STM32 Customer BootLoader 刷新项目 (一) STM32CubeMX UART串口通信工程搭建
STM32 Customer BootLoader 刷新项目 (一) STM32CubeMX UART串口通信工程搭建
文章目录
- STM32 Customer BootLoader 刷新项目 (一) STM32CubeMX UART串口通信工程搭建
- 功能与作用
- 典型工作流程
- 1. 硬件原理图介绍
- 2. STM32 CubeMX工程搭建
- 2.1 创建工程
- 2.2 系统配置
- 2.3 USART串口配置
- 2.4 时钟树配置
- 2.5 工程导出设置
- 3. 代码编写
- 4. 工程下载和调试
首先用STM32CubeMX 软件搭建基础工程,来作为二级BootLoader,一级BootLoader是STM32官方自带的startup_stm32f407zgtx.s。我们基于上述最小工程来实现Customer BootLoader的功能。本项目采用的是通过串口实现固件刷新。
下面简单介绍一下二级BootLoder的功能与作用:
二级Customer BootLoader(CBL,Customer BootLoader)是一种在嵌入式系统中常见的软件组件。它主要负责在系统启动时执行初始引导操作,加载和运行应用程序代码。二级Customer BootLoader与一级BootLoader(通常称为Primary BootLoader, PBL)一起工作,提供了更灵活和复杂的引导机制。
功能与作用
- 硬件初始化: 二级Customer BootLoader通常负责对特定硬件的初始化工作。虽然一级BootLoader已经完成了一些基本的硬件初始化,但二级BootLoader会进行更详细的硬件配置,如设置外设(例如UART、SPI、I2C等)、初始化存储设备(如Flash、EEPROM等)以及配置系统时钟等。
- 固件验证与更新: 二级Customer BootLoader常常用于验证固件的完整性和合法性。这可以通过校验和(Checksum)、加密签名等方式来实现。若检测到固件损坏或版本过旧,BootLoader可以从预设的位置(如网络、USB设备或备用存储区)下载并更新固件。
- 安全启动: 为了增强系统安全性,二级BootLoader可以实现安全启动机制。它会检查固件的数字签名或哈希值,确保只有经过验证和授权的固件才能被加载和执行,从而防止恶意代码的运行。
- 引导多种操作系统或应用程序: 二级Customer BootLoader可以配置为引导不同的操作系统或应用程序。例如,在嵌入式系统中,可能需要根据不同的条件引导进入不同的应用程序模块,BootLoader可以根据预设的规则进行选择和加载。
- 配置和诊断功能: 二级BootLoader可以提供一些配置和诊断功能。例如,它可以允许用户通过串口或网络接口进入配置模式,调整系统参数,进行硬件诊断和调试。
- 引导时间优化: 由于嵌入式系统通常需要快速启动,二级BootLoader可以优化引导过程,减少启动时间。它可以通过压缩固件、优化初始化代码等手段来实现快速引导。
典型工作流程
- 系统加电后,一级BootLoader(PBL)启动:
- 负责基本硬件初始化(如设置堆栈指针、初始化RAM等)。
- 加载并执行二级BootLoader(CBL)。
- 二级BootLoader启动:
- 执行更详细的硬件初始化。
- 验证固件的完整性和合法性。
- 根据系统配置和状态,选择合适的固件或操作系统进行引导。
- 加载并启动应用程序或操作系统。
目前本项目的Customer BootLoader具备:
- 获取软件版本;
- 读芯片Chip ID;
- 获取Flash Read Protection等级;
- 擦除指定Flash Sector;
- 更新指定Flash Sector内容;
- 使能读/写保护;
下面开始我们本章内容的工程搭建,其中部分图借用洋桃电子杜老师的STM F4系列的课程内容。
1. 硬件原理图介绍
本项目采用正点原子探索者v2开发板,选用其中的左下角的USB串口进行和上位机之间的串口通信。
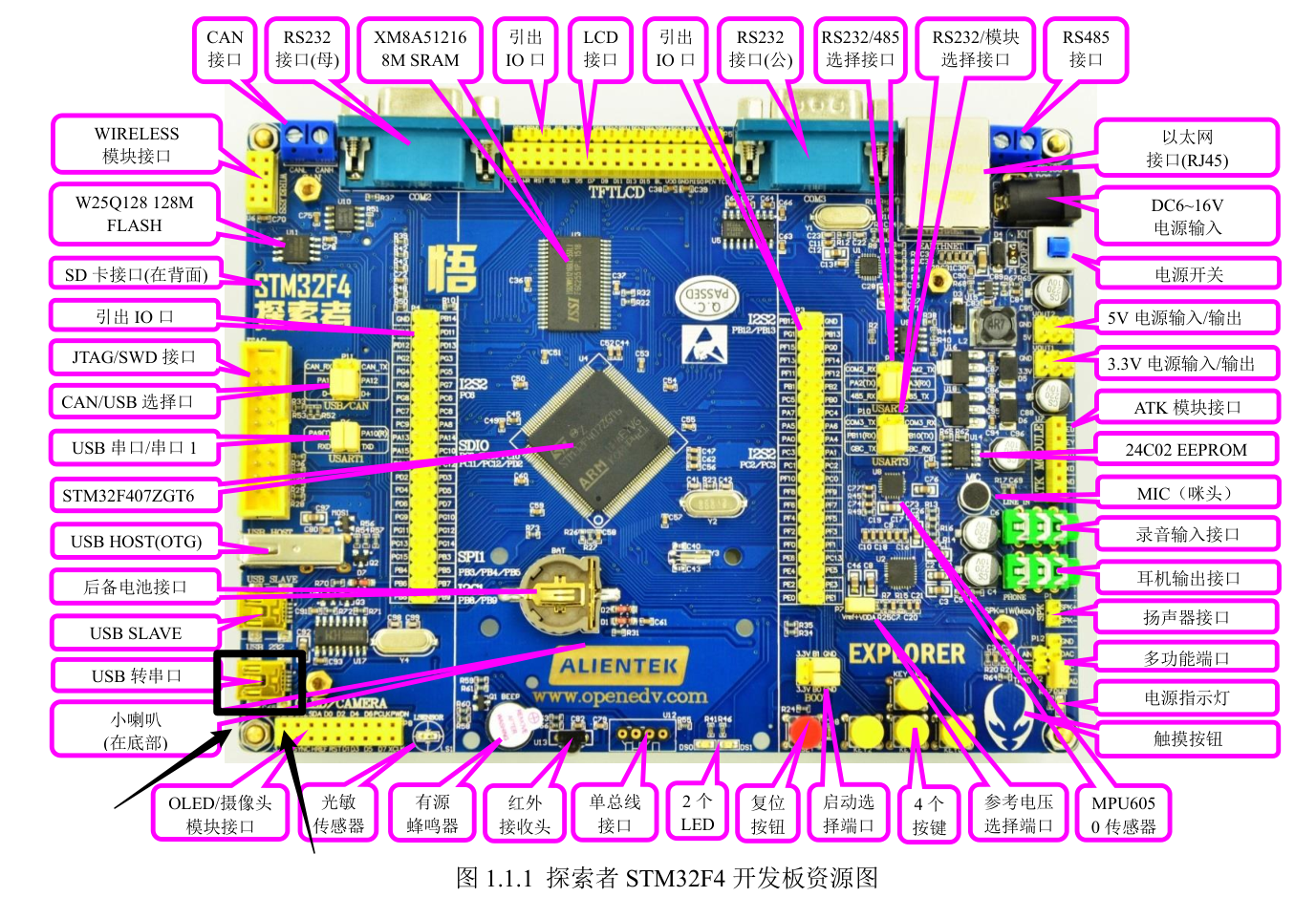
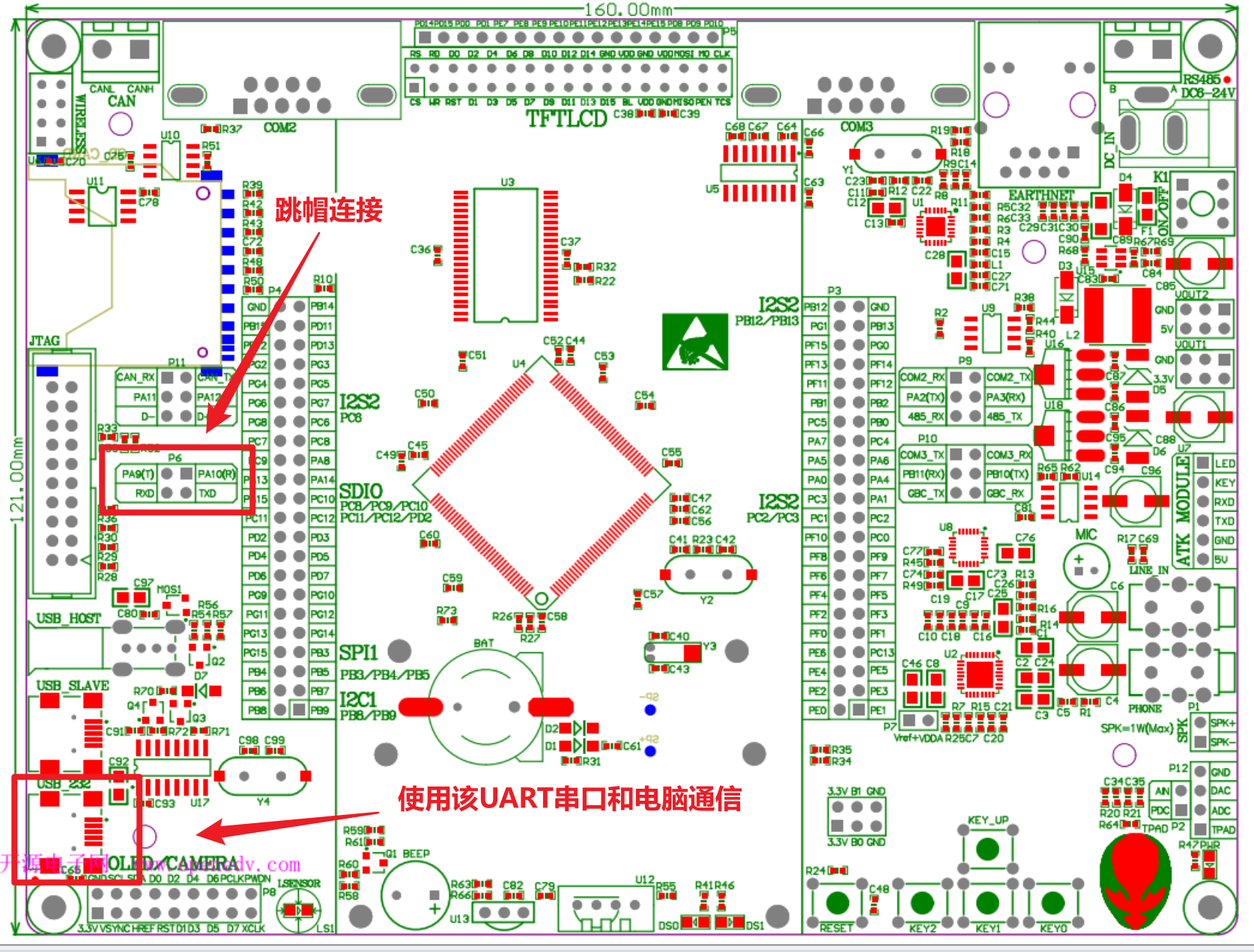
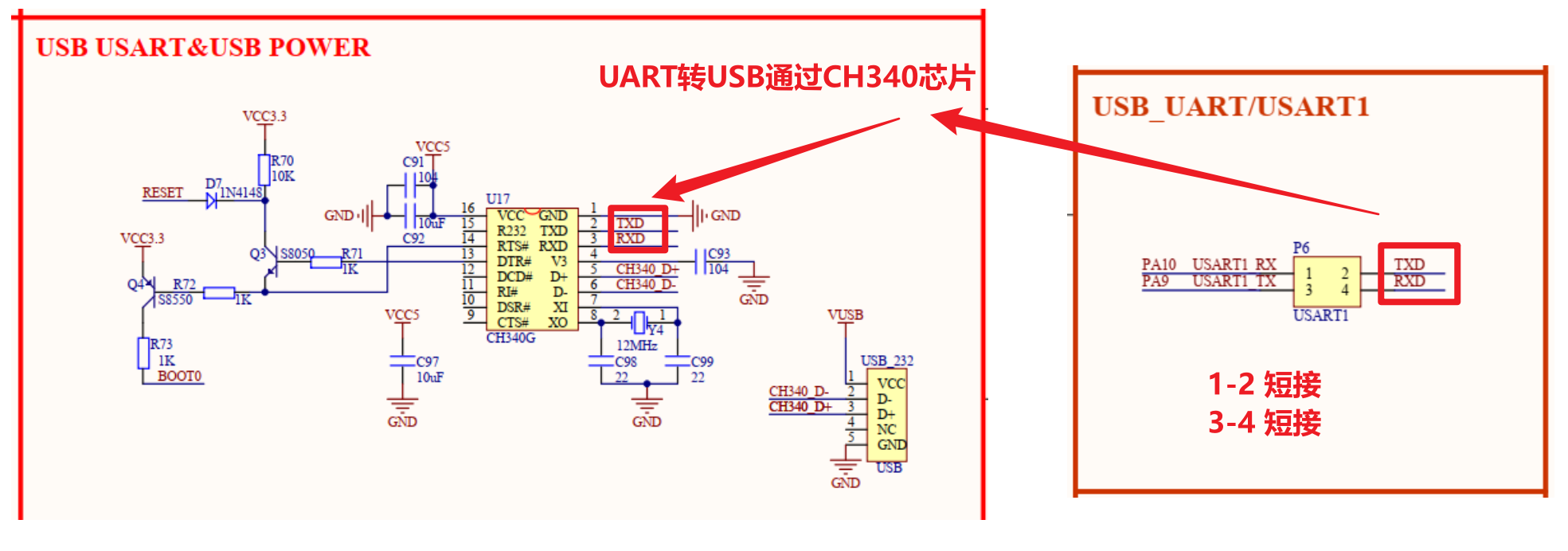
正点原子STM32F4 探索者V2开发板,如下图所示,通过短接PA9-RXD,短接PA10-TXD,即将USART1与CH340芯片连接在一起,串口USART1与上位机可通过USB进行通信。
如下图电路所示,使用一根MicroUSB结构的USB数据线,一端连接计算机的USB口,一端连接开发版左下角的USB_232口上,就可以在计算机上虚拟出一个串口,通过这个虚拟串口可以进行计算机与开发板之间的串口通信。

