对yoloV8进行标签过滤来实现行人检测
前言
上一章我们介绍的通过迁移学习,在新的行人数据集上使用已经学习到的特征和权重,从而更快地实现行人检测任务。模型就会调整其参数以适应新的数据集,以提高对行人的识别性能。接下来介绍一种更快更便捷的方法,依旧是基于yolov8。
标签过滤方法
在这种方法中,不对模型进行重新训练,而是在模型输出的基础上,通过筛选、过滤标签来达到特定的识别目标。以下详细介绍这种方法:
1.模型输出: 首先使用一个预训练好的目标检测模型来对图像进行检测。
这些模型已经在大型数据集上进行了训练,学习到了各种不同类别的目标的特征。
2.目标标签过滤: 接下来,从模型的输出结果中提取目标的标签信息。这些标签通常包含了检测到的目标类别(如人、车、狗等)、位置(边界框坐标)、置信度分数等信息。
3.选择感兴趣的类别: 在标签过滤的过程中,根据任务需求选择感兴趣的目标类别。例如,只对行人感兴趣,您可以只保留标签为“行人”的目标检测结果,而过滤掉其他类别的目标。
4.阈值处理: 除了选择感兴趣的类别外,还可以根据置信度分数来进行阈值处理。通常情况下,模型会为每个检测到的目标分配一个置信度分数,表示该目标存在的概率。您可以根据设定的阈值来过滤掉低置信度的检测结果,以确保只保留可信度较高的目标。
5.结果可视化或保存: 最后,将经过标签过滤处理后的目标检测结果进行可视化或保存。通常,可以将过滤后的结果在图像或视频中标注出来,以便后续分析或应用。
完整的demo
只需要运行这段推理脚本即可。
import cv2
from ultralytics import YOLO
# 加载YOLOv8模型
model = YOLO('yolov8n.pt') # 你可以选择其他模型,例如yolov8s.pt, yolov8m.pt等
image_path = 'test-img/ms.jpg' # 替换为你的图像路径
image = cv2.imread(image_path)
# 使用模型进行检测
results = model(image)
# 筛选出标签为"person"的检测结果(COCO数据集中,类别0通常为'person')
person_results = [result for result in results[0].boxes if result.cls[0] == 0]
# 绘制检测到的"person"的边界框
for box in person_results:x1, y1, x2, y2 = map(int, box.xyxy[0])confidence = box.conf[0]label = f"person {confidence:.2f}"cv2.rectangle(image, (x1, y1), (x2, y2), (0, 0, 255), 3)cv2.putText(image, label, (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 255), 4)
# 保存结果图像
output_path_person_only = 'person_only_detected_image1.jpg'
cv2.imwrite(output_path_person_only, image)
print(f"检测结果已保存到 {output_path_person_only}")
原始检测结果

标签过滤后的检测结果

两种方法的区别
迁移学习优缺点:
优点:
- 目标定制化: 重新训练模型可以针对特定的任务和数据集进行优化,可以更好地满足特定需求,提高模型性能和准确性。
- 灵活性: 可以调整模型架构、超参数和训练策略,以适应不同的数据特征和应用场景,具有更大的灵活性。
- 更适应新任务: 重新训练模型可以使其更适应新的目标类别、背景和环境变化,提高泛化能力和适应性。
缺点:
- 时间和资源消耗: 需要花费大量时间和计算资源来重新训练模型,特别是对于大型数据集和复杂模型而言。
- 数据标注需求: 需要大量标注好的数据集来进行重新训练,标注过程可能耗时耗力。
- 潜在过拟合: 重新训练模型可能会导致过度拟合于新数据集,特别是当新数据集相对较小或与原始数据集有显著差异时
过滤标签的优缺点:
优点:
- 简单快速: 只需要对已有模型的输出进行简单的标签过滤,不需要重新训练模型,过程简单快速。
- 资源消耗低: 不需要重新分配大量的计算资源和时间,适用于资源有限或时间紧迫的情况。
- 保留原模型特性: 可以保留原始模型在大型数据集上学到的丰富特征和知识,避免了重新训练可能带来的性能下降。
缺点:
- 限制性: 受限于原始模型在预训练数据集上学习到的特征和知识,可能无法很好地适应新任务和数据集,性能可能受限。
- 无法完全定制化: 无法对模型架构和参数进行定制化调整,可能无法满足特定需求。
- 可能导致误差传播: 对于一些复杂的数据集和场景,简单的标签过滤可能会导致误差传播,影响最终的检测性能。
总结
没有最好的方法,只有最合适的方法。
相关文章:
对yoloV8进行标签过滤来实现行人检测
前言 上一章我们介绍的通过迁移学习,在新的行人数据集上使用已经学习到的特征和权重,从而更快地实现行人检测任务。模型就会调整其参数以适应新的数据集,以提高对行人的识别性能。接下来介绍一种更快更便捷的方法,依旧是基于yolo…...

