零基础入门学用Arduino 第二部分(二)
重要的内容写在前面:
- 该系列是以up主太极创客的零基础入门学用Arduino教程为基础制作的学习笔记。
- 个人把这个教程学完之后,整体感觉是很好的,如果有条件的可以先学习一些相关课程,学起来会更加轻松,相关课程有数字电路(强烈推荐先学数电,不然可能会有一些地方理解起来很困难)、模拟电路等,然后就是C++(注意C++是必学的)。
- 文章中的代码都是跟着老师边学边敲的,不过比起老师的版本我还把注释写得详细了些,并且个人认为重要的地方都有详细的分析。
- 一些函数的介绍有参考太极创客官网给出的中文翻译,为了便于现查现用,把个人认为重要的部分粘贴了过来并做了一些修改。
- 如有错漏欢迎指正。
视频链接:2-1 MeArm项目概述_哔哩哔哩_bilibili
太极创客官网:太极创客 – Arduino, ESP8266物联网的应用、开发和学习资料
四、开发机械臂程序
1、准备工作
(1)电路部分按下图所示连接即可。
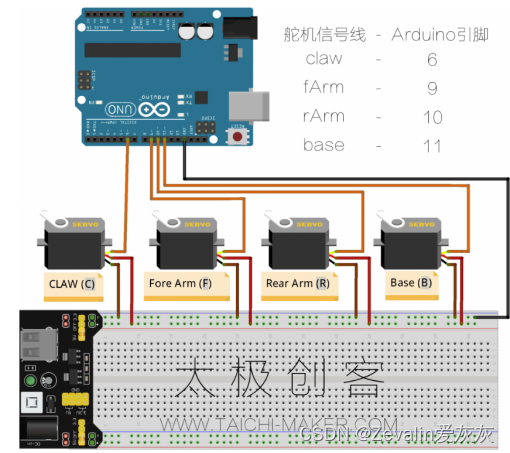
(2)连接完成后将下面的初始化调整程序下载到开发板中,让舵机转轴转到规定的初始位置。
#include <Servo.h> Servo base, rArm, fArm, claw ; //建立4个舵机对象void setup()
{ base.attach(11); // base 伺服舵机连接引脚11 舵机代号'b'rArm.attach(10); // rArm 伺服舵机连接引脚10 舵机代号'r'fArm.attach(9); // fArm 伺服舵机连接引脚9 舵机代号'f'claw.attach(6); // claw 伺服舵机连接引脚6 舵机代号'c'Serial.begin(9600);
}
void loop()
{ base.write(90); // 将base(底盘)舵机设置为初始位置delay(100);rArm.write(90); // 将rArm(后臂)舵机设置为初始位置delay(100);fArm.write(90); // 将fArm(前臂)舵机设置为初始位置delay(100);claw.write(90); // 将claw(钳子)舵机设置为初始位置delay(3000);
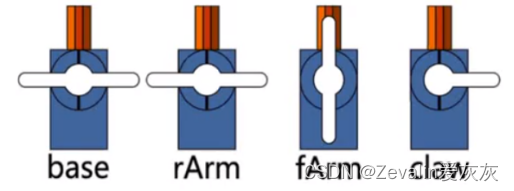
} (3)将4个MeArm舵机摇臂按以下示意图装配到舵机上。在MeArm机械臂安装过程中不要让调整好的舵机摇臂转动,如不小心转动了已经调整好的舵机摇臂,需要将摇臂恢复图示状态或使用MeArm舵机初始化调整程序再次对舵机进行初始化调整。
(4)根据图纸或说明书或视频教程安装机械臂,安装完毕后查看电路连接是否出现问题(比如正负极短接、舵机引线接错、舵机未与Arduino共地等问题),然后再运行调试程序,看看机械臂会不会产生异动或者异响,及时调整舵机摇臂的位置或者更换有问题的舵机。

