【GD32F303红枫派使用手册】第十九节
19.1 实验内容
通过本实验主要学习以下内容:
- SPI简介
- GD32F303 SPI简介
- SPI NOR FLASH——GD25Q32ESIGR简介
- 使用GD32F303 SPI接口实现对GD25Q32ESIGR的读写操作
19.2 实验原理
19.2.1 SPI简介
SPI(Serial Peripheral interface),顾名思义是串行外设接口,和UART不同的是,SPI是同步通讯接口,所以带有时钟线,而UART是异步通讯接口,不需要时钟线。
SPI通常使用4根线,分别为SCK、MOSI、MISO、NSS(CS):
- SCK:串列时脉,由主机发出
- MOSI:主机输出从机输入信号(数据由主机发出)
- MISO:主机输入从机输出信号(数据由从机发出)
- NSS:片选信号,由主机发出,一般是低电位有效
SPI默认为全双工工作,在这种工作模式下,主机通过MOSI线发送数据的同时,也在MISO线上接受数据,简单来说就是主机和从机之间进行数据交换。
SPI是一个可以实现一主多从的通讯接口,从机的片选由主机NSS脚来控制:

每个通讯时刻,只有一个从机NSS被主机选中,选中方式为主机拉低响应的NSS(CS)脚。
SPI的数据线只有一条(虽然有MOSI和MISO,但实际上每个CLK主机都只能发送和接受一个bit),所以称之为单线SPI。从SPI衍生出来的还有4线制SPI(QSPI)和8线制SPI(OSPI)以及其他多线制SPI,这个我们后面具体再聊。
19.2.2 GD32F303 SPI简介
GD32F303的主要特性如下:
◼ 具有全双工和单工模式的主从操作;
◼ 16位宽度,独立的发送和接收缓冲区;
◼ 8位或16位数据帧格式;
◼ 低位在前或高位在前的数据位顺序;
◼ 软件和硬件NSS管理;
◼ 硬件CRC计算、发送和校验;
◼ 发送和接收支持DMA模式;
◼ 支持SPI TI模式;
◼ 支持SPI NSS脉冲模式
◼ 支持SPI四线功能的主机模式(仅在SPI0中)
以下为GD32F303 SPI的框图:
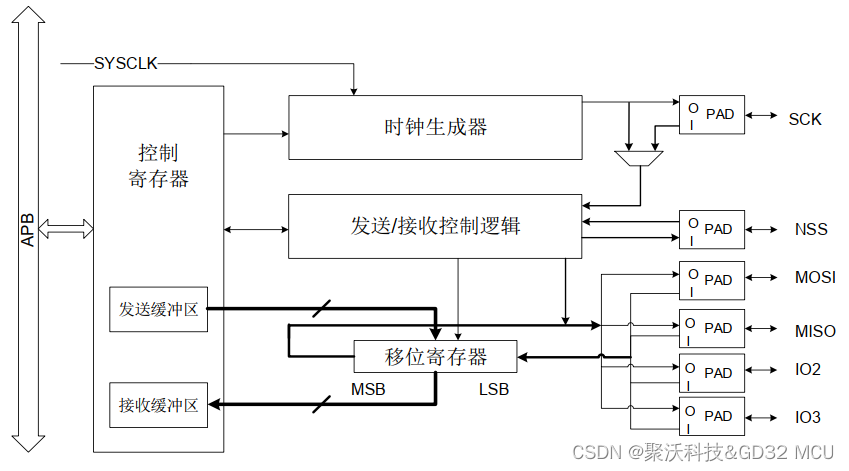
我们可以看到GD32F303有一个发送缓冲区和一个接受缓冲区这两个缓冲区都对应的是SPI_DATA寄存器,向SPI_DATA寄存器写数据将会把数据存入发送缓冲区,从SPI_DATA读数据,将从接受缓冲区获得数据。GD32F303还有一个移位寄存器,当主机发送缓冲区被写入数据时,数据将立刻转移到移位寄存器,移位寄存器通过 MOSI 信号线将字节传送给从机,从机也将自己的移位寄存器中的内容通过 MISO 信号线返回给主机。这样,两个移位寄存器中的内容就被交换。外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。
SPI数据bit在CLK的有效边沿被锁存,而有效边沿是可以选择的,分别为:
- 第一个上升沿
- 第一个下降沿
- 第二个下降沿
- 第二个上升沿
通过SPI_CTL0寄存器中的CKPL位和CKPH位来设置有效锁存沿。其中CKPL 位决定了空闲状态时 SCK 的电平, CKPH 位决定了第一个或第二个时钟跳变沿为有效采样边沿。SPI_CTL0 中的 LF 位可以配置数据顺序, 当 LF=1 时, SPI 先发送 LSB 位,当LF=0时,则先发送 MSB 位。SPI_CTL0 中的 FF16 位配置数据长度, 当 FF16=1 时,数据长度为 16位,否则为 8 位。下图为SPI的时序图:

