【python】OpenCV—Blob Detection(11)

学习来自OpenCV基础(10)使用OpenCV进行Blob检测
文章目录
- 1、cv2.SimpleBlobDetector_create 中文文档
- 2、默认 parameters
- 3、配置 parameters
- 附录——cv2.drawKeypoints
1、cv2.SimpleBlobDetector_create 中文文档
cv2.SimpleBlobDetector_create 是 OpenCV 库中用于创建斑点检测器(Blob Detector)的函数。斑点检测是计算机视觉中的一个重要任务,用于检测图像中的小而明亮的区域,通常称为斑点或斑块。下面是 cv2.SimpleBlobDetector_create 函数的中文文档,包括其参数和用法:
一、函数概述
cv2.SimpleBlobDetector_create([params])
- 功能:创建一个 SimpleBlobDetector 对象,用于在图像中检测斑点。
- 参数:
params(可选):一个 SimpleBlobDetector_Params 对象,用于设置斑点检测器的参数。如果未提供,则使用默认参数。
二、参数详解
SimpleBlobDetector_Params 对象包含以下参数,用于调整斑点检测器的行为:
阈值相关参数:
- minThreshold:用于阈值处理的最小值。
- maxThreshold:用于阈值处理的最大值。
- thresholdStep:在 minThreshold 和 maxThreshold 之间递增的步长。
Blob大小参数:
- filterByArea:是否按斑点面积过滤斑点。
- minArea:用于过滤的最小斑点面积。
- maxArea:用于过滤的最大斑点面积。
Blob形状参数:
- filterByCircularity:是否按斑点圆度过滤斑点。
- minCircularity:用于过滤的最小圆度值(范围从0到1,其中1表示完美的圆)。
- maxCircularity:用于过滤的最大圆度值。
Blob凸性参数:
- filterByConvexity:是否按斑点凸性过滤斑点。
- minConvexity:用于过滤的最小凸性值(范围从0到1,其中1表示完全凸的斑点)。
Blob惯性比参数:(它衡量的是一个形状的伸长程度)
- filterByInertia:是否按斑点惯性比过滤斑点。
- minInertiaRatio:用于过滤的最小惯性比值(范围从0到1)。
其他参数:
- minRepeatability:斑点检测的最小重复次数(用于去除噪声)。
- minDistBetweenBlobs:斑点之间的最小距离(用于去除重叠的斑点)。

2、默认 parameters
import cv2
import numpy as npim = cv2.imread("C://Users/Administrator/Desktop/1.jpg", cv2.IMREAD_GRAYSCALE)ver = (cv2.__version__).split('.')
print(ver) # ['4', '4', '0']if int(ver[0]) < 3:detector = cv2.SimpleBlobDetector()
else:detector = cv2.SimpleBlobDetector_create()# 检测blobs
keypoints = detector.detect(im)# 用红色圆圈画出检测到的blobs
im_with_keypoints = cv2.drawKeypoints(im, keypoints, np.array([]), (0,0,255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)# 结果显示
cv2.imshow("Keypoints", im_with_keypoints)
cv2.waitKey(0)
cv2.destroyAllWindows()
输入图像

输出图像

3、配置 parameters
import cv2
import numpy as npim = cv2.imread("C://Users/Administrator/Desktop/3.jpg", cv2.IMREAD_GRAYSCALE)# 设置SimpleBlobDetector参数
params = cv2.SimpleBlobDetector_Params()# 改变阈值
params.minThreshold = 10
params.maxThreshold = 200# 根据面积过滤
params.filterByArea = True
params.minArea = 1500# 根据Circularity过滤
params.filterByCircularity = True
params.minCircularity = 0.1# 根据Convexity过滤
params.filterByConvexity = True
params.minConvexity = 0.87# 根据Inertia过滤
params.filterByInertia = True
params.minInertiaRatio = 0.01# 创建一个带有参数的检测器
ver = (cv2.__version__).split('.')
if int(ver[0]) < 3:detector = cv2.SimpleBlobDetector(params)
else:detector = cv2.SimpleBlobDetector_create(params)# 检测blobs
keypoints = detector.detect(im)# 用红色圆圈画出检测到的blobs
im_with_keypoints = cv2.drawKeypoints(im, keypoints, np.array([]), (0, 0, 255),cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)# 结果显示
cv2.imshow("Keypoints", im_with_keypoints)
cv2.waitKey(0)
输入图片

