操作系统——信号

将信号分为以上四个阶段
1.信号注册:是针对信号处理方式的规定,进程收到信号时有三种处理方式:默认动作,忽略,自定义动作。如果不是自定义动作,这一步可以忽略。这个步骤要使用到signal/sigaction接口
2.信号产生:就是操作系统向进程发出信号
3.信号保存
4.信号捕捉处理
信号有哪些
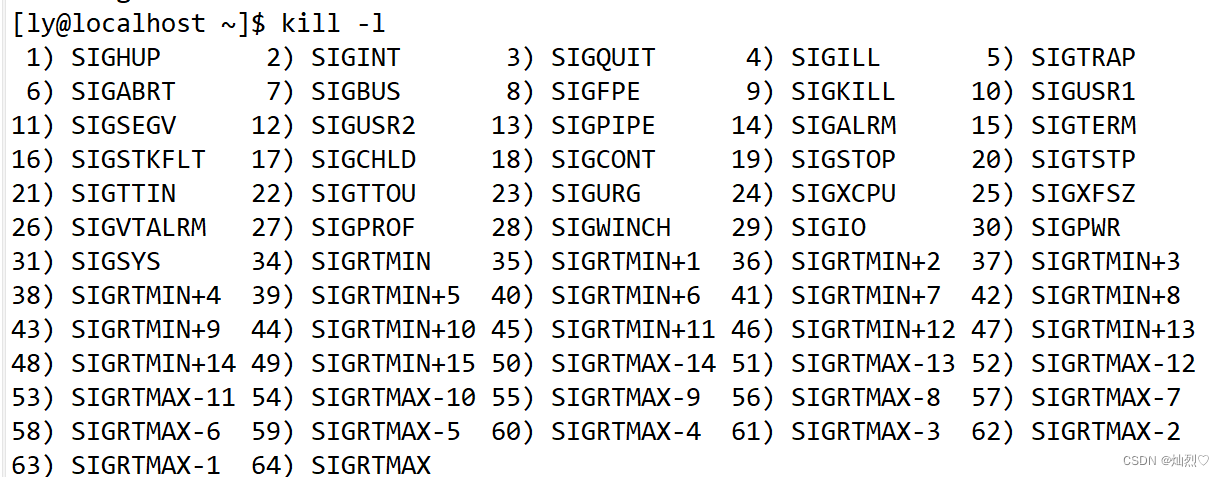
1-31是普通信号 34-62是实时信号

Action列指的是当信号被发送到一个进程时,默认操作系统采取的动作。具体的动作类型和含义如下:
-
Term (Terminate):
- 终止进程。此操作表示操作系统将结束进程的执行。这是大多数信号的默认动作。
-
Core (Terminate and Dump Core):
- 终止进程并生成核心转储文件。核心转储文件包含了进程在被终止时的内存状态,可以用于调试目的。想了解core的调试看这篇文章
-
Ign (Ignore):
- 忽略信号。进程接收到信号时,操作系统不会采取任何动作,也不会通知进程。
-
Stop:
- 停止进程的执行。进程被暂停,直到接收到继续信号(如SIGCONT)。
-
Cont (Continue):
- 继续执行被停止的进程。此操作恢复一个之前被暂停的进程的执行。
理解信号
信号和生活中的信号是一样的。例如下课铃声就是一个信号,上学的第一天,老师会告诉我们下课铃声响起的时候就可以下课休息——信号规定。当一节课的下课铃声响起,我们收到这个信号,但是老师想拖堂,我们先将这个信号保存到大脑,等老师讲完才会对下课信号处理。从下课铃声响起到真正下课这段时间就是时间窗口。信号产生了并不代表现在就要处理,进程会选择在合适的时间进行处理。
信号注册
signal

signal是将signum这个信号的处理方式进行自定义
注意:信号9和信号19不可以修改,因为进程终止和停止的权利必须由操作系统掌握
例子:
将信号1自定义捕捉
#include <iostream>
#include <signal.h>
#include <sys/types.h>
#include <unistd.h>using namespace std;
void fun(int signum)
{cout << "get signum" << signum << endl;
}int main()
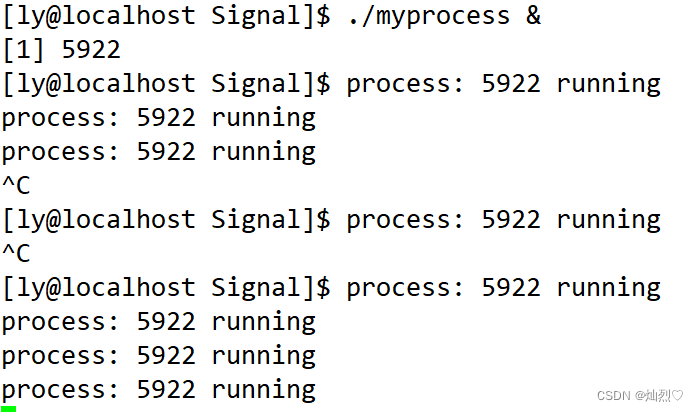
{signal(1,fun);while(1){cout << "process running pid:" << getpid() << endl;sleep(1);}return 0;
}运行程序发送信号1

sigaction
了解信号保存信号处理后再了解这个接口!!!!