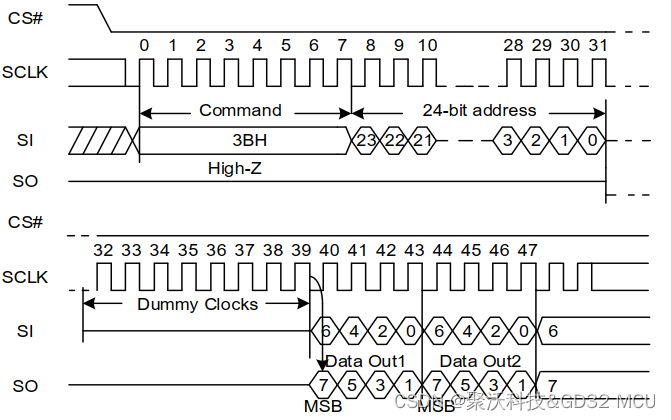
4线SPI(QSPI)的时序图如下(CKPL=1, CKPH=1, LF=0) ,我们可以看到QSPI是通过MOSI、MISO、IO2、IO3来进行数据收或发,所以QSPI是工作在半双工模式:

这里再介绍下SPI的NSS(片选)功能。NSS电平由主机来控制,主机将需要操作的从机NSS拉低,从而使该从机在总线上生效。
主机控制NSS的方式有两种——硬件方式和软件方式。主机硬件NSS模式下,NSS脚只能选择特定IO口(具体见datasheet中IO口功能表),当开始进行数据读写时,NSS自动拉低,这种方式的优点是主机NSS由硬件自动控制,缺点是只能控制一个从机;主机NSS软件模式下,NSS可以使用任意IO口,需要控制哪个从机,软件将对于IO拉低即可,这种方式的优点是可以实现一个主机多个从机的通讯,缺点是软件需要介入控制NSS脚。
| 注意:GD32F303 主机硬件NSS模式下,一旦开始第一次数据读取,NSS被硬件自动拉低后,将不会自行拉高,从机将处于始终被片选的状态下。 |
从机获取NSS状态的方式也有两种——硬件方式和软件方式。从机硬件NSS模式下,SPI 从NSS引脚获取 NSS 电平, 在软件NSS 模式(SWNSSEN = 1) 下, SPI 根据SWNSS 位得到NSS电平。
SPI除了单线全双工模式外,还有很多其他方式,比如可以实现只用MOSI进行数据收和发的半双工通讯,这样就可以省下MISO用作他处了,具体可以参考GD32F30x系列官方用户手册。
下面介绍下SPI的发送和接受流程:
发送流程
在完成初始化过程之后, SPI 模块使能并保持在空闲状态。在主机模式下, 当软件写一个数据到发送缓冲区时,发送过程开始。在从机模式下,当 SCK 引脚上的 SCK 信号开始翻转, 且NSS 引脚电平为低, 发送过程开始。 所以, 在从机模式下,应用程序必须确保在数据发送开始前, 数据已经写入发送缓冲区中。
当 SPI 开始发送一个数据帧时, 首先将这个数据帧从数据缓冲区加载到移位寄存器中,然后开始发送加载的数据。在数据帧的第一位发送之后, TBE(发送缓冲区空) 位置 1。 TBE 标志位置 1, 说明发送缓冲区为空, 此时如果需要发送更多数据, 软件应该继续写 SPI_DATA 寄存器。在主机模式下, 若想要实现连续发送功能, 那么在当前数据帧发送完成前, 软件应该将下一个数据写入 SPI_DATA 寄存器中。
接收流程
在最后一个采样时钟边沿之后, 接收到的数据将从移位寄存器存入到接收缓冲区, 且 RBNE(接收缓冲区非空) 位置 1。软件通过读 SPI_DATA 寄存器获得接收的数据, 此操作会自动清除RBNE 标志位。
19.2.3 SPI FLASH——GD25Q32ESIGR简介
GD25Q32ESIGR是一款容量为32Mbit(即4Mbyte)的SPI接口的NOR FLASH,其支持SPI和QSPI模式,芯片示意图如下:

