ROS2底层机制源码分析
-
init
->init_and_remove_ros_arguments
->init
->Context::init 保存初始化传入的信号
->install_signal_handlers→SignalHandler::install 开线程响应信号
->_remove_ros_arguments 移除ros参数
->SingleNodeManager::instance().init
->mogo_recorder::MogoRecorder::instance().Init 中间件录包初始化
->创建全局静态的NodeHandle
-
NodeHandle
-
构造nodehandle,并校验命名空间,内部调用
voidNodeHandle::construct(){SingleNodeManager::instance().increase_ref();} - param->从redis获取配置信息
-
-
create_generic_subscription 订阅接口
-->topics_interface->add_subscription(subscription, options.callback_group);-->voidCallbackGroup::add_subscription(constrclcpp::SubscriptionBase::SharedPtr subscription_ptr) {std::lock_guard<std::mutex> lock(mutex_);subscription_ptrs_.push_back(subscription_ptr);// timer service client waitable一样的逻辑subscription_ptrs_.erase(std::remove_if(subscription_ptrs_.begin(),subscription_ptrs_.end(),[](rclcpp::SubscriptionBase::WeakPtr x) {returnx.expired();}),subscription_ptrs_.end());} -
mogo::AsyncSpinner
/**
* AsyncSpinner 用来异步spin 某一个 callback group
* 如果thread_num =1,将创建一个独立的线程,进行指定callback group的spin
* 如果thread_num >1,将使用multithead spinner 执行callback group的spin
*
* 提示:若只是想要进行整个node的多线程的spin,请使用 mogo::multithread_spin
*/-
构造
-
start
创建执行器,将构造中传入的callback_group对象传入执行器,传入node;单独开个线程spin;多线程spin就是开指定多个线程并行spin动作
voidAsyncSpinner::start(){std::lock_guard<std::mutex> lock(mutex_);if(is_started_) {return;}mogo::spin();if(thread_num_ ==1) {exec_ = rclcpp::executors::SingleThreadedExecutor::make_shared();}else{exec_ = rclcpp::executors::MultiThreadedExecutor::make_shared(rclcpp::ExecutorOptions(), thread_num_);}exec_->add_callback_group(callback_group_,SingleNodeManager::instance().get_node()->get_node_base_interface());// 将回调组跟节点对象存入mapth_ = std::thread([this] {longtid = syscall(SYS_gettid);if(tid >0) {this->th_id_.store((int)tid);}exec_->spin();});is_started_ =true;}voidMultiThreadedExecutor::spin(){if(spinning.exchange(true)) {throwstd::runtime_error("spin() called while already spinning");}RCPPUTILS_SCOPE_EXIT(this->spinning.store(false); );std::vector<std::thread> threads;size_t thread_id =0;{std::lock_guard wait_lock{wait_mutex_};for(; thread_id < number_of_threads_ -1; ++thread_id) {auto func = std::bind(&MultiThreadedExecutor::run,this, thread_id);threads.emplace_back(func);}}run(thread_id);for(auto & thread : threads) {thread.join();}}voidSingleThreadedExecutor::spin(){if(spinning.exchange(true)) {throwstd::runtime_error("spin() called while already spinning");}RCPPUTILS_SCOPE_EXIT(this->spinning.store(false); );while(rclcpp::ok(this->context_) && spinning.load()) {rclcpp::AnyExecutable any_executable;if(get_next_executable(any_executable)) {// 内部从map中取execute_any_executable(any_executable);}}}
-
-
mogo::spin
voidspin(){SingleNodeManager::instance().spin();}voidSingleNodeManager::spin(){if(MOGO_UNLIKELY(!is_start_)) {throwstd::runtime_error("SingleNodeManager is not running, please create NodeHandle before that!");}if(!is_join_exec_) {std::lock_guard<std::mutex> lock(exec_mutex_);if(!is_join_exec_) {exec_->add_node(node_ptr_);is_join_single_exec_ =true;is_join_exec_ =true;}else{if(!is_join_single_exec_) {throwstd::runtime_error("Node has been joined in another exec");}}}exec_->spin();{std::lock_guard<std::mutex> lock(exec_mutex_);exec_->remove_node(node_ptr_);is_join_single_exec_ =false;is_join_exec_ =false;}}// 以subscription为例,以下详细函数调用栈1. 获取可执行对象boolExecutor::get_next_ready_executable_from_map(AnyExecutable & any_executable,constrclcpp::memory_strategy::MemoryStrategy::WeakCallbackGroupsToNodesMap &weak_groups_to_nodes){TRACEPOINT(rclcpp_executor_get_next_ready);bool success =false;std::lock_guard<std::mutex> guard{mutex_};// Check the timers to see if there are any that are readymemory_strategy_->get_next_timer(any_executable, weak_groups_to_nodes);if(any_executable.timer) {success =true;}if(!success) {// Check the subscriptions to see if there are any that are readymemory_strategy_->get_next_subscription(any_executable, weak_groups_to_nodes);if(any_executable.subscription) {success =true;}}...voidget_next_subscription(rclcpp::AnyExecutable & any_exec,constWeakCallbackGroupsToNodesMap & weak_groups_to_nodes) override{auto it = subscription_handles_.begin();while(it != subscription_handles_.end()) {auto subscription = get_subscription_by_handle(*it, weak_groups_to_nodes);if(subscription) {// Find the group for this handle and see if it can be servicedauto group = get_group_by_subscription(subscription, weak_groups_to_nodes);if(!group) {// Group was not found, meaning the subscription is not valid...