ROS基础学习-ROS通信机制进阶
ROS通信机制进阶
目录
- 0.简介
- 1.常用API
- 1.1 节点初始化函数
- 1.1.1 C++
- 1.1.2 Python
- 1.2 话题与服务相关函数
- 1.2.1 对象获取相关
- 1.2.1.1 C++
- 1.2.1.2 Python
- 1.2.2 订阅对象相关
- 1.2.2.1 C++
- 1.2.2.2 Python
- 1.2.3 服务对象相关函数
- 1.2.3.1 C++
- 1.2.3.2 Python
- 1.2.4 客户端对象相关
- 1.2.4.1 C++
- 1.2.4.2 Python
- 2.回旋函数
- 2.1 C++
- 2.2 Python
- 3.时间
- 3.1 时刻
- 3.1.1 C++
- 3.1.2 Python
- 3.2 持续时间
- 3.3 持续时间与时刻运算
- 3.4 设置运行频率
- 3.5 定时器
0.简介
前面的都是粗粒度的通信框架基础,没有详细介绍涉及的API,也没有封装代码,后面研究更深入的东西。
- ROS常用API
- ROS中自定义头文件与源文件的使用
1.常用API
参考官方API文档或参考源码:
- ROS节点的初始化相关API;
- NodeHandle 的基本使用相关API;
- 话题的发布方,订阅方对象相关API;
- 服务的服务端,客户端对象相关API;
- 时间相关API;
- 日志输出相关API;
- 参数服务器相关API.
另请参考:
http://wiki.ros.org/APIs
https://docs.ros.org/en/api/roscpp/html/
1.1 节点初始化函数
1.1.1 C++
/** @brief ROS初始化函数。* 该函数可以解析并使用节点,* 启动时传入的参数(通过参数设置节点名称、命名空间...) * 该函数有多个重载版本,如果使用NodeHandle建议调用该版本。 * \param argc 参数个数* \param argv 参数列表* \param name 节点名称,需要保证其唯一性,不允许重名节点,不允许包含命名空间* \param options 节点启动选项,被封装进了ros::init_options*/
void init(int &argc, char **argv, const std::string& name, uint32_t options = 0);
1.argc,argv的使用, 如果按照ROS中特定格式传入是实参,那么ROS可以加以使用,比如用来设置全局参数,给节点重命名…
2.options的使用,节点名称需要保证唯一,会导致一个问题,同一个节点不能重复启动
结果:ROS中当有重名的节点启动时,之前的节点会被关闭
需求:特定场景下,需要一个节点多次启动且能正常运行