sigaction结构体中,第一个是自定义动作函数指针,第三个是处理信号时要屏蔽的信号,其他的暂时不考虑。
act表示信号处理的方式,oact表示之前信号处理的方式。
例子:
#include <iostream>
#include <unistd.h>
#include <sys/types.h>
#include <signal.h>using namespace std;void PrintPend(sigset_t& set)
{for(int signo = 31; signo >= 1; signo--){if(sigismember(&set, signo)) cout << 1;else cout << 0;}cout << endl;
}
void header(int sig)
{sigset_t set;sigemptyset(&set);while(1){sigpending(&set);PrintPend(set);sleep(1);}
}
int main()
{struct sigaction act,oact;sigaddset(&act.sa_mask, 3);sigaddset(&act.sa_mask, 4);sigaddset(&act.sa_mask, 5);act.sa_handler = header;sigaction(SIGINT, &act, &oact);while(1){cout << "process running:" << getpid() << endl;sleep(1);}return 0;
}3 4 5 信号都被屏蔽了,处理信号的过程发送信号只会先保存
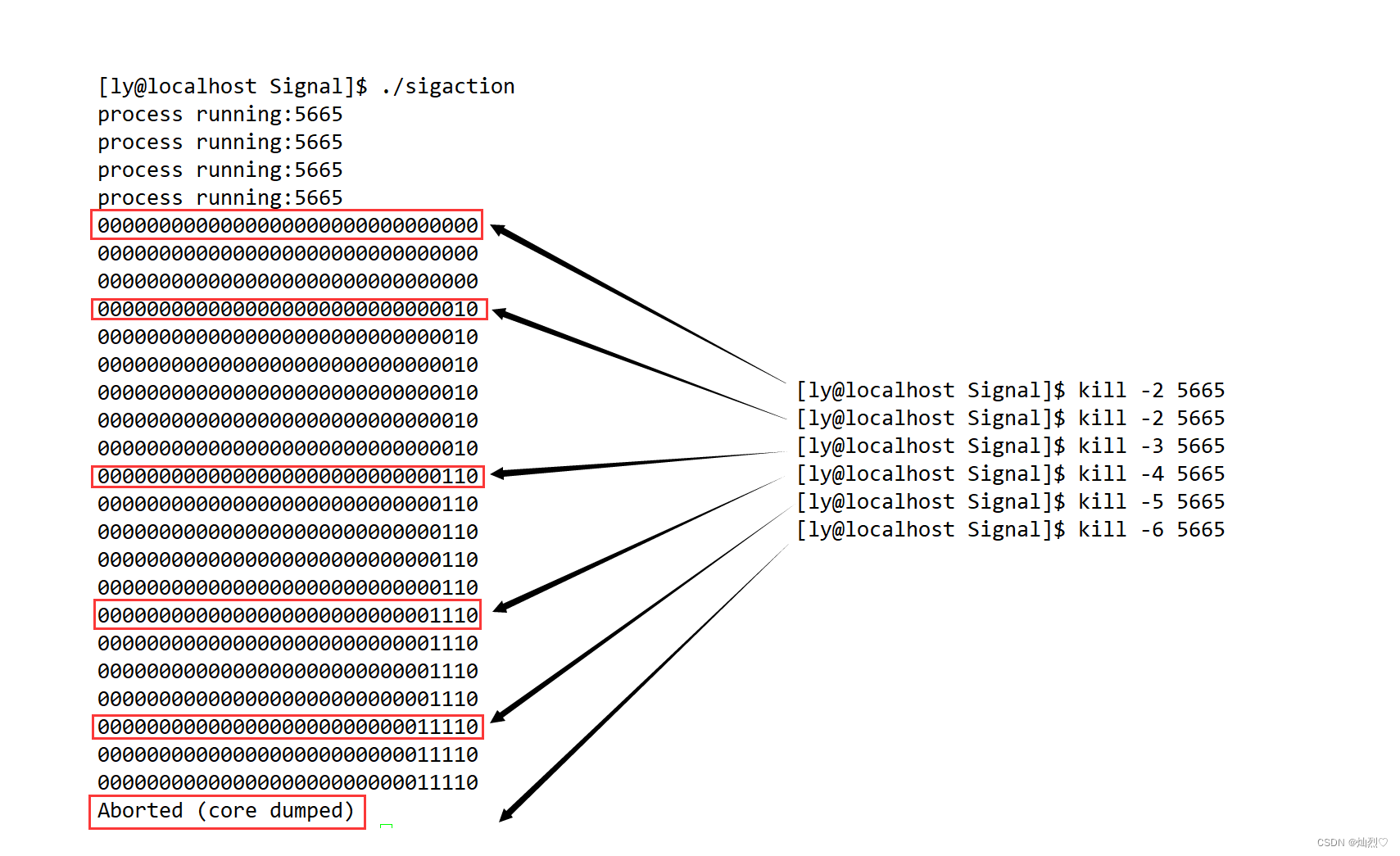
当操作系统处理信号调用自定义动作时先将对应信号pend置为0,为了防止信号的嵌套处理,还会自动将当前信号屏蔽。
sa_mask可以自己设置要屏蔽的信号
信号发送
什么是信号发送
信号是由OS向进程发送的,信号就一定保存在进程中。普通信号有31个,以位图的形式储存到进程PCB的一个int类型中。实时信号与普通信号的区别就是:实时信号收到后必须立即处理不会等待,实时信号是存储在进程的一个队列中。所以发信号就是操作系统修改对应的int值或者队列
信号发送方式
键盘组合键
例如:
ctrl+c,信号2中断进程
ctrl+\,信号3退出进程
键盘组合键是怎么发出信号的呢?
原理
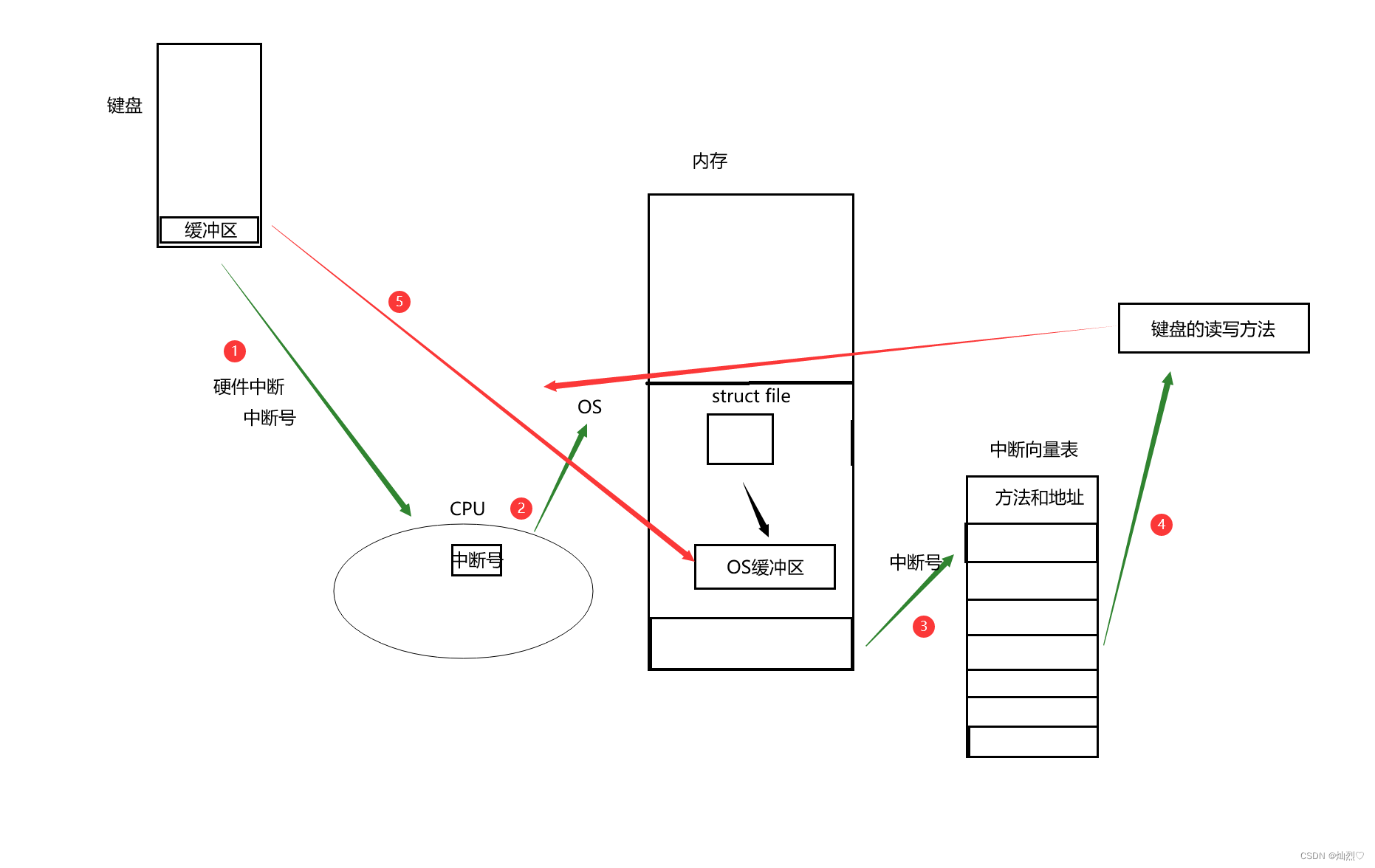
键盘写入完毕后,会向CPU发送硬件中断包括中断号,CPU告诉操作系统,操作系统通过中断号到中断向量表寻找中断号所对应的方法地址,使用该方法将键盘缓冲区的数据写到OS缓冲区,操作系统拿到数据后对进程发出信号
另外,键盘只能向前台进程(哪个进程能获取键盘输入,哪个进程就是前台进程)发送信号。Linux中一个登录只能有一个前台进程,可以有多个后台进程。
当我们./运行一个程序时,前台进程就是正在运行的程序,ctrl+c就会终止当前进程。
如果在运行时./后面加上&,当前进程就会以后台进程的方式运行,ctrl+c无效。因为前台进程是bash,此时键盘任何输入都会给bash,也就意味着这时可以使用命令行
kill命令
kill signum PID
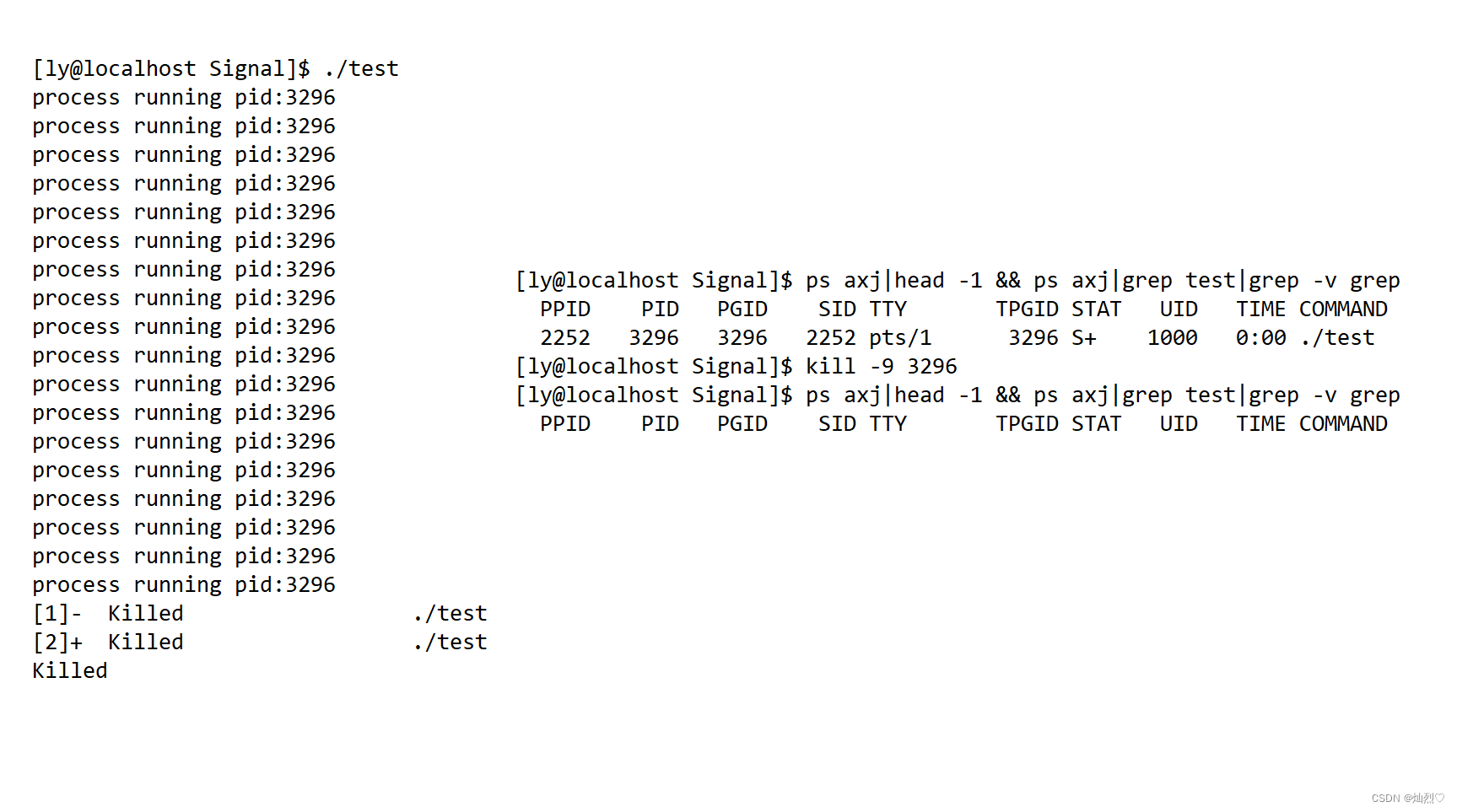
系统调用接口
kill
向其他进程发送信号