// Remove it from the ready list and continue lookingit = subscription_handles_.erase(it);continue;}if(!group->can_be_taken_from().load()) {// Group is mutually exclusive and is being used, so skip it for now// Leave it to be checked next time, but continue searching++it;continue;}// Otherwise it is safe to set and return the any_execany_exec.subscription = subscription;any_exec.callback_group = group;any_exec.node_base = get_node_by_group(group, weak_groups_to_nodes);subscription_handles_.erase(it);return;}// Else, the subscription is no longer valid, remove it and continueit = subscription_handles_.erase(it);}}...rclcpp::SubscriptionBase::SharedPtrMemoryStrategy::get_subscription_by_handle(conststd::shared_ptr<constrcl_subscription_t> & subscriber_handle,constWeakCallbackGroupsToNodesMap & weak_groups_to_nodes){for(constauto & pair : weak_groups_to_nodes) {auto group = pair.first.lock();if(!group) {continue;}// check传入的subscriber_handle跟之前创建的是否匹配auto match_subscription = group->find_subscription_ptrs_if([&subscriber_handle](constrclcpp::SubscriptionBase::SharedPtr & subscription) -> bool {returnsubscription->get_subscription_handle() == subscriber_handle;});if(match_subscription) {returnmatch_subscription;}}returnnullptr;}...template<typename Function>rclcpp::SubscriptionBase::SharedPtrfind_subscription_ptrs_if(Function func)const{return_find_ptrs_if_impl<rclcpp::SubscriptionBase, Function>(func, subscription_ptrs_);}template<typename TypeT, typename Function>typename TypeT::SharedPtr _find_ptrs_if_impl(Function func,conststd::vector<typename TypeT::WeakPtr> & vect_ptrs)const{std::lock_guard<std::mutex> lock(mutex_);for(auto & weak_ptr : vect_ptrs) {auto ref_ptr = weak_ptr.lock();if(ref_ptr && func(ref_ptr)) {returnref_ptr;}}returntypename TypeT::SharedPtr();}至此就能匹配到对应的timer service client waitable subscription2. 构造执行器auto it = subscription_handles_.begin();while(it != subscription_handles_.end()) {auto subscription = get_subscription_by_handle(*it, weak_groups_to_nodes);if(subscription) {// Find the group for this handle and see if it can be servicedauto group = get_group_by_subscription(subscription, weak_groups_to_nodes);if(!group) {// Group was not found, meaning the subscription is not valid...// Remove it from the ready list and continue lookingit = subscription_handles_.erase(it);continue;}if(!group->can_be_taken_from().load()) {// Group is mutually exclusive and is being used, so skip it for now// Leave it to be checked next time, but continue searching++it;continue;}// Otherwise it is safe to set and return the any_execany_exec.subscription = subscription;any_exec.callback_group = group;any_exec.node_base = get_node_by_group(group, weak_groups_to_nodes);subscription_handles_.erase(it);return;}// Else, the subscription is no longer valid, remove it and continueit = subscription_handles_.erase(it);}3. 执行voidExecutor::execute_any_executable(AnyExecutable & any_exec){if(!spinning.load()) {return;}if(any_exec.timer) {TRACEPOINT(rclcpp_executor_execute,static_cast<constvoid*>(any_exec.timer->get_timer_handle().get()));execute_timer(any_exec.timer);}if(any_exec.subscription) {TRACEPOINT(rclcpp_executor_execute,static_cast<constvoid*>(any_exec.subscription->get_subscription_handle().get()));execute_subscription(any_exec.subscription);}if(any_exec.service) {execute_service(any_exec.service);}if(any_exec.client) {execute_client(any_exec.client);}if(any_exec.waitable) {any_exec.waitable->execute(any_exec.data);}// Reset the callback_group, regardless of typeany_exec.callback_group->can_be_taken_from().store(true);// Wake the wait, because it may need to be recalculated or work that// was previously blocked is now available.try{interrupt_guard_condition_.trigger();}catch(constrclcpp::exceptions::RCLError & ex) {throwstd::runtime_error(std::string("Failed to trigger guard condition from execute_any_executable: ") + ex.what());}}callback如何传入?