2、通过串口控制机械臂(一步到位)
(1)连接完成后将下面的程序下载到开发板中。
①全局变量及包含的头文件:
#include <Servo.h> //使用servo库
Servo base, fArm, rArm, claw ; //创建4个servo对象
//建立4个int型变量存储当前电机角度值,初始角度值为设备启动后初始状态所需要的电机角度数值
int basePos = 90;
int rArmPos = 90;
int fArmPos = 90;
int clawPos = 90;
//存储电机极限值(const指定该数值为常量,常量数值在程序运行中不能改变)
const int baseMIN = 0;
const int baseMAX = 180;
const int rArmMIN = 45;
const int rArmMAX = 180;
const int fArmMIN = 35;
const int fArmMAX = 120;
const int clawMIN = 25;
const int clawMAX = 100;
②初始化工作部分:
void setup()
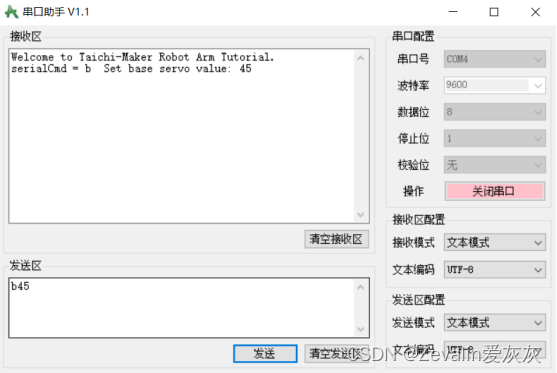
{base.attach(11); // base 伺服舵机连接引脚11 舵机代号'b'delay(200); // 稳定性等待rArm.attach(10); // rArm 伺服舵机连接引脚10 舵机代号'r'delay(200); // 稳定性等待fArm.attach(9); // fArm 伺服舵机连接引脚9 舵机代号'f'delay(200); // 稳定性等待claw.attach(6); // claw 伺服舵机连接引脚6 舵机代号'c'delay(200); // 稳定性等待Serial.begin(9600); Serial.println("Welcome to Taichi-Maker Robot Arm Tutorial.");
}③循环工作部分:
void loop()
{//使用串口监视器输入电机指令控制机械臂电机if (Serial.available() > 0) { //指令举例: b45,将底盘舵机调整到45度位置char serialCmd = Serial.read(); //获取串口接收缓存中的一个字符armDataCmd(serialCmd); //更改所记录的“当前舵机角度”}//根据记录的当前舵机角度进行设置base.write(basePos);delay(10);fArm.write(fArmPos); delay(10);rArm.write(rArmPos); delay(10);claw.write(clawPos); delay(10);
}④更改所记录的“当前舵机角度”:
void armDataCmd(char serialCmd)
{Serial.print("serialCmd = ");Serial.print(serialCmd); int servoData = Serial.parseInt(); //获取串口接收缓存中的整数数据作为角度值switch(serialCmd) //根据命令的第一个字符判断需要控制哪个舵机{case 'b': if(servoData > baseMAX) servoData = baseMAX; //判断是否越上界if(servoData < baseMIN) servoData = baseMIN; //判断是否越下界basePos = servoData; //更改当前舵机角度Serial.print(" Set base servo value: ");Serial.println(servoData);break;case 'c': if(servoData > clawMAX) servoData = clawMAX; //判断是否越上界if(servoData < clawMIN) servoData = clawMIN; //判断是否越下界clawPos = servoData; //更改当前舵机角度Serial.print(" Set claw servo value: ");Serial.println(servoData);break;case 'f': if(servoData > fArmMAX) servoData = fArmMAX; //判断是否越上界if(servoData < fArmMIN) servoData = fArmMIN; //判断是否越下界fArmPos = servoData; //更改当前舵机角度Serial.print(" Set fArm servo value: ");Serial.println(servoData);break;case 'r': if(servoData > rArmMAX) servoData = rArmMAX; //判断是否越上界if(servoData < rArmMIN) servoData = rArmMIN; //判断是否越下界rArmPos = servoData; //更改当前舵机角度Serial.print(" Set rArm servo value: ");Serial.println(servoData);break;case 'o': reportStatus();break;default:Serial.println(" Unknown Command.");}
}
void reportStatus()
{Serial.println("");Serial.println("");Serial.println("++++++ Robot-Arm Status Report +++++");Serial.print("Claw Position: clawPos = "); Serial.println(claw.read());Serial.print("Base Position: basePos = "); Serial.println(base.read());Serial.print("Rear Arm Position: rArmPos = "); Serial.println(rArm.read());Serial.print("Front Arm Position: fArmPos = "); Serial.println(fArm.read());Serial.println("++++++++++++++++++++++++++++++++++++");Serial.println("");
}(2)然后进行人工调试。
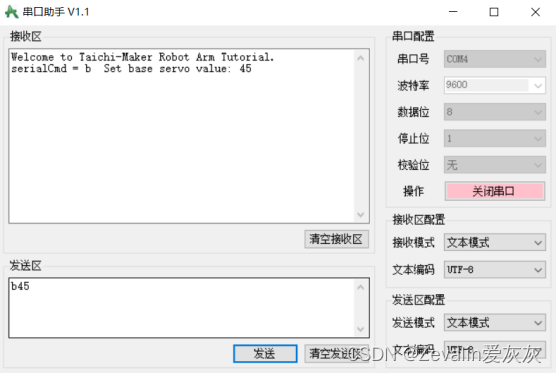
①通过串口助手向Arduino发送内容“b45”,机械臂的base舵机摇臂将立刻旋转至45°的位置,同理可调试其它3个舵机。
②通过串口助手向Arduino发送内容“b200”,由于200°超出base舵机的上界180°,机械臂的base舵机摇臂将立刻旋转至上界180°的位置,同理可调试其它3个舵机的上下界。(需要注意的是,上下界指的是机械臂舵机能达到的不损坏机械臂时的最大/小角度,这个角度可以对四个舵机分别进行调试而得出,每个机械臂的舵机旋转上下界可能略有差异,但只要每个舵机都经过正确的初始化调整,差异应该是很小的)