论文阅读笔记:Towards Higher Ranks via Adversarial Weight Pruning
论文阅读笔记:Towards Higher Ranks via Adversarial Weight Pruning 1 背景2 创新点3 方法4 模块4.1 问题表述4.2 分析高稀疏度下的权重剪枝4.3 通过SVD进行低秩逼近4.4 保持秩的对抗优化4.5 渐进式剪枝框架 5 效果5.1 和SOTA方法对比5.2 消融实验5.3 开销分析 6 结…...

目前常用的后端技术
在后端开发中,有多种技术和框架可供选择,具体取决于项目的需求、团队的技能和经验,以及组织的架构决策。以下是一些常见的后端开发技术和框架: 1. 编程语言 Java: 广泛使用于企业级应用,有大量的库和框架…...
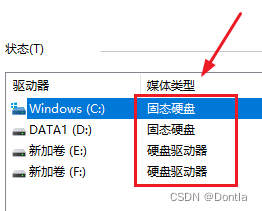
windows如何查看硬盘类型(查看磁盘类型)(查看是固态硬盘ssd还是机械硬盘hdd)(Windows优化驱动器——媒体类型)
文章目录 方法:使用Windows优化驱动器1、在任务栏搜索框中输入“优化驱动器”并打开它。2、在优化驱动器的窗口中,查看每个驱动器旁边的“媒体类型”。3、如果列出的是“固态驱动器”,那么它是SSD;如果是“硬盘驱动器”࿰…...

Java学习 (一) 环境安装
一、安装java环境 1、获取软件包 https://www.oracle.com/java/technologies/downloads/ .exe 文件一路装过去就行,最好别装c盘 ,我这里演示的时候是云主机只有C盘 2、配置环境变量 我的电脑--右键属性--高级系统设置--环境变量 在环境变量中添加如下配…...