解决:设置启动项,ros::init_options::AnonymouusName,当创建ROS节点时,会在用户自定义的节点名称后加随机数,从而避免重名问题。
1.1.2 Python
def init_node(name, argv=None, anonymous=False, log_level=None, disable_rostime=False, disable_rosout=False, disable_signals=False, xmlrpc_port=0, tcpros_port=0):"""在ROS msater中注册节点@param name: 节点名称,必须保证节点名称唯一,节点名称中不能使用命名空间(不能包含 '/')@type name: str@param anonymous: 取值为 true 时,为节点名称后缀随机编号@type anonymous: bool"""1.2 话题与服务相关函数
在 roscpp 中,话题和服务的相关对象一般由 NodeHandle 创建。
NodeHandle还有一个重要作用是可以用于设置命名空间,这是以后的重点。
1.2.1 对象获取相关
1.2.1.1 C++
1.对象获取:
/**
*根据话题生成发布对象
*在ROSmaster注册并返回一个发布者对象,该对象可以发布消息
*使用示例如下:
*ros::Publisher pub = handle.advertise<std_msgs::Empty>("my_topic", 1);
* \param topic 发布消息使用的话题
* \param queue_size 等待发送给订阅者的最大消息数量
* \param latch (optional) 如果为 true,该话题发布的最后一条消息将被保存,并且后期当有订阅者连接时会将该消息发送给订阅者
* \return 调用成功时,会返回一个发布对象
*/
template <class M>
Publisher advertise(const std::string& topic, uint32_t queue_size, bool latch = false)latch参数设置为true时,导航时地图发送,设置为true,当有新订阅方订阅时就将地图发布过去。
以静态地图发布为例,,方案1,可以使用固定频率发送地图数据,但是效率底;方案2,可以将地图发布对象对象的latch设置为true,并且发布方只发送一次数据,每当订阅连接时,将地图数据发送给订阅者(只发送一次),这样提高了数据的发送效率。2.消息发布函数:
/**
* 发布消息
*/
template <typename M>
void publish(const M& message) const1.2.1.2 Python
1.对象获取
class Publisher(Topic):"""在ROS master注册为相关话题的发布方"""def __init__(self, name, data_class, subscriber_listener=None, tcp_nodelay=False, latch=False, headers=None, queue_size=None):"""Constructor@param name: 话题名称 @type name: str@param data_class: 消息类型@param latch: 如果为 true,该话题发布的最后一条消息将被保存,并且后期当有订阅者连接时会将该消息发送给订阅者@type latch: bool@param queue_size: 等待发送给订阅者的最大消息数量@type queue_size: int"""
2.消息发布函数:
def publish(self, *args, **kwds):"""发布消息"""
1.2.2 订阅对象相关
1.2.2.1 C++
1.对象获取
/*** \brief 生成某个话题的订阅对象** 该函数将根据给定的话题在ROS master 注册,并自动连接相同主题的发布方,每接收到一条消息,都会调用回调* 函数,并且传入该消息的共享指针,该消息不能被修改,因为可能其他订阅对象也会使用该消息。* * 使用示例如下:void callback(const std_msgs::Empty::ConstPtr相关文章:
ROS基础学习-ROS通信机制进阶
ROS通信机制进阶 目录 0.简介1.常用API1.1 节点初始化函数1.1.1 C++1.1.2 Python1.2 话题与服务相关函数1.2.1 对象获取相关1.2.1.1 C++1.2.1.2 Python1.2.2 订阅对象相关1.2.2.1 C++1.2.2.2 Python1.2.3 服务对象相关函数1.2.3.1 C++1.2.3.2 Python1.2.4 客户端对象相关1.2.4.…...
 and shallowReadonly())
【Vue3】shallowReactive() and shallowReadonly()
历史小剧场 所谓历史,就是过去的事,它的残酷之处在于:无论你哀嚎,悲伤,痛苦,落寞,追悔,它都无法改变。 一具有名的尸体躺在无数无名的尸体上,这就是所谓的霸业。---- 《明…...

【javaEE初阶】
🌈🌈🌈关于java ⚡⚡⚡java的由来 我们这篇文章主要是来介绍javaEE,一般称为java企业版,实际上java的历史可以追溯到上个世纪90年代,当时主要的语言主流的还是C语言和C,但是在那个时期嵌入式初…...
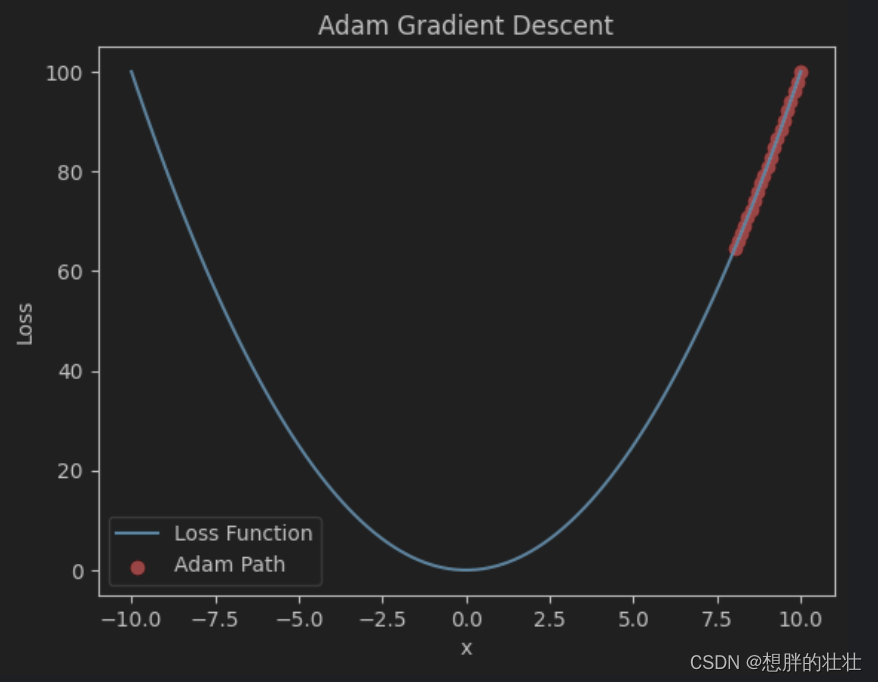
深度学习 - 梯度下降优化方法
梯度下降的基本概念 梯度下降(Gradient Descent)是一种用于优化机器学习模型参数的算法,其目的是最小化损失函数,从而提高模型的预测精度。梯度下降的核心思想是通过迭代地调整参数,沿着损失函数下降的方向前进&#…...

