【Android】使用EventBus进行线程间通讯
EventBus
简介
EventBus:github
EventBus是Android和Java的发布/订阅事件总线。
- 简化组件之间的通信
-
解耦事件发送者和接收者
-
在 Activities, Fragments, background threads中表现良好
-
避免复杂且容易出错的依赖关系和生命周期问题
-
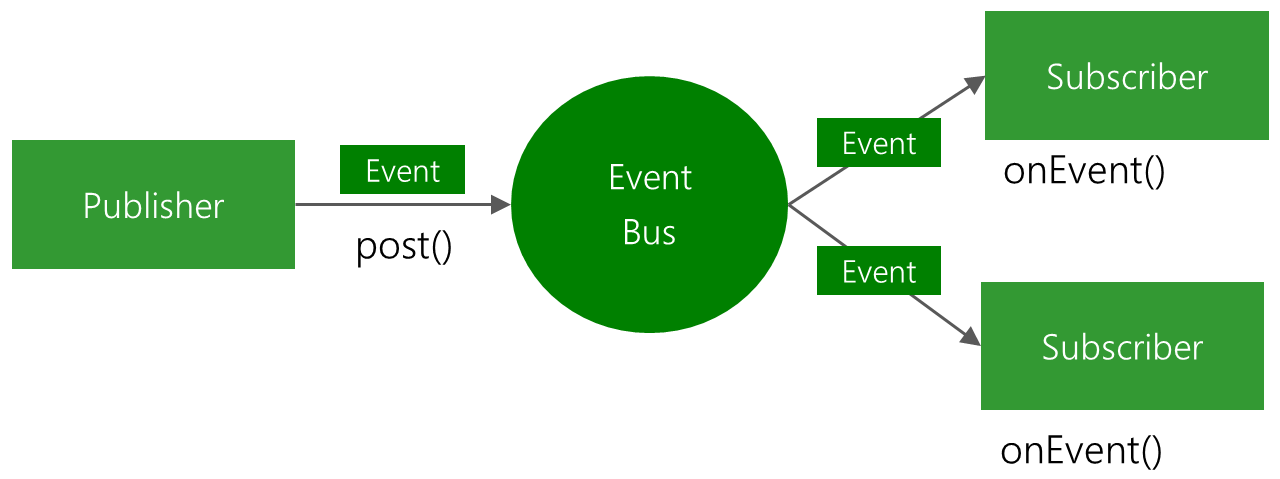
Publisher使用post发出一个Event事件,Subscriber在onEvent()函数中接收事件。
EventBus 是一款在 Android 开发中使用的发布/订阅事件总线框架,基于观察者模式,将事件的接收者和发送者分开,简化了组件之间的通信,使用简单、效率高、体积小!下边是官方的 EventBus 原理图:
导入
Android Projects:
implementation("org.greenrobot:eventbus:3.2.0")
Java Projects:
implementation("org.greenrobot:eventbus-java:3.2.0")
<dependency><groupId>org.greenrobot</groupId><artifactId>eventbus-java</artifactId><version>3.2.0</version>
</dependency>
配置
配置混淆文件
-keepattributes *Annotation*
-keepclassmembers class * {@org.greenrobot.eventbus.Subscribe <methods>;
}
-keep enum org.greenrobot.eventbus.ThreadMode { *; }# If using AsyncExecutord, keep required constructor of default event used.
# Adjust the class name if a custom failure event type is used.
-keepclassmembers class org.greenrobot.eventbus.util.ThrowableFailureEvent {<init>(java.lang.Throwable);
}# Accessed via reflection, avoid renaming or removal
-keep class org.greenrobot.eventbus.android.AndroidComponentsImpl
使用
简单流程
- 创建事件类
public static class MessageEvent { /* Additional fields if needed */ }
- 在需要订阅事件的地方,声明订阅方法并注册EventBus。
@Subscribe(threadMode = ThreadMode.MAIN)
public void onMessageEvent(MessageEvent event) {// Do something
}
public class EventBusActivity extends AppCompatActivity {@Overrideprotected void onCreate(@Nullable Bundle savedInstanceState) {super.onCreate(savedInstanceState);}@Overrideprotected void onStart() {super.onStart();//注册EventBusEventBus.getDefault().register(this);}//接收事件@Subscribe(threadMode = ThreadMode.POSTING, sticky = true, priority = 1)public void onReceiveMsg(MessageEvent message){Log.e("EventBus_Subscriber", "onReceiveMsg_POSTING: " + message.toString());}//接收事件@Subscribe(threadMode = ThreadMode.MAIN, sticky = true, priority = 1)public void onReceiveMsg1(MessageEvent message){Log.e("EventBus_Subscriber", "onReceiveMsg_MAIN: " + message.toString());}//接收事件@Subscribe(threadMode = ThreadMode.MAIN_ORDERED, sticky = true, priority = 1)public void onReceiveMsg2(MessageEvent message){Log.e("EventBus_Subscriber", "onReceiveMsg_MAIN_ORDERED: " + message.toString());}@Overrideprotected void onDestroy() {super.onDestroy();//取消事件EventBus.getDefault().unregister(this);}
}
- 提交订阅事件
@OnClick(R2.id.send_event_common)
public void clickCommon(){MessageEvent message = new MessageEvent(1, "这是一条普通事件");EventBus.getDefault().post(message);
}@OnClick(R2.id.send_event_sticky)
public void clickSticky(){MessageEvent message = new MessageEvent(1, "这是一条黏性事件");EventBus.getDefault().postSticky(message);
}
Subcribe注解
Subscribe是EventBus自定义的注解,共有三个参数(可选):threadMode、boolean sticky、int priority。 完整的写法如下:
@Subscribe(threadMode = ThreadMode.MAIN,sticky = true,priority = 1)
public void onReceiveMsg(MessageEvent message) {Log.e(TAG, "onReceiveMsg: " + message.toString());
}
priority
priority是优先级,是一个int类型,默认值为0。值越大,优先级越高,越优先接收到事件。
值得注意的是,只有在post事件和事件接收处理,处于同一个线程环境的时候,才有意义。
sticky
sticky是一个boolean类型,默认值为false,默认不开启黏性sticky特性,那么什么是sticky特性呢?
上面的例子都是对订阅者 (接收事件) 先进行注册,然后在进行post事件。
那么sticky的作用就是:订阅者可以先不进行注册,如果post事件已经发出,再注册订阅者,同样可以接收到事件,并进行处理。
ThreadMode 模式