**args和**kwargs是什么?
**args和 **kwargs是什么? **kwargs 是一个惯用的命名,指代一个字典(dictionary),其中包含了所有未在函数定义中明确指定的关键字参数。在 Python 中,函数的参数可以分为两类:位置参数…...
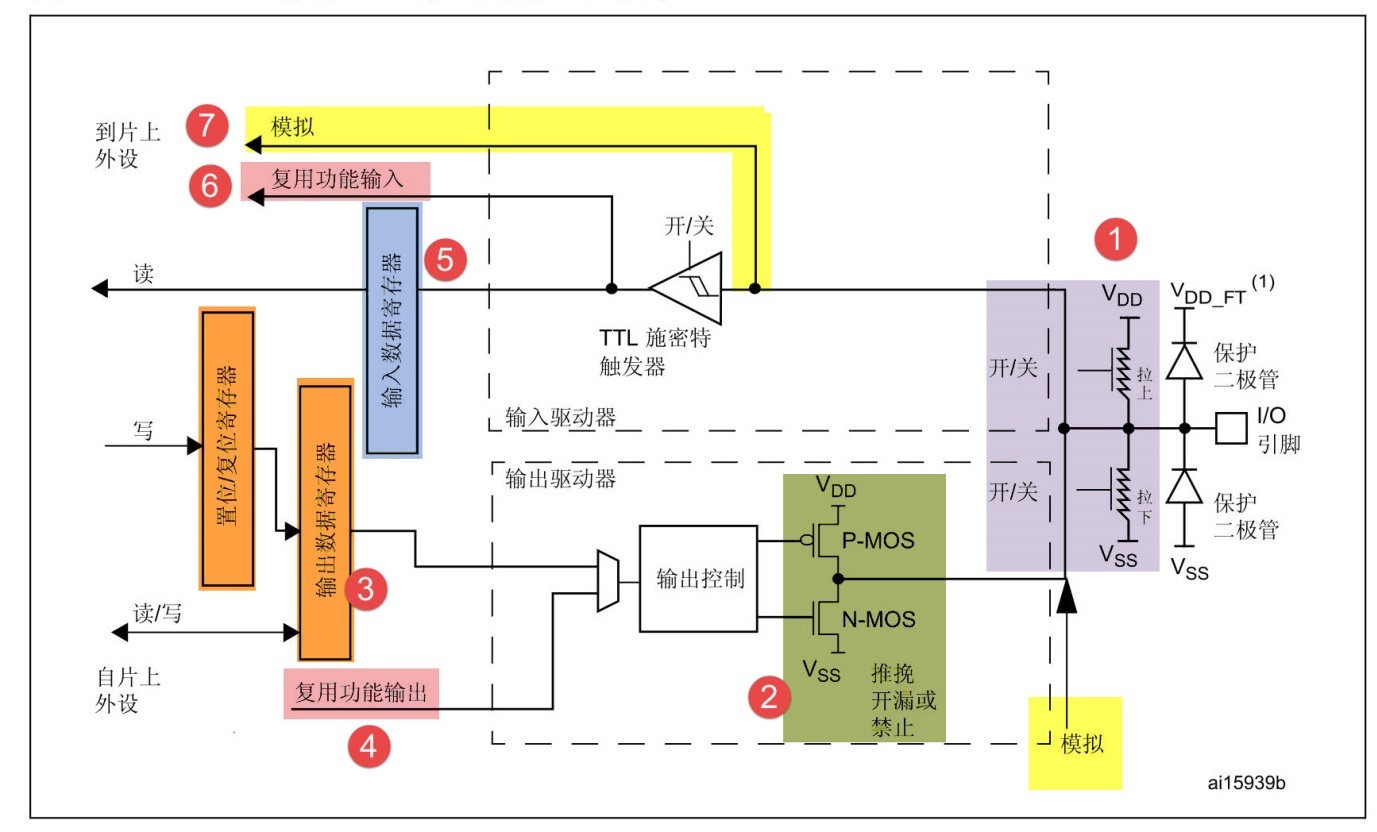
【STM32】GPIO简介
1.GPIO简介 GPIO是通用输入输出端口的简称,简单来说就是STM32可控制的引脚,STM32芯片的GPIO引脚与外部设备连接起来,从而实现与外部通讯、控制以及数据采集的功能。 STM32芯片的GPIO被分成很多组,每组有16个引脚。 最基本的输出…...

移植案例与原理 - utils子系统之KV存储部件 (1)
Utils子系统是OpenHarmony的公共基础库,存放OpenHarmony通用的基础组件。这些基础组件可被OpenHarmony各业务子系统及上层应用所使用。公共基础库在不同平台上提供的能力: LiteOS-M内核:KV(key value)存储、文件操作、定时器、Dump系统属性。…...