GD25Q32ESIGR管脚定义如下:

GD25Q32ESIGR内部flash结构如下:

下面介绍GD25Q32ESIGR的一些功能码。
Write Enable (WREN) (06H) :接受到该命令后,GD25Q32ESIGR做好接受数据并进行存储的准备,时序如下:

Read Status Register (RDSR) (05H or 35H or 15H) :读GD25Q32ESIGR的状态,时序如下:

Read Data Bytes (READ) (03H) :接受到该命令后,GD25Q32ESIGR将数据准备好供主机读走,时序如下:

Dual Output Fast Read (3BH) :使GD25Q32ESIGR切换到QSPI模式,时序如下:
Quad Output Fast Read (6BH) :QSPI读命令,时序如下:

Quad Page Program (32H) :QSPI写命令,时序如下:

Sector Erase (SE) (20H) :Sector擦除命令,时序如下:

GD25Q32ESIGR就介绍到这里,读者可以在兆易创新官网下载该NOR FLASH的datasheet以获取更多信息。
19.3 硬件设计
红枫派开发板SPI——NOR FLASH的硬件设计如下:

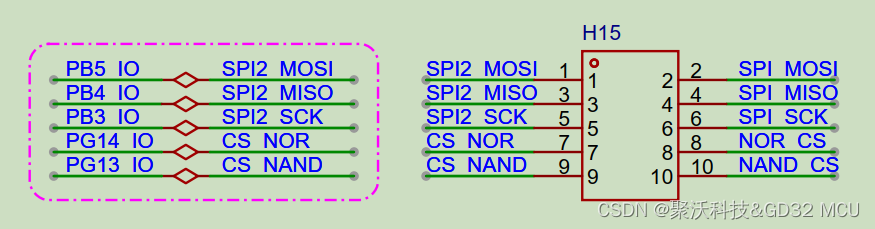
从图中可以看出,本实验使用的是普通单线SPI,GD25Q32ESIGR的片选由GD32F303ZET6的PG14控制(因PG14不是SPI的NSS管脚,所以本实验用主机NSS软件模式),GD25Q32ESIGR的SO、SI和SCLK分别和GD32F303ZET6的PB4(SPI2_MISO)、PB5(SPI2_MOSI)以及PB3(SPI2_CLK)相连。
19.4 代码解析
19.4.1 SPI初始化函数
在driver_spi.c文件中定义了SPI初始化函数driver_spi_init:
C
void driver_spi_init(typdef_spi_struct *spix)
{spi_parameter_struct spi_init_struct; rcu_periph_clock_enable(spix->rcu_spi_x);/* spi configure */spi_i2s_deinit(spix->spi_x);driver_gpio_general_init(spix->spi_cs_gpio); driver_gpio_general_init(spix->spi_sck_gpio);driver_gpio_general_init(spix->spi_mosi_gpio);driver_gpio_general_init(spix->spi_miso_gpio); if(spix->spi_mode==MODE_DMA){if(spix->spi_rx_dma!=NULL){if(spix->frame_size==SPI_FRAMESIZE_8BIT){driver_dma_com_init(spix->spi_rx_dma,(uint32_t)&SPI_DATA(spix->spi_x),NULL,DMA_Width_8BIT,DMA_PERIPHERAL_TO_MEMORY);}else{driver_dma_com_init(spix->spi_rx_dma,(uint32_t)&SPI_DATA(spix->spi_x),NULL,DMA_Width_16BIT,DMA_PERIPHERAL_TO_MEMORY);} if(spix->spi_tx_dma!=NULL){if(spix->frame_size==SPI_FRAMESIZE_8BIT){driver_dma_com_init(spix->spi_tx_dma,(uint32_t)&SPI_DATA(spix->spi_x),NULL,DMA_Width_8BIT,DMA_MEMORY_TO_PERIPHERAL);}else{driver_dma_com_init(spix->spi_tx_dma,(uint32_t)&SPI_DATA(spix->spi_x),NULL,DMA_Width_16BIT,DMA_MEMORY_TO_PERIPHERAL);} } }}if(spix->spi_cs_gpio!=NULL){driver_gpio_pin_set(spix->spi_cs_gpio);}spi_struct_para_init(&spi_init_struct);spi_init_struct.trans_mode = SPI_TRANSMODE_FULLDUPLEX;spi_init_struct.device_mode = spix->device_mode;spi_init_struct.frame_size = spix->frame_size;spi_init_struct.clock_polarity_phase = spix->clock_polarity_phase;if(spix->device_mode==SPI_MASTER){spi_init_struct.nss = SPI_NSS_SOFT;}else{spi_init_struct.nss = SPI_NSS_HARD; }spi_init_struct.prescale = spix->prescale;spi_init_struct.endian = spix->endian;spi_init(spix->spi_x, &spi_init_struct);spi_enable(spix->spi_x);
}19.4.2 SPI轮训接受一个数函数
在driver_spi.c文件中定义了使用轮训方式发送接受一个字节数据函数driver_spi_master_transmit_receive_byte:
C