输出图片

附录——cv2.drawKeypoints
函数定义
- cv2.drawKeypoints(image, keypoints, outImage[, color[, flags]])
参数
-
image:原始图片,数据类型应为 8-bit 单通道或三通道图像。
-
keypoints:关键点列表,通常是由特征点检测算法(如 SIFT、SURF、ORB 等)生成。
-
outImage:输出图像,绘制关键点后的图像将保存在这个变量中。可以设置为原始图像,以在原始图像上直接绘制关键点。
-
color:颜色设置,用于绘制关键点的颜色。它是一个包含三个整数值的元组,分别代表蓝色、绿色和红色的强度,取值范围在 0-255 之间。例如,(255, 0, 0) 表示红色。
-
flags:绘图功能的标识设置,用于控制关键点的绘制方式。它是一个可选参数,可以设置为以下值之一或它们的组合(通过按位或运算 |):
- cv2.DRAW_MATCHES_FLAGS_DEFAULT:创建输出图像矩阵,使用现存的输出图像绘制匹配对和特征点,对每一个关键点只绘制中间点。
- cv2.DRAW_MATCHES_FLAGS_DRAW_OVER_OUTIMG:不创建输出图像矩阵,而是在输出图像上绘制匹配对。
- cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS:对每一个特征点绘制带大小和方向的关键点图形。
- cv2.DRAW_MATCHES_FLAGS_NOT_DRAW_SINGLE_POINTS:单点的特征点不被绘制。
-
返回值
该函数没有直接的返回值,但会将绘制了关键点的图像保存在 outImage 参数中。
相关文章:
【python】OpenCV—Blob Detection(11)
学习来自OpenCV基础(10)使用OpenCV进行Blob检测 文章目录 1、cv2.SimpleBlobDetector_create 中文文档2、默认 parameters3、配置 parameters附录——cv2.drawKeypoints 1、cv2.SimpleBlobDetector_create 中文文档 cv2.SimpleBlobDetector_create 是 O…...

【C++】 基础复习 | 数据类型,输入,输出流 scanf printf
文章目录 1 基本数据类型1.1 基本数据类型1.2 构造类型1.3 指针类型(Pointers) 2 基础输入输出2.1 通过输入输出操作符>> <<2.2 通过scanf和printf输入和输出2.2.1 输出printf 函数2.2.2 输出scanf 函数2.2.3 注意事项 1 基本数据类型 了解…...

linux pxe和无人值守
一 PXE和无人值守 pxe c/s模式 允许客户端通过网络从远程服务器(服务端)下载引导镜像 加载安装文件 实现自动化安装操作系统 无人值守 就是安装选项不需要认为干预 可以自动化实现 pxe的优点 1 规模化 同时装配多台服务器 20多 30台 2 自动化 …...
Questflow借助MongoDB Atlas以AI重新定义未来工作方式
MongoDB客户案例导读 Questflow借助MongoDB Atlas赋能AI员工,助力中小型初创企业自动化工作流程,简化数据分析,提升客户体验,推动AI与员工的协作,重新定义未来工作方式。 协作式AI自动化平台 无需编码即可拥有自己的…...
数值计算精度问题(浮点型和双整型累加精度测试)
这篇博客介绍双整型和浮点数累加精度问题,运动控制轨迹规划公式有大量对时间轴的周期累加过程,如果我们采用浮点数进行累加,势必会影响计算精度。速度的不同 进一步影响位置积分运算。轨迹规划相关问题请参考下面系列文章,这里不再赘述: 1、博途PLC 1200/1500PLC S型速度曲…...

