UR机器人通信汇总
文章目录
- 一、概述
- 二、UR机器人通信
- 2.1UR通信协议
- 2.2 UR通信端口
- 三、UR机器人通信端口类型
- 3.1 Modbus TCP端口(502端口)
- 3.2 Dashboard端口(29999端口)
- 3.3 上位机编程端口(30001/30002/30003端口)
- 3.3.1 URScript简介
- 3.3.2 机器人的控制
- 3.3.3 机器人状态读取
- 四、一个概念——TCP
- 五、UR机器人返回信息格式解析
- 5.1 概述
- 5.2UR返回信息协议解析
- 5.2.1返回数据包频率和长度
- 5.2.2返回数据包格式
- 5.3 解析实例
- 5.4 相关代码
- 六、基于TCP/IP协议实现上位机对UR机器人的远程控制
- 6.1引言
- 6.2 UR机器人提供的基于TCP/IP协议的接口
- 6.3 ModbusTCP端口
- 6.4Dashboard端口
- 6.5上位机编程端口
- 6.6实时反馈端口
- 6.7结束语
一、概述
UR机器人作为目前使用广泛的协作机器人,其开放了基于TCP/IP的远程控制功能,提供了多个多类型的端口,用于工业总线控制,或者用户自行编程控制,以下记录整理此方面的信息。
参考链接:
http://t.csdn.cn/ikiMG
二、UR机器人通信
2.1UR通信协议
UR机器人可通过TCP/IP通信,向机器人发送控制命令,以及从机器人获取状态信息。
2.2 UR通信端口
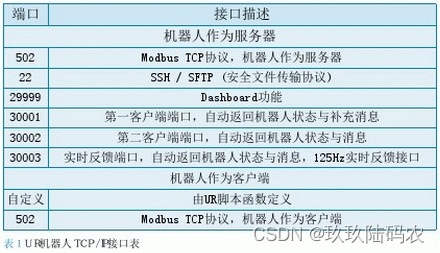
UR机器人通信时提供了以下接口,我们可以根据自己需要,使用其中的一种或多种。
表1 机器人作为服务器的通信端口

表2 机器人作为客户端的通信端口

三、UR机器人通信端口类型
3.1 Modbus TCP端口(502端口)
Modbus是OS模型第7层上的应用层报文传输协议,它在连接至不同类型总线或网络的设备之间提供客户端/服务器通信,互联网组织保留系统端口502访问Modbus,Modbus是一个请求/应答协议,并且提供功能码规定的服务。
UR机器人既可以作为Modbus TCP服务器,也可以作为Modbus TCP客户端,两者的主要区别在于消息请求方的不同。
通过UR机器人的相关Modbus地址,我们可以访问机器人的很多信息,进而可以在上位机上解析这些信息并显示。
下表为Modbus地址

示例:本人利用502端口实现了TCP/IP协议的UR控制和状态读取,,其中简单介绍了Modbus命令的构造,并使用260、270、400三个地址读取UR状态和位置信息。
3.2 Dashboard端口(29999端口)
上位机可以通过29999端口直接发送一些简单的指令给机器人,这些指令是UR自己定义的,这种功能被称为Dashboard。我们可以通过一些Dashboard指令,远程切换、加载程序,同时可以启动、暂停、停止程序,实现上位机对UR的远程控制。
3.3 上位机编程端口(30001/30002/30003端口)
UR机器人提供了这三个端口,用于远程控制编程。其功能如下表所示