样例:
写一个可以给其他进程发信号的程序
//myprocess.cc
#include <iostream>
#include <sys/types.h>
#include <unistd.h>
using namespace std;
int main()
{while(1){cout << "process: " << getpid() << " running" << endl;sleep(1);}return 0;
}//mykill.cc
#include <iostream>
#include <sys/types.h>
#include <signal.h>using namespace std;
void Usage(const char* argv)
{cout << argv << " pid " << "sig" << endl;
}int main(int argc, const char* argv[])
{if(argc != 3){Usage(argv[0]);}else{int n = kill(stoi(argv[1]), stoi(argv[2]));if(n == -1){perror("kill fail");return -1;}}return 0;
}
raise
向当前进程发送信号

实际上调用了kill接口,相当于kill(getpid(), sig)
abort
让当前进程终止
实际上调用了kill接口,相当于kill(getpid(), 6)
注意:信号6是由其他进程发来的,不会让进程退出
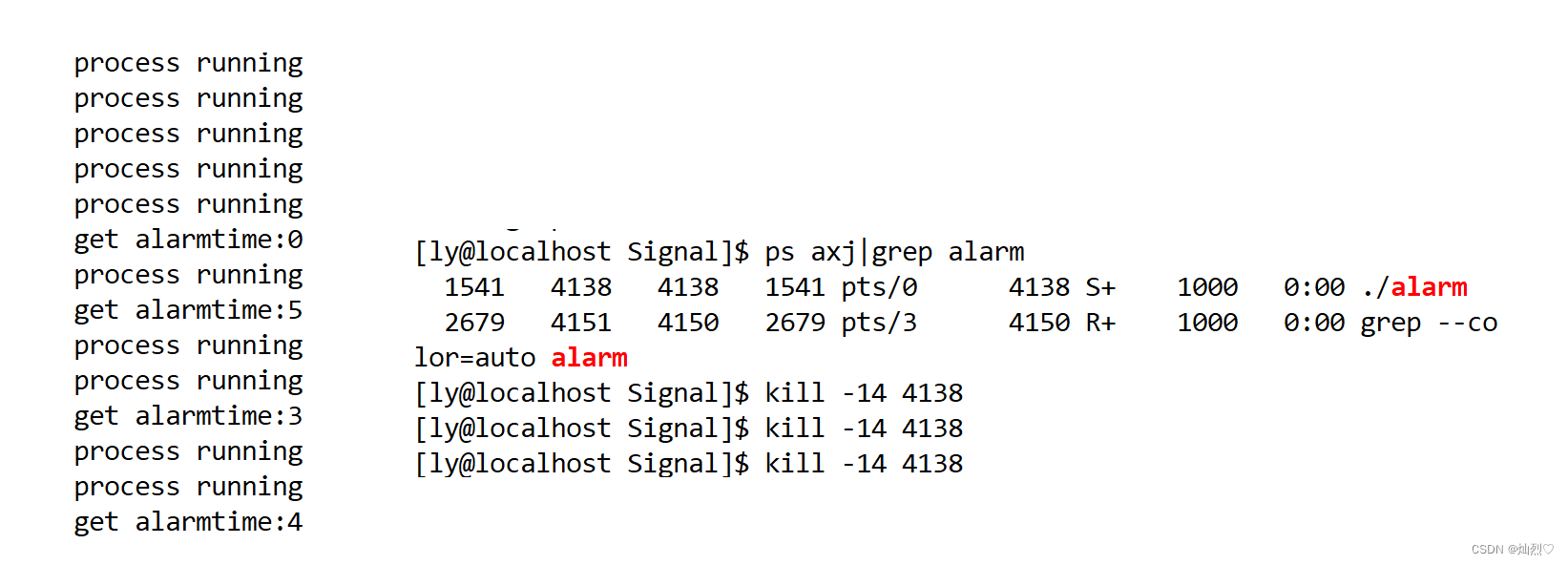
alarm
在设定时间过后,发送信号