3、通过串口控制机械臂(有缓慢转动的过程)
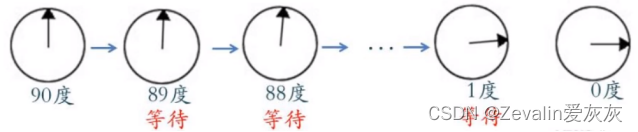
(1)在上例中,通过Arduino直接控制舵机旋转,会发现舵机摇臂旋转的速度非常快,然而现实中大多自动工作的机械臂都是缓慢转动的,如果每一个动作都是“一气呵成”,这将增加非常多不必要的麻烦与危险,为了让机械臂缓慢转动,可以将一次大幅度的转动分成若干次小幅度的转动完成,每次小幅度转动间隔一定的时间,这样即可实现机械臂的缓慢转动。
(2)连接完成后将下面的初始化调整程序下载到开发板中,然后进行人工调试。
①全局变量及包含的头文件:
#include <Servo.h> //使用servo库
Servo base, fArm, rArm, claw ; //创建4个servo对象
//建立4个int型变量存储当前电机角度值,初始角度值为设备启动后初始状态所需要的电机角度数值
int basePos = 90;
int rArmPos = 90;
int fArmPos = 90;
int clawPos = 90;
//存储电机极限值(const指定该数值为常量,常量数值在程序运行中不能改变)
const int baseMIN = 0;
const int baseMAX = 180;
const int rArmMIN = 45;
const int rArmMAX = 180;
const int fArmMIN = 35;
const int fArmMAX = 120;
const int clawMIN = 25;
const int clawMAX = 100;②初始化工作部分:
void setup()
{base.attach(11); //base 伺服舵机连接引脚11 舵机代号'b'delay(200); //稳定性等待rArm.attach(10); //rArm 伺服舵机连接引脚10 舵机代号'r'delay(200); //稳定性等待fArm.attach(9); //fArm 伺服舵机连接引脚9 舵机代号'f'delay(200); //稳定性等待claw.attach(6); //claw 伺服舵机连接引脚6 舵机代号'c'delay(200); //稳定性等待Serial.begin(9600); Serial.println("Welcome to Taichi-Maker Robot Arm Tutorial.");
}
③循环工作部分:
void loop()
{//使用串口监视器输入电机指令控制机械臂电机if (Serial.available() > 0) { //指令举例: b45,将底盘舵机调整到45度位置char serialCmd = Serial.read(); //获取串口接收缓存中的一个字符armDataCmd(serialCmd); //更改所记录的“当前舵机角度”}//根据记录的当前舵机角度进行设置base.write(basePos);delay(10);fArm.write(fArmPos); delay(10);rArm.write(rArmPos); delay(10);claw.write(clawPos); delay(10);
}④更改所记录的“当前舵机角度”:(reportStatus函数的实现沿用上例即可)
void armDataCmd(char serialCmd)
{Serial.print("serialCmd = ");Serial.print(serialCmd); int servoData = Serial.parseInt(); //获取串口接收缓存中的整数数据作为角度值int fromPos, toPos;switch(serialCmd) //根据命令的第一个字符判断需要控制哪个舵机{case 'b': fromPos = base.read(); //读取base舵机的当前角度值toPos = servoData; //命令中的角度值作为调整后角度值if(servoData > baseMAX) servoData = baseMAX; //判断是否越上界if(servoData < baseMIN) servoData = baseMIN; //判断是否越下界if (fromPos <= toPos) //如果“起始角度值”小于“目标角度值” ,每15ms向目标转动1°for (int i=fromPos; i<=toPos; i++){base.write(i);delay(15);}else //否则“起始角度值”大于“目标角度值”,每15ms向目标转动1°for (int i=fromPos; i>=toPos; i--){base.write(i);delay(15);}basePos = servoData;Serial.print(" Set base servo value: ");Serial.println(servoData);break;case 'c':fromPos = claw.read(); //读取claw舵机的当前角度值toPos = servoData; //命令中的角度值作为调整后角度值if(servoData > clawMAX) servoData = clawMAX; //判断是否越上界if(servoData < clawMIN) servoData = clawMIN; //判断是否越下界if (fromPos <= toPos) //如果“起始角度值”小于“目标角度值” ,每15ms向目标转动1°for (int i=fromPos; i<=toPos; i++){claw.write(i);delay(15);}else //否则“起始角度值”大于“目标角度值”,每15ms向目标转动1°for (int i=fromPos; i>=toPos; i--){claw.write(i);delay(15);}clawPos = servoData;Serial.print(" Set claw servo value: ");Serial.println(servoData);break; case 'f': fromPos = fArm.read(); //读取fArm舵机的当前角度值toPos = servoData; //命令中的角度值作为调整后角度值if(servoData > fArmMAX) servoData = fArmMAX; //判断是否越上界if(servoData < fArmMIN) servoData = fArmMIN; //判断是否越下界if (fromPos <= toPos) //如果“起始角度值”小于“目标角度值” ,每15ms向目标转动1°for (int i=fromPos; i<=toPos; i++){fArm.write(i);delay(15);}else //否则“起始角度值”大于“目标角度值”,每15ms向目标转动1°for (int i=fromPos; i>=toPos; i--){fArm.write(i);delay(15);}fArmPos = servoData;Serial.print(" Set fArm servo value: ");Serial.println(servoData);break;case 'r': fromPos = rArm.read(); //读取rArm舵机的当前角度值toPos = servoData; //命令中的角度值作为调整后角度值if(servoData > rArmMAX) servoData = rArmMAX; //判断是否越上界if(servoData < rArmMIN) servoData = rArmMIN; //判断是否越下界if (fromPos <= toPos) //如果“起始角度值”小于“目标角度值” ,每15ms向目标转动1°for (int i=fromPos; i<=toPos; i++){rArm.write(i);delay(15);}else //否则“起始角度值”大于“目标角度值”,每15ms向目标转动1°for (int i=fromPos; i>=toPos; i--){rArm.write(i);delay(15);}rArmPos = servoData;Serial.print(" Set rArm servo value: ");Serial.println(servoData);break;case 'o': reportStatus();break;default: Serial.println(" Unknown Command.");}
}(3)然后进行人工调试。
①通过串口助手向Arduino发送内容“b45”,机械臂的base舵机摇臂将缓慢地旋转至45°的位置,同理可调试其它3个舵机。
②通过串口助手向Arduino发送内容“b200”,由于200°超出base舵机的上界180°,机械臂的base舵机摇臂将缓慢地旋转至180°的位置,同理可调试其它3个舵机的上下界。(需要注意的是,每个机械臂的舵机旋转上下界可能略有差异,但只要每个舵机都经过正确的初始化调整,差异应该是很小的)