Primary & Secondary ( 30001 & 30002 )接口
Primary & Secondary 接口由机器人控制进程维护和执行的端口。开机后,机器人
一直从这两个端口以 10Hz 频率对外发送机器人的状态信息(机器人位置, IO ,运行状
态等),除此之外 Primary 端口还会发送一些全局变量更新等信息。因此如果需要编写
上位机在线编程以及运行监视,例如编写一个类似示教器界面的上位机程序时可以使
用 Primary 端口(当然对于加载程序,运行程序等操作需要使用 Dashboard ( 29999 )
接口)。
Primary & Secondary 接口在接收到上位机发送的脚本指令 字符
串后会 立即中断当前执行程序(如果机器人正在运行),然后运行接收到的脚本指令 。
值得提醒的是,一些具有返回值的脚本指令,其返回值并不会通过这两个端口返回,因
为脚本的执行是在机器人控制进程中,其返回值只传递给该进程中的变量。
如果想一次性发送一段程序给机器人,需要将发送的程序按照如下格式发送:
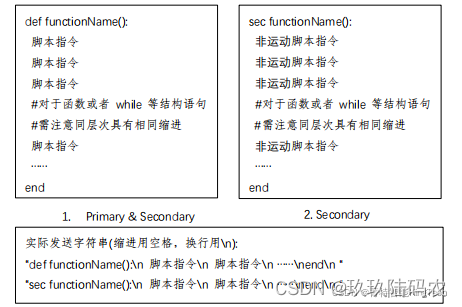
如果向 Secondary 接口发送 def 类型的一段脚本给机器人,机器人当前执行的程
序会被中断, 如果需要当前执行的程序不被中断(例如设置 IO ),可以向 Secondary 程
序发送 sec 类型的一段脚本,当然这段脚本中不能够包含运动指令, 因为同一时间机器
人只能从一处获取运动指令,否则无法预期运行后果。
def functionName():
脚本指令
脚本指令
脚本指令
对于函数或者 while 等结构语句
需注意同层次具有相同缩进
脚本指令
……
end
1.
Primary & Secondary
2. Secondary
实际发送字符串 ( 缩进用空格,换行用 \n):
“def functionName():\n 脚本指令 \n 脚本指令 \n ……\nend\n “
“sec functionName():\n 脚本指令 \n 脚本指令 \n ……\nend\n “
sec functionName():
非运动 脚本指令
非运动 脚本指令
非运动 脚本指令
对于函数或者 while 等结构语句
需注意同层次具有相同缩进
非运动 脚本指令
……
end
参考链接:https://blog.csdn.net/weixin_52531852/article/details/124227397
3.3.1 URScript简介
UR机器人有3种编程方式:Polyscope编程、脚本编程以及C-API编程:
- Polyscope编程:指的是程序在示教器上被编辑,机器人然后执行,这是UI层的编程方式;
- C-API编程:是在研发层上的编程方式;
- 脚本编程:URScript,是UR公司在Python语言基础上,自己研发的语言,是在脚本层上控制机器人的编程语言,我们使用的主要是这种脚本编程。
3.3.2 机器人的控制
上位机作为客户端,通过30001/30002/30003其中一个特定的编程端口,与机器人控制器建立TCP/IP连接,就可以在上位机上按照URScript语言格式编写脚本程序,直接发送给机器人控制器,机器人就可以执行相应动作了。
示例:本人利用30003端口实现了TCP/IP协议的UR控制,其中介绍了三个常用URScript指令,即MOVEL、MOVEP、STOPL,并利用其实现了UR的运动控制。
3.3.3 机器人状态读取
30001~30003这三个端口共同特点是,一旦客户端打开端口,就会按照一定的频率收到来自机器人的信息,30003端口是实时反馈端口,客户端每8ms(125Hz)就收到一次来自机器人的信息。而其它两个端口只能每200ms(5Hz)收到一次来自机器人的信息。
客户端通过这三个端口收到的机器人信息稍有不同,通过30003端口收到的信息是最丰富的,包含了通过30001和30002收到的大部分信息。
因此,通过实时反馈端口30003,客户端收到机器人的信息频率是最高的,内容也是最全的。
按照参考文献说法:通过30003每次收到的数据包是1044个字节,以标准格式排列,极少数情况下客户端会收到小于1044个字节。
经个人实际测试,30003端口每次会收到1108字节,与上述描述稍有不同,本人试图解析了这些信息,限于篇幅,下一篇文章“UR机器人返回信息格式解析“详细介绍30003端口返回信息的解析。
https://blog.csdn.net/hangl_ciom/article/details/97612246
四、一个概念——TCP
另外需要说明一点的是,在UR控制里出现了两个TCP概念,要注意区分(刚接触UR时,看示教器和说明书,很迷糊了一阵子,所以这里说明一下,有同样疑惑的可以参考)
- 网络协议的TCP:网络协议中TCP/IP的含义是Transmission Control Protocol / InternetProtocol;
- UR的TCP:含义是Tool Center Point,指的是机器人工具的中心点,TCP位置指的是机器人工具中心点位置,同理TCP坐标系,指的是固连在机器人工具终端的坐标系。
五、UR机器人返回信息格式解析
5.1 概述
UR机器人提供了多种端口,用于控制和读取机器人信息,本人整理了相关信息,见文章《UR机器人通信端口和协议》。
本人使用了30003端口来向机器人发送URScript脚本控制命令,并通过该端口接收实时返回数据。
5.2UR返回信息协议解析
5.2.1返回数据包频率和长度
由于30003端口返回的信息是最全的,包含了30001、30002端口的返回信息,因此,这里以30003端口信息解析。
30003端口返回数据频率一般是125Hz,即每8ms即返回一个数据包,最高频率能达到500Hz。
个人实测,返回数据包的字节长度一般是1108字节,按照文献1数据包是1044字节,文献2数据包是1108字节,分析可能UR后来扩充了UR返回数据信息。
实际上,这个字节规定是多少并不影响使用,因为在返回的数据包的前四个字节,即给出了数据包中包含信息的字节数。
5.2.2返回数据包格式
下表为30003实时反馈端口机器人信息1044字节数据格式,来自参考文献1。