数据结构---排序算法
个人介绍 hello hello~ ,这里是 code袁~💖💖 ,欢迎大家点赞🥳🥳关注💥💥收藏🌹🌹🌹 🦁作者简介:一名喜欢分享和记录学习的…...
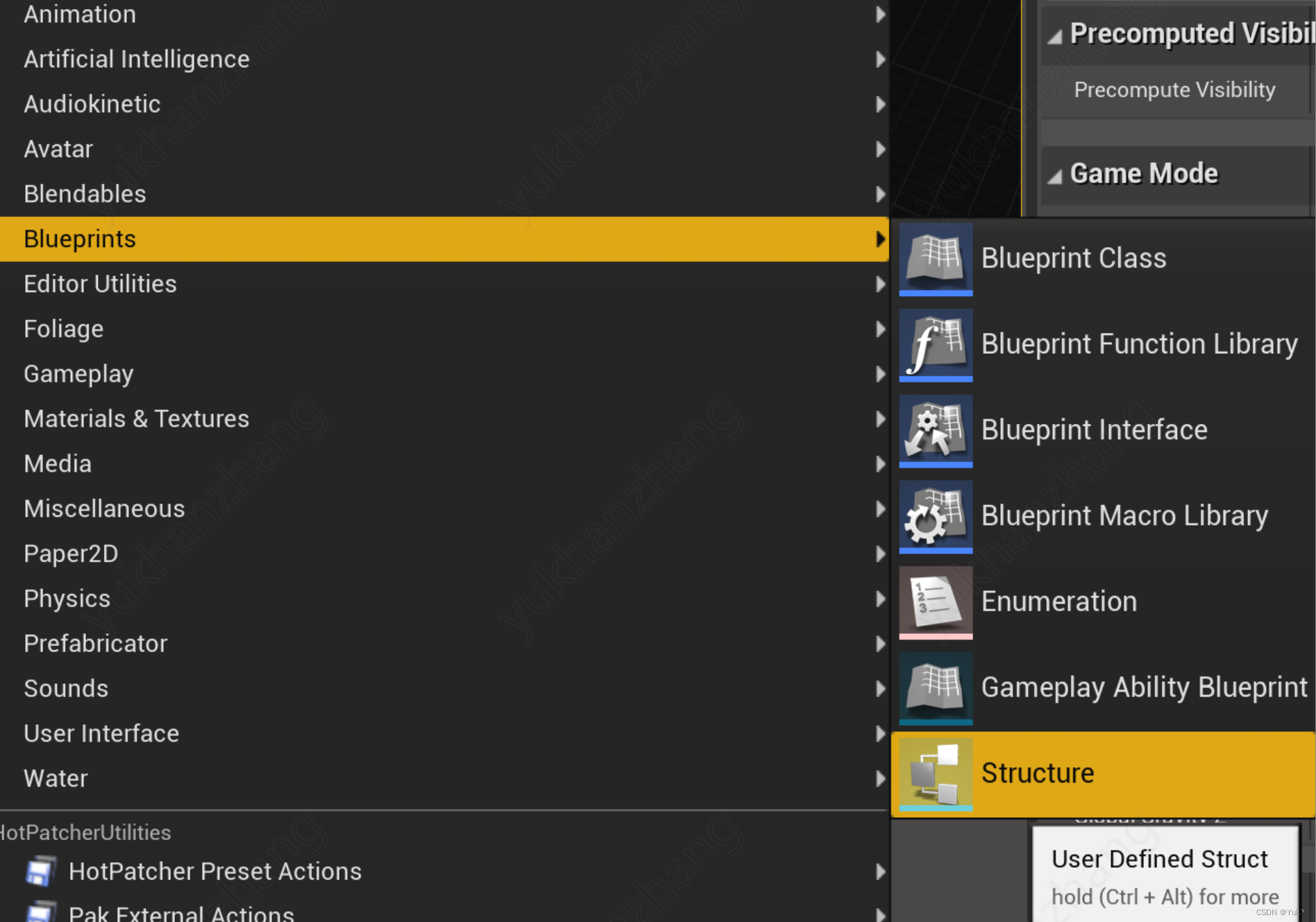
UE4 RPC进行网络同步
说明 基于UE本身提供的RPC同步机制 RPC远程过程调用允许客户端或服务器通过网络连接相互发送消息: 使用时需要注意: 1、必须从 Actor 上调用 2、Actor 必须被复制,注意勾选BP中Replicates,或使变量bReplicates true 3、注意如…...
——表单)
HTML(6)——表单
目录 input标签基本使用 input标签占位 单选框radio 上传文件file 下拉菜单 文本域 label标签 按钮 input标签基本使用 input标签type属性值不同,则功能不同 <input type"..."> type属性值说明text文本框,用于输入单行文本p…...