2. STM32 CubeMX工程搭建
2.1 创建工程
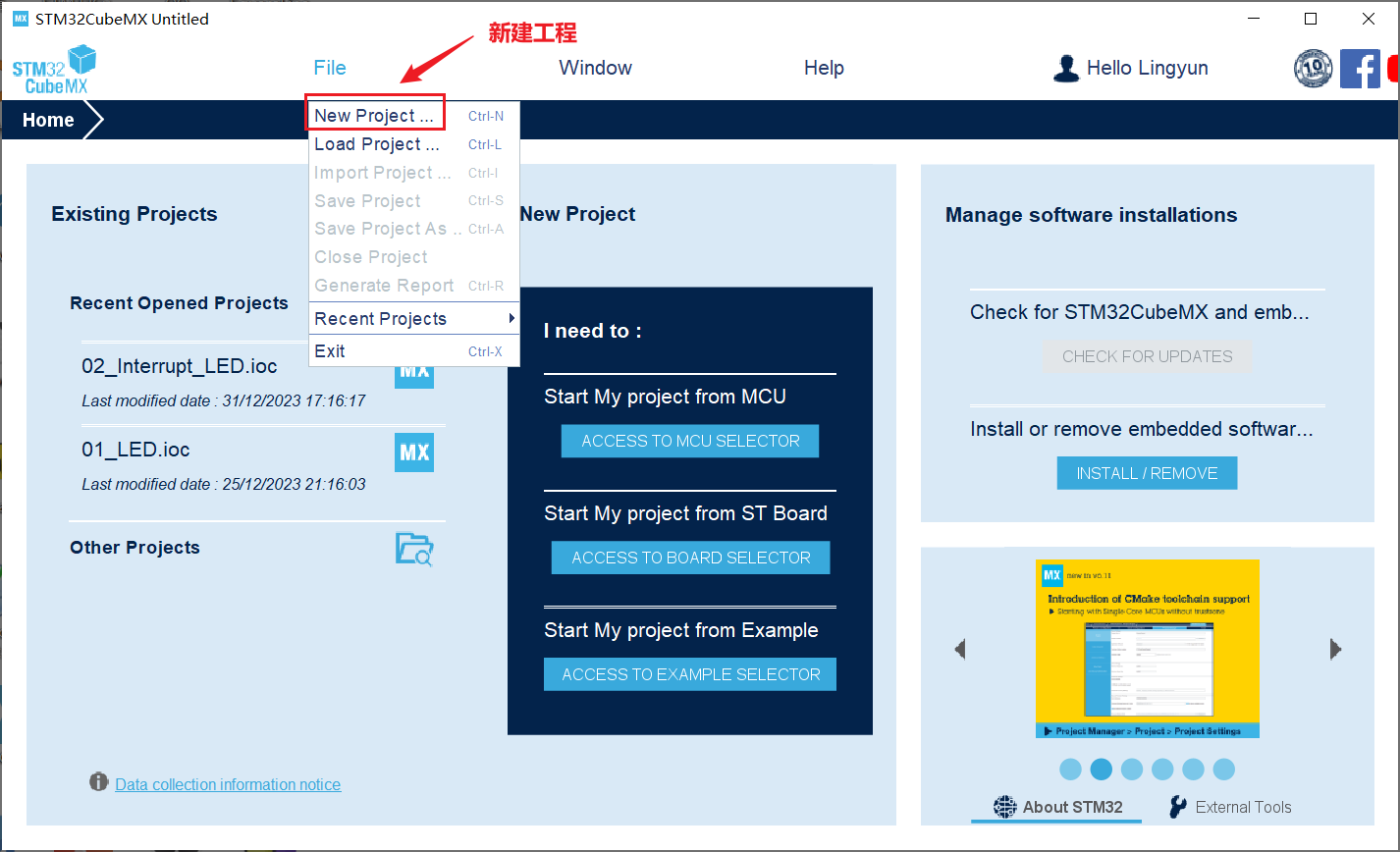
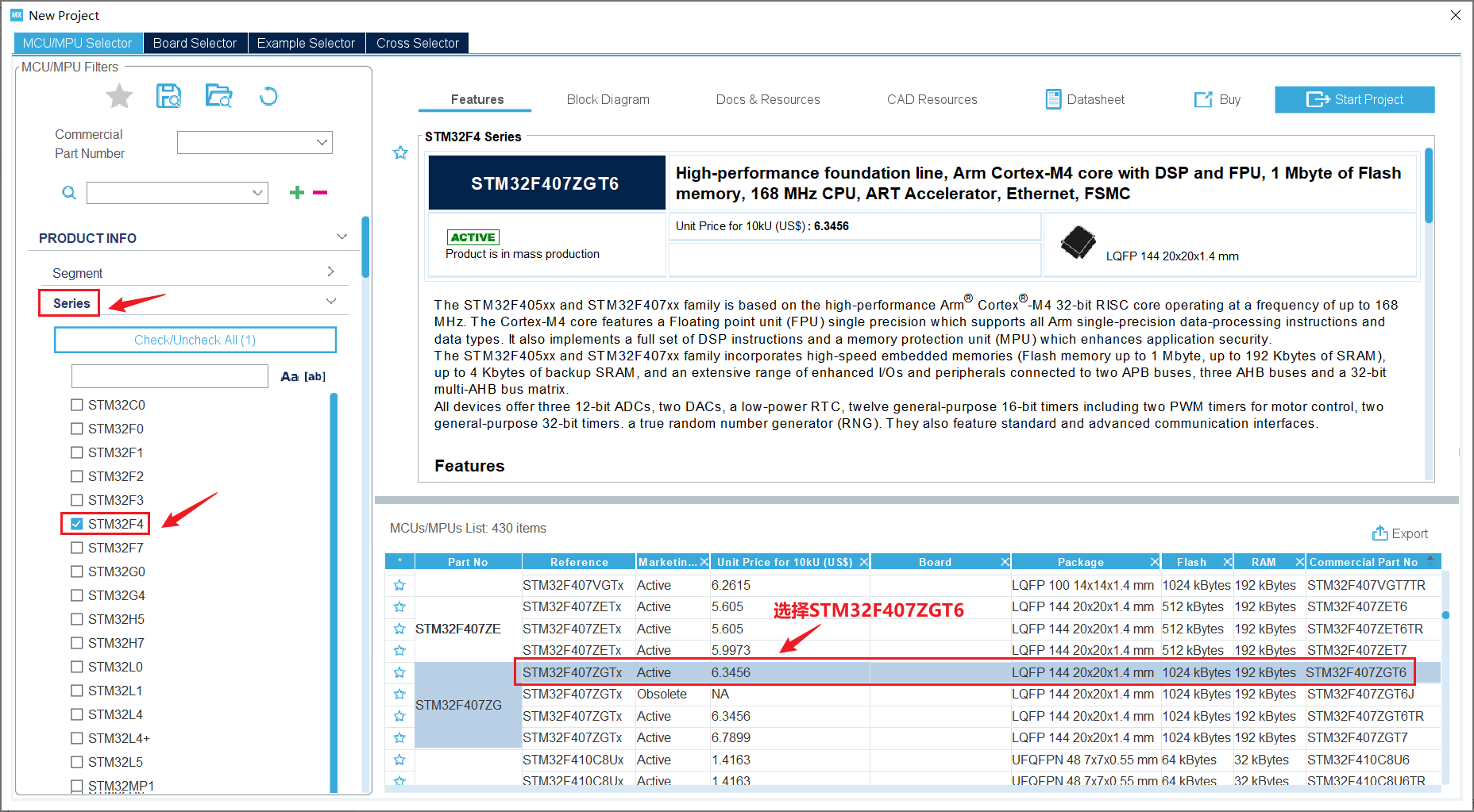
打开STM32CubdeMX,点击New Project创建新工程
选择 STM32F407 ZGT6
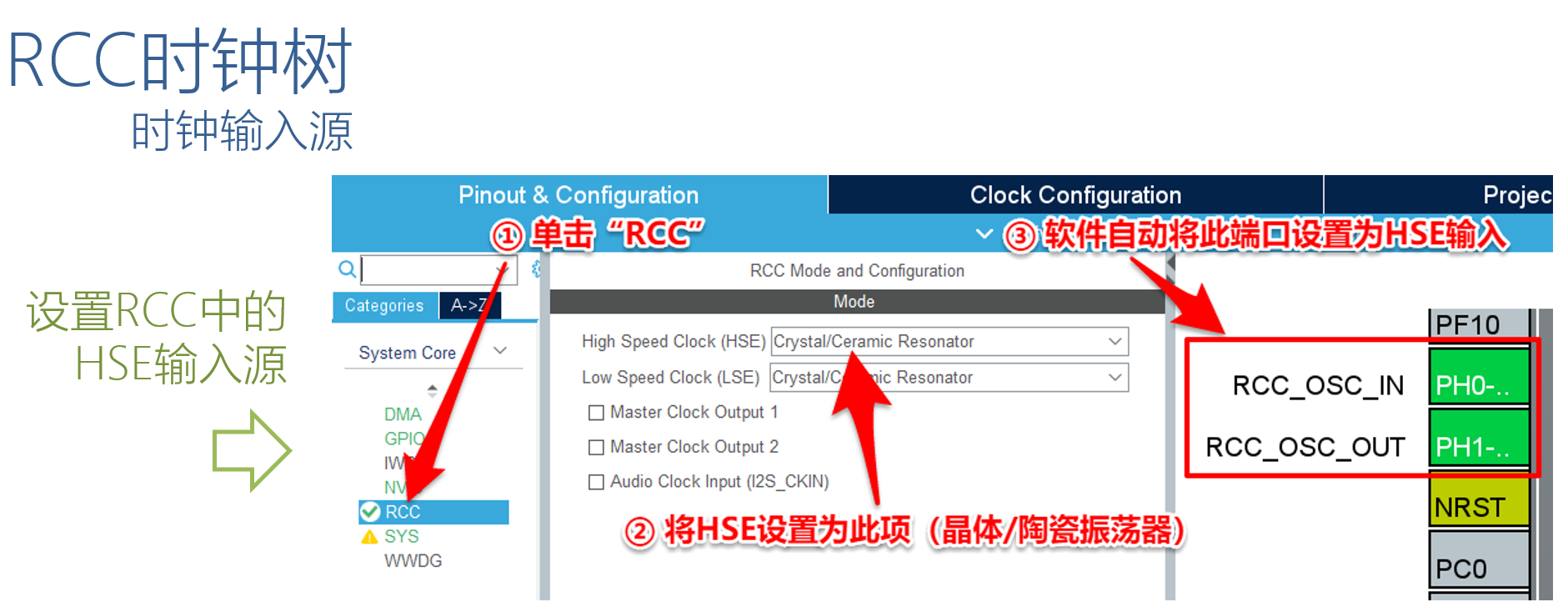
2.2 系统配置
点击左侧System Core,选择RCC,将HSE和LSE都设置为Crystal/Ceramic Resonator(晶体/陶瓷振荡器)
点击SYS,选择Debug功能为JTAG(5 pins),跟板子调试口对应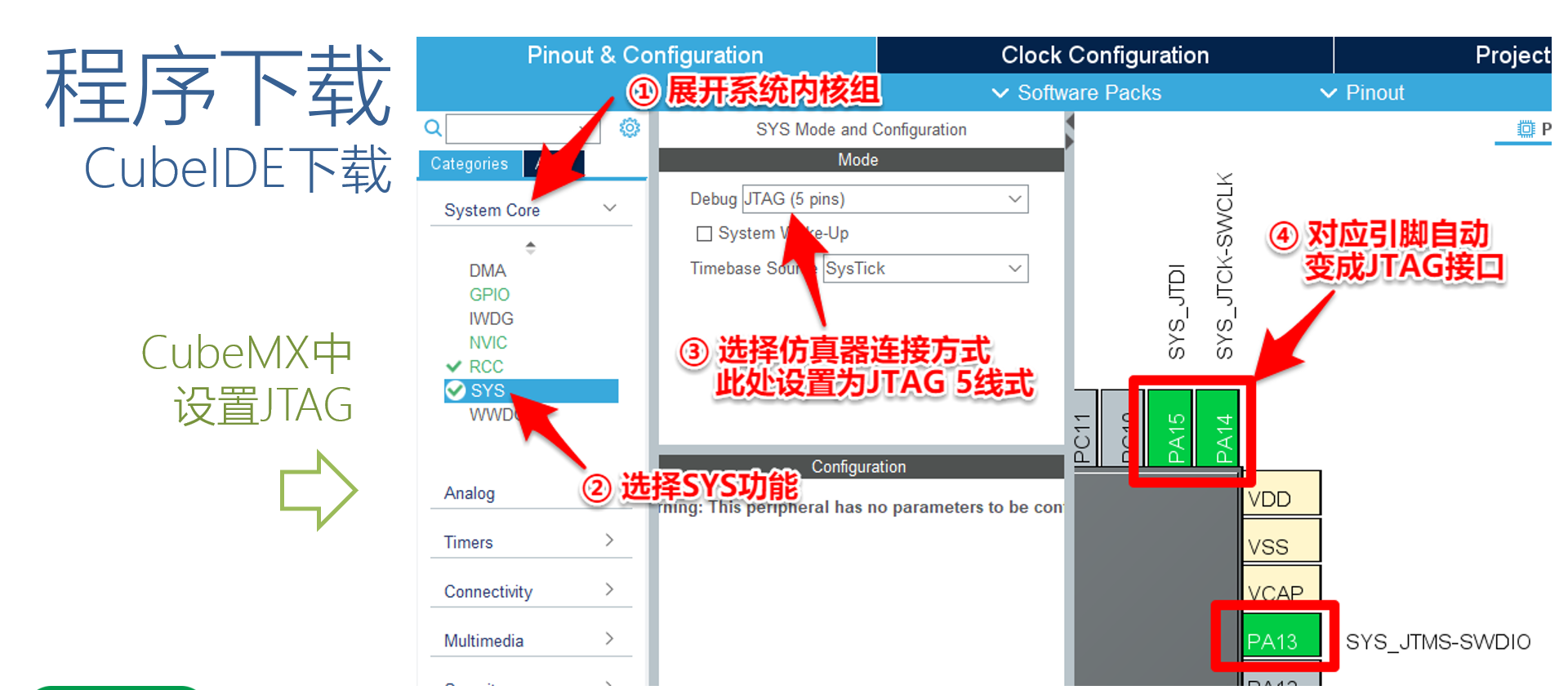
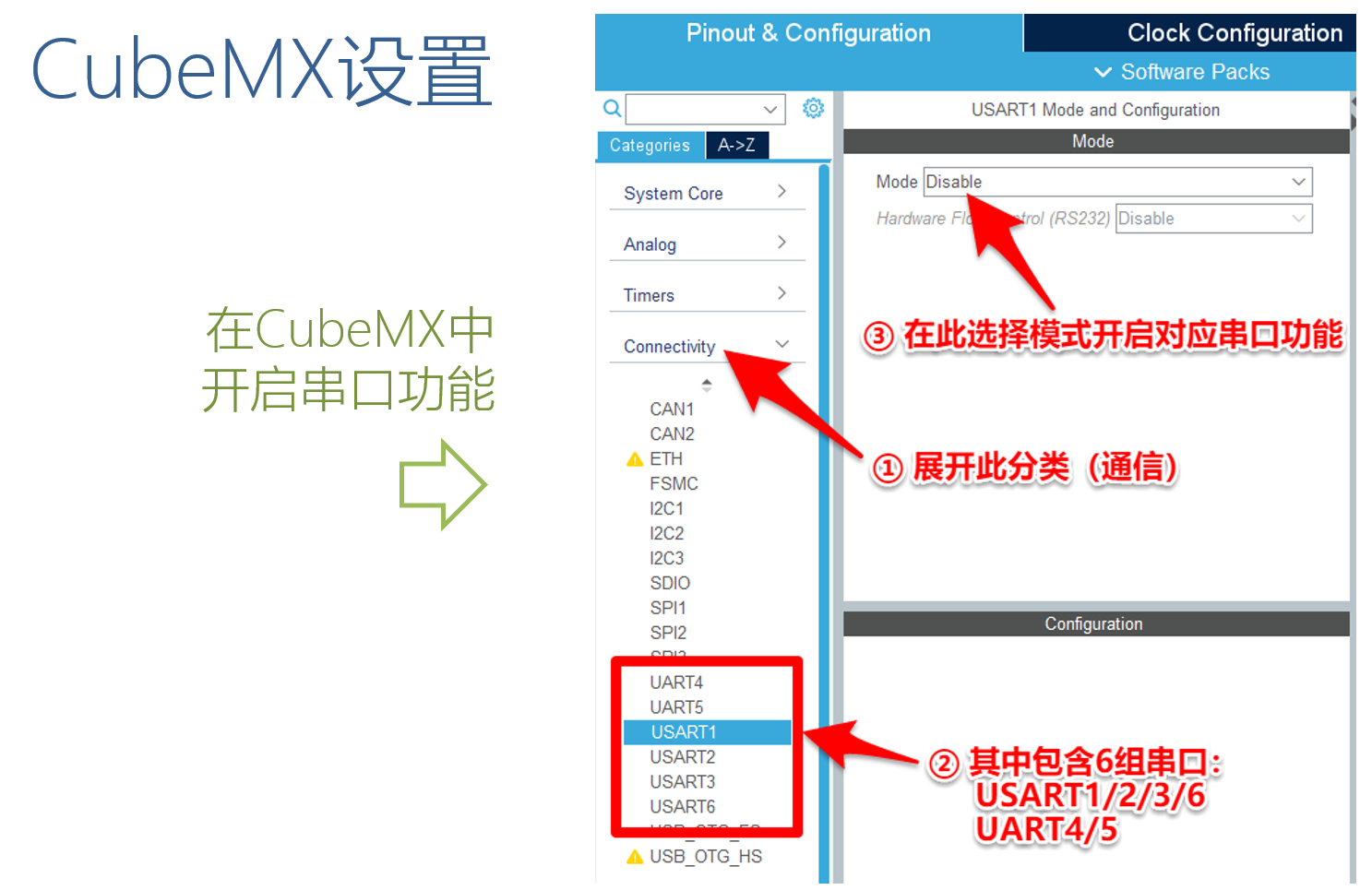
2.3 USART串口配置