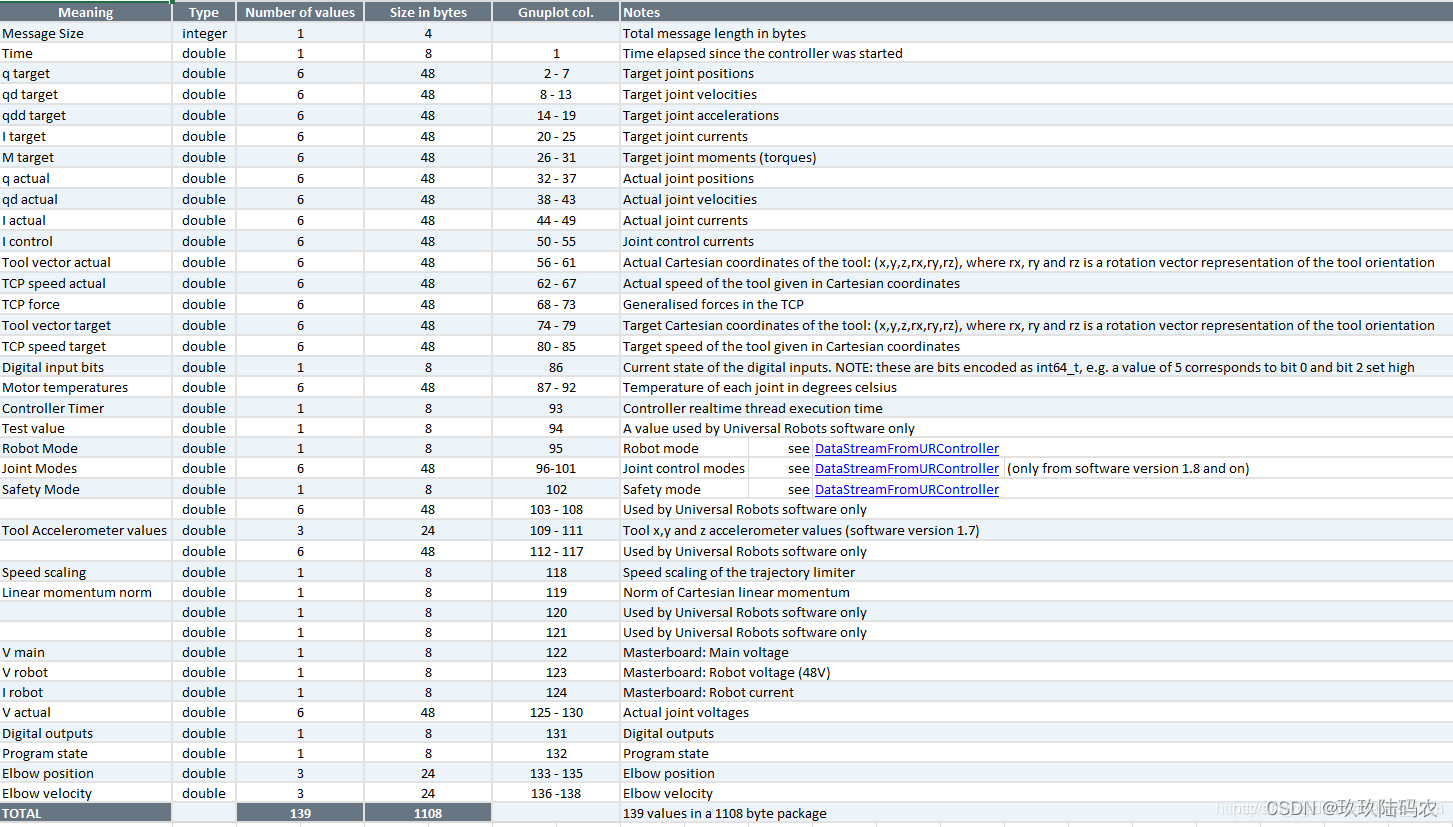
下图为1108字节返回数据具体的各字节包含数据格式,来自参考文献2。
5.3 解析实例
编写了TCP/IP程序控制UR机器人,并解析其在30003端口返回的数据包,实测结果:
每个数据包收到1108字节数据。
数据解析时要注意,收到数据包的每个数据的字节顺序是Big-Endian,即高位在前,而计算机中的字节顺序是Little-Endian,即低位在前,要注意进行字节顺序转换。
下图为接收到的数据包的一部分
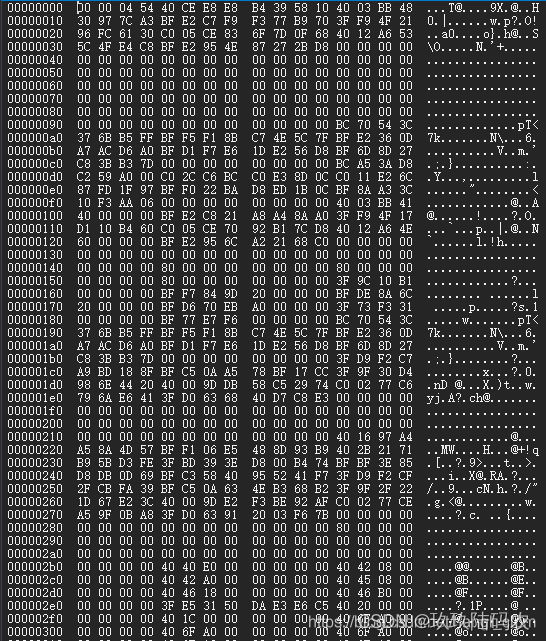
以几个主要的数据解析为例:
- 第1-4字节(上图中偏移地址:0x0):00 00 04 54,整数型数据,即0x454,1108,这就是接收数据的字节长度。
- 第13字节(上图中偏移地址:0x0c)开始,连续6个Double型数据,即关节目标位置qtarget,数据为:2.466446,-0.586911,1.581819,-2.725837,4.662427,-0.580726;
- 第445字节(上图中偏移地址:0x1bc)开始,连续6个Double型数据,即当前TCP位置矢量Tool VectorActual,数据为:0.405443,-0.164387,0.030460,2.077079,-2.308484,0.256067。收到数据与UR示教器上显示数据比对一致。
5.4 相关代码
链接:
https://blog.csdn.net/hangl_ciom/article/details/104439042
六、基于TCP/IP协议实现上位机对UR机器人的远程控制
6.1引言
2010年,德国学术界和产业界提出“工业4.0”的概念,即是以智能制造为主导的第四次工业革命,或革命性的生产方法。该战略旨在通过充分利用信息通讯技术和网络空间虚拟系统—信息物理系统相结合的手段,将制造业向智能化转型。所以,近些年许多工业自动化厂商将自己的产品研发所考虑的一个重要方向定在是否能被远程控制。