POSITING:订阅者将在发布事件的同一线程中被直接调用。这是默认值。事件交付意味着最少的开销,因为它完全避免了线程切换。因此,对于已知可以在很短时间内完成而不需要主线程的简单任务,推荐使用这种模式。使用此模式的事件处理程序必须快速返回,以避免阻塞发布线程(可能是主线程)。
MAIN:在Android上,订阅者将在Android的主线程(UI线程)中被调用。如果发布线程是主线程,将直接调用订阅者方法,阻塞发布线程。否则,事件将排队等待交付(非阻塞)。使用此模式的订阅者必须快速返回以避免阻塞主线程。如果不是在Android上,行为与POSITING相同。
MAIN_ORDERED:在Android上,订阅者将在Android的主线程(UI线程)中被调用。与MAIN不同的是,事件将始终排队等待交付。这确保了post调用是非阻塞的。
BACKGROUND:在Android上,订阅者将在后台线程中被调用。如果发布线程不是主线程,订阅者方法将在发布线程中直接调用。如果发布线程是主线程,EventBus使用一个后台线程,它将按顺序传递所有事件。使用此模式的订阅者应尽量快速返回,以避免阻塞后台线程。如果不是在Android上,总是使用一个后台线程。
ASYNC:订阅服务器将在单独的线程中调用。这始终独立于发布线程和主线程。使用此模式发布事件从不等待订阅者方法。如果订阅者方法的执行可能需要一些时间,例如网络访问,则应该使用此模式。避免同时触发大量长时间运行的异步订阅者方法,以限制并发线程的数量。EventBus使用线程池来有效地重用已完成的异步订阅者通知中的线程。
/*** Each subscriber method has a thread mode, which determines in which thread the method is to be called by EventBus.* EventBus takes care of threading independently from the posting thread.* * @see EventBus#register(Object)* @author Markus*/
public enum ThreadMode {/*** Subscriber will be called directly in the same thread, which is posting the event. This is the default. Event delivery* implies the least overhead because it avoids thread switching completely. Thus this is the recommended mode for* simple tasks that are known to complete in a very short time without requiring the main thread. Event handlers* using this mode must return quickly to avoid blocking the posting thread, which may be the main thread.*/POSTING,/*** On Android, subscriber will be called in Android's main thread (UI thread). If the posting thread is* the main thread, subscriber methods will be called directly, blocking the posting thread. Otherwise the event* is queued for delivery (non-blocking). Subscribers using this mode must return quickly to avoid blocking the main thread.* If not on Android, behaves the same as {@link #POSTING}.*/MAIN,/*** On Android, subscriber will be called in Android's main thread (UI thread). Different from {@link #MAIN},* the event will always be queued for delivery. This ensures that the post call is non-blocking.*/MAIN_ORDERED,/*** On Android, subscriber will be called in a background thread. If posting thread is not the main thread, subscriber methods* will be called directly in the posting thread. If the posting thread is the main thread, EventBus uses a single* background thread, that will deliver all its events sequentially. Subscribers using this mode should try to* return quickly to avoid blocking the background thread. If not on Android, always uses a background thread.*/BACKGROUND,/*** Subscriber will be called in a separate thread. This is always independent from the posting thread and the* main thread. Posting events never wait for subscriber methods using this mode. Subscriber methods should* use this mode if their execution might take some time, e.g. for network access. Avoid triggering a large number* of long running asynchronous subscriber methods at the same time to limit the number of concurrent threads. EventBus* uses a thread pool to efficiently reuse threads from completed asynchronous subscriber notifications.*/ASYNC
}
相关文档
- EventBus详解 (详解 + 原理)
- 三幅图弄懂EventBus核心原理
相关文章:
【Android】使用EventBus进行线程间通讯
EventBus 简介 EventBus:github EventBus是Android和Java的发布/订阅事件总线。 简化组件之间的通信 解耦事件发送者和接收者 在 Activities, Fragments, background threads中表现良好 避免复杂且容易出错的依赖关系和生命周期问题 Publisher使用post发出…...