Go基础编程 - 08 - 结构体
结构体 1. 自定义类型、类型别名1.1. 自定义类型1.2. 类型别名1.3. 类型定义和类型别名的区别 2. 结构体定义3. 结构体初始化4. 指针类型结构体5. 构造函数6. 方法和接收者6.1. 方法定义6.2. 方法调用6.3. 值方法和指针方法6.4. 指针方法使用场景6.5. 任意类型添加方法 7. 结构…...
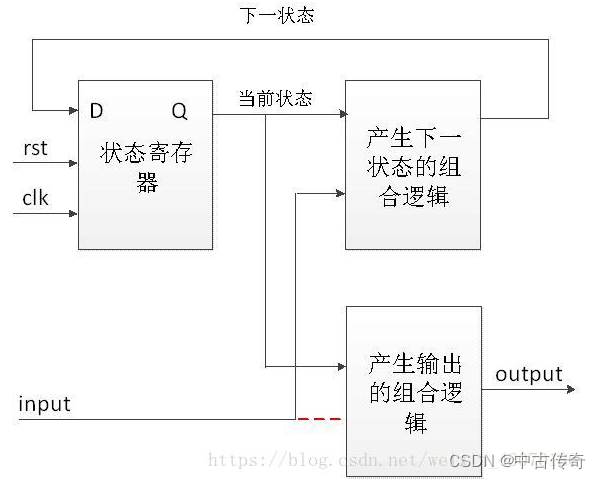
基于Verilog表达的FSM状态机
基于Verilog表达的FSM状态机 1 FSM1.1 Intro1.2 Why FSM?1.3 How to do 在这里聚焦基于Verilog的三段式状态机编程; 1 FSM 1.1 Intro 状态机是一种代码实现功能的范式;一切皆可状态机; 状态机编程四要素:– 1.状态State&#…...
招投标用,虽然有内定潜规则,但是方案都是要的,不一定就是价格低就能中标,毕竟是上百万以上的单子)
给一家银行做的数据中台系统架构方案书(DAMM)招投标用,虽然有内定潜规则,但是方案都是要的,不一定就是价格低就能中标,毕竟是上百万以上的单子
目录 概述需求分析系统架构DAMM设计思路数据治理数据安全实施计划维护和运营 1. 概述 1.1 项目背景 在数字化转型的浪潮中,银行业面临着越来越多的数据挑战与机遇。为了更好地利用数据资产,提升服务质量和运营效率,建立一个高效、灵活的数…...

【设计模式深度剖析】【6】【行为型】【中介者模式】
👈️上一篇:迭代器模式 | 下一篇:观察者模式👉️ 设计模式-专栏👈️ 文章目录 中介者模式定义英文原文直译如何理解? 中介者模式的角色1. 中介者(Mediator)2. 具体中介者(ConcreteMediato…...