业务代码订阅subscription = node_handle_.get_node()->create_generic_subscription(topic_meta.name,topic_meta.type,rosbag2_transport::Rosbag2QoS(queue_size),[this, topic_meta](std::shared_ptr<mogo::SerializedMessage> message) {// TODO 超过Xs没有回调加事件上报if(!mogo::ok())return;count_++;staticdoublenow_timestamp = mogo::TimeHelper::to_sec(mogo::Time::now());// calc hz every secondif(mogo::TimeHelper::to_sec(mogo::Time::now()) - now_timestamp >= mogo::TimeHelper::to_sec(mogo::Time::create(1))) {MOGO_INFO_STREAM_THROTTLE(10,"current callback frequency: "<< count_);count_ =0;now_timestamp = mogo::TimeHelper::to_sec(mogo::Time::now());}pushQueue(OutgoingMessage(message, topic_meta.name, topic_meta.type, mogo::Time::now()));},subscription_options);内层调用注册callbacktemplate<typename AllocatorT = std::allocator<void>>GenericSubscription(rclcpp::node_interfaces::NodeBaseInterface * node_base,conststd::shared_ptr<rcpputils::SharedLibrary> ts_lib,conststd::string & topic_name,conststd::string & topic_type,constrclcpp::QoS & qos,// TODO(nnmm): Add variant for callback with message info. See issue #1604.std::function<void(std::shared_ptr<rclcpp::SerializedMessage>)> callback,constrclcpp::SubscriptionOptionsWithAllocator<AllocatorT> & options): SubscriptionBase(node_base,*rclcpp::get_typesupport_handle(topic_type,"rosidl_typesupport_cpp", *ts_lib),topic_name,options.template to_rcl_subscription_options<rclcpp::SerializedMessage>(qos),true),callback_(callback),ts_lib_(ts_lib){// This is unfortunately duplicated with the code in subscription.hpp.// TODO(nnmm): Deduplicate by moving this into SubscriptionBase.if(options.event_callbacks.deadline_callback) {this->add_event_handler(options.event_callbacks.deadline_callback,RCL_SUBSCRIPTION_REQUESTED_DEADLINE_MISSED);}if(options.event_callbacks.liveliness_callback) {this->add_event_handler(options.event_callbacks.liveliness_callback,RCL_SUBSCRIPTION_LIVELINESS_CHANGED);}if(options.event_callbacks.incompatible_qos_callback) {this->add_event_handler(options.event_callbacks.incompatible_qos_callback,RCL_SUBSCRIPTION_REQUESTED_INCOMPATIBLE_QOS);}elseif(options.use_default_callbacks) {// Register default callback when not specifiedtry{this->add_event_handler([this](QOSRequestedIncompatibleQoSInfo & info) {this->default_incompatible_qos_callback(info);},RCL_SUBSCRIPTION_REQUESTED_INCOMPATIBLE_QOS);}catch(UnsupportedEventTypeException &/*exc*/) {// pass}}if(options.event_callbacks.message_lost_callback) {this->add_event_handler(options.event_callbacks.message_lost_callback,RCL_SUBSCRIPTION_MESSAGE_LOST);}}处理消息voidGenericSubscription::handle_serialized_message(conststd::shared_ptr<rclcpp::SerializedMessage> & message,constrclcpp::MessageInfo &){callback_(message);}消息从哪里来?---boolSubscriptionBase::take_serialized(rclcpp::SerializedMessage & message_out,rclcpp::MessageInfo & message_info_out){rcl_ret_t ret = rcl_take_serialized_message(this->get_subscription_handle().get(),&message_out.get_rcl_serialized_message(),&message_info_out.get_rmw_message_info(),nullptr);if(RCL_RET_SUBSCRIPTION_TAKE_FAILED == ret) {returnfalse;}elseif(RCL_RET_OK != ret) {rclcpp::exceptions::throw_from_rcl_error(ret);}returntrue;}rcl_ret_trcl_take_serialized_message(constrcl_subscription_t * subscription,rcl_serialized_message_t * serialized_message,rmw_message_info_t * message_info,rmw_subscription_allocation_t * allocation){RCUTILS_LOG_DEBUG_NAMED(ROS_PACKAGE_NAME,"Subscription taking serialized message");if(!rcl_subscription_is_valid(subscription)) {returnRCL_RET_SUBSCRIPTION_INVALID;// error already set}RCL_CHECK_ARGUMENT_FOR_NULL(serialized_message, RCL_RET_INVALID_ARGUMENT);// If message_info is NULL, use a place holder which can be discarded.rmw_message_info_t dummy_message_info;rmw_message_info_t * message_info_local = message_info ? message_info : &dummy_message_info;*message_info_local = rmw_get_zero_initialized_message_info();// Call rmw_take_with_info.bool taken =false;rmw_ret_t ret = rmw_take_serialized_message_with_info(subscription->impl->rmw_handle, serialized_message, &taken, message_info_local, allocation);if(ret != RMW_RET_OK) {RCL_SET_ERROR_MSG(rmw_get_error_string().str);returnrcl_convert_rmw_ret_to_rcl_ret(ret);}RCUTILS_LOG_DEBUG_NAMED(ROS_PACKAGE_NAME,"Subscription serialized