算法训练营day56
题目1:300. 最长递增子序列 - 力扣(LeetCode) class Solution { public:int lengthOfLIS(vector<int>& nums) {// dp数组含义是第i个数的严格递增子序列的长度// 内层的递推公式就是 取 0 到 i - 1之间最大的dp数组 然后 1vector…...
基于STM32的智能水产养殖系统(二)
TPS5433IDR TPS5433IDR 是一款由德州仪器 (Texas Instruments) 生产的高效降压转换器(Buck Converter)。它能够将较高的输入电压转换为较低的输出电压,适用于各种电源管理应用。 主要特性 输入电压范围: 5.5V 至 36V输出电压范围: 0.9V 至 …...

[工具探索]富士mini90拍立得使用指南
文章目录 1. 基本功能介绍1.1 相机外观1.2 电池与胶片 2. 设置相机2.1 装入电池2.2 装入胶片 3. 拍摄模式3.1 标准模式3.2 儿童模式3.3 远景模式3.4 双重曝光模式3.5 Bulb(B)模式3.6 **派对模式**3.7 微距模式3.8 **亮度模式**3.9 **定时拍摄模式**3.10 …...
VMware导入小白分享的MacOS版本之后,无法开机的解决方案
前言 这段时间陆续有小伙伴找到小白,说:导入小白分享的MacOS版本之后,出现无法开机的问题。 遇到这个问题,并不是说明分享版本有问题,因为大部分小伙伴导入之后都没有出现类似的问题,都是导入之后开机&…...

【CSAPP导读】导论
目录 🌈 前言🌈 📁 书籍介绍 📁 阅读路线 📁 总结 🌈 前言🌈 《深入理解计算机系统》书籍是由布赖恩特(Bryant,R.E.)著的一本经典计算机科学教材,常被简称为"CSAPP"&a…...

“新E代弯道王”MAZDA EZ-6亮相2024重庆国际车展
6月7日-6月16日,第二十六届重庆国际车展隆重开幕,合资品牌首款基于纯电平台的新能源轿车MAZDA EZ-6(以下称EZ-6)领衔长安马自达全系车型亮相N8馆T01展台。车展期间,重庆及周边地区的马自达用户、粉丝、车友可前往长安马…...