金额转换但是接收对象类型未知时,金额转换公共方法囊括当对象为String\Integer\Number三种类型的转换方法
/** * deccription 金额转换方法 * param Object * value * return * return BigDecimal */ public BigDecimal getBigDecimal(Object value) { BigDecimal reValue new BigDecimal(0); if (value ! null) { …...
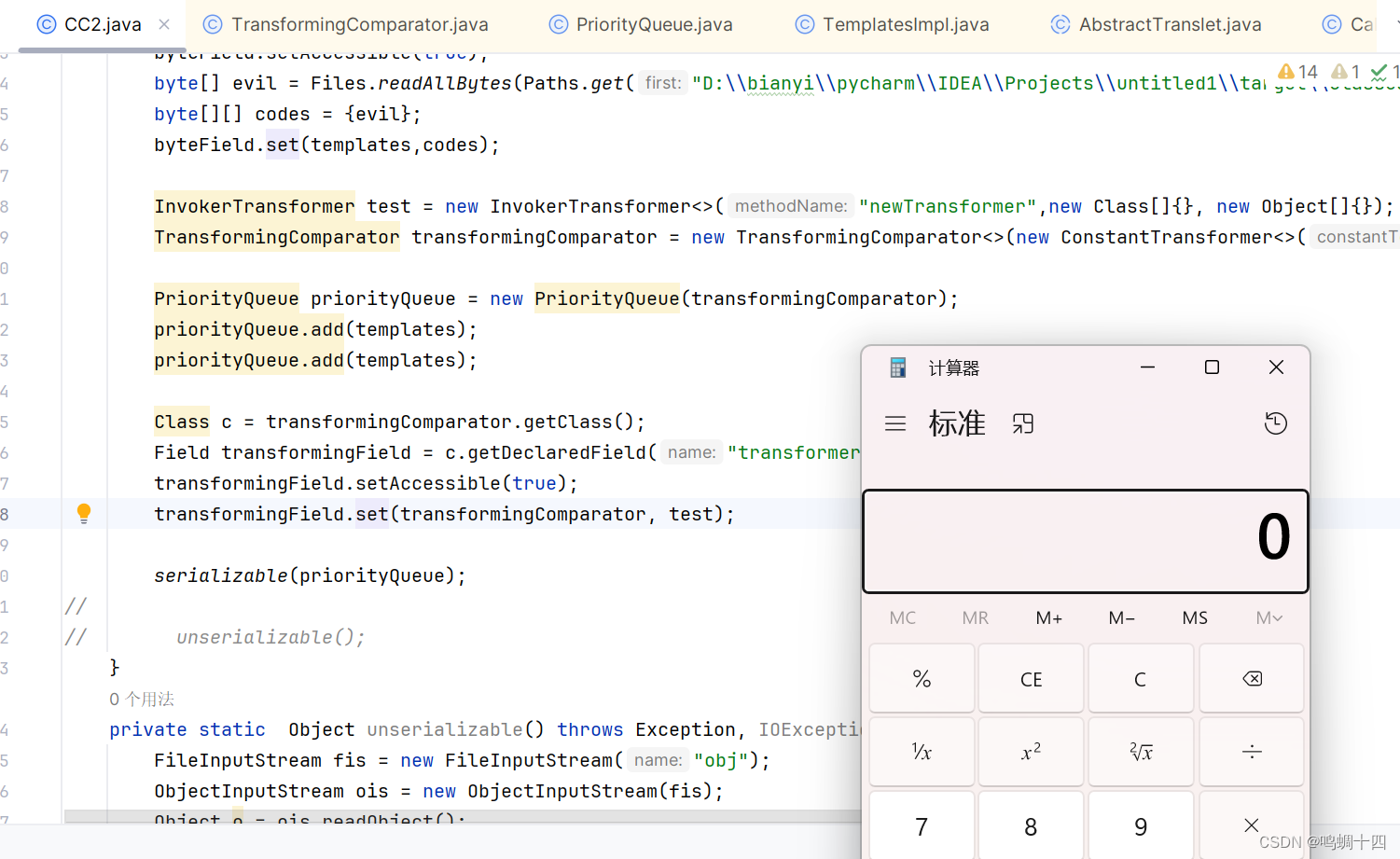
Commons-Collections篇-CC2链分析
前言 3.1-3.2.1版本中TransformingComparator并没有去实现Serializable接口,是不可以被序列化的,所以我们重新搭建一个4.0的具有漏洞的CC环境 CC2链主要使用的和CC4一样,但是区别在于CC2避免了使用Transformer数组,没有使用Insta…...
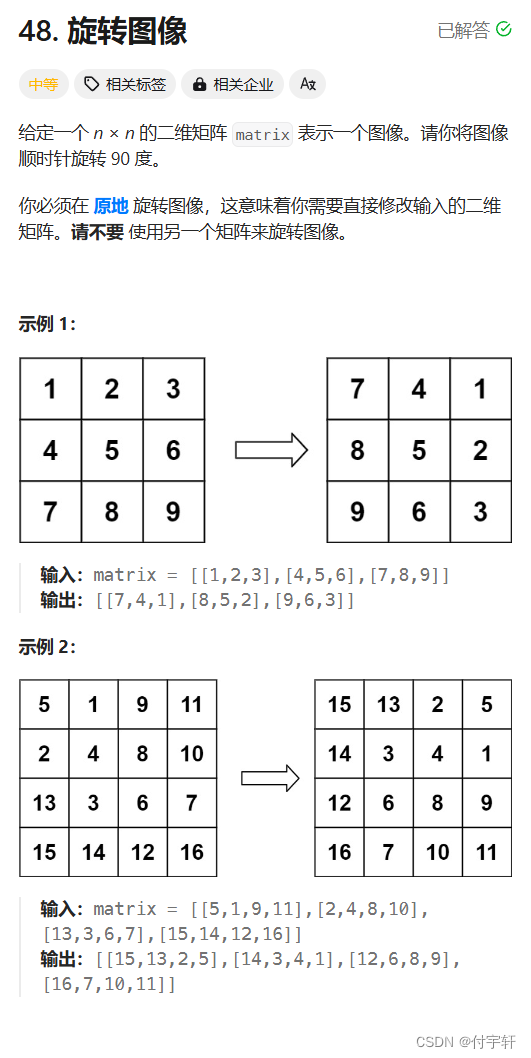
LeetCode 48.旋转图像