另一方面,随着国内人工成本的不断上升以及工厂人员流动的不确定性,机器人产业是近几年,相信也是未来几年的朝阳产业。所以对于工业机器人在工厂生产中的远程控制,是一个机器人集成方面比较不错的课题。我们知道,在工业机器人的队伍中,UR机器人是第一家在工业环境下工作的人机协作机器人,它以轻便、简单、安全著称。下面我们就来了解一下如何实现上位机对UR机器人的远程控制。
6.2 UR机器人提供的基于TCP/IP协议的接口
TCP/IP协议源于1969年,是针对Internet开发的一种体系结构和协议标准,目的在于解决异种计算机网络的通信问题。使得网络在互联时能为用户提供一种通用、一致的通信服务。是Internet采用的协议标准。基于TCP/IP的通讯具有成本低、可靠性高、实用性强、性能高等特点,所以现在许多工业自动化产品都具有基于TCP/IP协议通讯的接口,从而实现设备与设备之间,设备与网络之间的通讯。UR机器人在TCP/IP协议的基础上,提供了丰富的接口用于与外部设备的交互,如表1所述。
有了这些接口,上位机就可以远程控制机器人。如图1,简单描述了上位机对UR机器人远程监控的系统图。
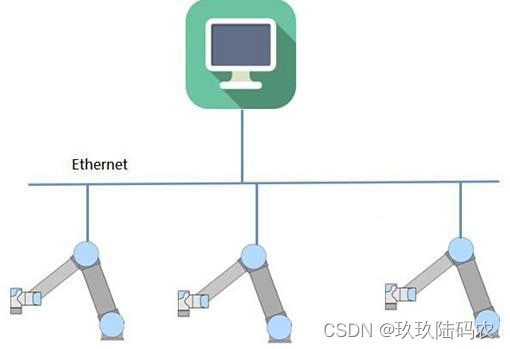
图1 远程控制系统图
下面我们就来介绍UR机器人所提供的相关通讯接口,从而远程控制机器人。
6.3 ModbusTCP端口
MODBUS是OSI模型第7层上的应用层报文传输协议,它在连接至不同类型总线或网络的设备之间提供客户机/服务器通信。自从1979年出现工业串行链路的事实标准以来,MODBUS使成千上万的自动化设备能够通信。目前,继续增加对简单而雅观的MODBUS结构支持。互联网组织能够使TCP/IP栈上的保留系统端口502访问MODBUS。MODBUS是一个请求/应答协议,并且提供功能码规定的服务。MODBUS功能码是MODBUS请求/应答PDU的元素。
UR机器人既可以作为ModbusTCP服务器,也可以作为ModbusTCP客户端,两者的主要区别在于消息请求方的不同。在此,我们仅讨论UR机器人作为ModbusTCP服务器的情况,如图2所示。