Leetcode 3179. Find the N-th Value After K Seconds
Leetcode 3179. Find the N-th Value After K Seconds 1. 解题思路2. 代码实现 题目链接:3179. Find the N-th Value After K Seconds 1. 解题思路 这一题的话还是一个动态规划的问题,核心递推关系式为: dp(n, k) dp(n-1, k) dp(n, k)我…...

发光二极管十大品牌
日常电路设计中,LED是必用的元器件之一,辅助判定电路异常。 十大发光二极管品牌-LED灯珠生产厂家哪家好-LED发光二极管厂家前十-Maigoo品牌榜...

nginx配置文件
Nginx是一个高性能的HTTP和反向代理服务器,它的配置文件是其灵活性和强大功能的核心。Nginx的配置文件通常位于 /etc/nginx/nginx.conf 或者 /usr/local/nginx/conf/nginx.conf,取决于你的操作系统和安装路径。配置文件的结构和语法决定了Nginx如何处理请…...
Linux基础I/O
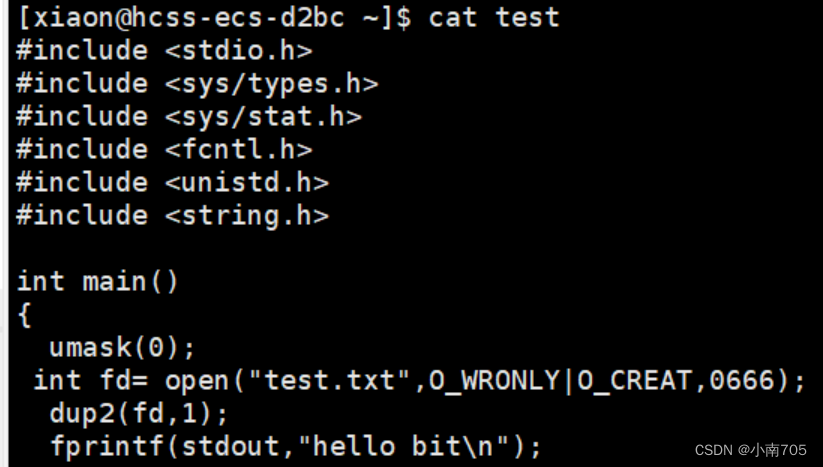
一,系统文件I/O 写文件: #include <stdio.h> #include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <unistd.h> #include <string.h> int main() {umask(0);int fd open("myfile", O_WRO…...