选择左侧的Connecttivity选项,点击USART1,如下图所示,点击Mode开始配置
STM32对USART模块提供了下面的这些模式,根据需求选择相应模式,本项目选择的是异步模式Asynchronous。
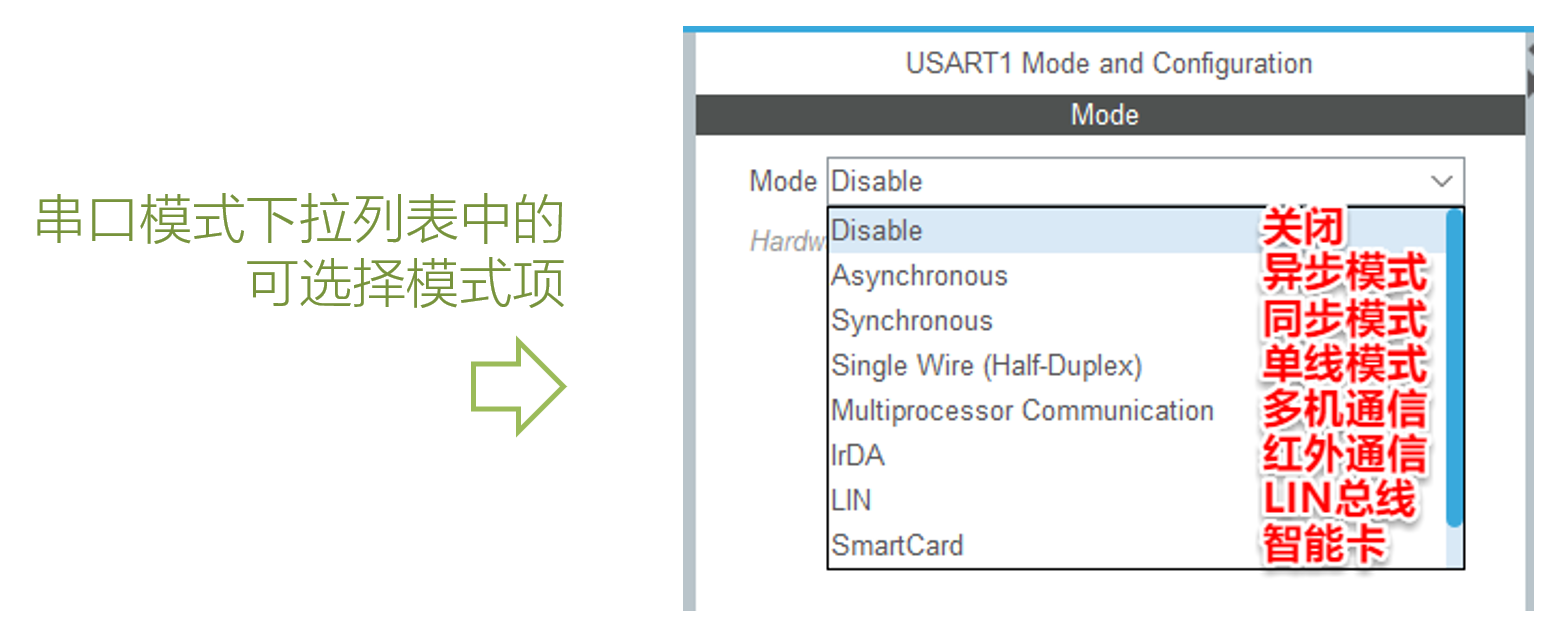
下面我们来对USART进行配置,首先开发板上的串口对应的USART1串口,Mode配置为异步模式Asynchronous,STMCubeMX会自动分配引脚,目前分配的USART1_RX对于PA10,USART1_TX对于PA9,和我们开发板的引脚正好对应,如果不对应的话,可以根据芯片的data Sheet改成相应的引脚。
下面的参数配置Parameter Settings按照默认配置来,波特率为 115200 bit/s,这里确保主从机是一致的,才能通信成功,数据位 8,无校验位,停止位1,数据方向:Receive and Transmit,采样:16.