4、通过串口控制机械臂(有设置快捷指令)
(1)电路连接完成后将下面的程序下载到开发板中。
①全局变量及包含的头文件:
#include <Servo.h> //使用servo库
Servo base, fArm, rArm, claw ; //创建4个servo对象//存储电机极限值(const指定该数值为常量,常量数值在程序运行中不能改变)
const int baseMin = 0;
const int baseMax = 180;
const int rArmMin = 45;
const int rArmMax = 180;
const int fArmMin = 35;
const int fArmMax = 120;
const int clawMin = 25;
const int clawMax = 100;int DSD = 15; //Default Servo Delay (默认电机运动延迟时间)
//此变量用于控制电机运行速度,增大此变量数值将降低电机运行速度,从而控制机械臂动作速度②初始化工作部分:
void setup()
{base.attach(11); //base 伺服舵机连接引脚11 舵机代号'b'delay(200); //稳定性等待rArm.attach(10); //rArm 伺服舵机连接引脚10 舵机代号'r'delay(200); //稳定性等待fArm.attach(9); //fArm 伺服舵机连接引脚9 舵机代号'f'delay(200); //稳定性等待claw.attach(6); //claw 伺服舵机连接引脚6 舵机代号'c'delay(200); //稳定性等待base.write(90); delay(10); //base 伺服舵机旋转角度初始化+稳定性等待fArm.write(90); delay(10); //fArm 伺服舵机旋转角度初始化+稳定性等待rArm.write(90); delay(10); //rArm 伺服舵机旋转角度初始化+稳定性等待claw.write(90); delay(10); //claw 伺服舵机旋转角度初始化+稳定性等待Serial.begin(9600); Serial.println("Welcome to Taichi-Maker Robot Arm Tutorial");
}
③循环工作部分:
void loop()
{if (Serial.available() > 0) { char serialCmd = Serial.read(); //获取指令中的第一个字符armDataCmd(serialCmd); //根据串行指令执行相应操作}
}void armDataCmd(char serialCmd)
{if (serialCmd == 'b' || serialCmd == 'c' || serialCmd == 'f' || serialCmd == 'r') //如果第一个字符是舵机代号{int servoData = Serial.parseInt(); //获取指令中的整数数据servoCmd(serialCmd, servoData, DSD); //调用机械臂舵机运行函数(参数:舵机名,目标角度,单次延迟时间)} else {switch(serialCmd){ case 'o': //输出舵机状态信息reportStatus();break;case 'i': //机械臂初始化armIniPos();break; default: //未知指令反馈Serial.println("Unknown Command.");}}
}④机械臂舵机运行函数:
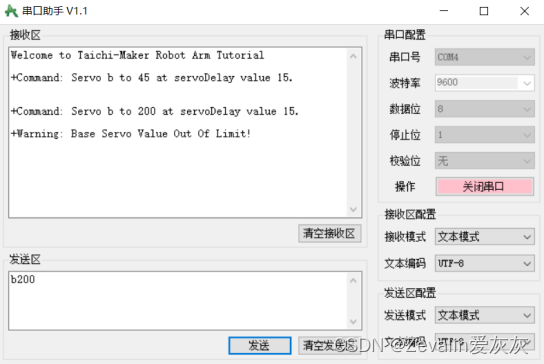
void servoCmd(char servoName, int toPos, int servoDelay)
{ Servo servo2go; //创建servo对象//串口监视器输出接收指令信息Serial.println("");Serial.print("+Command: Servo ");Serial.print(servoName);Serial.print(" to ");Serial.print(toPos);Serial.print(" at servoDelay value ");Serial.print(servoDelay);Serial.println(".");Serial.println(""); int fromPos; //建立变量,存储电机起始运动角度值switch(servoName) //根据命令的第一个字符判断需要控制哪个舵机{case 'b':if(toPos >= baseMin && toPos <= baseMax){ //判断是否越界,越界就报错servo2go = base; //把对象base拷贝到servo2gofromPos = base.read(); //获取当前base电机角度值用于“电机运动起始角度值”break;} else {Serial.println("+Warning: Base Servo Value Out Of Limit!");return;}case 'c':if(toPos >= clawMin && toPos <= clawMax){ //判断是否越界,越界就报错servo2go = claw; //把对象claw拷贝到servo2gofromPos = claw.read(); //获取当前claw电机角度值用于“电机运动起始角度值”break;} else {Serial.println("+Warning: Claw Servo Value Out Of Limit!");return;}case 'f':if(toPos >= fArmMin && toPos <= fArmMax){ //判断是否越界,越界就报错servo2go = fArm; //把对象fArm拷贝到servo2gofromPos = fArm.read(); //获取当前fArm电机角度值用于“电机运动起始角度值”break;} else {Serial.println("+Warning: fArm Servo Value Out Of Limit!");return;}case 'r':if(toPos >= rArmMin && toPos <= rArmMax){ //判断是否越界,越界就报错servo2go = rArm; //把对象rArm拷贝到servo2gofromPos = rArm.read(); //获取当前rArm电机角度值用于“电机运动起始角度值”break;} else {Serial.println("+Warning: rArm Servo Value Out Of Limit!");return;} }//通过对象servo2go指挥电机运行if (fromPos <= toPos) //如果“起始角度值”小于“目标角度值”for (int i=fromPos; i<=toPos; i++){servo2go.write(i);delay(servoDelay);}else //否则“起始角度值”大于“目标角度值”for (int i=fromPos; i>=toPos; i--){servo2go.write(i);delay(servoDelay);}
}⑤报告舵机当前角度函数:
void reportStatus()
{Serial.println("");Serial.println("");Serial.println("+ Robot-Arm Status Report +");Serial.print("Claw Position: "); Serial.println(claw.read());Serial.print("Base Position: "); Serial.println(base.read());Serial.print("Rear Arm Position:"); Serial.println(rArm.read());Serial.print("Front Arm Position:"); Serial.println(fArm.read());Serial.println("++++++++++++++++++++++++++");Serial.println("");
}⑥机械臂重新初始化函数:
void armIniPos()
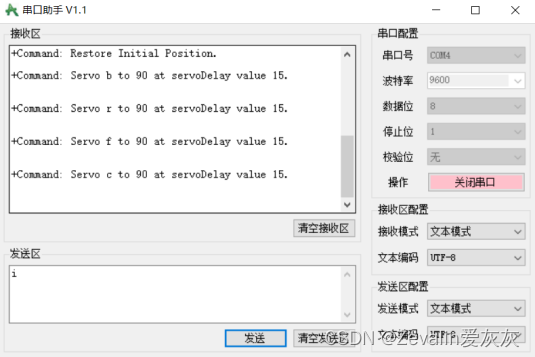
{Serial.println("+Command: Restore Initial Position.");int robotIniPosArray[4][3] = //使用二维数组存储4个舵机的初始化信息{/* 舵机代号 目标角度 单次延迟 */{ 'b', 90, DSD},{ 'r', 90, DSD},{ 'f', 90, DSD},{ 'c', 90, DSD} }; for (int i = 0; i < 4; i++) //调用4次机械臂舵机运行函数,分别初始化4个舵机{servoCmd(robotIniPosArray[i][0], robotIniPosArray[i][1], robotIniPosArray[i][2]);}
}(2)然后进行人工调试。
①通过串口助手向Arduino发送内容“b45”,机械臂的base舵机摇臂将缓慢地旋转至45°的位置,同理可调试其它3个舵机。

②通过串口助手向Arduino发送内容“b200”,由于200°超出base舵机的上界180°,机械臂的base舵机不会有任何动作,同时Arduino通过串口报指令有误,同理可调试其它3个舵机。
③通过串口助手向Arduino发送内容“o”,Arduino将通过串口发送四个舵机当前的状态。