视觉SLAM14精讲——相机与图像3.1
视觉SLAM14精讲 三维空间刚体运动1.0三维空间刚体运动1.1三维空间刚体运动1.2李群与李代数2.1相机与图像3.1 视觉SLAM14精讲——相机与图像3.1 视觉SLAM14精讲简介相机模型内参K 简介 相机是VSLAM中的核心传感器。本章知识点内容涉及到相机相关的知识以及3D计算视觉的一些基础…...
ARM功耗管理框架之SCP
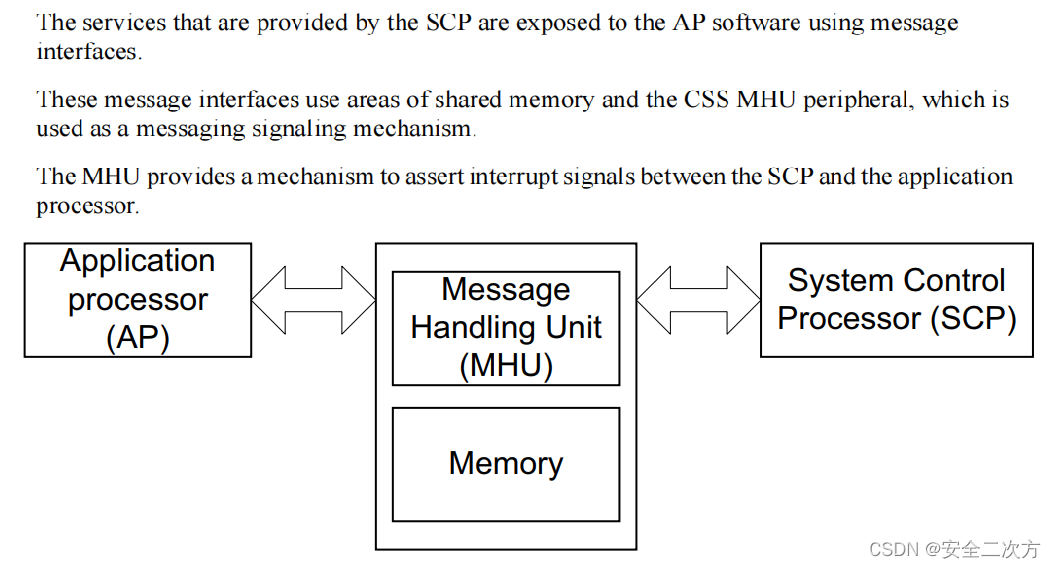
安全之安全(security)博客目录导读 目录 一、功耗管理框架中的SCP 二、SCP的示例 三、SCP固件 四、SCP启动流程 五、SCP的memory map 六、SCP与AP的通信 思考:功耗管理框架?SCP?PPU?LPI?之间的关系?…...

uni-app学习--基础组件使用、页面生命周期、本地存储、网络请求、条件编译、路由跳转
文章目录 1. 基本组件的使用1. text文本组件的使用2. view视图容器组件的使用3. button按钮组件的使用4. image组件的使用5. map组件 2. uni-app中的样式1. uni-app:px2rpx计算 3. uni-app的数据绑定1. 基本的数据绑定2. v-bind,v-for,v-on 4. uni-app的生命周期1. …...

Cweek4+5
C语言学习 十.指针详解 6.有关函数指针的代码 代码1:(*(void (*)())0)(); void(*)()是函数指针类型,0是一个函数的地址 (void(*)())是强制转换 总的是调用0地址处的函数,传入参数为空 代码2:void (*signal(int, void(*)(int))…...