点击下方的GPIO Settings,可以看到为USART1自动分配的默认引脚

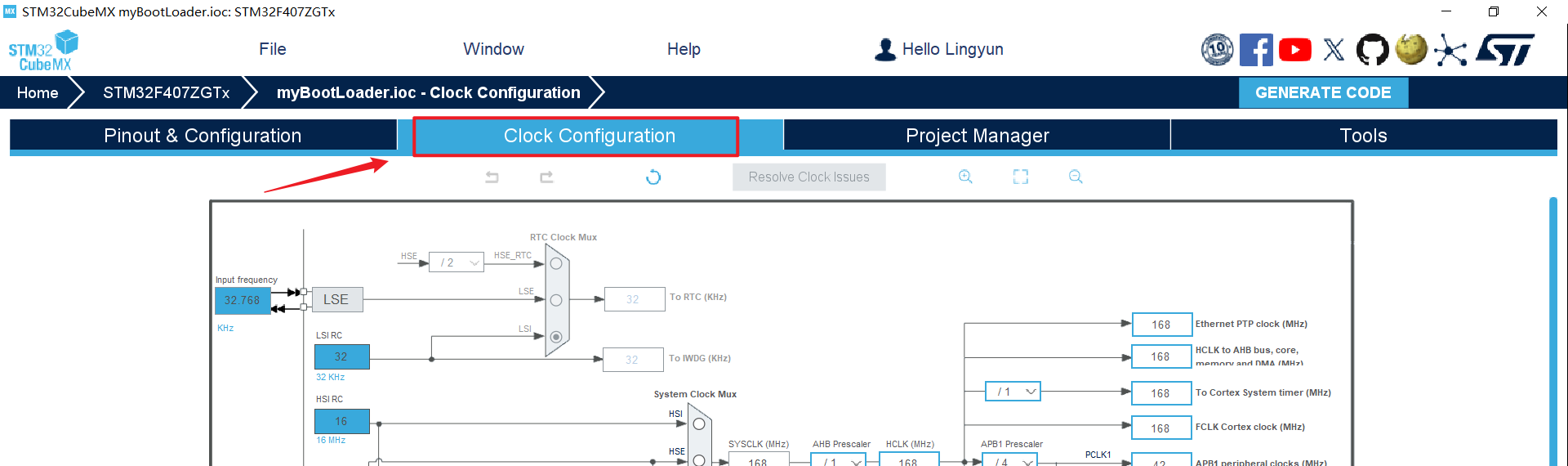
2.4 时钟树配置
点击上方的Clock Configuration,开始配置时钟
下面我们来看一下时钟树的结构,如下图所示
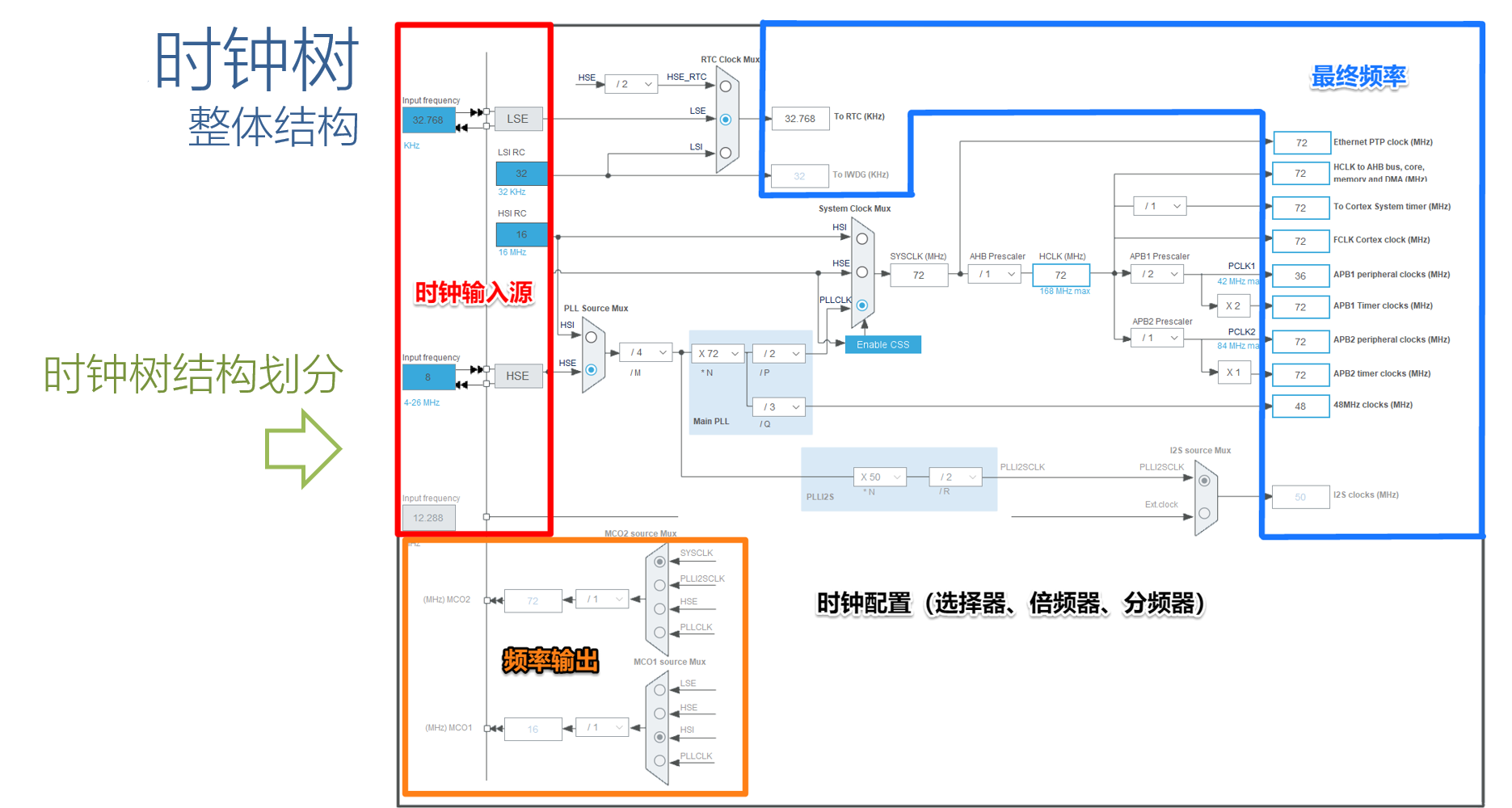
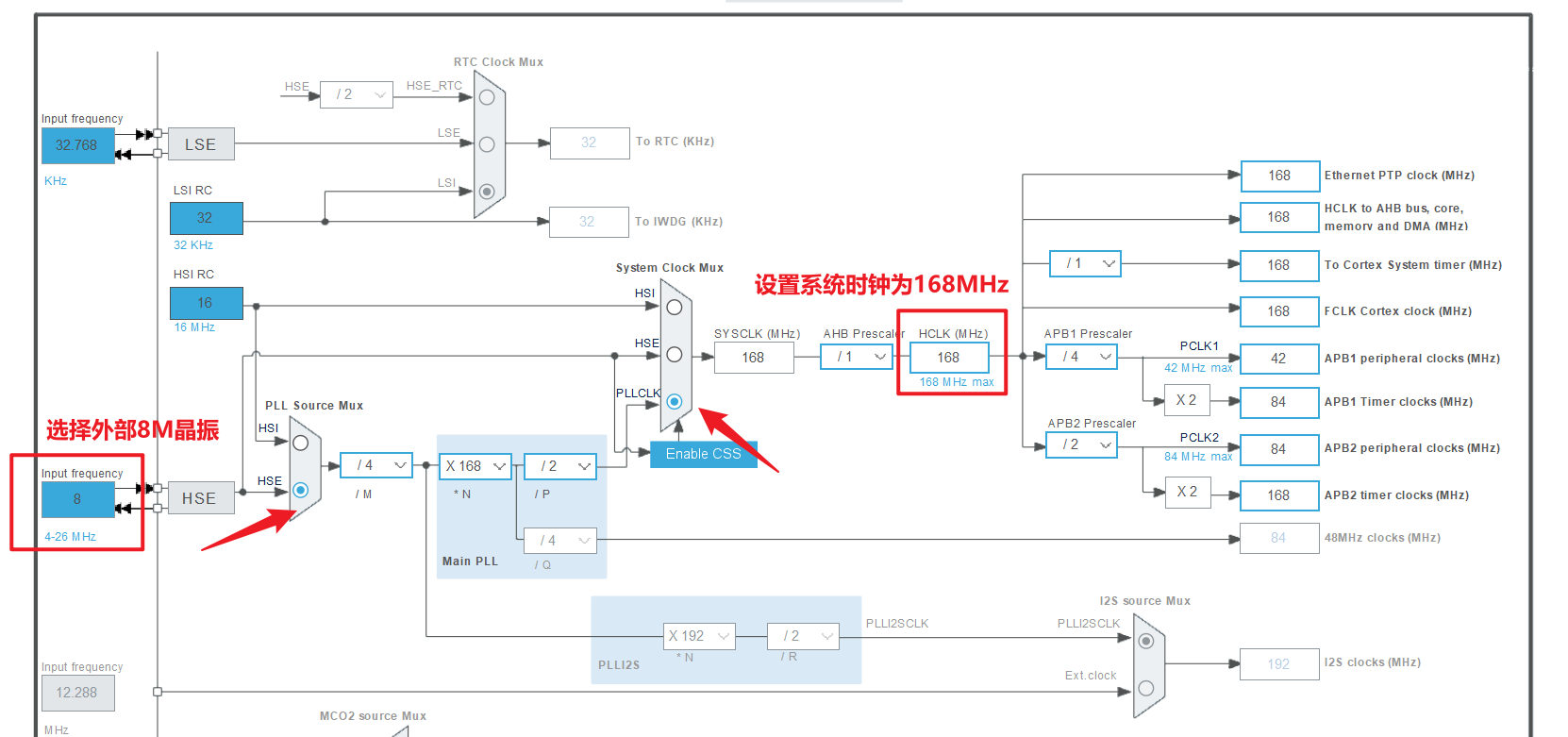
现在开始配置开发板相关的时钟频率,首先选择做左边的Input frequency,选择外部8M的晶振,选择HSE,选择PLLCLK,在HCLK处将时钟敲定为168MHz,即STM32F407可支持的最大时钟频率
2.5 工程导出设置
如下图所示,设置工程
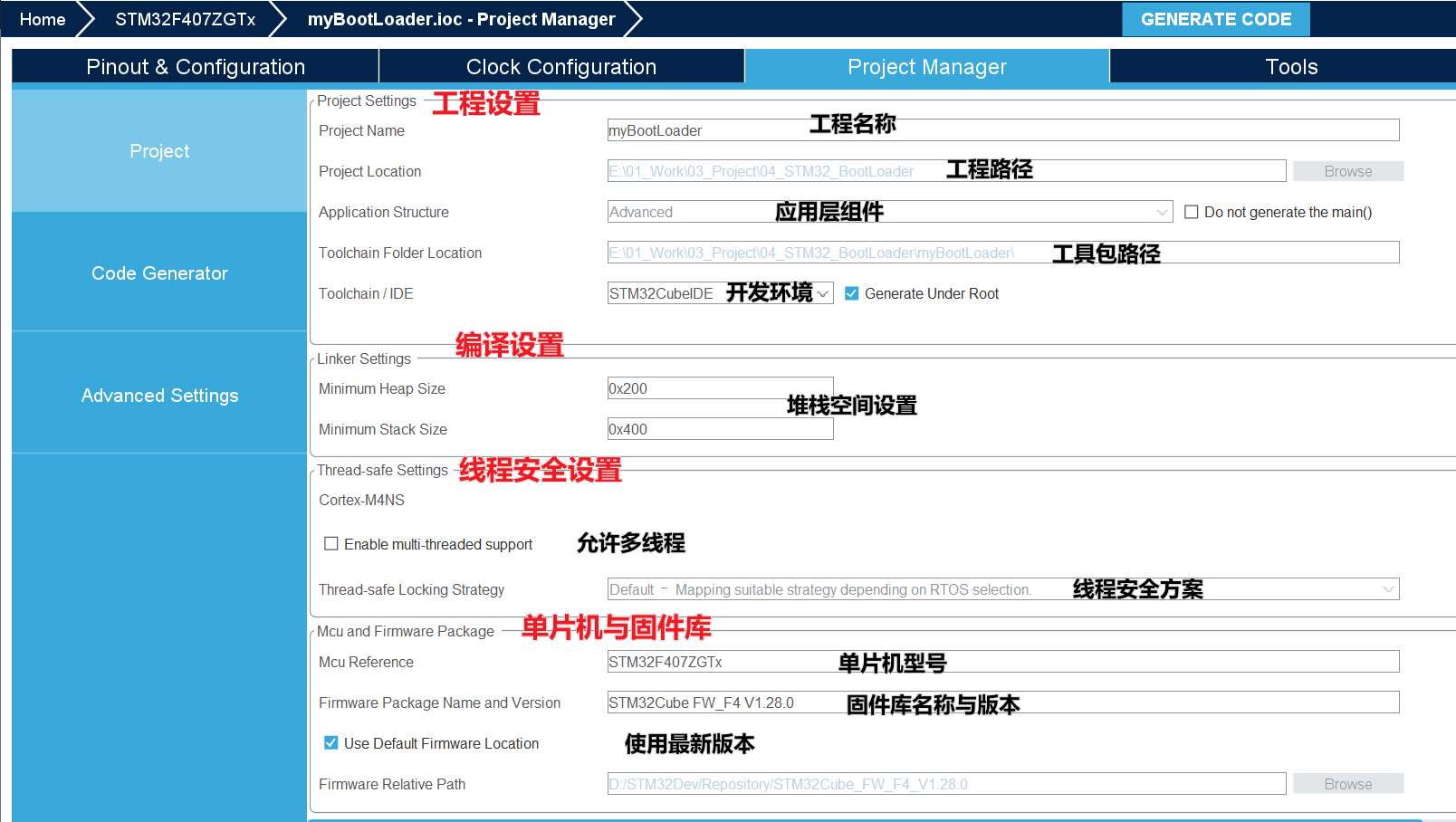
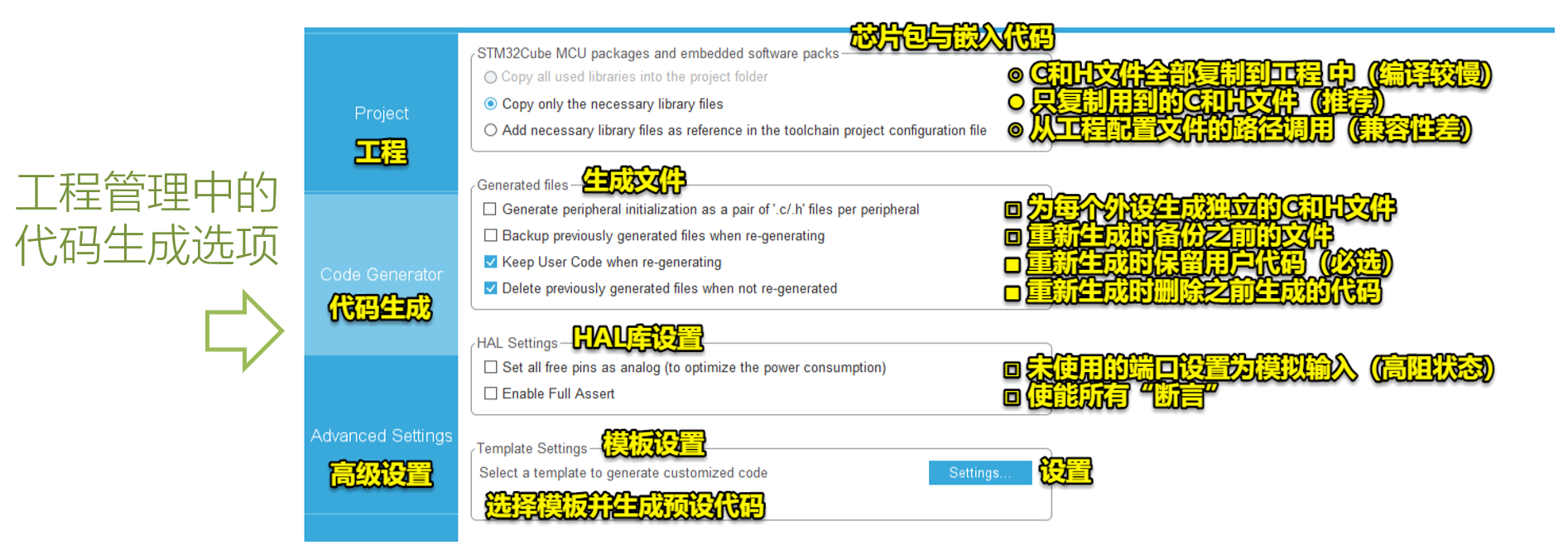
代码生成设置
高级设置Advanced Settings