④通过串口助手向Arduino发送内容“i”,Arduino将控制四个舵机恢复初始状态。
5、通过串口控制机械臂(设有手柄控制方式)
(1)电路连接完成后将下面的程序下载到开发板中。
①全局变量及包含的头文件:
#include <Servo.h> //使用servo库
Servo base, fArm, rArm, claw ; //创建4个servo对象//存储电机极限值(const指定该数值为常量,常量数值在程序运行中不能改变)
const int baseMin = 0;
const int baseMax = 180;
const int rArmMin = 45;
const int rArmMax = 180;
const int fArmMin = 35;
const int fArmMax = 120;
const int clawMin = 25;
const int clawMax = 100;int DSD = 15; //Default Servo Delay (默认电机运动延迟时间)
//此变量用于控制电机运行速度,增大此变量数值将降低电机运行速度,从而控制机械臂动作速度bool mode; //记录当前的模式:mode = 1 —— 指令模式,mode = 0 —— 手柄模式
int moveStep = 3; //每一次按下手柄按键的舵机移动量(仅适用于手柄模式)②初始化工作部分:
void setup()
{base.attach(11); //base 伺服舵机连接引脚11 舵机代号'b'delay(200); //稳定性等待rArm.attach(10); //rArm 伺服舵机连接引脚10 舵机代号'r'delay(200); //稳定性等待fArm.attach(9); //fArm 伺服舵机连接引脚9 舵机代号'f'delay(200); //稳定性等待claw.attach(6); //claw 伺服舵机连接引脚6 舵机代号'c'delay(200); //稳定性等待base.write(90); delay(10); //base 伺服舵机旋转角度初始化+稳定性等待fArm.write(90); delay(10); //fArm 伺服舵机旋转角度初始化+稳定性等待rArm.write(90); delay(10); //rArm 伺服舵机旋转角度初始化+稳定性等待claw.write(90); delay(10); //claw 伺服舵机旋转角度初始化+稳定性等待Serial.begin(9600); Serial.println("Welcome to Taichi-Maker Robot Arm Tutorial");
}③循环工作部分:
void loop()
{if (Serial.available()>0) { char serialCmd = Serial.read(); //获取指令中的第一个字符if(mode == 1) //根据mode判断现在处于什么模式{armDataCmd(serialCmd); //指令模式} else {armJoyCmd(serialCmd); //手柄模式}}
}④指令模式下的处理逻辑:
void armDataCmd(char serialCmd)
{//判断用户是否因搞错模式而输入错误的指令信息(即指令模式下输入手柄按键信息)if ( serialCmd == 'w' || serialCmd == 's' || serialCmd == 'a' || serialCmd == 'd'|| serialCmd == '5' || serialCmd == '4' || serialCmd == '6' || serialCmd == '8' ){Serial.println("+Warning: Robot in Instruction Mode..."); delay(100);while(Serial.available() > 0) char wrongCommand = Serial.read(); //清除串口缓存中的错误指令return;} if (serialCmd == 'b' || serialCmd == 'c' || serialCmd == 'f' || serialCmd == 'r'){int servoData = Serial.parseInt();servoCmd(serialCmd, servoData, DSD); //调用机械臂舵机运行函数(参数:舵机名,目标角度,单次延迟)} elseswitch(serialCmd){ case 'm': //切换至手柄模式 mode = 0; Serial.println("Command: Switch to Joy-Stick Mode.");break;case 'o': //输出舵机状态信息reportStatus();break;case 'i': //机械臂初始化armIniPos();break; default: //未知指令反馈Serial.println("Unknown Command.");}
}⑤手柄模式下的处理逻辑:
void armJoyCmd(char serialCmd)
{//判断用户是否因搞错模式而输入错误的指令信息(即手柄模式下输入舵机指令)if (serialCmd == 'b' || serialCmd == 'c' || serialCmd == 'f' || serialCmd == 'r'){Serial.println("+Warning: Robot in Joy-Stick Mode...");delay(100);while(Serial.available()>0) char wrongCommand = Serial.read(); //清除串口缓存中的错误指令return;} int baseJoyPos, rArmJoyPos, fArmJoyPos, clawJoyPos;switch(serialCmd){case 'a': //Base向左Serial.println("Received Command: Base Turn Left"); baseJoyPos = base.read() - moveStep; //目标角度=当前角度-单次操作移动角度servoCmd('b', baseJoyPos, DSD);break; //调用机械臂舵机运行函数 case 'd': //Base向右Serial.println("Received Command: Base Turn Right"); baseJoyPos = base.read() + moveStep; //目标角度=当前角度+单次操作移动角度servoCmd('b', baseJoyPos, DSD);break; //调用机械臂舵机运行函数 case 's': //rArm向下Serial.println("Received Command: Rear Arm Down"); rArmJoyPos = rArm.read() + moveStep; //目标角度=当前角度+单次操作移动角度servoCmd('r', rArmJoyPos, DSD);break; //调用机械臂舵机运行函数 case 'w': //rArm向上Serial.println("Received Command: Rear Arm Up"); rArmJoyPos = rArm.read() - moveStep; //目标角度=当前角度-单次操作移动角度servoCmd('r', rArmJoyPos, DSD);break; //调用机械臂舵机运行函数 case '8': //fArm向上Serial.println("Received Command: Front Arm Up"); fArmJoyPos = fArm.read() + moveStep; //目标角度=当前角度+单次操作移动角度servoCmd('f', fArmJoyPos, DSD);break; //调用机械臂舵机运行函数 case '5': //fArm向下Serial.println("Received Command: Front Arm Down"); fArmJoyPos = fArm.read() - moveStep; //目标角度=当前角度-单次操作移动角度servoCmd('f', fArmJoyPos, DSD);break; //调用机械臂舵机运行函数 case '4': //Claw关闭Serial.println("Received Command: Claw Close Down"); clawJoyPos = claw.read() + moveStep; //目标角度=当前角度+单次操作移动角度servoCmd('c', clawJoyPos, DSD);break; //调用机械臂舵机运行函数 case '6': //Claw打开Serial.println("Received Command: Claw Open Up"); clawJoyPos = claw.read() - moveStep; //目标角度=当前角度-单次操作移动角度servoCmd('c', clawJoyPos, DSD);break; //调用机械臂舵机运行函数 case 'm': //切换至指令模式 mode = 1; Serial.println("Command: Switch to Instruction Mode.");break;case 'o': //输出舵机状态信息reportStatus();break;case 'i': //机械臂初始化armIniPos();break;default: //未知指令反馈Serial.println("Unknown Command.");return;}
}
⑥报告舵机当前角度函数:
void reportStatus()
{Serial.println("");Serial.println("");Serial.println("+ Robot-Arm Status Report +");Serial.print("Claw Position: "); Serial.println(claw.read());Serial.print("Base Position: "); Serial.println(base.read());Serial.print("Rear Arm Position:"); Serial.println(rArm.read());Serial.print("Front Arm Position:"); Serial.println(fArm.read());Serial.println("++++++++++++++++++++++++++");Serial.println("");
}⑦机械臂重新初始化函数:
void armIniPos()
{Serial.println("+Command: Restore Initial Position.");int robotIniPosArray[4][3] = //使用二维数组存储4个舵机的初始化信息{/* 舵机代号 目标角度 单次延迟 */{ 'b', 90, DSD},{ 'r', 90, DSD},{ 'f', 90, DSD},{ 'c', 90, DSD} }; for (int i = 0; i < 4; i++) //调用4次机械臂舵机运行函数,分别初始化4个舵机{servoCmd(robotIniPosArray[i][0], robotIniPosArray[i][1], robotIniPosArray[i][2]);}
}⑧机械臂舵机运行函数:
void servoCmd(char servoName, int toPos, int servoDelay)
{ Servo servo2go; //创建servo对象//串口监视器输出接收指令信息Serial.println("");Serial.print("+Command: Servo ");Serial.print(servoName);Serial.print(" to ");Serial.print(toPos);Serial.print(" at servoDelay value ");Serial.print(servoDelay);Serial.println(".");Serial.println(""); int fromPos; //建立变量,存储电机起始运动角度值switch(servoName){case 'b':if(toPos >= baseMin && toPos <= baseMax){ //判断是否越界,越界就报错servo2go = base; //把对象base拷贝到servo2gofromPos = base.read(); //获取当前base电机角度值用于“电机运动起始角度值”break;} else {Serial.println("+Warning: Base Servo Value Out Of Limit!");return;}case 'c':if(toPos >= clawMin && toPos <= clawMax){ //判断是否越界,越界就报错servo2go = claw; //把对象claw拷贝到servo2gofromPos = claw.read(); //获取当前claw电机角度值用于“电机运动起始角度值”break;} else {Serial.println("+Warning: Claw Servo Value Out Of Limit!");return;}case 'f':if(toPos >= fArmMin && toPos <= fArmMax){ //判断是否越界,越界就报错servo2go = fArm; //把对象fArm拷贝到servo2gofromPos = fArm.read(); //获取当前fArm电机角度值用于“电机运动起始角度值”break;} else {Serial.println("+Warning: fArm Servo Value Out Of Limit!");return;}case 'r':if(toPos >= rArmMin && toPos <= rArmMax){ //判断是否越界,越界就报错servo2go = rArm; //把对象rArm拷贝到servo2gofromPos = rArm.read(); //获取当前rArm电机角度值用于“电机运动起始角度值”break;} else {Serial.println("+Warning: rArm Servo Value Out Of Limit!");return;} }//通过对象servo2go指挥电机运行if (fromPos <= toPos) //如果“起始角度值”小于“目标角度值”for (int i=fromPos; i<=toPos; i++){servo2go.write(i);delay(servoDelay);}else //否则“起始角度值”大于“目标角度值”for (int i=fromPos; i>=toPos; i--){servo2go.write(i);delay(servoDelay);}
}(2)根据程序注释进行人工调试。
6、配合HC-06蓝牙模块控制机械臂
(1)按照下图所示将电路连接好。
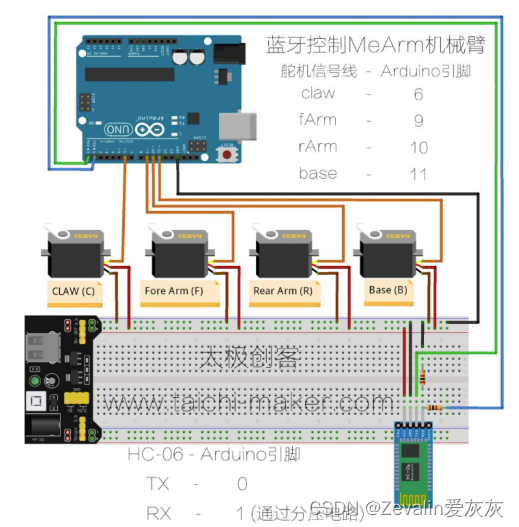
(2)沿用上例的程序即可,手机连接上HC-06蓝牙模块,接着打开配套软件的手柄操作界面,设置好每个键所对应的指令信息,在机械臂处于手柄操作模式的前提下对其进行调试。