返回前一个定时器的剩余时间(以秒为单位),如果之前没有设置定时器,则返回0
#include <iostream>
#include <signal.h>
#include <unistd.h>using namespace std;
void fun(int sig)
{int n = alarm(5);cout << "get alarm" << "time:" << n <<endl;
}int main()
{//alarm收到信号后默认退出进程,进行自定义信号捕捉signal(SIGALRM, fun);alarm(5);while(1){cout << "process running" << endl;sleep(1);}
}
异常
例如遇到除0错误时,CPU在运算的过程中出现错误,会将这个情况告诉操作系统,再由操作系统给进程发信号,中断进程。操作系统即是硬件设备的管理者也是进程的管理者
如果将这个信号自定义捕捉,并且捕捉的动作不会让进程退出,会怎么样呢?
#include <iostream>
#include <signal.h>
#include <sys/types.h>
#include <unistd.h>using namespace std;
void fun(int signum)
{cout << "get signum" << signum << endl;sleep(1);
}int main()
{signal(8,fun);int a= 1/0;return 0;
}
操作系统会一直给进程发信号。因为进程收到信号未关闭,进程会一直被CPU调度运行,一直出现错误。
信号保存
信号有几种状态:
递达(delivery):实际执行信号的处理动作
未决(panding):从信号被发出到递达之间的状态
阻塞(block):进程可以阻塞某个信号,当该信号别发出时,不会递达,只有当信号解除阻塞时才会递达
阻塞和忽略不同,忽略是递达后的处理方式
信号保存主要就是通过阻塞实现的
信号在内核中的表示:
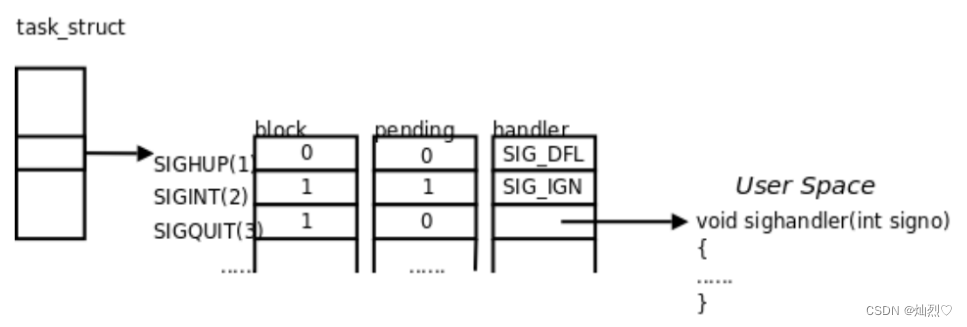
block位图表示信号是否被阻塞,pending位图表示信号是否发出,handler是函数指针数组,存储了信号的处理方法,SIG_DFL是默认方法,SIG_IGN是忽略,还可以指向用户区自己定义的方法。
操作系统提供了block(阻塞信号集/信号屏蔽字)和pending(未决信号集)的数据类型sigset_t还有相应的系统调用接口
信号集操作接口
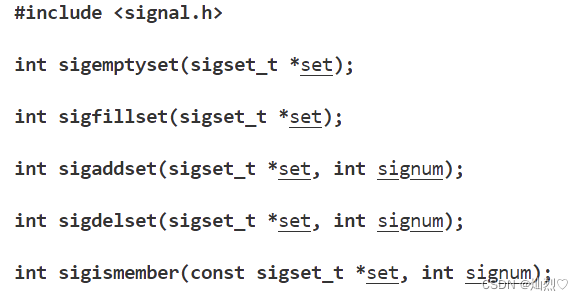

sigemptyset将所有标志位都置为0,sigfillset将所有标志位都置为1
sigaddset/sigdelset :增加/删除signum信号所对应的位置
sigismember检测signum在set中是否为1