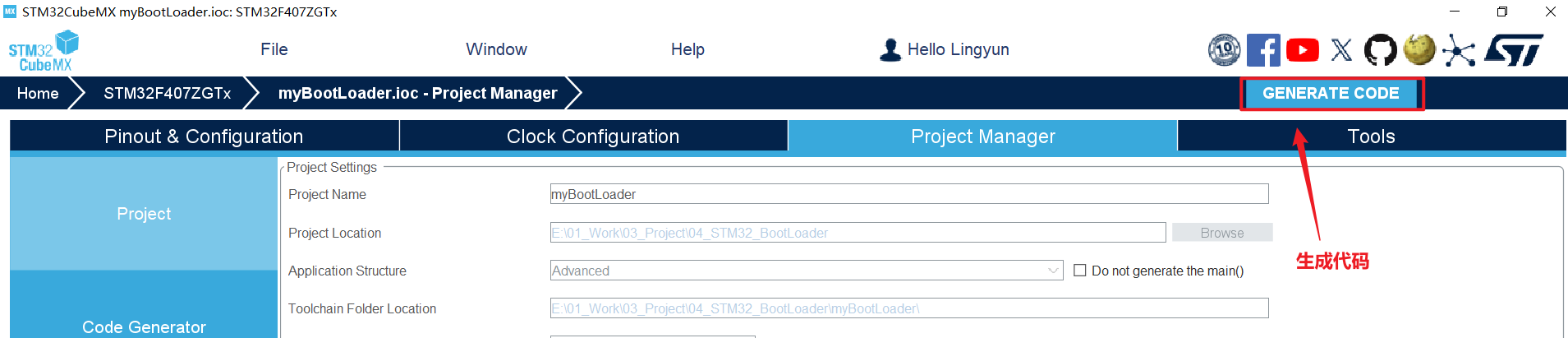
点击右上角,生成代码GENERATE CODE
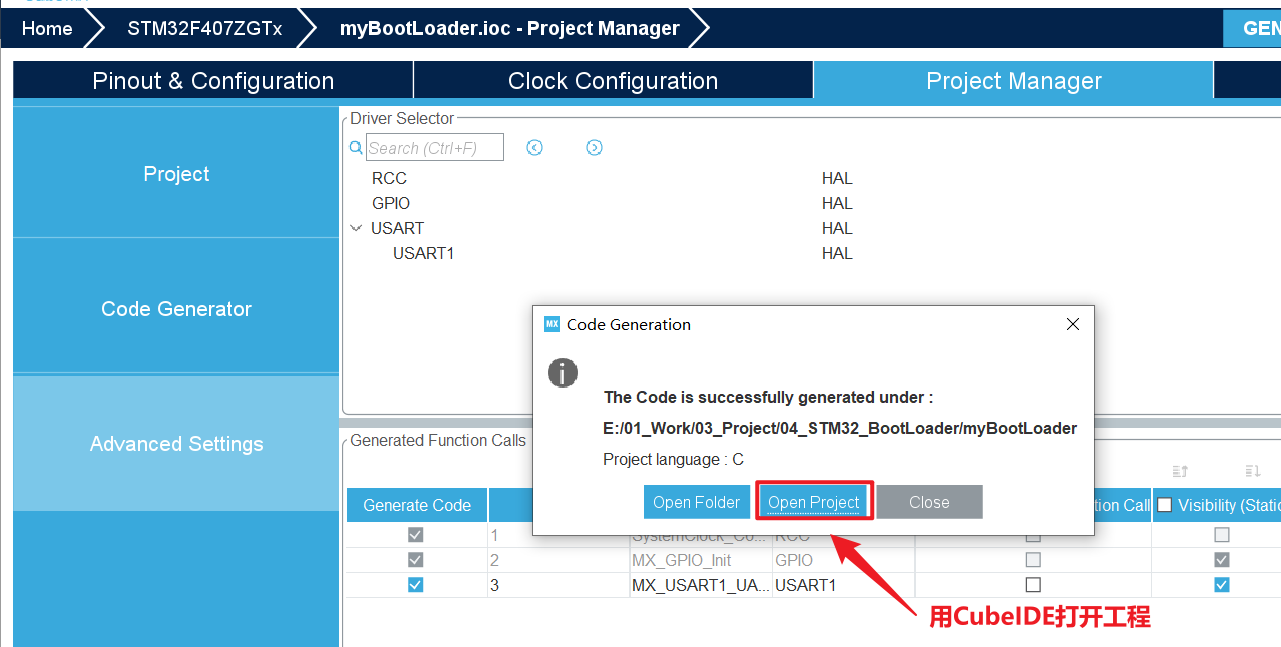
点击Open Project,本项目是使用STM32CubeIDE作为集成开发环境,做到编译和调试代码的工具
3. 代码编写
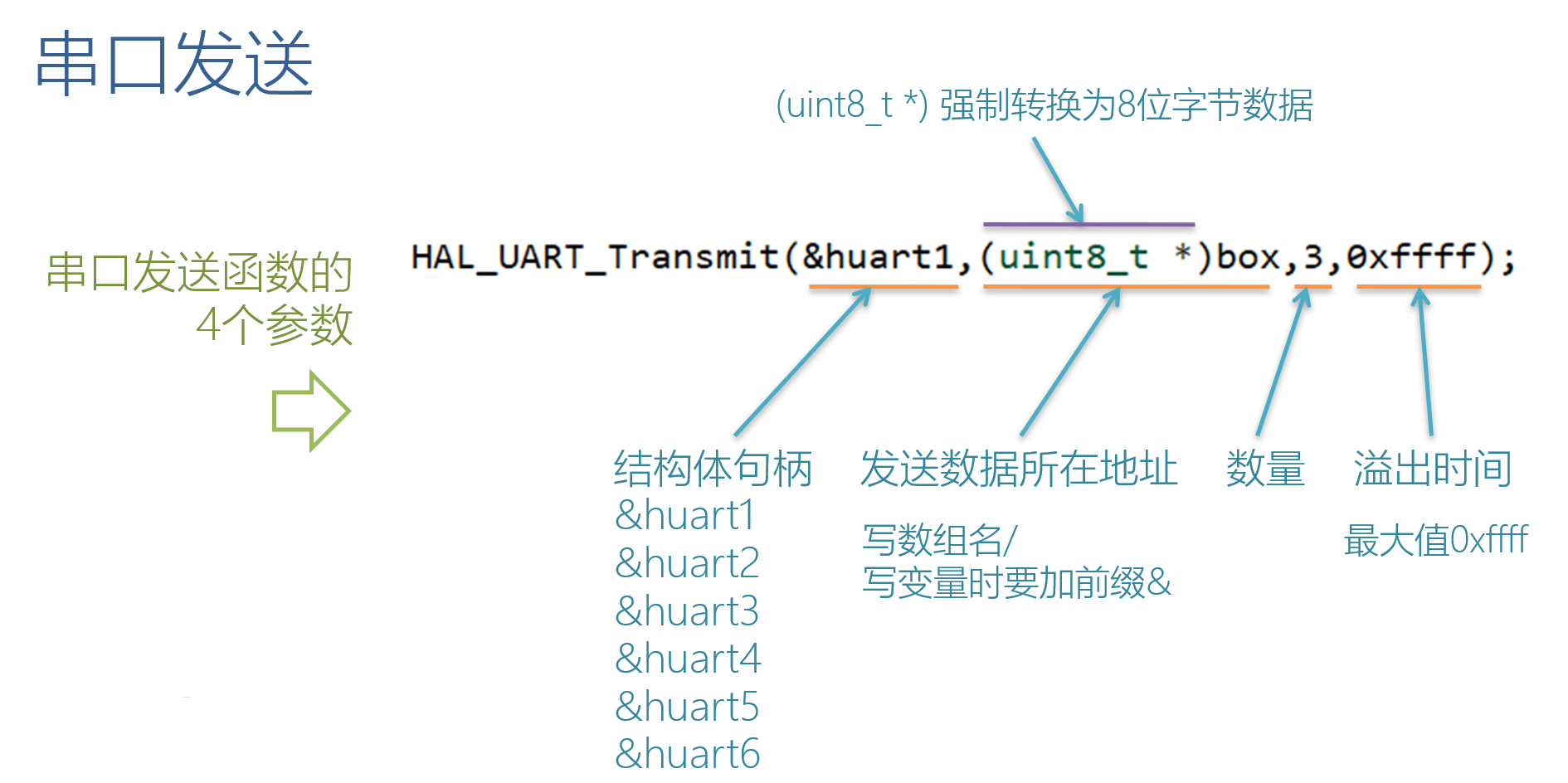
我们目前使用的是Hal库进行的工程实现,如下图所示,是串口轮询发送函数HAL_UART_Transmit(),在发送的过程中,会一直在该函数中进行发送,是Polling Mode。
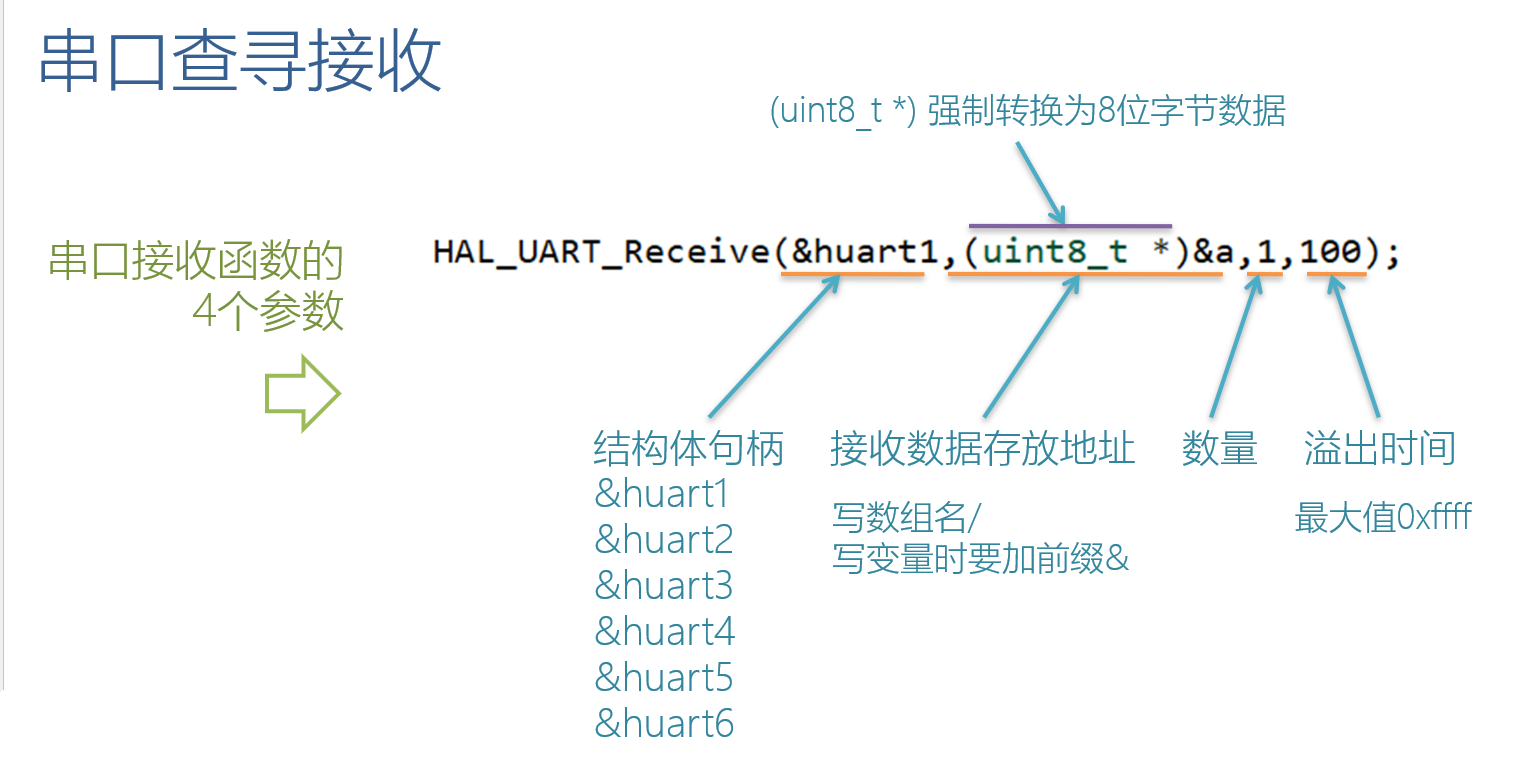
下图是串口接收函数 HAL_UART_Receive(),也是Polling Mode,在接收数据的过程中,CPU无法被抢占,一直需要等到数据被发送完成后才可退出该函数
下面是在main.c中的代码实现:
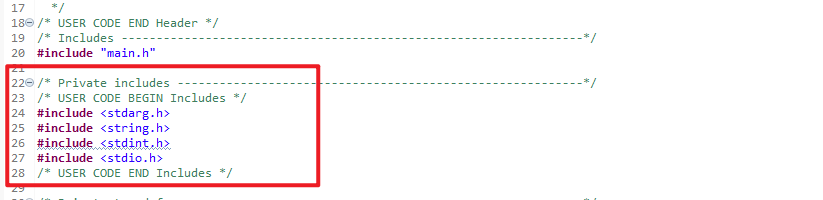
引用c标准头文件
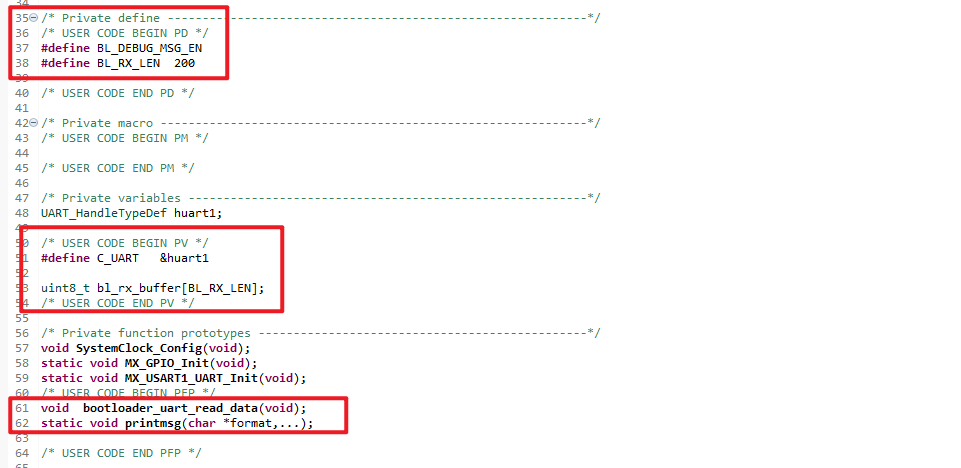
宏定义,BL_DEBUG_MSG_EN是为调试用的,重定义huart1,设置数据bl_rx_buffer
在main()函数中调用bootloader_uart_read_data()函数进行数据接收和发送
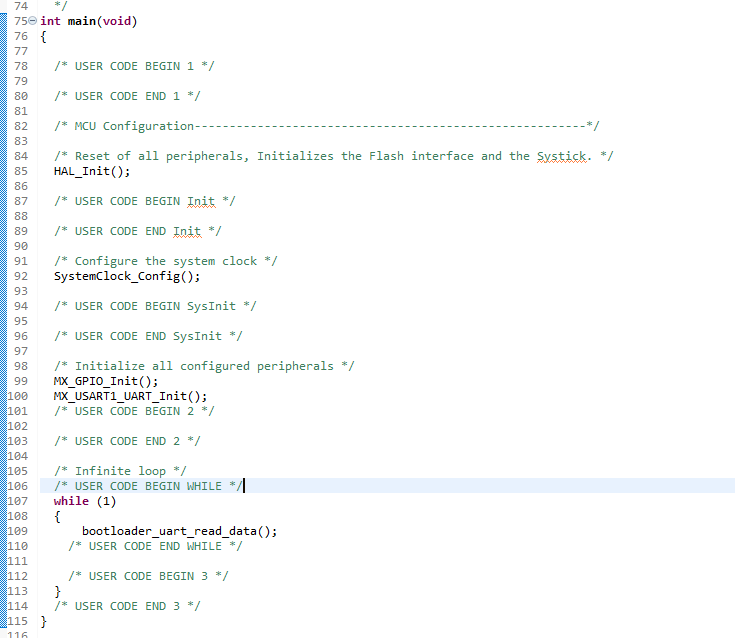
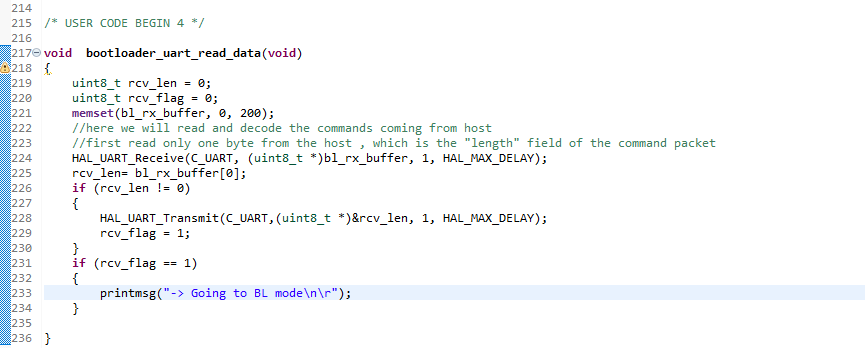
bootloader_uart_read_data()函数中先接收在发送。
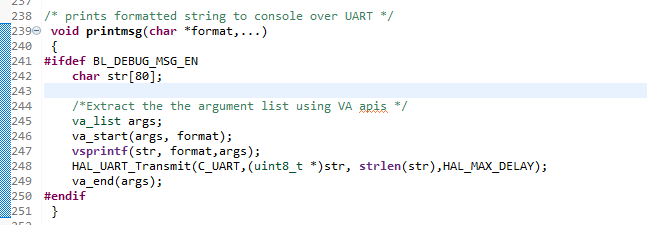
printmsg()打印数据函数实现。
下面是main.c的完整代码:
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2024 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdarg.h>
#include <string.h>
#include <stdint.h>
#include <stdio.h>
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define BL_DEBUG_MSG_EN
#define BL_RX_LEN 200/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart1;/* USER CODE BEGIN PV */
#define C_UART &huart1uint8_t bl_rx_buffer[BL_RX_LEN];
/* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP */
void bootloader_uart_read_data(void);