take succeeded: %s", taken ?"true":"false");if(!taken) {returnRCL_RET_SUBSCRIPTION_TAKE_FAILED;}returnRCL_RET_OK;}注意:这里已经到rmw层了(DDS的封装层)rmw_ret_trmw_take_serialized_message_with_info(constrmw_subscription_t * subscription,rmw_serialized_message_t * serialized_message,bool * taken,rmw_message_info_t * message_info,rmw_subscription_allocation_t * allocation){returnrmw_fastrtps_shared_cpp::__rmw_take_serialized_message_with_info(eprosima_fastrtps_identifier, subscription, serialized_message, taken, message_info,allocation);}核心代码---循环通过data_reader_->take(data_values, info_seq,1)获取数据,最终内存拷贝到serialized_message中带出rmw_ret_t_take_serialized_message(constchar* identifier,constrmw_subscription_t * subscription,rmw_serialized_message_t * serialized_message,bool * taken,rmw_message_info_t * message_info,rmw_subscription_allocation_t * allocation){(void) allocation;*taken =false;RMW_CHECK_TYPE_IDENTIFIERS_MATCH(subscription handle,subscription->implementation_identifier, identifier,returnRMW_RET_INCORRECT_RMW_IMPLEMENTATION)auto info = static_cast<CustomSubscriberInfo *>(subscription->data);RCUTILS_CHECK_FOR_NULL_WITH_MSG(info,"custom subscriber info is null",returnRMW_RET_ERROR);eprosima::fastcdr::FastBuffer buffer;eprosima::fastdds::dds::SampleInfo sinfo;rmw_fastrtps_shared_cpp::SerializedData data;data.is_cdr_buffer =true;data.data = &buffer;data.impl = nullptr;// not used when is_cdr_buffer is trueeprosima::fastdds::dds::StackAllocatedSequence<void*,1> data_values;const_cast<void**>(data_values.buffer())[0] = &data;eprosima::fastdds::dds::SampleInfoSeq info_seq{1};while(ReturnCode_t::RETCODE_OK == info->data_reader_->take(data_values, info_seq,1)) {auto reset = rcpputils::make_scope_exit([&](){data_values.length(0);info_seq.length(0);});if(info_seq[0].valid_data) {auto buffer_size = static_cast<size_t>(buffer.getBufferSize());if(serialized_message->buffer_capacity < buffer_size) {auto ret = rmw_serialized_message_resize(serialized_message, buffer_size);if(ret != RMW_RET_OK) {returnret;// Error message already set}}serialized_message->buffer_length = buffer_size;memcpy(serialized_message->buffer, buffer.getBuffer(), serialized_message->buffer_length);if(message_info) {_assign_message_info(identifier, message_info, &info_seq[0]);}*taken =true;break;}}returnRMW_RET_OK;}fastrtps-fastdds---查数据ReturnCode_t DataReaderImpl::read_or_take(LoanableCollection& data_values,SampleInfoSeq& sample_infos,int32_t max_samples,constInstanceHandle_t& handle,SampleStateMask sample_states,ViewStateMask view_states,InstanceStateMask instance_states,bool exact_instance,bool single_instance,bool should_take){if(reader_ == nullptr){returnReturnCode_t::RETCODE_NOT_ENABLED;}ReturnCode_t code = check_collection_preconditions_and_calc_max_samples(data_values, sample_infos, max_samples);if(!code){returncode;}#ifHAVE_STRICT_REALTIMEauto max_blocking_time = std::chrono::steady_clock::now() +std::chrono::microseconds(::TimeConv::Time_t2MicroSecondsInt64(qos_.reliability().max_blocking_time));std::unique_lock<RecursiveTimedMutex> lock(reader_->getMutex(), std::defer_lock);if(!lock.try_lock_until(max_blocking_time)){returnReturnCode_t::RETCODE_TIMEOUT;}#elsestd::lock_guard<RecursiveTimedMutex> _(reader_->getMutex());#endif// if HAVE_STRICT_REALTIMEset_read_communication_status(false);auto it = history_.lookup_available_instance(handle, exact_instance);if(!it.first){if(exact_instance && !history_.is_instance_present(handle)){returnReturnCode_t::RETCODE_BAD_PARAMETER;}else{returnReturnCode_t::RETCODE_NO_DATA;}}code = prepare_loan(data_values, sample_infos, max_samples);if(!code){returncode;}detail::StateFilter states{ sample_states, view_states, instance_states };detail::ReadTakeCommand cmd(*this, data_values, sample_infos, max_samples, states, it.second, single_instance);while(!cmd.is_finished()){cmd.add_instance(should_take);}returncmd.return_value();} -
create_publisher
-
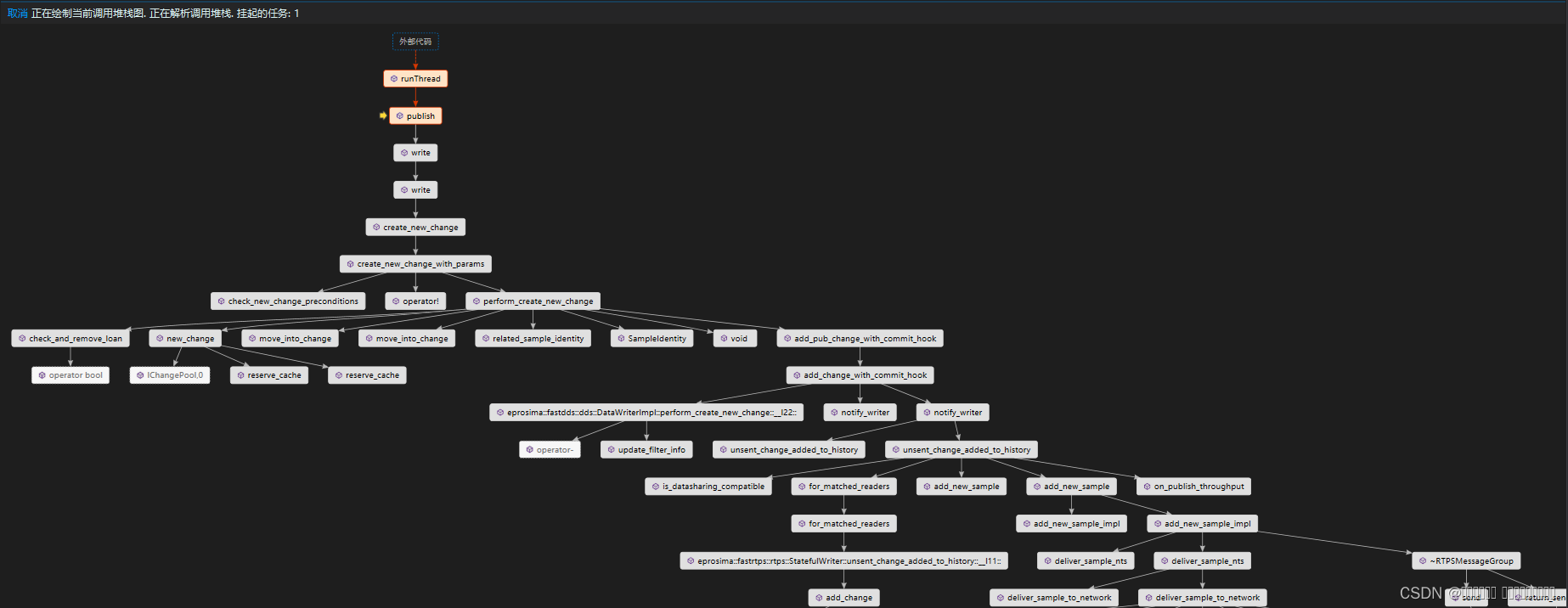
publish
-
mogo::shutdown
bool shutdown(){returnrclcpp::shutdown();}
相关文章:
ROS2底层机制源码分析
init ->init_and_remove_ros_arguments ->init ->Context::init 保存初始化传入的信号 ->install_signal_handlers→SignalHandler::install 开线程响应信号 ->_remove_ros_arguments 移除ros参数 ->SingleNodeManager::instance().…...