Steam下载游戏很慢?一个设置解决!
博主今天重装系统后,用steam下载发现巨慢 500MB,都要下载半小时。 平时下载软件,一般1分钟就搞定了,于是大致就知道,设置应该出问题了 于是修改了,如下设置之后,速度翻了10倍。 如下&#x…...

51单片机采用定时器T1的方式1的中断计数方式,外接开关K4按4次后,8只LED闪烁不停
1、功能描述 采用定时器T1的方式1的中断计数方式,外接开关K4按4次后,8只LED闪烁不停 2、实验原理 定时器原理:8051的定时器可以用于计数外部事件或执行内部定时操作。在本程序中,定时器1被设置为模式2,即8位自动重装载定时器模式…...

windows系统 flutter 开发环境配置
1、管理员运行powershell,安装:Chocolatey 工具,粘贴复制运行下列脚本: Chocolatey 官方安装文档 Set-ExecutionPolicy Bypass -Scope Process -Force; [System.Net.ServicePointManager]::SecurityProtocol [System.Net.ServicePointManage…...
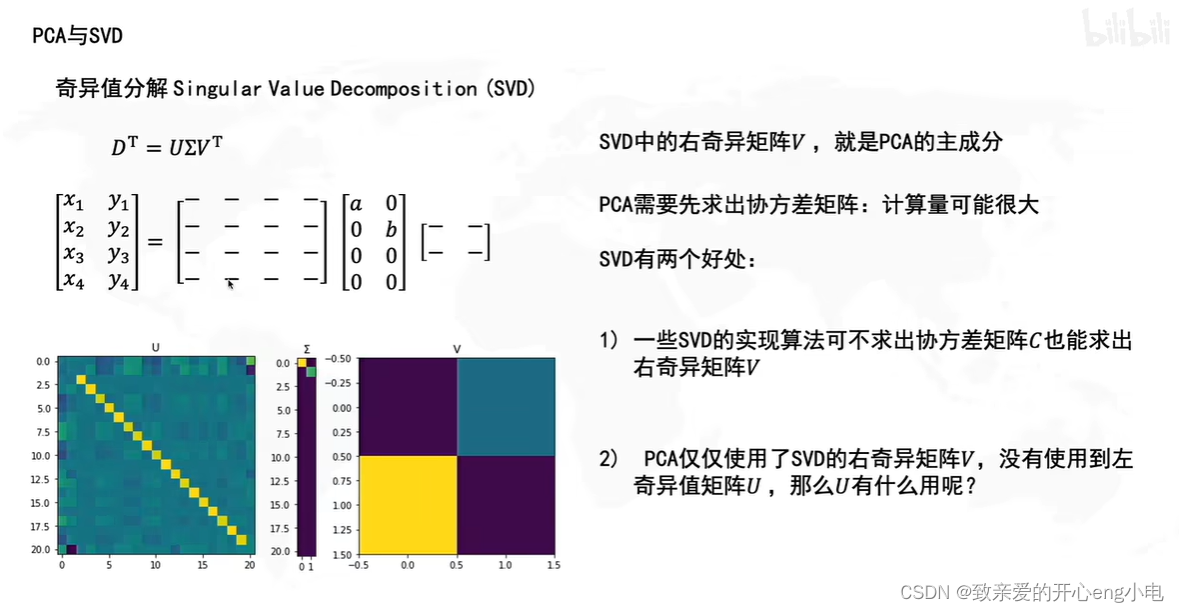
【线性代数】SVDPCA
用最直观的方式告诉你:什么是主成分分析PCA_哔哩哔哩_bilibili 奇异值分解singular value decomposition,SVD principal component analysis,PCA 降维操作 pca就是降维后使得信息损失最小 投影在坐标轴上的点越分散,信息保留越多 pca的实现…...