修改屏蔽信号字接口

how可以以下有几个值:
SIG_BLOCK:set中包含了希望添加到当前屏蔽信号字的信号
SIG_UNBLOCK:set包含了希望从当前屏蔽信号字删除的信号
SIG_SETMASK:将屏蔽信号字设置为set
set就是用来更改信号屏蔽字的屏蔽字参数,oset用来存储更改信号屏蔽字之前的屏蔽字参数
显示未决信号集的接口
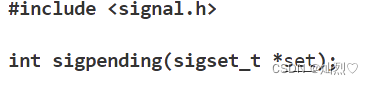
将未决信号集拷贝到set
实例
#include <iostream>
#include <signal.h>
#include <unistd.h>using namespace std;void hander(int sig)
{cout << "get signal:" << sig << endl;
}int main()
{signal(2,hander);sigset_t set, oset;sigemptyset(&set);sigemptyset(&oset);sigaddset(&set, SIGINT);//设置屏蔽信号字sigprocmask(SIG_BLOCK, &set, &oset);int cnt = 5;while (1){sigset_t pending;sigpending(&pending);//展示未决信号集for (int i = 31; i >= 1; i--){if (sigismember(&pending, i))cout << "1";elsecout << "0";}cout << endl;sleep(3);cnt--;if(cnt == 0)//解除屏蔽信号字{sigprocmask(SIG_SETMASK, &oset, nullptr);}}return 0;
} 注意,和信号捕捉一样,信号9和信号19不可以被阻塞
注意,和信号捕捉一样,信号9和信号19不可以被阻塞
信号处理
什么时候处理
结论:当进程从内核态变为用户态,操作系统会进行信号的检测和处理。
内核态:进程访问操作系统的代码和数据
用户态:进程访问自己的代码和数据

CPU中有一些寄存器的标志位可以区分进程在哪个态。有几个进程就有几个用户级页表,而内核级页表只有一个,不管进程怎么切换,每个进程看到的内核空间都是一样的。从进程的角度看,调用系统调用接口,就是在自己的进程地址空间调用。从操作系统的角度看,在任意时刻,只要有进程运行就可以随时调用系统调用接口。
怎么处理
当进程进入内核态(例如调用了系统调用接口),在执行系统调用操作后,会检查是否有可以递送的信号并进行处理然后返回用户态,如果是处理自定义的动作信号,就会先从内核进入用户态(因为用户态下,处理函数做非法操作会被操作系统拦截,保证了安全性),调用信号处理函数,再回到内核态,最后返回用户态,从主控制流程上次中断的地方继续执行

信号与进程等待
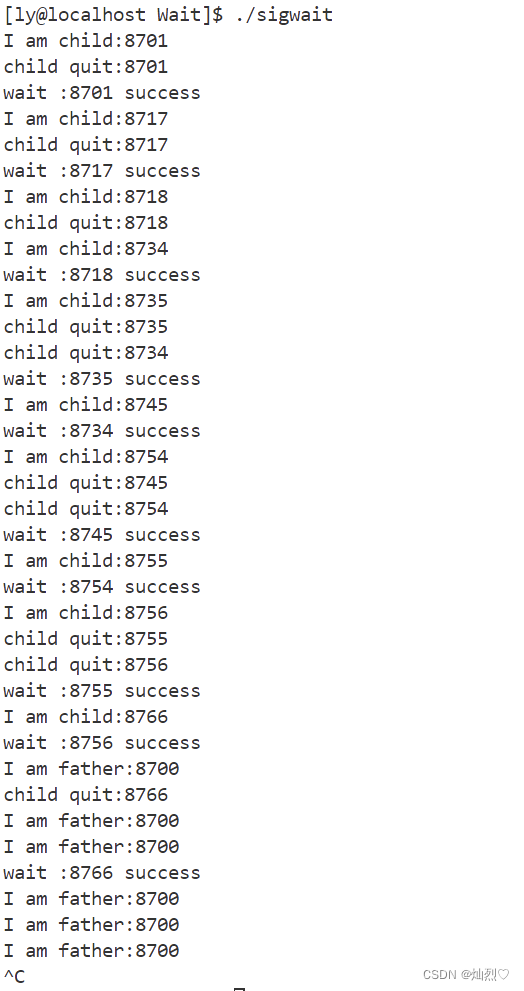
子进程退出会向父进程发送信号SIGCHLD,不过这个信号默认处理方式时忽略的,可以通过自定义捕捉对进程回收。
#include <iostream>
#include <signal.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <time.h>using namespace std;
void header(int sig)
{pid_t rid;while((rid = waitpid(-1,nullptr,WNOHANG)) > 0){cout << "wait :" << rid << " success" << endl;}
}int main()
{srand(time(nullptr));signal(SIGCHLD, header);// 创建10个子进程for (int i = 10; i > 0; i--){pid_t id = fork();if (id == 0){cout << "I am child:" << getpid() << endl;sleep(rand() % 2 + 1);cout << "child quit:" << getpid() << endl;sleep(rand() % 2 + 1);exit(0);}sleep(rand() % 3 + 3);}while(1){cout << "I am father:" << getpid() << endl;sleep(1);}
}
事实上,由于UNIX 的历史原因,要想不产生僵尸进程还有另外一种办法:父进程调 用sigaction将SIGCHLD的处理动作 置为SIG_IGN,这样fork出来的子进程在终止时会自动清理掉,不 会产生僵尸进程,也不会通知父进程。系统默认的忽 略动作和用户用sigaction函数自定义的忽略 通常是没有区别的,但这是一个特例。此方法对于Linux可用,但不保证 在其它UNIX系统上都可 用。请编写程序验证这样做不会产生僵尸进程。
相关文章:
操作系统——信号
将信号分为以上四个阶段 1.信号注册:是针对信号处理方式的规定,进程收到信号时有三种处理方式:默认动作,忽略,自定义动作。如果不是自定义动作,这一步可以忽略。这个步骤要使用到signal/sigaction接口 2.…...