Segment Anything CSharp| 在 C# 中通过 OpenVINO™ 部署 SAM 模型实现万物分割
OpenVINO™ C# API 是一个 OpenVINO™ 的 .Net wrapper,应用最新的 OpenVINO™ 库开发,通过 OpenVINO™ C API 实现 .Net 对 OpenVINO™ Runtime 调用.Segment Anything Model(SAM)是一个基于Transformer的深度学习模型&#x…...
企业应如何选择安全合规的内外网文件摆渡系统?
网络隔离是一种安全措施,旨在将网络划分为不同的部分,以减少安全风险并保护敏感信息。常见的隔离方式像物理隔离、逻辑隔离、防火墙隔离、虚拟隔离、DMZ区隔离等,将网络隔离成内网和外网。内外网文件摆渡通常指在内部网络(内网&am…...

一分钟有60秒,这个有趣的原因你知道吗?
每周跟踪AI热点新闻动向和震撼发展 想要探索生成式人工智能的前沿进展吗?订阅我们的简报,深入解析最新的技术突破、实际应用案例和未来的趋势。与全球数同行一同,从行业内部的深度分析和实用指南中受益。不要错过这个机会,成为AI领…...
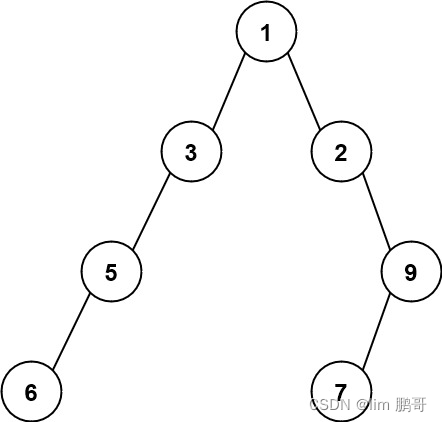
二叉树最大宽度
文章目录 前言二叉树最大宽度1.题目解析2.算法原理3.代码编写 总结 前言 二叉树最大宽度 1.题目解析 给你一棵二叉树的根节点 root ,返回树的 最大宽度 。 树的 最大宽度 是所有层中最大的 宽度 。 每一层的 宽度 被定义为该层最左和最右的非空节点(即…...
自定义HOOK)
React@16.x(24)自定义HOOK
目录 1,介绍2,简单举例2.1,获取数据1.2,计时器 2,自定义 HOOK 相比类组件 1,介绍 将一些常用的,跨组件的函数抽离,做成公共函数也就是 HOOK。自定义HOOK需要按照HOOK的规则来实现&a…...

群体优化算法----树蛙优化算法介绍以及应用于资源分配示例
介绍 树蛙优化算法(Tree Frog Optimization Algorithm, TFO)是一种基于群体智能的优化算法,模拟了树蛙在自然环境中的跳跃和觅食行为。该算法通过模拟树蛙在树枝间的跳跃来寻找最优解,属于近年来发展起来的自然启发式算法的一种 …...

常见汇编指令
下面是一些包含汇编指令 MOV、PUSH、POP、LEA、LDS、ADD、ADC、INC、SUB、SBB、DEC、CMP、MUL、DIV、AND、OR、XOR、NOT、TEST、SHL、SAL、SHR、SAR、ROL、ROR、RCL、RCR、LODS、MOVS 的例题。这些例题展示了每条指令的用法及其作用。 1. MOV 指令 MOV AX, BX ; 将寄存器 B…...

Mysql学习(七)——约束
文章目录 四、约束4.1 概述4.2 约束演示4.3 外键约束 总结 四、约束 4.1 概述 概念:约束是作用于表中字段上的规则,用于限制存储在表中的数据。目的:保证数据库中数据的正确、有效性和完整性。分类: 4.2 约束演示 根据需求&…...