1.Vue2使用ElementUI-初识及环境搭建
目录 1.下载nodejs v16.x 2.设置淘宝镜像源 3.安装脚手架 4.创建一个项目 5.项目修改 代码地址:source-code: 源码笔记 1.下载nodejs v16.x 下载地址:Node.js — Download Node.js 2.设置淘宝镜像源 npm config set registry https://registry.…...
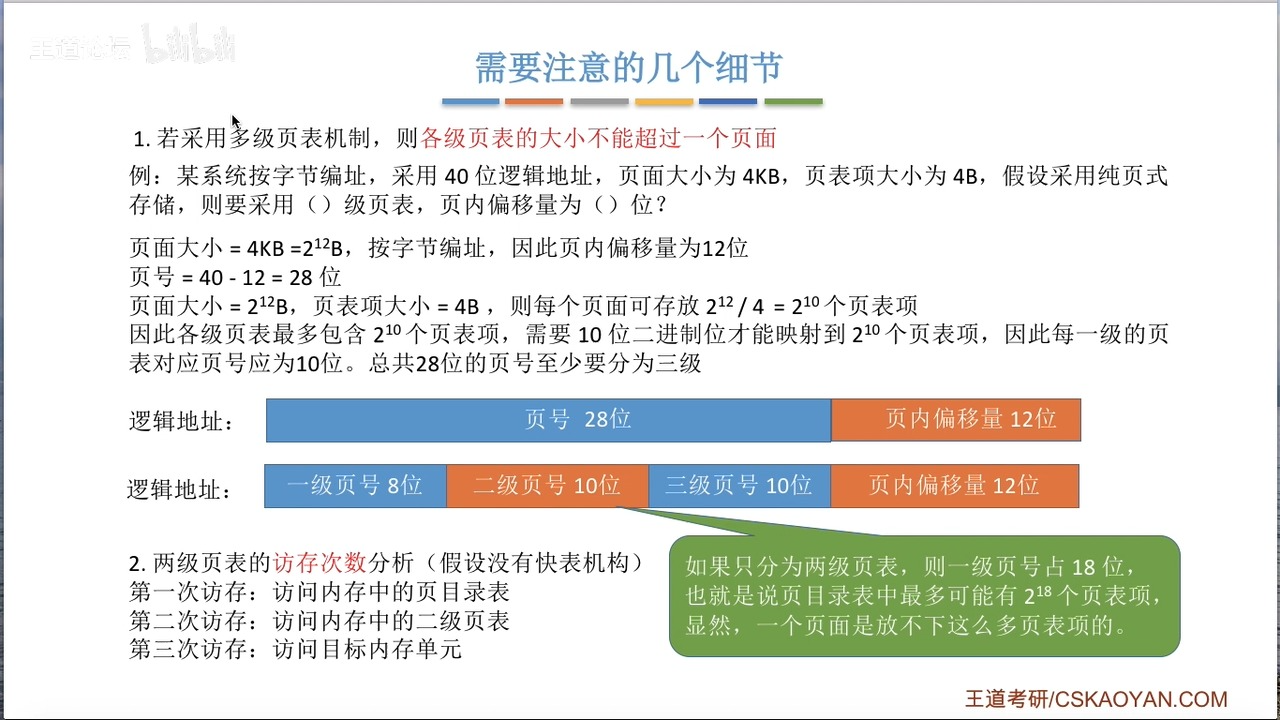
OS复习笔记ch7-3
承接上文我们讲完了页式管理和段式管理,接下来让我们深入讲解一下快表和二级页表 快表 快表和计算机组成原理讲的Cache原理如出一辙。为了减少访存的次数,OS在访问页面的时候创建了快表(Translation Lookaside Buffer ,简称TLB&…...