图2 Modbus TCP服务器
既然UR机器人作为Modbus TCP服务器,它必定有一系列Modbus地址供上位机来访问。如表2所示。

通过UR机器人的相关Modbus地址,我们可以访问机器人的很多信息,进而可以把这些信息放到上位机上。下图就是通过访问Modbus地址,模仿Polyscope(UR机器人原版软件),制作出来一个界面,当然我们可以通过这个界面监控并控制机器人的所用IO。

6.4Dashboard端口
上位机可以通过29999端口直接发送一些简单的指令给机器人,这些指令是UR自己定义的,这种功能被称为Dashboard。下表就是Dashboard的指令列表。
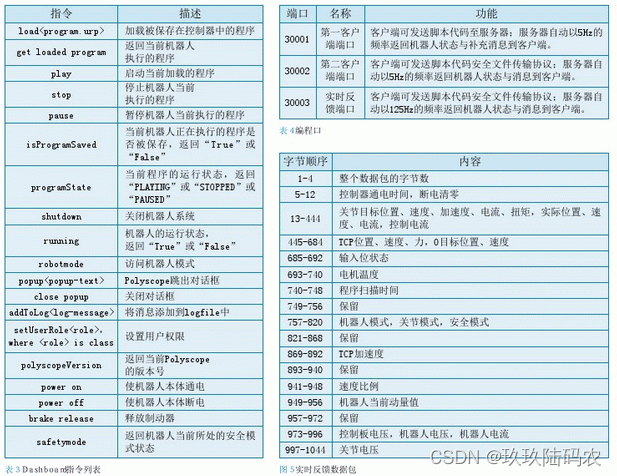
显而易见,我们可以通过一些Dashboard指令,远程切换、加载程序,同时可以启动、暂停、停止程序,这样上位机就可以远程控制程序了。
6.5上位机编程端口
UR机器人有3种编程方式:Polyscope编程、脚本编程以及C-API编程。Polyscope编程指的是程序在示教器上被编辑,机器人然后执行,这是UI层的编程方式。C-API编程是在研发层上的编程方式。我们重点介绍的是脚本编程方式,脚本编程的语言是UR公司在python语言基础上,自己研发的URScript语言。URScript是在脚本层上控制机器人的编程语言,就像其他编程语言一样,它有变量类型,语法结构、方法等。另外,它有一系列的专用方法来控制机器人运动以及IO状态。
UR机器人的控制器是运行在Mini-ITXPC上的,一旦PC启动机器人控制器(就像启动服务一样),Polyscope软件就通过PC本地的TCP/IP端口与机器人控制器建立连接了。同样,当上位机作为客户端,通过30001或30002或30003特定的编程端口,与机器人控制器建立TCP/IP连接,这样我们就可以在上位机上按照URScript语言的格式编写脚本程序,直接发送给机器人控制器,机器人就可以直接执行程序了。
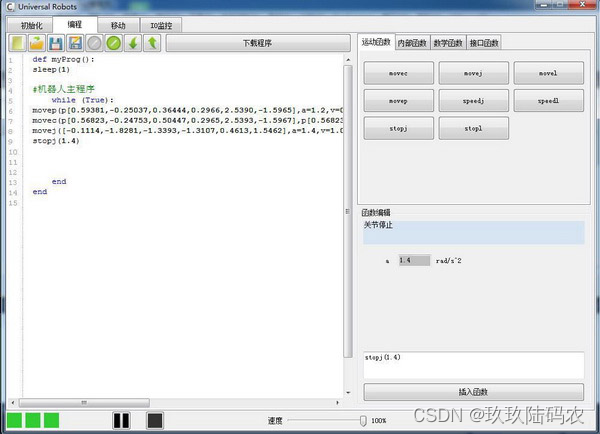
按照上面所述的机器人脚本编程原理,我就可以在上位机上制作如下界面,实现对UR机器人的远程编程。
6.6实时反馈端口
30001、30002、30003除了用于远程编程外,还有其他功能,如表4所述。
这三个端口另一个共同的特点就是,一旦客户端打开端口,就会按照一定的频率收到来自机器人的信息。需要注意的是30003端口是实时反馈端口,客户端每8ms能收到一次来自机器人的信息。另外,通过测试,客户端通过30001和30002只能每200ms左右收到来自机器人的信息。
其实客户端通过这三个端口收到的机器人信息也稍有不同。通过30003端口收到信息是最丰富的,包含了通过30002收到的信息以及通过30001收到的大部分信息。
所以说通过实时反馈端口,客户端收到机器人信息效率是最高的,内容也是最全的。通过实时反馈端口每次收到的数据包有1044个字节,这些字节以标准的格式排列。注意在极少情况下客户端会收到小于1044个字节,但是字节排列的格式不变。表5是1044字节排列的顺序表。
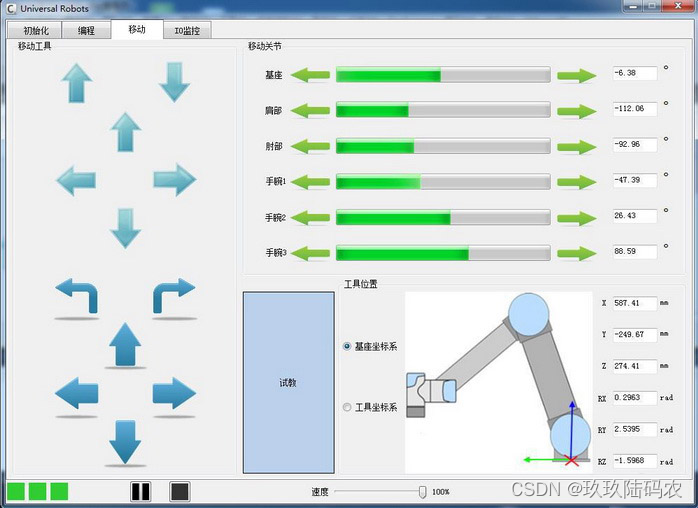
有了这些数据,上位机的数据表现就会十分丰富。下面有2张上位机界面图,“点动图”获取了关节位置、TCP位置;“初始化图”获取了关节模式、关节实际电流、关节电压以及其他数据。