uint8_t driver_spi_master_transmit_receive_byte(typdef_spi_struct *spix,uint8_t byte)
{SPI_DATA(spix->spi_x);SPI_STAT(spix->spi_x); driver_spi_flag_wait_timeout(spix,SPI_FLAG_TBE,SET);spi_i2s_data_transmit(spix->spi_x,byte);DRV_ERROR==driver_spi_flag_wait_timeout(spix,SPI_FLAG_RBNE,SET);return spi_i2s_data_receive(spix->spi_x);
}上面函数中有带超时功能的等待SPI状态的函数driver_spi_flag_wait_timeout,该函数定义在driver_spi.c:
C
Drv_Err driver_spi_flag_wait_timeout(typdef_spi_struct *spix, uint32_t flag ,FlagStatus wait_state)
{uint32_t timeout = driver_tick; while(wait_state!=spi_i2s_flag_get(spix->spi_x, flag)){if((timeout+SPI_TIMEOUT_MS) <= driver_tick) { return DRV_ERROR;} }return DRV_SUCCESS;
}19.4.3 SPI NOR FLASH 接口bsp层函数
操作NOR FLASH的函数都定义在bsp层文件bsp_spi_nor.c中,这个文件中定义的函数都是针对NOR FLASH特性来实现的,我们选取几个函数进行介绍。
1、NOR FLASH按sector擦除函数bsp_spi_nor_sector_erase,该函数流程是:使能NOR FLASH的写功能->拉低片选->向NOR FLASH发送sector擦除指令SE(0x20)->从低地址到高地址发送需要擦除的地址->拉高片选->等待NOR FALSH内部操作完成(循环去读NOR FLASH状态,直到读出编程状态为0)
C
void bsp_spi_nor_sector_erase(uint32_t sector_addr)
{/* send write enable instruction */bsp_spi_nor_write_enable();/* sector erase *//* select the flash: chip select low */bsp_spi_nor_cs_low();/* send sector erase instruction */driver_spi_master_transmit_receive_byte(&BOARD_SPI,SE);/* send sector_addr high nibble address byte */driver_spi_master_transmit_receive_byte(&BOARD_SPI,(sector_addr & 0xFF0000) >> 16);/* send sector_addr medium nibble address byte */driver_spi_master_transmit_receive_byte(&BOARD_SPI,(sector_addr & 0xFF00) >> 8);/* send sector_addr low nibble address byte */driver_spi_master_transmit_receive_byte(&BOARD_SPI,sector_addr & 0xFF);/* deselect the flash: chip select high */bsp_spi_nor_cs_high();/* wait the end of flash writing */bsp_spi_nor_wait_for_write_end();
}2、按page写数据函数bsp_spi_nor_page_write,该函数实现在page范围内写数据,该函数流程是:使能NOR FLASH的写功能->拉低片选->向NOR FLASH发送写指令WRITE(0x02)->从低地址到高地址发送要写的地址(每次进行写数据时,只需要给初始地址即可,写完一个数据后NOR FLASH内部会自动把地址+1)->写数据->拉高片选->等待NOR FALSH内部操作完成(循环去读NOR FLASH状态,直到读出编程状态为0)
C
void bsp_spi_nor_page_write(uint8_t* pbuffer, uint32_t write_addr, uint16_t num_byte_to_write)
{/* enable the write access to the flash */bsp_spi_nor_write_enable();/* select the flash: chip select low */bsp_spi_nor_cs_low();/* send "write to memory" instruction */driver_spi_master_transmit_receive_byte(&BOARD_SPI,WRITE);/* send write_addr high nibble address byte to write to */driver_spi_master_transmit_receive_byte(&BOARD_SPI,(write_addr & 0xFF0000) >> 16);/* send write_addr medium nibble address byte to write to */driver_spi_master_transmit_receive_byte(&BOARD_SPI,(write_addr & 0xFF00) >> 8);/* send write_addr low