static void printmsg(char *format,...);/* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){bootloader_uart_read_data();/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage*/__HAL_RCC_PWR_CLK_ENABLE();__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 4;RCC_OscInitStruct.PLL.PLLN = 168;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = 4;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK){Error_Handler();}
}/*** @brief USART1 Initialization Function* @param None* @retval None*/
static void MX_USART1_UART_Init(void)
{/* USER CODE BEGIN USART1_Init 0 *//* USER CODE END USART1_Init 0 *//* USER CODE BEGIN USART1_Init 1 *//* USER CODE END USART1_Init 1 */huart1.Instance = USART1;huart1.Init.BaudRate = 115200;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;huart1.Init.Mode = UART_MODE_TX_RX;huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart1.Init.OverSampling = UART_OVERSAMPLING_16;if (HAL_UART_Init(&huart1) != HAL_OK){Error_Handler();}/* USER CODE BEGIN USART1_Init 2 *//* USER CODE END USART1_Init 2 */}/*** @brief GPIO Initialization Function* @param None* @retval None*/
static void MX_GPIO_Init(void)
{
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 *//* GPIO Ports Clock Enable */__HAL_RCC_GPIOC_CLK_ENABLE();__HAL_RCC_GPIOH_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}/* USER CODE BEGIN 4 */void bootloader_uart_read_data(void)