相关文章:
零基础入门学用Arduino 第二部分(二)
重要的内容写在前面: 该系列是以up主太极创客的零基础入门学用Arduino教程为基础制作的学习笔记。个人把这个教程学完之后,整体感觉是很好的,如果有条件的可以先学习一些相关课程,学起来会更加轻松,相关课程有数字电路…...

旅游行业电商平台:数字化转型的引擎与未来发展趋势
引言 旅游行业数字化转型的背景和重要性 随着信息技术的飞速发展,数字化转型成为各行业发展的必然趋势。旅游行业,作为一个高度依赖信息和服务的领域,数字化转型尤为重要。通过数字化手段,旅游行业能够实现资源的高效配置、服务的…...
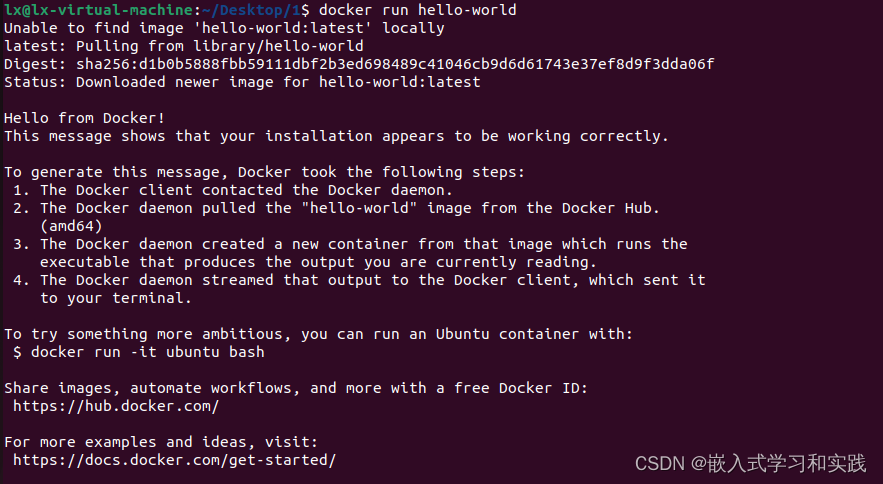
Ubuntu 22.04安装 docker
安装过程和指令 # 1.升级 apt sudo apt update # 2.安装docker sudo apt install docker.io docker-compose # 3.将当前用户加入 docker组 sudo usermod -aG docker ${USER} # 4. 重启 # 5. 查看镜像 docker ps -a 或者 docker images # 6. 下载镜像 docker pull hello-world …...

【Gitlab】访问默认PostgreSQL数据库
本地访问PostgreSQL gitlab有可以直接访问内部PostgreSQL的命令 sudo gitlab-rails dbconsole # 或者 sudo gitlab-psql -d gitlabhq_production效果截图 常用SQL # 查看用户状态 select id,name,email,state,last_sign_in_at,updated_at,last_credential_check_at,last_act…...