超越 Transformer开启高效开放语言模型的新篇章
在人工智能快速发展的今天,对于高效且性能卓越的语言模型的追求,促使谷歌DeepMind团队开发出了RecurrentGemma这一突破性模型。这款新型模型在论文《RecurrentGemma:超越Transformers的高效开放语言模型》中得到了详细介绍,它通过…...
快速排序-Hoare 递归版 C语言
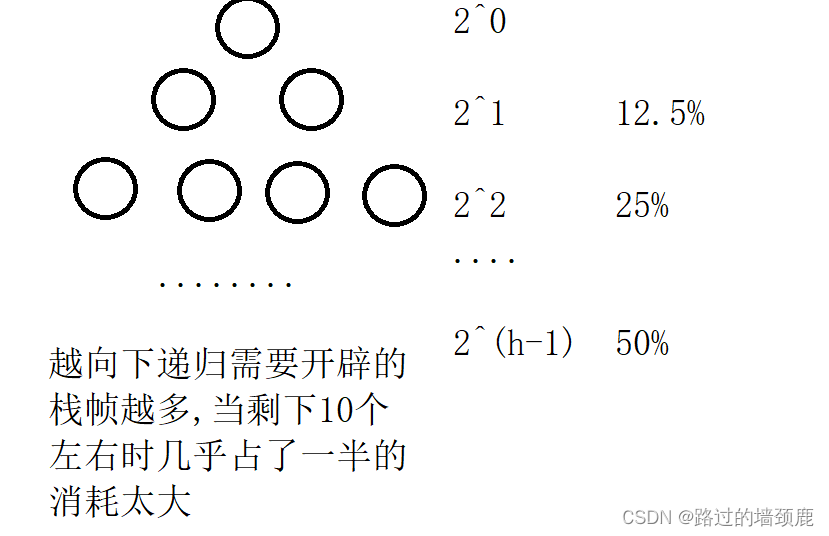
个人主页点这里~ 快速排序的简介: 快速排序是Hoare于1962年提出的一种 二叉树结构 的 交换 排序方法,其基本思想为:任取待排序元素序列中 的某元素作为 基准值 ,按照该排序码将待排序集合分割成 两子序列 , 左子序列中所有元素均 …...
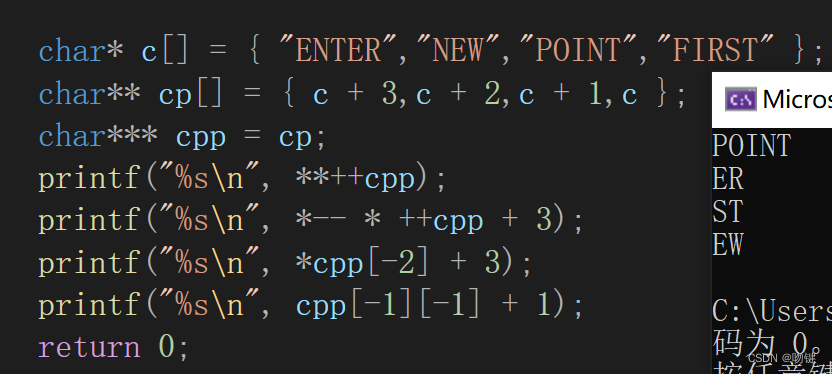
C语言经典指针运算笔试题图文解析
指针运算常常出现在面试题中,画图解决是最好的办法。 题目1: #include <stdio.h> int main() {int a[5] { 1, 2, 3, 4, 5 };int* ptr (int*)(&a 1);printf("%d,%d", *(a 1), *(ptr - 1));return 0; } //程序的结果是什么&…...