【lesson11】客户端backUp类的实现
文章目录 成员变量成员函数backUpgetFileIdentifierisNeedUploadupLoadRunMoudle 成员变量 private:std::string _back_dir;//备份文件夹路径名dataManager* _data;//dataManager指针对象成员函数 backUp backUp(const std::string& back_dir, const std::string& b…...
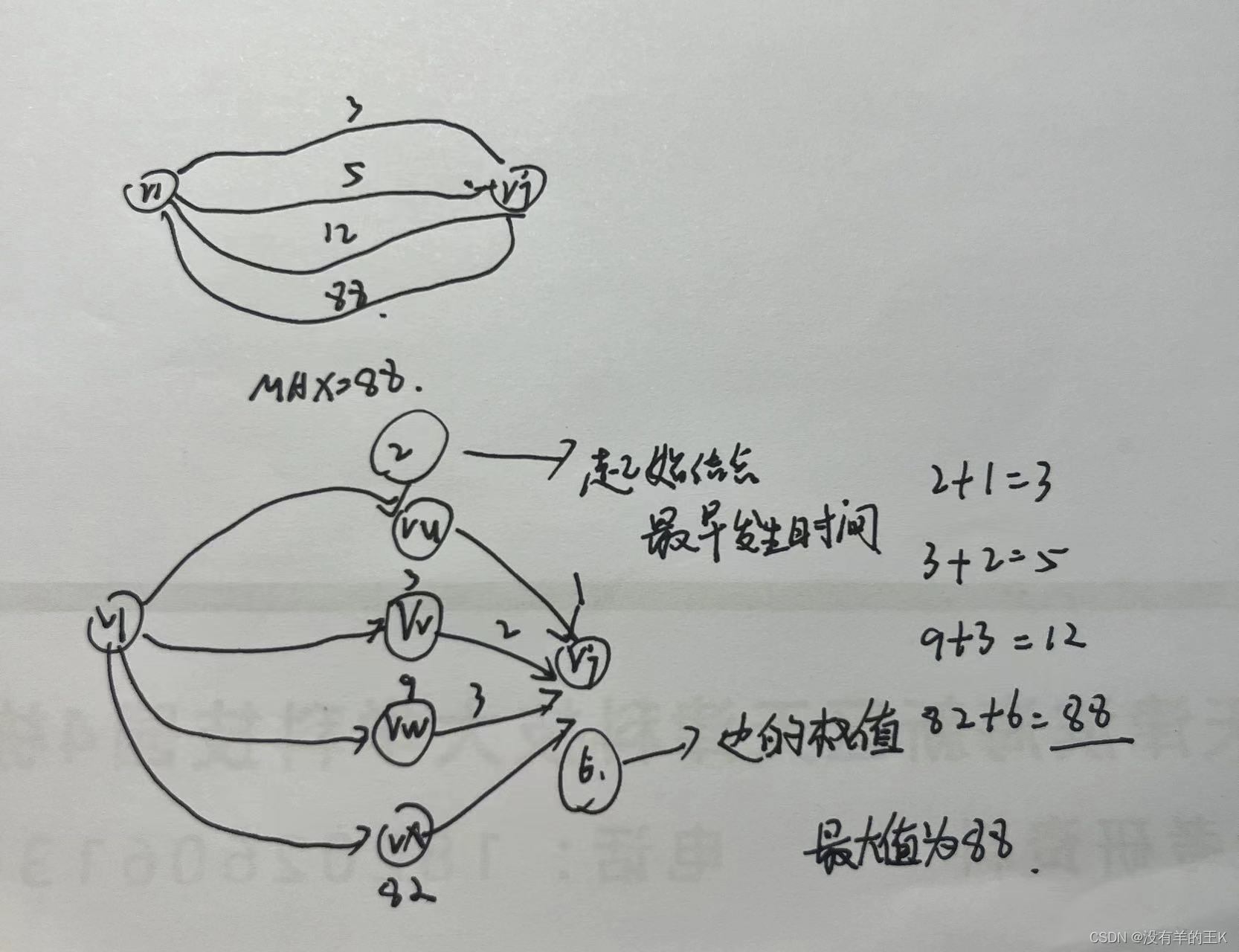
数据结构--关键路径
事件v1-表示整个工程开始(源点:入度为0的顶点) 事件v9-表示整个工程结束(汇点:出度为0的顶点) 关键路径:路径长度最长的路径 求解关键路径问题(AOE网) 定义四个描述量 …...

SSTI注入漏洞
SSTI注入漏洞 1.SSTI注入概述2.SSTI检测工具3.SSTI利用方法Java基本FreeMarker (Java)ThymeleafSpring Framework (Java)Spring视图操作(Java)Smarty (PHP)Twig (PHP)Jade (NodeJS)NUNJUCKS (NodeJS)ERB (Ruby)Jinja2 (Python)Mako (Python)ASP 1.SSTI注…...

Day11 - Day15
Day11 - Day15 Day11(1998年Text1) Perhaps it is humankind’s long suffering at the mercy of flood and drought that makes the idea of forcing the waters to do our bidding so fascinating. 也许正是人类长期在洪水和干旱支配下所遭受的苦难&a…...

启航信息学奥林匹克:青少年NOI学习路线与策略指南
在全球范围内,信息学奥林匹克竞赛(NOI)不仅是青少年展示编程和算法能力的舞台,更是未来计算机科学家和工程师的摇篮。本文将为志在参加NOI的青少年们提供一条清晰的学习路线和实用的建议,帮助你们在这条充满挑战与机遇…...