1.做题要求: 2.从此题我们可以看出规律为第几行要变为倒数第几列,所以我们最好先把二维数组存入一维数组中,然后先从最后一列遍历,把一维数组里的元素,依次等于遍历的元素即可: void rotate(int** matrix, int matrixSize, int*…...
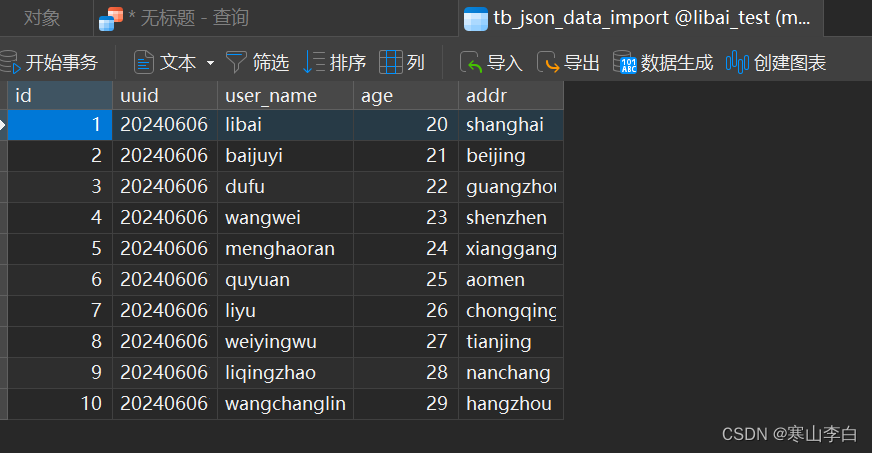
Navicat导入json文件(json文件数据导入到MySQL表中)
天行健,君子以自强不息;地势坤,君子以厚德载物。 每个人都有惰性,但不断学习是好好生活的根本,共勉! 文章均为学习整理笔记,分享记录为主,如有错误请指正,共同学习进步。…...
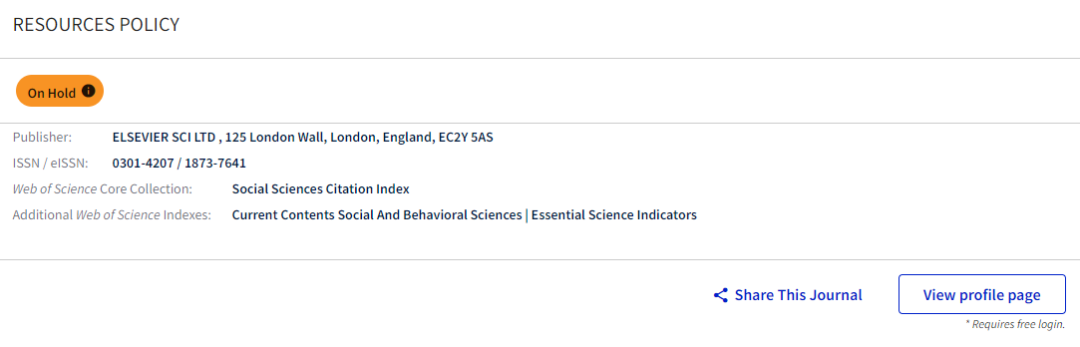
避雷!又6本期刊被On Hold!ELSEVIER旗下影响因子高达10+SSCI上榜
【SciencePub学术】继《INFORMATION SCIENCES》被On Hold 之后,又新增3本SCIE期刊、3本SSCI期刊被列入On Hold名单。其中包含ELSEVIER旗下影响因子高达10的《RESOURCES POLICY》。 官方现在对期刊质量的管控越来越严格了,被标记为On Hold后的期刊中&…...