乐鑫ESP32-C3芯片应用,启明云端WT32C3-S5模组:简化产品硬件设计
在数字化浪潮的推动下,物联网(IoT)正迅速成为连接现实世界与数字世界的桥梁。芯片作为智能设备的心脏,其重要性不言而喻。 乐鑫推出的ESP32-C3芯片以其卓越的性能和丰富的功能,为智能物联网领域带来了新的活力,我将带您深入了解这…...
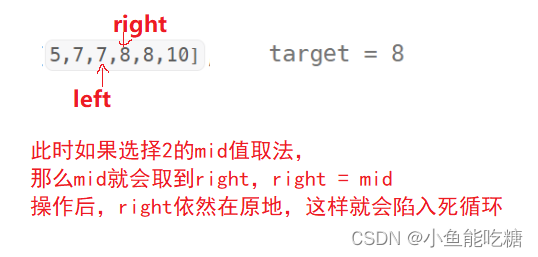
算法刷题【二分法】
题目: 注意题目中说明了数据时非递减的,那么这样就存在二分性,能够实现logn的复杂度。二分法每次只能取寻找特定的某一个值,所以我们要分别求左端点和有端点。 分析第一组用例得到结果如下: 成功找到左端点8 由此可知࿰…...
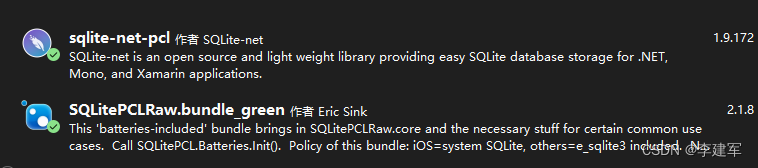
.NET MAUI Sqlite程序应用-数据库配置(一)
项目名称:Ownership(权籍信息采集) 一、安装 NuGet 包 安装 sqlite-net-pcl 安装 SQLitePCLRawEx.bundle_green 二、创建多个表及相关字段 Models\OwnershipItem.cs using SQLite;namespace Ownership.Models {public class fa_rural_base//基础数据…...
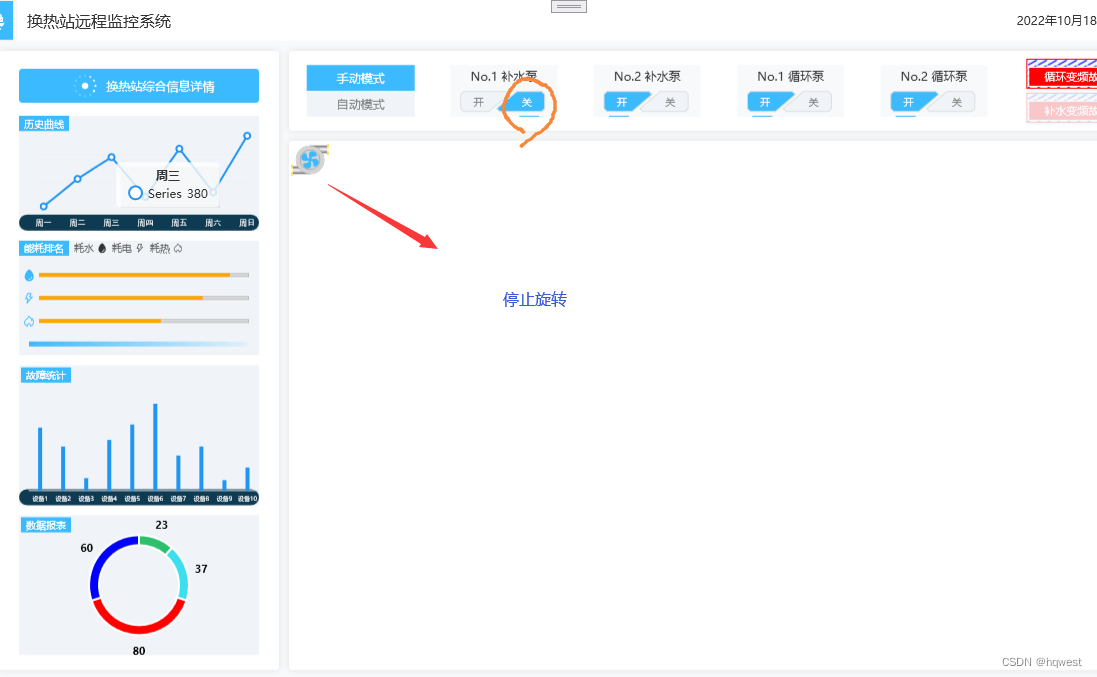
基于WPF技术的换热站智能监控系统09--封装水泵对象
1、添加用户控件 2、编写水泵UI 控件中用到了Viewbox控件,Viewbox控件是WPF中一个简单的缩放工具,它可以帮助你放大或缩小单个元素,同时保持其宽高比。通过样式和属性设置,你可以创建出既美观又功能丰富的用户界面。在实际开发中…...

GLM+vLLM 部署调用
GLMvLLM 部署调用 vLLM 简介 vLLM 框架是一个高效的大型语言模型(LLM)推理和部署服务系统,具备以下特性: 高效的内存管理:通过 PagedAttention 算法,vLLM 实现了对 KV 缓存的高效管理,减少了…...
leetcode 122 买卖股票的最佳时机||(动态规划解法)
题目分析 题目描述的已经十分清楚了,不做过多阐述 算法原理 状态表示 我们假设第i天的最大利润是dp[i] 我们来画一下状态机 有两个状态,买入后和卖出后,我们就可以使用两个dp表来解决问题 f[i]表示当天买入后的最大利润 g[i]表示当天卖出…...

C++设计模式---组合模式
1、介绍 组合模式(Composite)是一种结构型设计模式,也被称为部分-整体模式。它将复杂对象视为由多个简单对象(称为“组件”)组成的树形结构,这些组件能够共享相同的行为。每个组件都可能包含一个或多个子组…...
C/C++版本)
工厂方法模式(大话设计模式)C/C++版本
工厂方法模式 C 参考:https://www.cnblogs.com/Galesaur-wcy/p/15926711.html #include <iostream> #include <memory> using namespace std;// 运算类 class Operation { private:double _NumA;double _NumB;public:void SetNumA(){cout << &…...

[NCTF 2018]flask真香
打开题目后没有提示框,尝试扫描后也没有什么结果,猜想是ssti。所以尝试寻找ssti的注入点并判断模版。 模版判断方式: 在url地址中输入{7*7} 后发现不能识别执行。 尝试{{7*7}} ,执行成功,继续往下走注入{{7*7}},如果执…...

性能测试3【搬代码】
1.Linux服务器性能分析命令及详解 2.GarafanainfluxDB监控jmeter数据 3.GarafanaPrometheus监控服务器和数据库性能 4.性能瓶颈分析以及性能调优方案详解 一、无界面压测时, top load average:平均负载 htop 二、Garafana监控平台 传统项目:centosphpm…...