易舟云财务软件:数字化时代的财务管家
在数字化浪潮的推动下,财务软件成为了企业提升财务管理效率、实现数字化转型的关键工具。易舟云财务软件,正是这样一款深受企业喜爱的财务管理系统。本文将带你详细了解易舟云财务软件的特点、版本区别以及如何使用它来优化财务工作。 易舟云财务软件的特…...
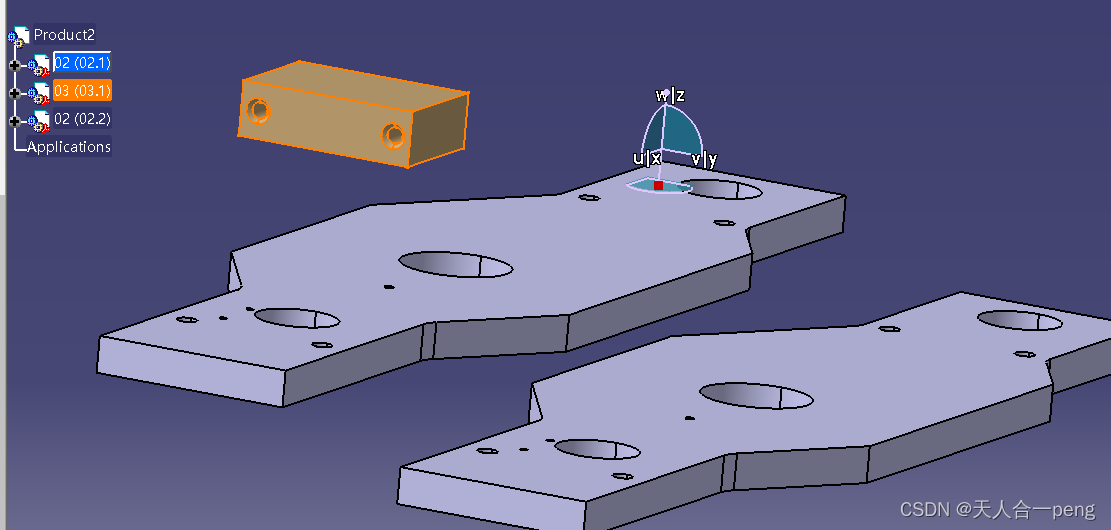
catia零件装配中通过指南针移动零件
1 将零件导入进来后 2 把指南针移动到零件上 具体移动哪个可以通过模型树点击选中,选中那个就可以移动那个。 这种情况需要注意的是 需要双击选择要移动零件的父节点 如下图,Product2蓝色表示是激活的,这样才可以单击选中下面的零件后通过…...
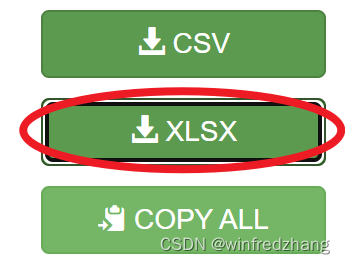
如何使用免费的 Instant Data Scraper快速抓取网页数据
Instant Data Scraper 是一款非常简单易用的网页数据爬虫工具,你不需要任何代码知识,只需要点几下鼠标,就可以把你想要的数据下载到表格里面。以下是详细的使用步骤: 第一步:安装 Instant Data Scraper 打开谷歌浏览…...

【仿真建模-anylogic】事件之手动定时触发
Author:赵志乾 Date:2024-06-11 Declaration:All Right Reserved!!! 问题:建模过程中经常遇到需要临时规划特定逻辑执行时机的场景; 解决方案:在Event的User Control模…...
:降级策略与熔断保护,保证高峰期服务不被大图请求拖垮)
Pytorch图像去噪实战(八十):降级策略与熔断保护,保证高峰期服务不被大图请求拖垮
Pytorch图像去噪实战(八十):降级策略与熔断保护,保证高峰期服务不被大图请求拖垮 一、问题场景:高峰期几个大图请求,把整个服务拖慢 图像去噪服务在高峰期最怕两类请求: 超大图片 高质量模型请求 它们会占用大量 CPU/GPU 时间,导致普通小图请求也变慢。 这时如果没有…...