proxy-doctor:自动化诊断与修复开发工具代理配置的利器
1. 项目概述与核心价值最近在折腾一些需要稳定网络连接的项目时,遇到了一个老生常谈但又极其恼人的问题:代理配置。无论是开发环境里的包管理工具,还是日常使用的命令行工具,一旦涉及到网络请求,代理设置不对ÿ…...

从零构建AOD-Net:PyTorch实战图像去雾模型开发全流程
1. 环境准备与数据理解 在开始构建AOD-Net之前,我们需要先搭建好开发环境。推荐使用Anaconda创建独立的Python环境,避免与其他项目产生依赖冲突。这里我选择Python 3.8和PyTorch 1.12的组合,这个版本经过实测在图像处理任务中表现稳定。 安装…...

打造便携式Kali Linux安全评估工具:OpenClaw USB定制全攻略
1. 项目概述:一个便携式安全评估工具的诞生 在安全研究、渗透测试或者应急响应的现场,你经常会遇到一个经典困境:目标环境可能是一台物理隔离的机器,或者是一台你无法安装任何软件的“干净”主机。你需要一个功能强大、即插即用的…...

迪拜塔幕墙设计
迪拜塔幕墙设计 【作 者】:罗永增 【关键词】:迪拜塔,幕墙,设计,系统。 前言:...

高效浏览器视频嗅探工具:猫抓扩展完整使用指南
高效浏览器视频嗅探工具:猫抓扩展完整使用指南 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 猫抓(Cat-Catch)…...
)
别再点‘忽略’了!开机弹出Visual C++ Runtime Library错误的终极排查指南(附Adobe软件关联排查)
Visual C Runtime Library错误:从崩溃到根治的全链路解决方案 每次开机时那个刺眼的Visual C Runtime Library错误弹窗,就像一位不请自来的访客,固执地打断你的工作节奏。对于依赖Adobe Creative Cloud或达芬奇等创意工具的专业人士来说&…...

VectorDBBench:向量数据库性能基准测试工具详解与实战
1. 项目概述:向量数据库性能测试的“瑞士军刀”如果你正在评估或使用向量数据库,那么你一定遇到过这个灵魂拷问:“这么多产品,到底哪个最适合我的场景?”是选名声在外的老牌劲旅,还是选后起之秀的专精选手&…...

Kubernetes自动化更新利器Keel:实现容器镜像的持续部署
1. 项目概述:为什么我们需要一个“自动化的应用更新管家”? 如果你和我一样,负责维护着几个、十几个,甚至几十个运行在Kubernetes或Docker环境中的应用,那你一定对“更新”这件事又爱又恨。爱的是,新版本意…...

Python自动化Excel数据抓取:OpenClaw技能实战指南
1. 项目概述:从Excel表格到智能数据抓取如果你每天的工作都离不开Excel,并且经常需要从各种网页、文档甚至PDF里手动复制粘贴数据,然后费劲地整理到表格里,那你一定对“Excel大师”这个称号既向往又头疼。我们总希望Excel能更“聪…...

构建个人知识库:从碎片化代码到结构化知识体系
1. 项目概述:从“ClawCode”看个人知识库的构建与价值最近在和一些开发者朋友交流时,发现一个普遍现象:大家电脑里都散落着无数代码片段、配置脚本、临时笔记和项目心得。这些“数字碎片”价值巨大,但往往因为缺乏有效的组织&…...