{uint8_t rcv_len = 0;uint8_t rcv_flag = 0;memset(bl_rx_buffer, 0, 200);//here we will read and decode the commands coming from host//first read only one byte from the host , which is the "length" field of the command packetHAL_UART_Receive(C_UART, (uint8_t *)bl_rx_buffer, 1, HAL_MAX_DELAY);rcv_len= bl_rx_buffer[0];if (rcv_len != 0){HAL_UART_Transmit(C_UART,(uint8_t *)&rcv_len, 1, HAL_MAX_DELAY);rcv_flag = 1;}if (rcv_flag == 1){printmsg("-> Going to BL mode\n\r");}}/* prints formatted string to console over UART */void printmsg(char *format,...){
#ifdef BL_DEBUG_MSG_ENchar str[80];/*Extract the the argument list using VA apis */va_list args;va_start(args, format);vsprintf(str, format,args);HAL_UART_Transmit(C_UART,(uint8_t *)str, strlen(str),HAL_MAX_DELAY);va_end(args);
#endif}/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
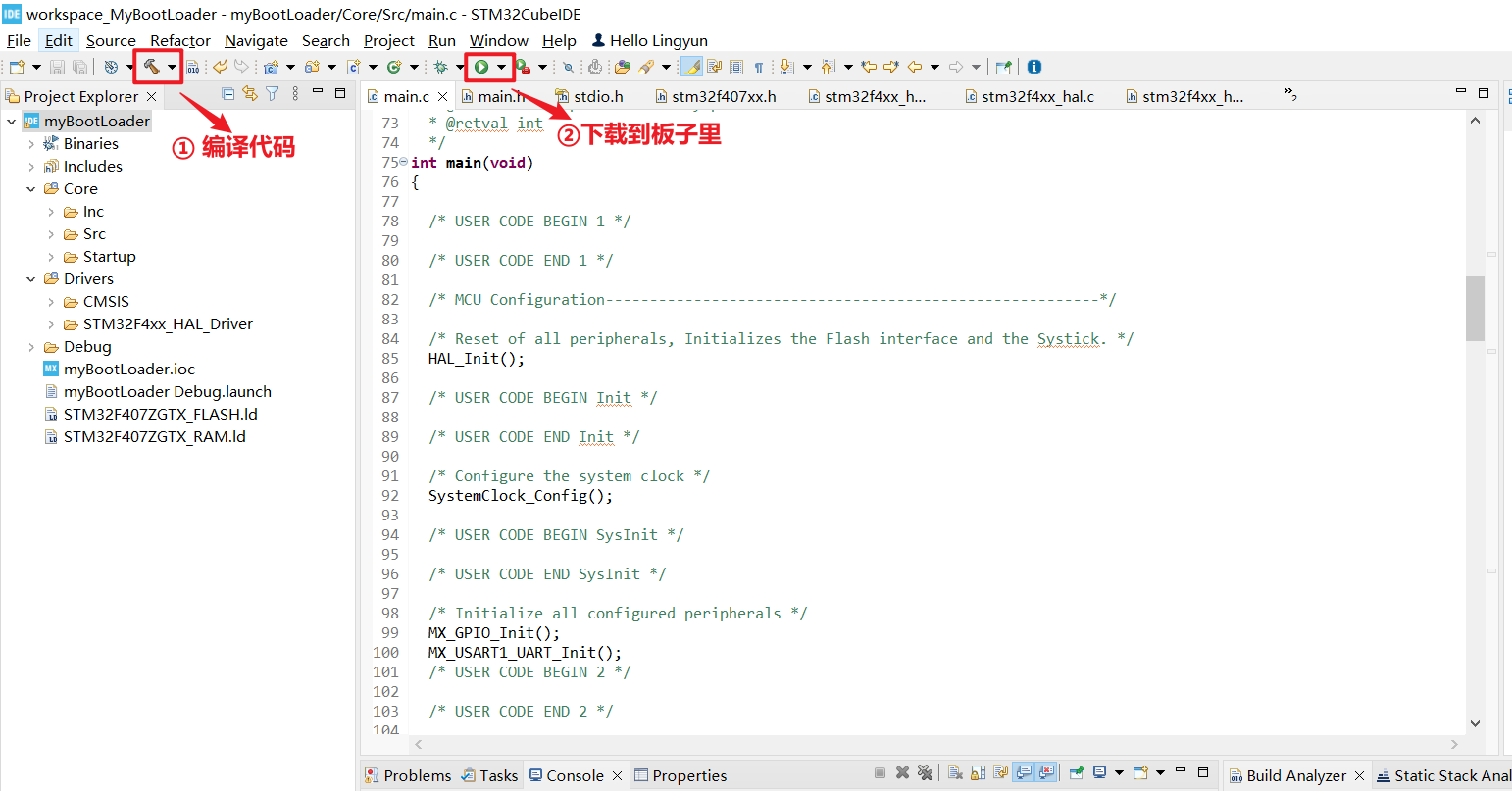
#endif /* USE_FULL_ASSERT */4. 工程下载和调试
将工程编译,之后下载到板子中。
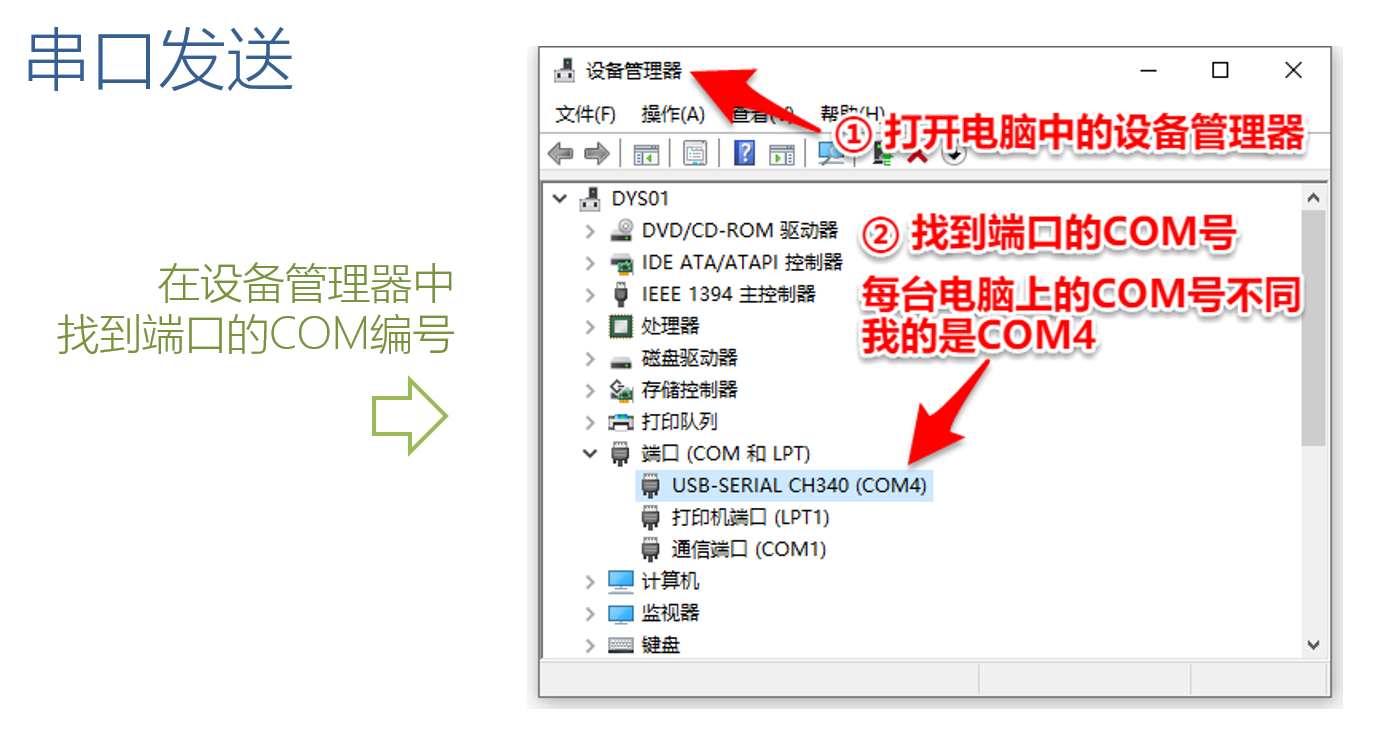
打开设备管理器,查看串口的端口号COM
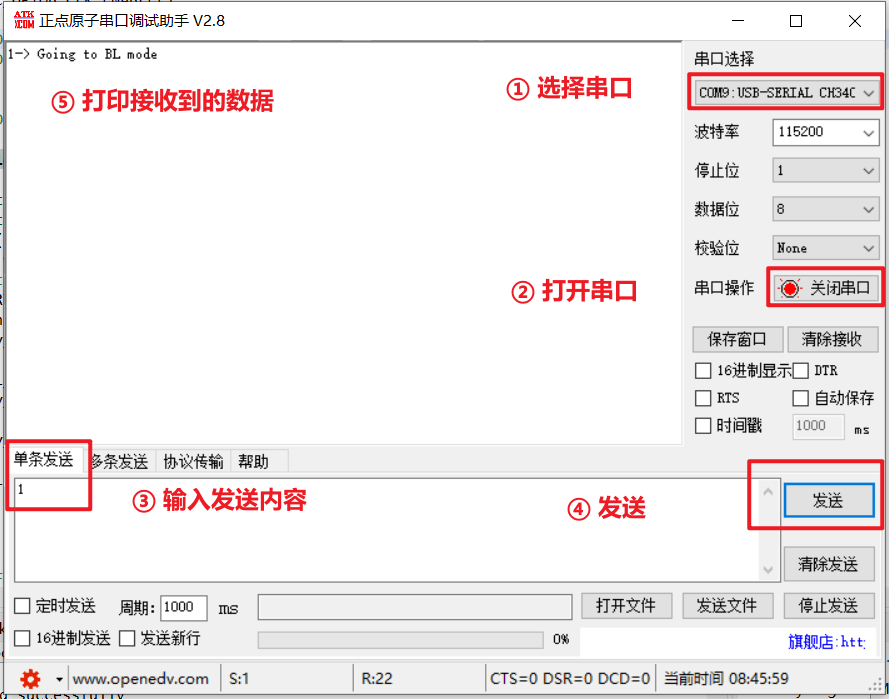
打开正点原子的串口调试助手,选择刚才设备管理器中串口的COM号,波特率设置为115200,其他默认,打开串口,随便发送一个数据,开发板接收到这个数据,都会原封不动的将该数据打印出来,然后在执行打印Going to BL mode,说明能够接收并发送数据,至此,我们开发Customer BootLoader的第一步,最小工程代码已经搭建完成,后续我们进行上位机与开发板之间的通信协议开发。
如果大家有什么疑问,请随时私信联系我。
相关文章:
STM32 Customer BootLoader 刷新项目 (一) STM32CubeMX UART串口通信工程搭建
STM32 Customer BootLoader 刷新项目 (一) STM32CubeMX UART串口通信工程搭建 文章目录 STM32 Customer BootLoader 刷新项目 (一) STM32CubeMX UART串口通信工程搭建功能与作用典型工作流程 1. 硬件原理图介绍2. STM32 CubeMX工程搭建2.1 创建工程2.2 系统配置2.3 USART串口配…...