使用 KubeKey v3.1.1 离线部署原生 Kubernetes v1.28.8 实战
今天,我将为大家实战演示,如何基于操作系统 openEuler 22.03 LTS SP3,利用 KubeKey 制作 Kubernetes 离线安装包,并实战离线部署 Kubernetes v1.28.8 集群。 实战服务器配置 (架构 1:1 复刻小规模生产环境,配置略有不…...

DOS 命令
Dos: Disk Operating System 磁盘操作系统, 简单说一下 windows 的目录结构。 ..\ 到上一级目录 常用的dos 命令: 查看当前目录是有什么内容 dir dir d:\abc2\test200切换到其他盘下:盘符号 cd : change directory 案例演示:切换…...

如何用Java程序实现一个简单的消息队列?
在Java程序中,可以使用内置的java.util.concurrent.BlockingQueue作为消息队列存放的容器,来实现一个简单的消息队列。 具体实现如下,在这个例子中,我们创建了一个生产者线程和一个消费者线程,他们共享同一个阻塞队列…...

OpenAI 宕机事件:GPT 停摆的影响与应对
引言 2024年6月4日,OpenAI 的 GPT 模型发生了一次全球性的宕机,持续时间长达8小时。此次宕机不仅影响了OpenAI自家的服务,还导致大量用户涌向竞争对手平台,如Claude和Gemini,结果也导致这些平台出现故障。这次事件的广…...

linux常用的基础命令
ls - 列出目录内容。 cd - 更改目录。 pwd - 打印当前工作目录。 mkdir - 创建新目录。 rmdir - 删除空目录。 touch - 创建新文件或更新现有文件的时间戳。 cp - 复制文件或目录。 mv - 移动或重命名文件或目录。 rm - 删除文件或目录。 cat - 显示文件内容。 more - 分页显示…...
618家用智能投影仪推荐:这个高性价比品牌不容错过
随着科技的不断进步,家庭影院的概念已经从传统的大屏幕电视逐渐转向了更为灵活和便携的家用智能投影仪。随着618电商大促的到来,想要购买投影仪的用户们也开始摩拳擦掌了。本文将从投影仪的基础知识入手,为您推荐几款性价比很高的投影仪&…...