6.7结束语
综上所述,机器人作为ModbusTCP服务器,上位机通过502端口可以控制机器人的所有IO;上位机可以通过30001或30002或30003端口远程下载程序到机器人;上位机通过29999端口可以远程控制程序运行状态;上位机通过30003端口可以实时得到机器人的状态信息。也就是说,利用UR机器人开放的基于TCP/IP协议的端口,可以制作自己的Polyscope软件,实现上位机的远程控制。(end)
相关文章:
UR机器人通信汇总
文章目录 一、概述二、UR机器人通信2.1UR通信协议2.2 UR通信端口 三、UR机器人通信端口类型3.1 Modbus TCP端口(502端口)3.2 Dashboard端口(29999端口)3.3 上位机编程端口(30001/30002/30003端口)3.3.1 URS…...

AI学习指南机器学习篇-使用ID3算法构建决策树
AI学习指南机器学习篇-使用ID3算法构建决策树 介绍ID3算法 ID3(Iterative Dichotomiser 3)是一种用于构建决策树的经典机器学习算法。它是由Ross Quinlan于1986年提出的,是一种基于信息论的算法,用于从一组特征中选择最佳特征来…...
React实战(一)初始化项目、配置router、redux、axios
(一)初始化项目 1.安装项目 npx create-react-app 项目名 编译报错: 解决办法:安装最新的babel-preset-react-app npm install babel-preset-react-applatest 2.配置项目 (1)配置文件目录 (2)使用craco配置webpack.config npm install craco/crac…...

高质量 HarmonyOS 权限管控流程
高质量 HarmonyOS 权限管控流程 在 HarmonyOS 应用开发过程中,往往会涉及到敏感数据和硬件资源的调动和访问,而这部分的调用就会涉及到管控这部分的知识和内容了。我们需要对它有所了解,才可以在应用开发中提高效率和避免踩坑。 权限管控了…...

java里面封装https请求工具类2
其他写法 https://blog.csdn.net/weixin_44372802/article/details/132620809?spm1001.2014.3001.5501 encodeJson 是请求参数的密文格式(大公司都是要对请求参数加密的) ResponseBean 是自己或者对方定义的返回内容参数 public ResponseBean sendByEnc…...

前端面试题日常练-day59 【面试题】
题目 希望这些选择题能够帮助您进行前端面试的准备,答案在文末 1. 在PHP中,以下哪个符号用于比较两个值的相等性? a) b) c) d) ! 2. PHP中的预定义变量$_POST用于获取什么类型的数据? a) 用户的输入数据 b) 浏览器发送的请…...