Redis实战篇02
1.分布式锁Redisson 简单介绍: 使用setnx可能会出现的极端问题: Redisson的简介: 简单的使用: 业务代码的改造: private void handleVoucherOrder(VoucherOrder voucherOrder) {Long userId voucherOrder.getUserI…...
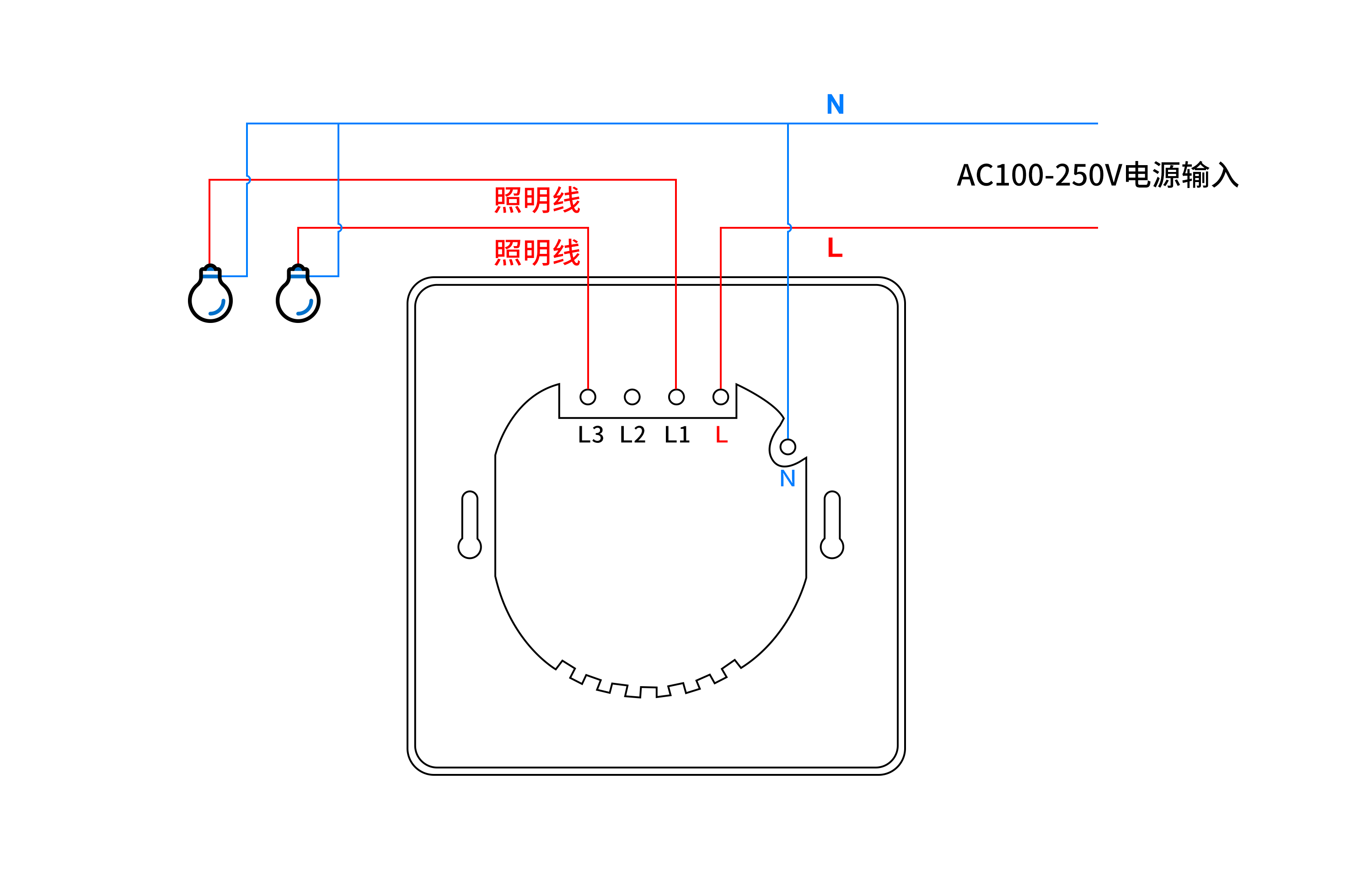
怎么用PHP语言实现远程控制两路照明开关
怎么用PHP语言实现远程控制两路开关呢? 本文描述了使用PHP语言调用HTTP接口,实现控制两路开关,两路开关可控制两路照明、排风扇等电器。 可选用产品:可根据实际场景需求,选择对应的规格 序号设备名称厂商1智能WiFi墙…...