nibble address byte to write to */driver_spi_master_transmit_receive_byte(&BOARD_SPI,write_addr & 0xFF);/* while there is data to be written on the flash */while(num_byte_to_write--){/* send the current byte */driver_spi_master_transmit_receive_byte(&BOARD_SPI,*pbuffer);/* point on the next byte to be written */pbuffer++;}/* deselect the flash: chip select high */bsp_spi_nor_cs_high();/* wait the end of flash writing */bsp_spi_nor_wait_for_write_end();
}3、按buffer写数据函数bsp_spi_nor_buffer_write,该函数实现任意长度数据写入,使用page写函数搭配算法,可以跨page进行写数据:
C
void bsp_spi_nor_buffer_write(uint8_t* pbuffer, uint32_t write_addr, uint16_t num_byte_to_write)
{uint8_t num_of_page = 0, num_of_single = 0, addr = 0, count = 0, temp = 0;addr = write_addr % SPI_FLASH_PAGE_SIZE;count = SPI_FLASH_PAGE_SIZE - addr;num_of_page = num_byte_to_write / SPI_FLASH_PAGE_SIZE;num_of_single = num_byte_to_write % SPI_FLASH_PAGE_SIZE;/* write_addr is SPI_FLASH_PAGE_SIZE aligned */if(0 == addr){/* num_byte_to_write < SPI_FLASH_PAGE_SIZE */if(0 == num_of_page)bsp_spi_nor_page_write(pbuffer,write_addr,num_byte_to_write);/* num_byte_to_write > SPI_FLASH_PAGE_SIZE */else{while(num_of_page--){bsp_spi_nor_page_write(pbuffer,write_addr,SPI_FLASH_PAGE_SIZE);write_addr += SPI_FLASH_PAGE_SIZE;pbuffer += SPI_FLASH_PAGE_SIZE;}bsp_spi_nor_page_write(pbuffer,write_addr,num_of_single);}}else{/* write_addr is not SPI_FLASH_PAGE_SIZE aligned */if(0 == num_of_page){/* (num_byte_to_write + write_addr) > SPI_FLASH_PAGE_SIZE */if(num_of_single > count){temp = num_of_single - count;bsp_spi_nor_page_write(pbuffer,write_addr,count);write_addr += count;pbuffer += count;bsp_spi_nor_page_write(pbuffer,write_addr,temp);}elsebsp_spi_nor_page_write(pbuffer,write_addr,num_byte_to_write);}else{/* num_byte_to_write > SPI_FLASH_PAGE_SIZE */num_byte_to_write -= count;num_of_page = num_byte_to_write / SPI_FLASH_PAGE_SIZE;num_of_single = num_byte_to_write % SPI_FLASH_PAGE_SIZE;bsp_spi_nor_page_write(pbuffer,write_addr, count);write_addr += count;pbuffer += count;while(num_of_page--){bsp_spi_nor_page_write(pbuffer,write_addr,SPI_FLASH_PAGE_SIZE);write_addr += SPI_FLASH_PAGE_SIZE;pbuffer += SPI_FLASH_PAGE_SIZE;}if(0 != num_of_single)bsp_spi_nor_page_write(pbuffer,write_addr,num_of_single);}}
}4、按buffer读数据函数bsp_spi_nor_buffer_read,该函数实现任意地址读数据,该函数流程是:拉低片选->向NOR FLASH发送读指令READ(0x03)->从低地址到高地址发送要读的地址(每次进行读数据时,只需要给初始地址即可,读完一个数据后NOR FLASH内部会自动把地址+1)->读数据->拉高片选:
C
void bsp_spi_nor_buffer_read(uint8_t* pbuffer, uint32_t read_addr, uint16_t num_byte_to_read)