计算机小问题(4)--关闭联想电脑的小组件
打开联想软件管家,关闭即可 (今天弄了好久才找到,记录一下)...
mac无法读取windows分区怎么办 苹果硬盘怎么读取
对于Mac电脑用户但有Windows系统使用需求的,我们可以通过Boot Camp启动转换助理安装Windows分区这个方案来解决,不过因为两个系统的磁盘格式不同,相应的也会产生一些问题,例如无法正常读取windows分区。下面本文就详细说明mac无法…...

【设计模式】JAVA Design Patterns——State(状态模式)
🔍目的 允许对象在内部状态改变时改变它的行为。对象看起来好像修改了它的类。 🔍解释 真实世界例子 当在长毛象的自然栖息地观察长毛象时,似乎它会根据情况来改变自己的行为。它开始可能很平静但是随着时间推移当它检测到威胁时它会对周围的…...
Docker搭建可道云
Docker搭建可道云(存储) 文章目录 Docker搭建可道云(存储)介绍资源列表基础环境一、安装Docker二、配置Docker加速器三、搭建可道云私有云盘3.1、编写Dockerfile3.2、上传资源到指定目录3.3、查看目录下所有资源 四、构建镜像五、…...

【RISC-V】站在巨人的肩膀上——看开源芯片、软件生态、与先进计算/人工智能/安全的结合
目录 会议议程前言开源处理器芯片的机遇与挑战,孙凝晖,中国工程院院士RISC-V原生基础软件栈,武延军,中国科学院软件研究所RISC-V推动新型架构创新,孟建熠,浙江大学 专题一:开源芯片开源高性能 R…...
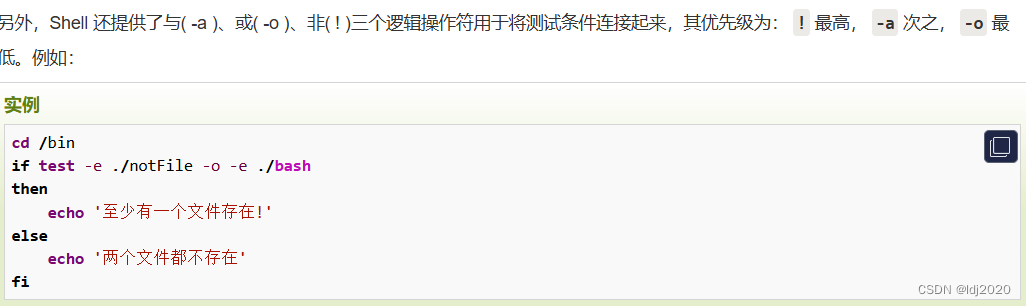
test 判断字符串不为空
#!/bin/bash read -p "请输入参数:" name test -z $name if [ $? -eq 1 ]; then echo "入参:$name" else echo "入参为null" fi...

Python数据分析I
目录 注:简单起见,下文中"df"均写为"表名","函数"均写为"HS","属性"均写为"SX","范围"均写为"FW"。 1.数据分析常用开源库 注释…...
Qt5/6使用SqlServer用户连接操作SqlServer数据库
网上下载SQLServer2022express版数据库,这里没啥可说的,随你喜欢,也可以下载Develop版本。安装完后,我们可以直接连接尝试, 不过一般来说,还是下载SQLServer管理工具来连接数据更加方便。 所以直接下载ssms, 我在用的时候,一开始只能用Windows身份登录。 所以首先,我…...

[经验] 场效应管是如何发挥作用的 #知识分享#学习方法#职场发展
场效应管是如何发挥作用的 在现代电子技术领域,场效应管(MOSFET)是一种重要的半导体元器件。它的作用非常广泛,例如在集成电路中扮演着关键的角色。在本文中,我们将详细探讨场效应管的作用及其在实际应用中的意义。 简…...
数据挖掘--分类
数据挖掘--引论 数据挖掘--认识数据 数据挖掘--数据预处理 数据挖掘--数据仓库与联机分析处理 数据挖掘--挖掘频繁模式、关联和相关性:基本概念和方法 数据挖掘--分类 数据挖掘--聚类分析:基本概念和方法 基本概念 决策树归纳 决策树:决策树是一…...

数据结构篇其六-串
数据结构—串 前置说明 由于学习Java面向对象语言走火入魔,试图在C语言中模拟实现面向对象设计。里面加入了大量的函数指针配合结构体来模拟类中的成员方法 故此篇,亦可称: 面向对象的C语言程序设计 用C语言实现串这种数据结构,并将它应用到…...