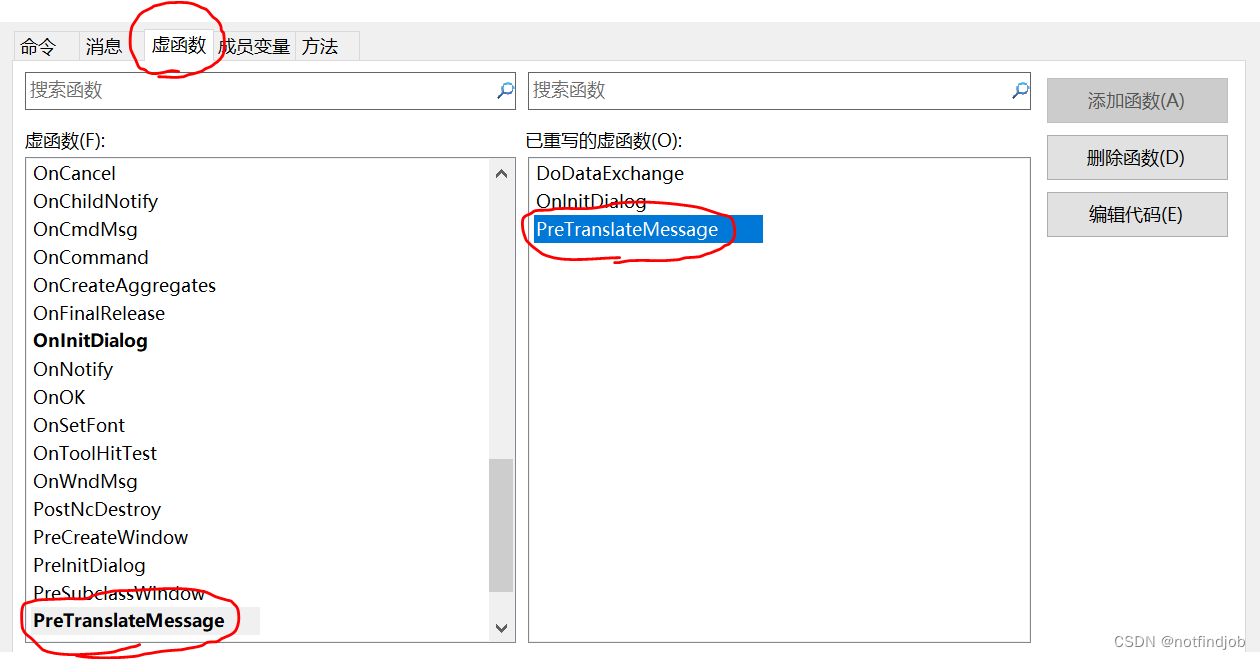
MFC 教程-回车时窗口退出问题
【问题描述】 MFC窗口默认时,按回车窗口会退出 【原因分析】 默认调用OnOK() 【解决办法】 重写虚函PreTranslateMessage BOOL CTESTMFCDlg::PreTranslateMessage(MSG* pMsg) {// TODO: 在此添加专用代码和/或调用基类// 修改回车键的操作反应 if (pMsg->…...
CTFHUB-SQL注入-字符型注入
目录 查询数据库名 查询数据库中的表名 查询表中数据 总结 此题目和上一题相似,一个是整数型注入,一个是字符型注入。字符型注入就是注入字符串参数,判断回显是否存在注入漏洞。因为上一题使用手工注入查看题目 flag ,这里就不…...