力扣1482.制作m束花所需的最少时间
力扣1482.制作m束花所需的最少时间 二分答案 check的时候 用一个bool数组判断是否开花找连续的k朵花 const int N 1e510;int st[N];class Solution {public:int minDays(vector<int>& bloomDay, int m, int k) {int n bloomDay.size();if(n < (long long)m*…...

解决 Linux 和 Java 1.8 中上传中文名称图片报错问题
在 Linux 系统和 Java 1.8 中,当尝试上传含有中文名称的图片时,可能会遇到以下错误提示: Caused by: java.nio.file.InvalidPathException: Malformed input or input contains unmappable characters: /home/uploadPath/2024/06/12/扣子蝴蝶…...
cocos开发的时候 wx.onShow在vscode里面显示红色
这个函数是在微信小游戏平台才会用到。 cocos识别不到wx这个变量。 可以改成下面的写法。 只要在变量前面加一个globalThis.就能识别这个变量了。也不报错了。 搞死强迫症了。orz 欢迎大家来玩我的微信小游戏。多多提意见啊。...

使用 PNPM 从零搭建 Monorepo,测试组件并发布
1 目标 通过 PNPM 创建一个 monorepo(多个项目在一个代码仓库)项目,形成一个通用的仓库模板。 这里以在该 monorepo 项目中搭建 web components 类型的组件库为例,介绍从仓库搭建、组件测试到组件发布的整个流程。 这个仓库既可…...

Oracle 19C 数据库表被误删除的模拟恢复
Oracle 19C 数据库表被误删除的模拟恢复操作 1、模拟创建表用于恢复测试 sqlplus zzh/zzh SQL> create table obj_tb tablespace users as select * from dba_objects; Table created. SQL> select count(*) from obj_tb; COUNT(*) ---------- 72373 2、记录当前…...
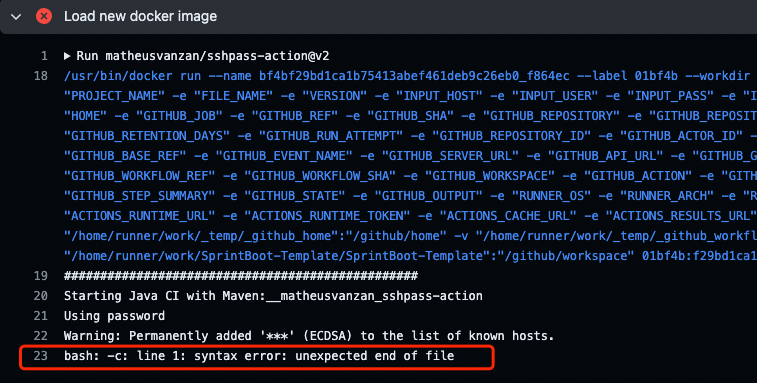
【CICID】GitHub-Actions语法
[TOC] 【CICID】GitHub-Actions语法 1 场景 当我们开发过程中,经常需要提交代码,打包,部署新代码到对应的环境,整个过程都是人工手动操作,占据开发人员大量时间,并且很繁琐容易出错。所以需要借助一些…...

Ionic 创建 APP
Ionic 创建 APP Ionic 是一个强大的开源框架,用于构建高性能、高质量的移动和网页应用程序。它结合了 Angular、React 或 Vue 的强大功能,以及 Capacitor 或 Cordova 的原生功能,使得开发者可以轻松地创建跨平台的应用程序。本篇文章将指导您如何使用 Ionic 创建一个基本的…...
【数学代码】幂
Hello!大家好,我是学霸小羊,今天来讲讲幂。 求几个相同因数的积的运算,叫做乘方,乘方的结果叫做幂。 a^n,读作 “ a的n次方 ” 或 “ a的n次方幂”,a叫做底数,n叫做指数。 对于底数、指数和幂…...
 函数)
os.system() 函数
os.system() 是 Python 标准库 os 模块中的一个函数,用于在子终端中运行系统命令。它可以在 Python 脚本中调用外部命令或程序。具体来说,它通过执行命令字符串并返回执行状态来实现这一点。下面是对 os.system() 函数的详细解释: import os…...

Spring Boot中的RESTful API详细介绍及使用
在Spring Boot中,RESTful API的实现通过控制器类中的方法和特定的注解来完成。每个注解对应不同的HTTP请求方法,并通过处理请求参数和返回响应来实现不同的操作。 下面将详细解释RESTful API中的各个方面,包括GetMapping, PostMapping, PutMa…...
nlp学习笔记
目录 很多入门例子 bert chinese 很多入门例子 https://github.com/lansinuote/Huggingface_Toturials bert chinese import torch import torch.nn as nn from transformers import AutoTokenizer, AutoModel, BertModel, TFBertModel, BertTokenizer# youpath = D:/bert-…...

使用python获取内存信息
#!/usr/bin/python # -*- coding:utf-8 -*- psutil模块是一个跨平台的获取进程和系统应用情况(CPU,内存,磁盘,网络,传感器)的库。 该模块用于系统监控、限制进程资源和运行进程的管理等方面。 内存信息&am…...

外包公司泛滥,这些常识你应该提前知道?
今年大环境确实很不好 很多985,211的应届生都在网上大吐苦水,很多大龄离职大厂的技术人也好,业务人也好,都纷纷转向短视频平台做起了自媒体。而找工作的人普遍发现,某最火的招聘平台几乎都被外包公司刷屏了。大大小小的外包公司如…...