<tesseract><opencv><Python>基于python和opencv,使用ocr识别图片中的文本并进行替换
前言 本文是在python中,利用opencv处理图片,利用tesseractOCR来识别图片中的文本并进行替换的一种实现方法。 环境配置 系统:windows 平台:visual studio code 语言:python 库:pyqt5、opencv、tesseractOCR 代码介绍 本文程序功能实现,主要依赖于tesseractOCR这个库,…...

海南云亿商务咨询有限公司解锁抖音电商新纪元
在当今数字化浪潮中,抖音电商以其独特的魅力和强大的用户基础,迅速成为企业营销的新宠。海南云亿商务咨询有限公司,作为专注于抖音电商服务的领先企业,凭借专业的团队和丰富的经验,为众多企业提供了高效、精准的电商服…...
)
arm64架构 统信UOS搭建PXE无盘启动Linux系统(麒麟桌面为例)
arm64架构 统信UOS搭建PXE无盘启动Linux系统(麒麟桌面为例) 搞了好久搞得头疼哎 1、准备服务器UOS服务器 准备服务IP 这里是192.168.1.100 1.1、安装程序 yum install -y dhcp tftp tftp-server xinetd nfs-utils rpcbind 2、修改配置 2.1、修改dhcpd.c…...

SpringBoot 实现 阿里云语音通知(SingleCallByTts)
目录 一、准备工作1.开通 阿里云语音服务2.申请企业资质3.创建语音通知模板,审核通过4.调用API接口---SingleCallByTts5.调试API接口---SingleCallByTts 二、代码实现1.导入依赖 com.aliyun:aliyun-java-sdk-dyvmsapi:3.0.22.创建工具类,用于发送语音通知…...
IDEA 连接GitHub仓库并上传项目(同时解决SSH问题)
目录 1 确认自己电脑上已经安装好Git 2 添加GitHub账号 2.1 Setting -> 搜索GitHub-> ‘’ -> Log In with Token 2.2 点击Generate 去GitHub生成Token 2.3 勾选SSH后其他不变直接生成token 2.4 然后复制token添加登录账号即可 3 点击导航栏中VCS -> Create…...

vue/react/js 常用的原生获取当前页面的url网址的相关方法
目录 第一章 场景 第二章 总结 第一章 场景 最近实现需求时遇到这么一种情况: 本地url —— 线上url —— 需求:需要将token清除掉 注意事项:token不是#/后面的参数,说明并不是我们前端返回的,vue路由的方法使用不…...

Phi-3-mini-4k-instruct-gguf完整指南:模型原理、部署、调参、运维一体化
Phi-3-mini-4k-instruct-gguf完整指南:模型原理、部署、调参、运维一体化 1. 模型概述 Phi-3-mini-4k-instruct-gguf是微软Phi-3系列中的轻量级文本生成模型GGUF版本。这个模型特别适合处理问答、文本改写、摘要整理和简短创作等任务。相比完整版模型,…...

Qwen3-Embedding-4B GPU算力优化:CUDA Stream并发执行向量化与相似度计算,吞吐提升1.8倍
Qwen3-Embedding-4B GPU算力优化:CUDA Stream并发执行向量化与相似度计算,吞吐提升1.8倍 1. 引言:当语义搜索遇上性能瓶颈 想象一下,你正在使用一个智能语义搜索工具,输入“我想吃点东西”,它立刻为你找到…...
)
从CPython 3.12到3.14:我们逆向了217个AOT相关PR,提炼出6个决定编译成功率的核心宏定义(含Py_BUILD_CORE_MODULE与Py_LIMITED_API冲突解决方案)
第一章:Python 原生 AOT 编译方案 2026 高级开发技巧Python 社区在 2026 年迎来关键演进:CPython 官方正式集成原生 Ahead-of-Time(AOT)编译能力,无需依赖第三方运行时或 JIT 层即可生成平台专用的静态可执行文件。该特…...
:Chat Memory对话记忆实战,基于Redis实现持久化多轮对话)
Spring AI实战系列(七):Chat Memory对话记忆实战,基于Redis实现持久化多轮对话
一、系列回顾与本篇定位1.1 系列回顾第一篇:完成Spring AI与阿里云百炼的基础集成,基于ChatModel 实现同步对话与API Key安全注入。第二篇:解锁ChatClient,实现全局统一配置与链式调用,告别重复样板代码。第三篇&#…...

【限时开源】Polars 2.0清洗模板库V1.0发布:含金融时序对齐、电商ID映射、日志正则归一化等9大高复用Pipeline
第一章:Polars 2.0大规模数据清洗技巧入门到精通教程 Polars 2.0 是专为高性能、内存安全与并行计算设计的 DataFrame 库,其惰性执行引擎与零拷贝语义使其在处理 GB 级别结构化数据时显著优于 Pandas。本章聚焦真实场景下的数据清洗实践,涵盖…...
)
SAP FI模块实战:OBC4配置字段状态变式全流程解析(含常见报错处理)
SAP FI模块深度实战:OBC4字段状态变式配置与冲突解决指南 1. 字段状态变式的核心价值与应用场景 在SAP财务模块中,字段状态变式(Field Status Variants)是控制会计凭证输入界面的关键配置项。它决定了用户在创建财务凭证时&#x…...

论文AI率高怎么降最安全?2026保姆级降AIGC工作流:实测权威指令揭秘与3款工具横评
辛辛苦苦肝了三个月的论文,可是一经过学校的AI检测系统,却给我标了个醒目的65%!这我真是百口莫辩!明明每一个观点、每一处引用,都是我一点点阅读文献琢磨出来的! 为了把要命的 AI率 打下来,我之…...
)
告别CANoe依赖:手把手教你用Visual Studio 2019为UDS $27服务开发通用DLL(附Python调用脚本)
从零构建UDS安全访问DLL:Visual Studio 2019实战指南与Python无缝集成 在汽车电子诊断领域,UDS(Unified Diagnostic Services)协议的安全访问服务($27服务)是保护ECU敏感操作的核心机制。传统方案往往依赖C…...

2026最权威的六大降重复率工具解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 飞速发展的人工智能技术,正深切地重塑着学术写作的范式,当下…...

OpenJSCAD.org与3D打印完美结合:从代码到实物的完整工作流程
OpenJSCAD.org与3D打印完美结合:从代码到实物的完整工作流程 【免费下载链接】OpenJSCAD.org JSCAD is an open source set of modular, browser and command line tools for creating parametric 2D and 3D designs with JavaScript code. It provides a quick, pr…...