Docker配置Redis集群以及主从扩容与缩容
基础镜像拉取 docker run -p 6379:6379 -d redis:6.0.8 配置文件以及数据卷挂载 # 开启密码验证(可选) requirepass 1234 # 允许redis外地连接,需要注释掉绑定的IP # bind 127.0.0.1 # 关闭保护模式(可选) protected-m…...

【计算机网络】 传输层
一、传输层提供的服务 1.1 传输层的功能 1.1.1 传输层的功能如下: 传输层提供应用进程之间的逻辑通信(即端到端的通信)。与网络层的区别是:网络层提供的是主机之间的逻辑通信。 1.1.2 复用和分用 传输层要还要对收到的报文进行…...

山东大学软件学院项目实训-创新实训-基于大模型的旅游平台(二十七)- 微服务(7)
11.1 : 同步调用的问题 11.2 异步通讯的优缺点 11.3 MQ MQ就是事件驱动架构中的Broker 安装MQ docker run \-e RABBITMQ_DEFAULT_USERxxxx \-e RABBITMQ_DEFAULT_PASSxxxxx \--name mq \--hostname mq1 \-p 15672:15672 \-p 5672:5672 \-d \rabbitmq:3-management 浏览器访问1…...

Java Web应用,IPv6问题解决
在Java Web程序中,如果使用Tomcat并遇到了IPv6相关的问题,可以通过以下几种方式来解决: 1. 配置Tomcat以使用IPv4 默认情况下,Java可能会优先使用IPv6。如果你希望Tomcat使用IPv4,最简单的方法是通过设置系统属性来强…...
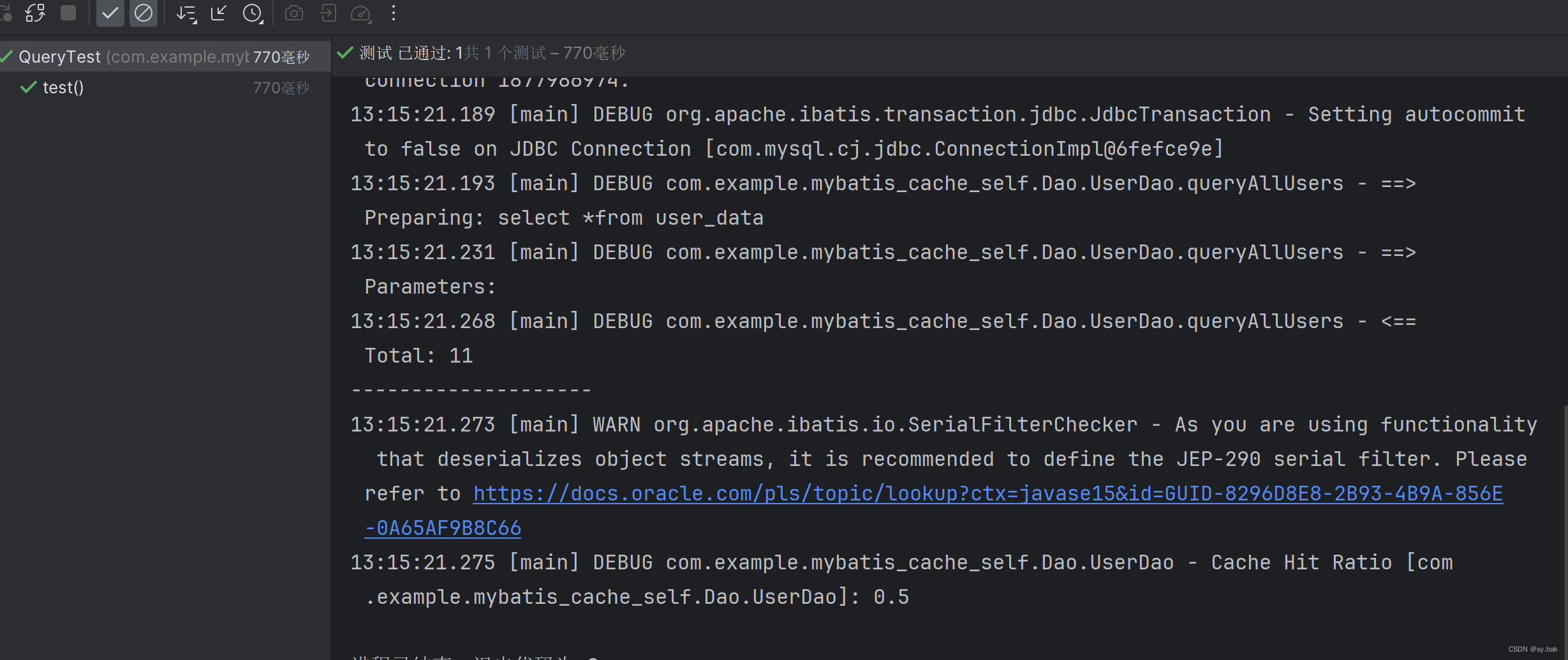
MyBatis二级缓存开启条件
MyBatis缓存为俩层体系。分为一级缓存和二级缓存。 一级缓存: 一级缓存默认开启,一级缓存的作用域是SqlSession级别的,这意味着当你更换SqlSession之后就不能再利用原来的SqlSession的一级缓存了。不同的SqlSession之间的一级缓存是隔离的。…...