Docker面试整理-什么是多阶段构建?它的好处是什么?
多阶段构建是 Docker 在 Dockerfile 中引入的一个功能,允许你在单个 Dockerfile 中使用多个构建阶段,但最终只生成一个轻量级的镜像。这是通过在一个 Dockerfile 中定义多个 FROM 指令来实现的,每个 FROM 指令都可以使用不同的基础镜像,并开始一个新的构建阶段。 多阶段构建…...

嵌入式测试学习第 12天:串口基础概念:UART、波特率、数据位、校验位
串口基础概念:UART、波特率、数据位、校验位一、串口整体基础概念1、什么是UART串口2、串口实物真实图片① 主板/开发板排针串口② USB转TTL串口模块③ 老式DB9工业串口公头母头二、串口四大核心参数1、波特率概念常用标准固定值通俗理解测试场景2、数据位概念作用3…...

ViewTurbo:基于响应式依赖追踪的前端渲染优化方案
1. 项目概述与核心价值最近在折腾一个挺有意思的开源项目,叫 ViewTurbo。这名字听起来就带点“涡轮增压”的劲儿,事实上,它也确实是一个旨在为视图渲染“加速”的工具。简单来说,ViewTurbo 的核心目标,是解决在复杂前端…...

从Awesome List到个人知识库:开发者如何高效筛选与组织技术资源
1. 项目概述:一份面向开发者的“Awesome List”清单 如果你在GitHub上混迹过一段时间,尤其是热衷于探索前沿技术、寻找优质学习资源或开源项目,那么你大概率见过或者使用过一种特殊的仓库—— Awesome List 。简单来说,这是一个…...

基于RK3568核心板的智能家居控制器:从硬件选型到软件架构实战
1. 项目概述:当智能家居控制器遇上国产高性能核心板最近在做一个智能家居中控的案子,客户对性能、成本和本地化能力要求都比较高。选型阶段,我们团队把市面上主流的几款ARM核心板都摸了一遍,从传统的树莓派CM4到全志、瑞芯微的方案…...

AI智能体工具搜索系统:从MCP协议到语义检索的工程实践
1. 项目概述:从“工具搜索”到“智能体工具箱”的进化 最近在折腾AI智能体(Agent)开发的朋友,估计都绕不开一个核心问题:如何让智能体高效、准确地调用外部工具?无论是让它帮你查天气、发邮件,还…...

雷达目标检测与成像算法实时实现【附代码】
✨ 长期致力于阵列雷达、多输入多输出、现场可编程门阵列、目标检测定位、高分辨成像研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)相控阵和差波束目…...

CFETR重载机械臂精确运动控制验证【附仿真】
✨ 长期致力于中国聚变工程实验堆、遥操作、多功能重载机械臂、路径规划、精确控制、数据融合控制研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)刚柔…...
)
用STM32F103C8T6和HC-05蓝牙模块,从零DIY一辆蓝牙遥控小车(附完整代码与MIT App Inventor教程)
从零打造STM32蓝牙遥控小车:硬件配置到APP开发全指南 项目背景与核心价值 对于嵌入式开发初学者来说,理论知识和实际项目之间往往存在一道难以跨越的鸿沟。而一个完整的硬件项目实践,恰恰是填补这一空白的最佳方式。基于STM32F103C8T6和HC-05…...

FontForge:从零到一的免费字体设计全攻略
FontForge:从零到一的免费字体设计全攻略 【免费下载链接】fontforge Free (libre) font editor for Windows, Mac OS X and GNULinux 项目地址: https://gitcode.com/gh_mirrors/fo/fontforge 你是否曾经想过亲手设计一款属于自己的字体?也许你为…...

QQ截图独立版:免费获取专业级屏幕工具集的完整指南
QQ截图独立版:免费获取专业级屏幕工具集的完整指南 【免费下载链接】QQScreenShot 电脑QQ截图工具提取版,支持文字提取、图片识别、截长图、qq录屏。默认截图文件名为ScreenShot日期 项目地址: https://gitcode.com/gh_mirrors/qq/QQScreenShot 还在为寻找功…...