禅论技术分析插件:通达信量化交易系统的架构与实践
禅论技术分析插件:通达信量化交易系统的架构与实践 【免费下载链接】Indicator 通达信缠论可视化分析插件 项目地址: https://gitcode.com/gh_mirrors/ind/Indicator 禅论作为中国特色的技术分析理论,其严谨的数学结构和逻辑体系为市场分析提供了…...

AI辅助编程工具Cursor在经济学研究中的应用与实战指南
1. 从零开始:为什么经济学家需要AI辅助编程工具 如果你是一名经济学研究者、研究生或者研究助理,我猜你肯定经历过这样的场景:为了清洗一份来自世界银行或国家统计局的复杂面板数据,你对着Stata或者R的代码文档反复调试࿰…...

如何安全导出浏览器Cookie:本地化工具的完整使用教程
如何安全导出浏览器Cookie:本地化工具的完整使用教程 【免费下载链接】Get-cookies.txt-LOCALLY Get cookies.txt, NEVER send information outside. 项目地址: https://gitcode.com/gh_mirrors/ge/Get-cookies.txt-LOCALLY 你是否曾需要将浏览器Cookie导出到…...

从科幻到现实:波色量子18.4亿融资背后,量子计算在多领域应用大突破!
【导语:科幻电影《流浪地球2》中智能量子计算机“MOSS”令人印象深刻,如今量子计算已从实验室走向商业化。波色量子成立三年获11轮融资共18.4亿,其量子计算在多领域展现出巨大应用潜力。】波色量子:资本竞逐中的宠儿按照“十五五规…...

SRWE:Windows窗口实时编辑器的专业应用指南
SRWE:Windows窗口实时编辑器的专业应用指南 【免费下载链接】SRWE Simple Runtime Window Editor 项目地址: https://gitcode.com/gh_mirrors/sr/SRWE 在数字内容创作和游戏开发领域,分辨率限制常常成为技术瓶颈。传统Windows窗口管理系统缺乏灵活…...

AI编程助手集成飞书MCP:零依赖单文件实现工作流自动化
1. 项目概述:连接AI编程助手与飞书工作流 如果你和我一样,每天的工作流都离不开飞书(Lark)——写文档、拉群沟通、排会议日程、更新多维表格,然后在IDE和浏览器之间来回切换,那么你一定会对这个项目感兴趣…...

初创公司如何构建高效董事会:从法律合规到战略增长引擎
1. 创业公司的董事会:从法律义务到增长引擎对于很多初次创业的创始人来说,“董事会”这个词听起来可能既遥远又麻烦。它像是公司法条里一个冷冰冰的规定,或者是在融资时不得不向投资人妥协、让渡控制权的象征。尤其是在公司刚起步、团队只有三…...

ARM GICv4.1 GICD_TYPER2寄存器详解与虚拟化应用
1. GICD_TYPER2寄存器概述 GICD_TYPER2是ARM GICv4.1架构中引入的关键寄存器,属于中断控制器类型寄存器家族。作为GIC Distributor的一部分,它专门用于增强虚拟化场景下的中断管理能力。这个32位寄存器位于内存映射地址Dist_base 0x000C处,仅…...

基于Helm Chart在Kubernetes中部署docker-mailserver邮件服务器
1. 项目概述与核心价值最近在折腾自建邮件服务器,发现了一个宝藏项目:docker-mailserver。它把邮件服务里那些复杂的组件,比如 Postfix、Dovecot、SpamAssassin、ClamAV 这些,全都打包进了一个 Docker 镜像里,开箱即用…...