队列和栈的实现
本节讲解的队列与栈,如果你对之前的线性和链式结构顺利掌握了,那么下边的队列和栈就小菜一碟了。因为我们会用前两节讲到的东西来实现队列和栈。 之所以放到一起讲是因为这两个东西很类似,队列是先进先出结构(FIFO, first in first out)&…...

lua vm 五: upvalue
前言 在 lua vm 中,upvalue 是一个重要的数据结构。upvalue 以一种高效的方式实现了词法作用域,使得函数能成为 lua 中的第一类值,也因其高效的设计,导致在实现上有点复杂。 函数 (proto) upvalue 构成了闭包(closu…...

React Native中集成ArcGIS以显示地图、渲染自定义图层和获取地理信息数据
在您的数据采集上传的应用中集成ArcGIS以显示地图、渲染自定义图层和获取地理信息数据是一项常见需求。下面是如何实现这些功能的详细指南,包括具体步骤和示例代码。 1. 显示地图 原生开发 Android: 使用ArcGIS Android SDK。您需要在AndroidManifest…...

深入解析:高级 Android 开发工程师职位与面试全攻略
引言:移动互联网时代的核心力量 在当今移动互联网蓬勃发展的时代,智能手机已成为人们日常生活中不可或缺的一部分。作为连接用户与数字服务的桥梁,移动应用扮演着至关重要的角色。而在移动应用的生态中,Android 系统凭借其开放性和庞大的用户基础,占据了全球移动操作系统…...

SVM支持向量机核函数选择避坑指南:从线性到RBF,如何根据你的数据特征做决定?
SVM核函数选择实战指南:从数据特征到模型调优的全流程解析 第一次在Scikit-learn中调用SVC类时,面对kernel参数下拉菜单里linear、poly、rbf、sigmoid四个选项,我盯着屏幕发了五分钟呆——这感觉就像走进一家高级餐厅,服务员递来一…...

KMS_VL_ALL_AIO激活工具完全指南:从问题诊断到长效管理
KMS_VL_ALL_AIO激活工具完全指南:从问题诊断到长效管理 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 如何诊断Windows/Office激活失败的核心原因? 1.1 激活失败的三大…...

墨语灵犀在互联网产品设计中的应用:用户需求分析与PRD生成
墨语灵犀在互联网产品设计中的应用:用户需求分析与PRD生成 每次产品评审会前,你是不是也经历过这样的夜晚?面对一堆零散的用户反馈、模糊的市场数据和脑子里盘旋的初步想法,要在短短几天内把它们梳理成一份逻辑清晰、结构完整的产…...

轻量级百度搜索结果获取解决方案:让数据获取不再复杂
轻量级百度搜索结果获取解决方案:让数据获取不再复杂 【免费下载链接】python-baidusearch 自己手写的百度搜索接口的封装,pip安装,支持命令行执行。Baidu Search unofficial API for Python with no external dependencies 项目地址: http…...
)
flbook电子书下载神器!用这招把网页变PDF(Python+JS双解法)
从网页到PDF:PythonJS双引擎实现FlBook电子书高效归档方案 在数字阅读时代,电子书平台已成为获取知识的重要渠道,但许多优质内容往往缺乏便捷的下载选项。对于技术从业者和数字内容管理者而言,掌握将在线电子书转化为可离线保存的…...

PyTorch 2.8镜像保姆级教程:vim配置Python开发环境+代码补全+调试快捷键
PyTorch 2.8镜像保姆级教程:vim配置Python开发环境代码补全调试快捷键 1. 环境准备与快速验证 在开始配置vim开发环境前,我们先确认PyTorch 2.8镜像已正确运行。打开终端,执行以下命令验证GPU是否可用: python -c "import…...
)
游戏玩家如何选?网易UU/ToDesk远程控制延迟实测(含手机投屏技巧)
游戏玩家专属远程控制工具深度评测:延迟、画质与投屏技巧全解析 作为一名资深游戏玩家,你是否遇到过这样的场景:出差在外想用手机继续刷副本,却苦于找不到合适的远程控制方案;或是想在平板上玩PC独占的3A大作ÿ…...

luci-app-unblockneteasemusic 插件完整技术指南:实现网易云音乐播放限制解除
luci-app-unblockneteasemusic 插件完整技术指南:实现网易云音乐播放限制解除 【免费下载链接】luci-app-unblockneteasemusic [OpenWrt] 解除网易云音乐播放限制 项目地址: https://gitcode.com/gh_mirrors/lu/luci-app-unblockneteasemusic luci-app-unblo…...
高效构建多股数据面板)
TuShare实战(二)高效构建多股数据面板
1. 为什么需要多股数据面板 做量化投资的朋友都知道,数据准备是最基础也最耗时的环节。想象一下,你正在研究一个投资策略,需要同时分析5只股票的历史走势。如果每次都要单独获取、整理每只股票的数据,那效率实在太低了。这就是为什…...