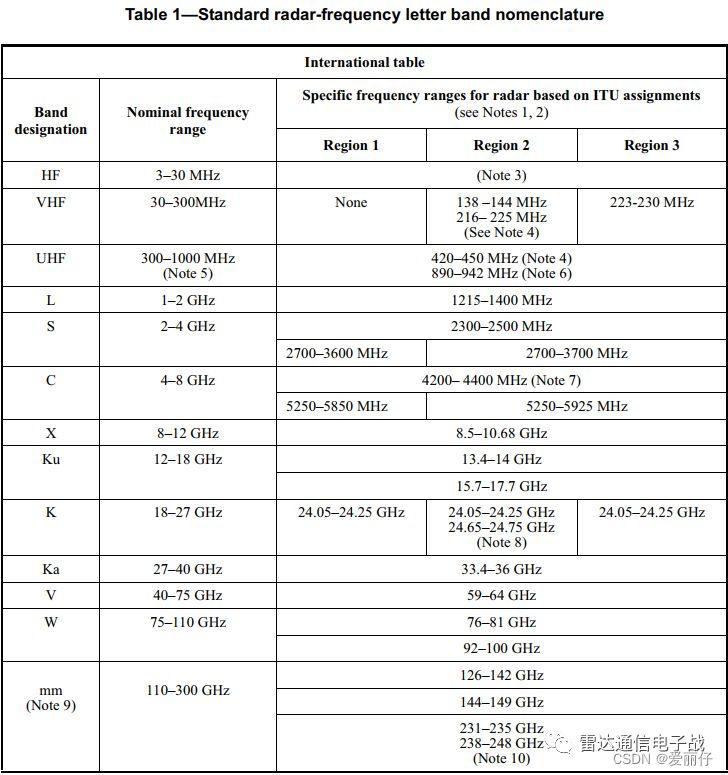
卫星通信使用到的频段涵盖L, S, C, Ku, Ka等,而最常用的频段是C(4~8GHz)和Ku(12~18GHz)频段,而Ka(27-40GHz)频段是后起之秀。目前地球赤道上空有限的地球同步卫星轨位几乎已被各国占满,C和Ku频段内的频率资源被大量使用,而Ka频段的…...

RobotMaster编程语言:深度探索与实践挑战
RobotMaster编程语言:深度探索与实践挑战 RobotMaster编程语言,作为机器人编程领域的一颗璀璨明珠,其独特性与复杂性吸引了无数探索者的目光。本文将从四个方面、五个方面、六个方面和七个方面深入剖析这一编程语言的奥秘,同时揭…...

Ascend训练软件栈了解
一.分布式大模型训练的完整流程及注意事项 1. 迁移分析 模型选取与约束说明 : 确保模型能在GPU或CPU上运行并获取性能基线,了解不支持场景,如DP模式、APEX库、bmtrain框架等。支持度分析 : 使用msFmkTransplt工具分析模型算子、…...

ImageSearch:5分钟掌握本地千万级图片搜索的终极指南
ImageSearch:5分钟掌握本地千万级图片搜索的终极指南 【免费下载链接】ImageSearch 基于.NET8的本地硬盘千万级图库以图搜图案例Demo和图片exif信息移除小工具分享 项目地址: https://gitcode.com/gh_mirrors/im/ImageSearch 你是否曾在电脑里堆积如山的照片…...
)
别只盯着ChatGPT了!SpringAI工具调用帮你低成本打造专属‘AI员工’(避坑指南)
别只盯着ChatGPT了!SpringAI工具调用帮你低成本打造专属‘AI员工’(避坑指南) 想象一下,你的电商团队每天要处理上百条"库存还有吗?"、"订单能改地址吗?"这样的重复咨询。客服人力成本…...

电视盒子播放卡顿?教你一招解决所有格式难题
电视盒子播放卡顿?教你一招解决所有格式难题 【免费下载链接】TVBoxOSC TVBoxOSC - 一个基于第三方项目的代码库,用于电视盒子的控制和管理。 项目地址: https://gitcode.com/GitHub_Trending/tv/TVBoxOSC 一、破解家庭娱乐的格式困局 你是否也曾…...
:迭代器与生成器)
Python从入门到精通(第14章):迭代器与生成器
开头导语 这是本系列第14章。前面你已经用过很多次迭代器和生成器——for x in data 的背后是什么,map 返回的对象为什么不能下标访问,range 为什么不会占很多内存——这些问题的答案都在本章。通过亲手实现一个迭代器类,你会对 Python 迭代协议有清晰的认识,遇到相关错误…...
Pixel Aurora Engine镜像部署:多用户并发生成的Streamlit服务配置
Pixel Aurora Engine镜像部署:多用户并发生成的Streamlit服务配置 1. 像素极光引擎简介 Pixel Aurora(像素极光)是一款基于AI扩散模型的高端绘图工作站,采用独特的复古像素游戏风格界面设计。这款工具能够将文字描述转化为极具视…...

深入解析AUTOSAR通信模块:从信号抽象到多路CAN配置
1. AUTOSAR通信模块的核心价值 第一次接触AUTOSAR通信模块时,我被它复杂的层级关系绕得头晕。直到在实车上调试快充CAN信号时,才真正理解这种架构设计的精妙之处。简单来说,AUTOSAR的Com模块就像个智能邮局,负责把应用层产生的各种…...

foobar2000界面美化终极指南:3步打造你的专属音乐播放器
foobar2000界面美化终极指南:3步打造你的专属音乐播放器 【免费下载链接】foobox-cn DUI 配置 for foobar2000 项目地址: https://gitcode.com/GitHub_Trending/fo/foobox-cn 还在为foobar2000那套单调乏味的默认界面感到困扰吗?今天我要为你介绍…...
)
别再手动改稿了!用LaTeX的soul包搞定论文批注(删除线/高亮/引用兼容)
LaTeX高效批注指南:用soul包实现学术协作的优雅排版 当导师的红色批注铺满论文初稿,或是合作者发来二十处修改意见时,大多数研究者都会面临一个共同困境——如何在保留原始内容的同时清晰标记修改痕迹?传统的手动添加删除线或高亮…...

Qwen3-TTS-Tokenizer-12Hz快速上手:Web界面一键处理音频文件
Qwen3-TTS-Tokenizer-12Hz快速上手:Web界面一键处理音频文件 1. 为什么选择Qwen3-TTS-Tokenizer-12Hz? 想象一下,你正在开发一个语音社交应用,用户上传的音频文件体积大、传输慢,服务器存储成本居高不下。传统压缩算…...
20260331-001篇)
网络基础知识整理(精简通用版)20260331-001篇
文章目录 网络基础知识整理(精简通用版) 一、网络基本概念 二、网络拓扑结构 三、OSI 七层模型(核心参考) 四、TCP/IP 模型(实际互联网标准) 五、IP 地址基础 六、传输层协议(TCP vs UDP) TCP(传输控制协议) UDP(用户数据报协议) 七、常见网络协议与端口 八、网络设…...