如果搜索一定超时,如何用dp来以空间换时间
E - Alphabet Tiles (atcoder.jp) 题目大意:1到k长度的字符串时,在A-Z给定数量下,搭配出多少种不同的字符串 思路 排列组合,会死人的 暴搜:可以解决,但是时间太长 dp:考虑前 i 个字母&…...

MySQL常见的命令
MySQL常见的命令 查看数据库(注意添加分号) show databases;进入到某个库 use 库; 例如:进入test use test;显示表格 show tables;直接展示某个库里面的表 show tables from 库; 例如:展示mysql中的表格 show tabl…...

11 类型泛化
11 类型泛化 1、函数模版1.1 前言1.2 函数模版1.3 隐式推断类型实参1.4 函数模板重载1.5 函数模板类型形参的默认类型(C11标准) 2、类模版2.1 类模板的成员函数延迟实例化2.2 类模板的静态成员2.3 类模板的递归实例化2.4 类模板类型形参缺省值 3、类模板…...
UE4_后期_ben_模糊和锐化滤镜
学习笔记,不喜勿喷,侵权立删,祝愿生活越来越好! 本篇教程主要介绍后期处理的简单模糊和锐化滤镜效果,学习之前首先要回顾下上节课介绍的屏幕扭曲效果: 这是全屏效果,然后又介绍了几种蒙版&#…...

Spring Boot中Excel的导入导出的实现之Apache POI框架使用教程
文章目录 前言一、Apache POI 是什么?二、使用 Apache POI 实现 Excel 的导入和导出① 导入 Excel1. 添加依赖2. 编写导入逻辑3. 在 Controller 中处理上传请求 ② 导出 Excel1. 添加依赖2. 编写导出逻辑3. 在 Controller 中处理导出请求 总结 前言 在 Spring Boot …...

CentOS搭建kubernetes集群详细过程(yum安装方式)
kubernetes集群搭建详细过程(yum安装方式) Kubernetes,也被称为K8s,是一个多功能的容器管理工具,它不仅能够协调和调度容器的部署,而且还能监控容器的健康状况并自动修复常见问题。这个平台是在谷歌十多年…...

Java 面试题:Java 的 Exception 和 Error 有什么区别?
在Java编程中,异常处理是确保程序稳健性和可靠性的重要机制。Java提供了一套完善的异常处理框架,通过捕获和处理异常,开发者可以有效地应对程序运行时可能出现的各种问题。在这一框架中,Exception和Error是两个核心概念࿰…...

在Vue 3中,el-select循环el-option的常见踩坑点,value值绑定对象类型?选中效果不准确?
在Vue 3中,el-select 组件是来自 Element Plus UI 库的一部分。 如果你想要设置默认选中的选项,你可以使用 v-model 来绑定选中的值。如果你想要在某个时刻让某个选项显示为已选中,可以设置对应的值到 v-model 绑定的数据。 <template>…...

Qt实现单例模式:Q_GLOBAL_STATIC和Q_GLOBAL_STATIC_WITH_ARGS
目录 1.引言 2.了解Q_GLOBAL_STATIC 3.了解Q_GLOBAL_STATIC_WITH_ARGS 4.实现原理 4.1.对象的创建 4.2.QGlobalStatic 4.3.宏定义实现 4.4.注意事项 5.总结 1.引言 设计模式之单例模式-CSDN博客 所谓的全局静态对象,大多是在单例类中所见,在之前…...
通过nginx转发后应用偶发502bad gateway
序言 学习了一些东西,如何才是真正自己能用的呢?好像就是看自己的潜意识的反应,例如解决了一个问题,那么下次再碰到类似的问题,能直接下意识的去找到对应的信息,从而解决,而不是和第一次碰到一样…...

linux中如何进行yum源的挂载
linux中如何进行yum源的挂载 1.首先创建目录[rootserver /]# mkdir /rhel92.使用mount命令进行、dev/cdrom/的镜像文件进行挂载[rootserver /]# mount /dev/cdrom /rhel9/ 注意:此时设立的是临时命令。重启后则失效,若想在下次开启后仍然挂载&a…...

ffmpeg的部署踩坑及简单使用方式
ffmpeg的使用方式有以下几种: 使用原生安装包 直接在ffmpeg官网上下载安装该软件,加入到环境变量中就可以使用了 优点:简单,灵活,代码中也不用添加其他第三方的包 缺点:需要手动安装ffmpeg,这点比较麻烦 部署-windows 在windows环境下,有时就算加入到了环境变量,…...
misc刷题记录2[陇剑杯 2021]
[陇剑杯 2021]webshell (1)单位网站被黑客挂马,请您从流量中分析出webshell,进行回答: 黑客登录系统使用的密码是_____________。得到的flag请使用NSSCTF{}格式提交。 这里我的思路是,既然要选择的时间段是黑客登录网站以后&…...

AI发展面临的问题? —— AI对创造的重新定义
一、AI的问题描述 AI与数据安全问题:随着AI技术的发展和应用,数据安全问题日益突出。AI模型训练依赖于大量数据,而这些数据中可能包含个人隐私、商业秘密等敏感信息。如果数据在采集、存储、使用过程中处理不当,可能导致数据泄露或…...
k8s学习--OpenKruise详细解释以及原地升级及全链路灰度发布方案
文章目录 OpenKruise简介OpenKruise来源OpenKruise是什么?核心组件有什么?有什么特性和优势?适用于什么场景? 什么是OpenKruise的原地升级原地升级的关键特性使用原地升级的组件原地升级的工作原理 应用环境一、OpenKruise部署1.安…...

上海亚商投顾:沪指缩量调整 PCB概念股持续爆发
上海亚商投顾前言:无惧大盘涨跌,解密龙虎榜资金,跟踪一线游资和机构资金动向,识别短期热点和强势个股。 一.市场情绪 大小指数昨日走势分化,沪指全天震荡调整,创业板指午后涨超1%。消费电子板块全天强势&a…...
QT属性系统,简单属性功能快速实现 QT属性的简单理解 属性学习如此简单 一文就能读懂QT属性 QT属性最简单的学习
4.4 属性系统 Qt 元对象系统最主要的功能是实现信号和槽机制,当然也有其他功能,就是支持属性系统。有些高级语言通过编译器的 __property 或者 [property] 等关键字实现属性系统,用于提供对成员变量的访问权限,Qt 则通过自己的元对…...
【IEEE出版丨EI检索】2024新型电力系统与电力电子国际会议(NPSPE 2024)
2024新型电力系统与电力电子国际会议(NPSPE 2024)将于8月16日至18日在中国大连举行,本届大会致力于为相关领域的专家和学者提供一个探讨行业热点问题,促进科技进步,增加科研合作的平台。本届大会涵盖新型电力系统和电力…...
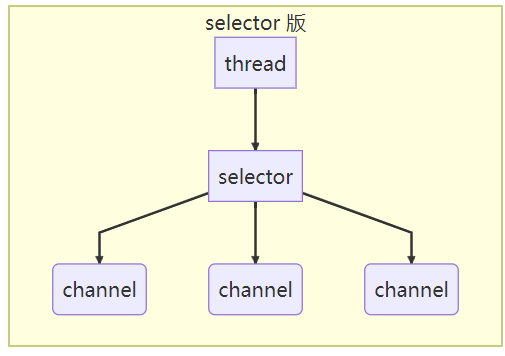
【Netty】nio阻塞非阻塞Selector
阻塞VS非阻塞 阻塞 阻塞模式下,相关方法都会导致线程暂停。 ServerSocketChannel.accept() 会在没有建立连接的时候让线程暂停 SocketChannel.read()会在没有数据的时候让线程暂停。 阻塞的表现就是线程暂停了,暂停期间不会占用CPU,但线程…...

3大突破性功能:如何用QtScrcpy彻底改变你的Android投屏体验
3大突破性功能:如何用QtScrcpy彻底改变你的Android投屏体验 【免费下载链接】QtScrcpy Android real-time display control software 项目地址: https://gitcode.com/GitHub_Trending/qt/QtScrcpy 你是否曾经为了在电脑上操作手机而烦恼?无论是游…...

AI智能体生态的包管理器:agenticmarket-cli 设计与实践
1. 项目概述:一个面向AI智能体生态的命令行工具如果你和我一样,长期在AI智能体(Agent)这个领域里折腾,那你肯定经历过这样的场景:为了测试一个最新的开源智能体框架,你需要先找到它的GitHub仓库…...

抖音批量下载神器:5分钟学会免费高效下载视频、音乐和直播
抖音批量下载神器:5分钟学会免费高效下载视频、音乐和直播 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback s…...

3个高效方法:免费获取百度网盘高速下载直链的完整指南
3个高效方法:免费获取百度网盘高速下载直链的完整指南 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 当我们面对百度网盘缓慢的下载速度时,常常感到无…...

C语言结构体、枚举、联合体:从内存布局看区别,新手避坑指南
C语言结构体、枚举、联合体:从内存布局看区别,新手避坑指南 在C语言开发中,结构体、枚举和联合体是构建复杂数据模型的三大基石。但很多开发者在实际项目中常遇到这样的困惑:为什么结构体占用的内存比预期大?枚举变量在…...

激光切割外壳设计全流程:从创客工具到产品级制造的实战指南
1. 项目概述:为什么选择激光切割来做外壳?如果你和我一样,捣鼓过不少电子项目,从简单的Arduino温湿度计到复杂的树莓派家庭服务器,那你一定为“给它们找个家”这件事头疼过。3D打印太慢,开模注塑成本又高得…...

如何免费高效优化电脑性能:UXTU终极调优指南
如何免费高效优化电脑性能:UXTU终极调优指南 【免费下载链接】Universal-x86-Tuning-Utility Unlock the full potential of your Intel/AMD based device. 项目地址: https://gitcode.com/gh_mirrors/un/Universal-x86-Tuning-Utility Universal x86 Tuning…...

Qdrant客户端库实战:从向量数据库连接到生产级应用开发
1. 项目概述:从向量数据库到应用落地的桥梁如果你最近在折腾大模型应用,或者想给自己的产品加上一个“智能大脑”,那你大概率绕不开一个词:向量数据库。简单来说,它就像一个能理解“意思”的超级搜索引擎,不…...

模拟电路布局优化:多智能体强化学习实践
1. 模拟电路布局优化的挑战与机遇在集成电路设计领域,模拟电路布局一直是个令人头疼的问题。作为一名从业十余年的模拟电路设计师,我深刻体会到传统布局方法在面对现代工艺挑战时的局限性。每次手工调整晶体管位置时,那种"差之毫厘&…...

VS Code光标主题定制指南:提升开发效率与视觉舒适度
1. 项目概述:一个为开发者量身定制的光标主题集合如果你和我一样,每天有超过8个小时的时间是在代码编辑器里度过的,那么你一定对那个在屏幕上闪烁的光标再熟悉不过了。它不仅仅是文本插入点,更是我们思维在数字世界中的延伸。然而…...