golang 不用sleep如何实现实现每隔指定时间执行一次for循环?
今天介绍的是在go语言里面不用time.Sleep, 使用for range 定时器管道 来实现按照我们指定的时间间隔来执行for循环, 即: for range ticker.C { } 这样就实现了for每隔指定时间执行一次,除非管道被关闭,否则for而且会一直柱塞当前线…...
【el-tooltips改造】Vue实现文本溢出才显示el-tooltip,否则不显示el-tooltips
实现原理: 使用disabled属性控制el-tooltip的content显示与隐藏; 目标: 1行省略、多行省略、可缩放页面内的文本省略都有效。 实现方式: 1、自定义全局指令,tooltipAutoShow.js代码如下(参考的el-table中的…...
【Python数据类型的奥秘】:构建程序基石,驾驭信息之海
文章目录 🚀Python数据类型🌈1. 基本概念⭐2. 转化👊3. 数值运算💥4. 数值运算扩展(math库常用函数) 🚀Python数据类型 🌈1. 基本概念 整数(int):整数是没有小数部分的数…...
优化技术与实践)
半导体制造中的光学邻近校正(OPC)优化技术与实践
1. 光学邻近校正(OPC)在半导体制造中的关键作用在32nm以下节点的半导体制造中,光学邻近效应已成为制约光刻精度的首要瓶颈。当特征尺寸远小于曝光波长时(例如193nm光刻下的22nm节点),光线衍射会导致图案边缘…...

【大白话说Java面试题 第49题】【JVM篇】第9题:什么是双亲委派机制?介绍一下运作过程。?
📌 PDF:大白话说Java面试题 — 02-JVM篇 第9题:什么是双亲委派机制?介绍一下运作过程。 📚 回答: 核心概念: 双亲委派机制 是 JVM 中类加载器的工作模式,用于保证类加载的安全性和…...

DeepSeek API调用性能翻倍的7个隐藏配置:90%开发者从未启用的关键参数
更多请点击: https://intelliparadigm.com 第一章:DeepSeek API调用性能翻倍的7个隐藏配置:90%开发者从未启用的关键参数 DeepSeek API 的默认配置虽稳定,但远未释放其底层并发与缓存能力。通过调整七个常被忽略的 HTTP 请求头与…...

PCL2启动器游戏启动失败的终极解决方案:3步快速修复指南
PCL2启动器游戏启动失败的终极解决方案:3步快速修复指南 【免费下载链接】PCL Minecraft 启动器 Plain Craft Launcher(PCL)。 项目地址: https://gitcode.com/gh_mirrors/pc/PCL Plain Craft Launcher 2(PCL2)…...
)
AI全领域热点速递(2026年5月11日)
💌 关心家人,从每日报平安开始。万年历提醒微信小程序,您值得体验。📰 每日整理AI领域核心动态,精选有价值资讯,精简可读,适合收藏备查。🤖 AI全领域热点速递(2026年5月1…...

Rails AI上下文模块设计:领域驱动与AI服务集成实践
1. 项目概述:当植物病理学遇上AI代码助手最近在整理一个老项目时,我遇到了一个非常有意思的命名:“Peronosporaceaevenography165/rails-ai-context”。乍一看,这像是一个典型的GitHub仓库命名风格,前半部分是极其专业…...

如何用Obsidian主页插件打造你的专属数字工作台?
如何用Obsidian主页插件打造你的专属数字工作台? 【免费下载链接】obsidian-homepage Obsidian homepage - Minimal and aesthetic template (with my unique features) 项目地址: https://gitcode.com/gh_mirrors/obs/obsidian-homepage 你是否厌倦了每次打…...

收藏!小白也能入行:AI训练师是什么?值不值?怎么学?
AI冲击重复性岗位,但AI训练师需求激增347%。本文解读AI训练师(非程序员)的工作内容(数据标注、Prompt设计等)、市场数据(薪资60k、缺口百万)、适合人群(内容创作者、白领、应届生&am…...
)
从实验室小白到跑通第一个模型:我的DeepLabCut安装踩坑全记录(Windows 11 + RTX 4060)
从实验室小白到跑通第一个模型:我的DeepLabCut安装踩坑全记录(Windows 11 RTX 4060) 去年刚进实验室时,导师扔给我一篇Nature Methods论文说"试试这个工具",从此开始了与DeepLabCut的"相爱相杀"。…...

CAJ转PDF神器:caj2pdf-qt让学术文献格式转换变得如此简单
CAJ转PDF神器:caj2pdf-qt让学术文献格式转换变得如此简单 【免费下载链接】caj2pdf-qt CAJ 转 PDF 转换器(GUI 版本) 项目地址: https://gitcode.com/gh_mirrors/ca/caj2pdf-qt 还在为CAJ格式的学术文献无法在手机、平板或其他设备上阅…...