{/* select the flash: chip slect low */bsp_spi_nor_cs_low();/* send "read from memory " instruction */driver_spi_master_transmit_receive_byte(&BOARD_SPI,READ);/* send read_addr high nibble address byte to read from */driver_spi_master_transmit_receive_byte(&BOARD_SPI,(read_addr & 0xFF0000) >> 16);/* send read_addr medium nibble address byte to read from */driver_spi_master_transmit_receive_byte(&BOARD_SPI,(read_addr& 0xFF00) >> 8);/* send read_addr low nibble address byte to read from */driver_spi_master_transmit_receive_byte(&BOARD_SPI,read_addr & 0xFF);/* while there is data to be read */while(num_byte_to_read--){/* read a byte from the flash */*pbuffer = driver_spi_master_transmit_receive_byte(&BOARD_SPI,DUMMY_BYTE);/* point to the next location where the byte read will be saved */pbuffer++;}/* deselect the flash: chip select high */bsp_spi_nor_cs_high();
}19.4.4 main函数实现
以下为main函数代码:
C
int main(void)
{//延时、共用驱动部分初始化 driver_init(); //初始化LED组和默认状态bsp_led_group_init();bsp_led_on(&LED0);bsp_led_off(&LED1); //初始化UART打印bsp_uart_init(&BOARD_UART);//初始化SPI bsp_spi_init(&BOARD_SPI); //初始化SPI NOR bsp_spi_nor_init(); printf("\n\rSPI Flash:GD25Q32E configured...\n\r");//读取flash idflash_id = bsp_spi_nor_read_id();printf("\n\rThe Flash_ID:0x%X\n\r",flash_id);//比对flash id是否一致if(SFLASH_ID == flash_id){printf("\n\r\n\rWrite to tx_buffer:\n\r\n\r");//准备数据for(uint16_t i = 0; i < BUFFER_SIZE; i ++){tx_buffer[i] = i;printf("0x%02X ",tx_buffer[i]);if(15 == i%16)printf("\n\r");}printf("\n\r\n\rRead from rx_buffer:\n\r"); //擦除要写入的sectorbsp_spi_nor_sector_erase(FLASH_WRITE_ADDRESS);//写入数据 bsp_spi_nor_buffer_write(tx_buffer,FLASH_WRITE_ADDRESS,TX_BUFFER_SIZE);//延时等待写完成delay_ms(10);//回读写入数据bsp_spi_nor_buffer_read(rx_buffer,FLASH_READ_ADDRESS,RX_BUFFER_SIZE); /* printf rx_buffer value */for(uint16_t i = 0; i <= 255; i ++){printf("0x%02X ", rx_buffer[i]);if(15 == i%16)printf("\n\r");}//比较回读和写入数据if(ERROR == memory_compare(tx_buffer,rx_buffer,256)){printf("Err:Data Read and Write aren't Matching.\n\r");/* spi flash read id fail */printf("\n\rSPI Flash: Read ID Fail!\n\r");//写入错误/* turn off all leds */bsp_led_on(&LED0);/* turn off all leds */bsp_led_on(&LED1); while(1);}else{printf("\n\rSPI-GD25Q16 Test Passed!\n\r");}}else{ //ID读取错误/* spi flash read id fail */printf("\n\rSPI Flash: Read ID Fail!\n\r");/* turn off all leds */bsp_led_on(&LED0);/* turn off all leds */bsp_led_on(&LED1); while(1);}while(1){/* turn off all leds */bsp_led_toggle(&LED0);/* turn off all leds */bsp_led_toggle(&LED1); delay_ms(200);}
}main函数中实现了向特定NOR FLASH地址写数据,并回读出来,并将写入的数据和回读出来的数据进行对比,看是否写入成功。
19.5 实验结果
使用USB-TypeC线,连接电脑和板上USB to UART口后,配置好串口调试助手,即可看到MCU对SPI NOR flash的擦写读过程。