Linux下的抓包工具使用介绍
应用层 传输层 网络层 数据链路层 物理层 1)tcpdump(传输/网络层) tcpdump -i eth0 tcpdump -i eth0 -vnn -v:显示包含有TTL,TOS值等等更详细的信息 -n:不要做IP解析为主机名 -nn:…...
centos环境上:k8s 简单安装教程
本次演示安装3节点k8s环境,无需多言,直接上操作步骤: 1、环境准备 k8s部署前,首先需要准备好环境,除了1.4 步骤,其他步骤在所有(3个)节点上都要执行: 1.1 关闭防火墙 s…...
短视频矩阵系统/源码搭建---拆解热门视频功能开发上线
短视频矩阵系统/源码搭建 一、短视频矩阵系统源码开发需要用到以下技术: 1.前端技术:HTML、CSS、JavaScript、Vue.js等前端框架。 2.后端技术:Java、Python、PHP等后端语言及相关框架,如Spring Boot、Django、Laravel等。 3.移…...
手机和模拟器的 Frida 环境配置
目录 一、配置 JDK 和 android 环境 二、连接设备和查看权限 1、连接设备 2、查看手机权限 三、手机配置 Frida 1、frida-server下载 2、验证 四、模拟器配置 Frida 1、下载模拟器并调节成手机版: 2、连接并查看架构 3、配置并开启 x86 的 frida-serve…...

力扣1385.两个数组间的距离值
力扣1385.两个数组间的距离值 二分判断答案是否正确 class Solution {public:int findTheDistanceValue(vector<int>& arr1, vector<int>& arr2, int d) {ranges::sort(arr2);ranges::sort(arr1);int m arr2.size();auto check [&](int low,int h…...

[C++] 小游戏 斗破苍穹 2.11.6 版本 zty出品
大家好,今天zty带来的是斗破苍穹的 2.11.6 版本,这个版本主要更新了:1、背包 2、将退出游戏改到了设置里面 3、如果不逃跑不会停止战斗。废话不多说, 先赞后看 养成习惯 code #include<stdio.h> #include<iostrea…...

别再乱装驱动了!Ubuntu 20.04显卡驱动‘掉了’的终极排查与修复思路
Ubuntu 20.04显卡驱动失效的系统化诊断与修复指南 当你正专注于一个重要项目时,突然发现Ubuntu的NVIDIA显卡驱动"神秘消失"——这种体验对Linux用户来说简直像一场噩梦。nvidia-smi命令返回"驱动未加载",外接显示器黑屏,…...

订阅Token Plan套餐后在长期项目中的成本节约效果分析
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 订阅Token Plan套餐后在长期项目中的成本节约效果分析 对于需要持续、稳定调用大模型的个人开发者或团队而言,成本控制…...

金融机器学习实战:MlFinLab工具包核心模块解析与应用指南
1. 从零到一:为什么我们需要一个金融机器学习的“瑞士军刀”?如果你和我一样,在量化金融和算法交易这条路上摸爬滚打了好几年,那你一定经历过这样的场景:为了复现一篇顶级期刊论文里的某个特征工程方法,你需…...

马斯克诉奥尔特曼案第三周:微软与 OpenAI 举证反击,争议焦点浮出水面
【案件进展概述】智东西 5 月 12 日消息,今天,马斯克诉奥尔特曼案进入第三周,被告方关键证人相继出庭,微软 CEO 萨提亚纳德拉 (Satya Nadella)、OpenAI 联合创始人兼前首席科学家 伊利亚苏茨克维 ÿ…...
:无监督拓扑保持的高维数据可视化与聚类)
自组织映射(SOM):无监督拓扑保持的高维数据可视化与聚类
1. 什么是自组织映射(SOM)?它到底能帮你解决什么实际问题?我第一次在客户现场看到SOM落地,是在一家做工业设备预测性维护的公司。他们有上百台传感器,每台每秒产生十几维的振动、温度、电流数据,…...

如何绕过Cursor Pro试用限制:技术原理与实战指南
如何绕过Cursor Pro试用限制:技术原理与实战指南 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your trial re…...

uHabits习惯追踪应用完整指南:从入门到精通的5个实用技巧
uHabits习惯追踪应用完整指南:从入门到精通的5个实用技巧 【免费下载链接】uhabits Loop Habit Tracker, a mobile app for creating and maintaining long-term positive habits 项目地址: https://gitcode.com/gh_mirrors/uh/uhabits uHabits习惯追踪应用是…...
)
别再死记硬背了!用一块74283芯片搞定所有BCD码转换(附实战练习题)
用74283芯片玩转BCD码转换:从原理到实战的终极指南 在数字电路设计与计算机组成原理的学习中,BCD码转换一直是让许多学生头疼的"拦路虎"。传统的死记硬背方法不仅效率低下,更无法应对考试中千变万化的题型。本文将彻底改变这一现状…...

如何利用WinRAR分卷压缩,轻松突破大文件传输限制
1. 为什么需要分卷压缩? 在日常工作和生活中,我们经常会遇到需要传输大文件的情况。比如设计师要发送PSD源文件给客户,程序员要分享开发环境的镜像,或者普通用户想通过邮件发送高清视频给亲友。但几乎所有主流传输平台都对单个文件…...
)
告别手动重命名!Win10下用CMD脚本批量给照片加001-999编号(保姆级教程)
告别手动重命名!Win10下用CMD脚本批量给照片加001-999编号(保姆级教程) 每次整理上百张照片时,最痛苦的就是一张张手动重命名。作为一名经常需要处理大量素材的自媒体创作者,我试过各种方法——从资源管理器的F2快捷键…...