自愿离婚协议书
自愿离婚协议书 男方(夫): 女方(妻): 双方现因 原因,导致夫妻情感已破裂,自愿离婚…...

WPS JSA 宏脚本入门和样例
1入门 WPS window版本才支持JSA宏的功能。 可以自动化的操作文档中的一些内容。 参考文档: WPS API 参考文档:https://open.wps.cn/previous/docs/client/wpsLoad 微软的Word API文档:Microsoft.Office.Interop.Word 命名空间 | Microsoft …...
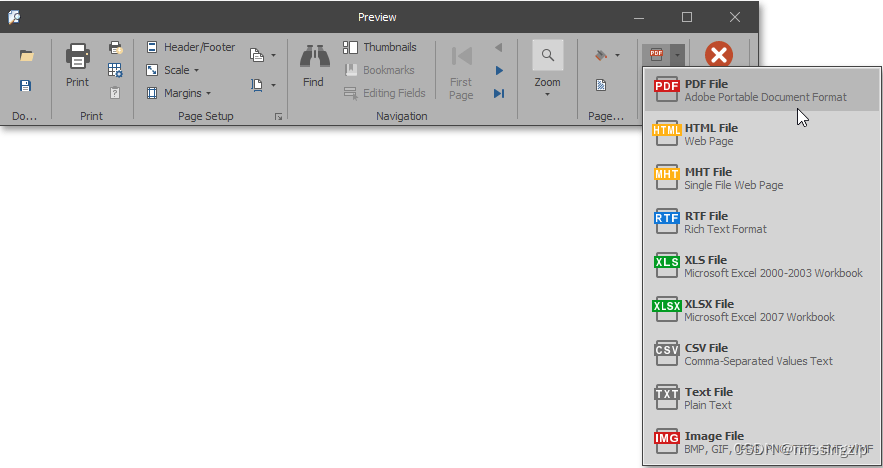
Printing and Exporting
打印 大多数DevExpress。NET控件(XtraGrid、XtraPivotGrid、XttraTreeList、XtraScheduler、XtraCharts)提供打印和导出功能。 所有可打印的DevExpress.NET控件是使用XtraPrinting库提供的方法打印的。 若要确定预览和打印选项是否可用,请检…...
c++【入门】正多边形每个内角的度数
限制 时间限制 : 1 秒 内存限制 : 128 MB 题目 根据多边形内角和定理,正多边形内角和等于:(n - 2)180(n大于等于3且n为整数)(如下图所示是三角形、四边形、五边形、六边形的形状)…...

spring boot3登录开发-邮箱登录/注册接口实现
⛰️个人主页: 蒾酒 🔥系列专栏:《spring boot实战》 🌊山高路远,行路漫漫,终有归途 目录 写在前面 上文衔接 内容简介 功能分析 所需依赖 邮箱验证登录/注册实现 1.创建交互对象 2.登录注册业务逻辑实…...

数据结构-二叉搜索树
二叉搜索树:BST(Binary Search Tree) 二叉搜索树是二叉树,可以为空,如果不为空,满足以下性质: 非空左子树的所有键值小于其根节点的键值非空右子树的所有键值大于其根节点的键值左、右字数本身也都是二叉搜索树 二叉…...

JUnit:Java开发者不可或缺的单元测试框架
在软件开发过程中,测试是确保代码质量的关键环节。单元测试作为测试体系的基础,对提升代码质量、降低bug率、增强软件稳定性具有重要作用。JUnit 作为 Java 语言事实上的标准单元测试框架,已经成为 Java 开发者进行单元测试的首选工具。本文将…...

NG32单片机GPIO口配置方式
目录 一、引言 二、GPIO口基本结构 三、GPIO口配置方式 四、工作原理 五、总结 一、引言 NG32单片机是一款集成度高、功能强大的微控制器。其中,GPIO(General Purpose Input/Output)口作为单片机与外部设备通信的重要接口,具…...
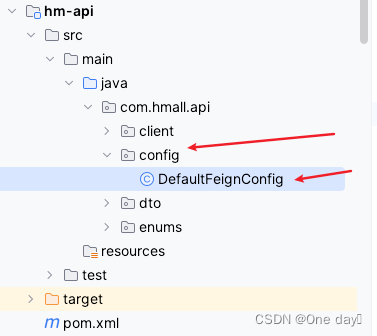
SpringCloud-OpenFeign拓展-连接池、最佳使用方法、日志输出
目录 1 OpenFeign连接池 1.1 常见连接类型 1.2 连接池使用方法 1.2.1 引入依赖 1.2.2 开启连接池功能 1.2.3 配置完成,重启实例即可,底层将更改设置。 2 OpenFeign最佳使用方法 2.1 每个微服务都是单独的project,内部有三个独立模块 …...

跨链协议中Cosmos IBC、Polkadot/XCM、Celer Network的区别以及用途
跨链协议是实现不同区块链之间通信和价值转移的关键技术。Cosmos IBC、Polkadot/XCM 和 Celer Network 是三个在跨链领域内具有代表性的协议,它们各自有着独特的设计理念和应用场景。下面是这三个协议的详细对比: Cosmos IBC (Inter-Blockchain Communi…...

10分钟学会Appium:移动端自动化测试的终极指南
10分钟学会Appium:移动端自动化测试的终极指南 【免费下载链接】til :memo: Today I Learned 项目地址: https://gitcode.com/gh_mirrors/ti/til Appium是一款功能强大的开源移动端自动化测试工具,支持iOS和Android平台,让开发者和测试…...
)
别再照搬Zynq教程了!手把手教你为Arty A7-35T配置MicroBlaze的SPI Flash启动(附时钟连接避坑指南)
别再照搬Zynq教程了!手把手教你为Arty A7-35T配置MicroBlaze的SPI Flash启动(附时钟连接避坑指南) 在FPGA开发领域,Zynq系列因其ARMFPGA的异构架构而广受欢迎,网上教程资源也最为丰富。但这也导致了一个常见陷阱——许…...

华为eNSP Cloud网卡异常排查指南:从WinPcap兼容性到虚拟网卡同步
1. 华为eNSP Cloud网卡异常排查指南 最近在帮朋友调试华为eNSP Cloud时遇到了网卡异常的问题,折腾了大半天才解决。这个问题其实挺常见的,特别是对于刚接触eNSP Cloud的新手来说。今天我就把完整的排查流程和解决方法分享给大家,希望能帮到遇…...

企业AI转型的底层逻辑与路径选择
文章核心内容围绕企业如何实现AI原生转型展开。首先,强调AI转型重点在于如何实现“AI原生”,而非简单叠加AI功能。其次,提出AI产品应超越对话框,实现隐形化与自动化,并成为记录系统。再次,建议企业技术路径…...
Vit工程化应用(transformers 库)
pip install transformersfrom transformers import ViTImageProcessor, ViTForImageClassification from PIL import Image import requests# 1. 加载模型和特征提取器 model_name google/vit-base-patch16-224 processor ViTImageProcessor.from_pretrained(model_name) mo…...

三步解决Zotero中文文献管理难题:茉莉花插件完整指南
三步解决Zotero中文文献管理难题:茉莉花插件完整指南 【免费下载链接】jasminum A Zotero add-on to retrive CNKI meta data. 一个简单的Zotero 插件,用于识别中文元数据 项目地址: https://gitcode.com/gh_mirrors/ja/jasminum 你是否在使用Zot…...

Ruby开发者指南:使用chatgpt-ruby轻量级封装集成OpenAI API
1. 项目概述:一个为Ruby开发者打造的OpenAI API轻量级封装 如果你是一名Ruby开发者,正琢磨着如何在自己的Rails应用、Sinatra服务或者一个简单的CLI工具里,优雅地集成ChatGPT的能力,那么 chatgpt-ruby 这个Gem很可能就是你正在…...

C8051F系列MCU Flash存储操作与优化实践
1. C8051F系列MCU Flash存储操作核心解析在嵌入式系统开发中,Flash存储器的可靠操作是每个工程师必须掌握的技能。不同于RAM的随意读写,Flash存储有其独特的物理特性和操作约束。以Silicon Labs的C8051F系列微控制器为例,其内部Flash存储器采…...

基于eBPF的系统调用监控:原理、部署与性能调优实战
1. 项目概述:一个“无人值守”的系统调用监控器最近在折腾系统性能分析和安全监控,发现了一个挺有意思的开源项目:syscalldev/nohuman。这个名字直译过来是“无人”,听起来有点神秘,但其实它的核心功能非常直接——一个…...

基于Vue 3与Express的私有化ChatGPT Web客户端部署指南
1. 项目概述与核心价值最近在折腾一个自用的AI对话工具,核心需求很简单:想在一个自己完全掌控的界面上,方便地使用大语言模型,比如ChatGPT的API。市面上虽然有很多现成的网页应用,但要么功能太臃肿,要么部署…...