由聚沃科技原创,来源于【红枫派开发板】第十九讲 SPI-SPI NOR FLASH读写实验 - 苏州聚沃电子科技有限公司 (gd32bbs.com)
相关文章:
【GD32F303红枫派使用手册】第十九节
19.1 实验内容 通过本实验主要学习以下内容: SPI简介 GD32F303 SPI简介 SPI NOR FLASH——GD25Q32ESIGR简介 使用GD32F303 SPI接口实现对GD25Q32ESIGR的读写操作 19.2 实验原理 19.2.1 SPI简介 SPI(Serial Peripheral interface)&…...

【C语言】扫雷游戏
Hi~!这里是奋斗的小羊,很荣幸您能阅读我的文章,诚请评论指点,欢迎欢迎 ~~ 💥💥个人主页:奋斗的小羊 💥💥所属专栏:C语言 🚀本系列文章为个人学习…...
逻辑蕴含、函数依赖集的闭包、Armstrong公理、属性集闭包
一、引言 Armstrong公理-从给定的函数依赖集得到关系模式的完整依赖集 二、逻辑蕴含 1、定义 设F是关系模式R上的函数依赖集,X、Y是R的属性子集,对于R的每个满足F的关系实例r,若函数 依赖都成立,则称F逻辑蕴含。 记为&#…...
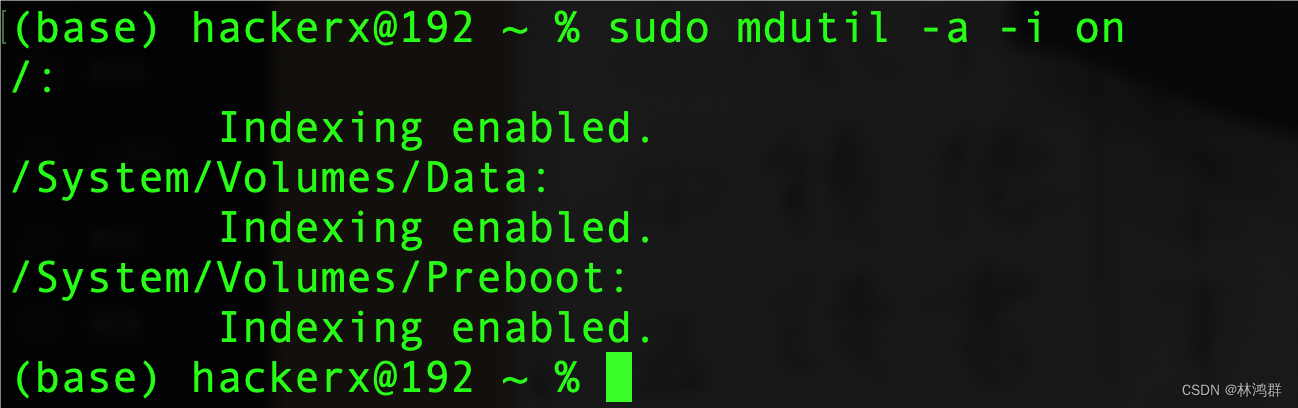
macOS聚集搜索功能开启与关闭
按下command空格弹出 使用搜索 关闭搜索 sudo mdutil -a -i off 启用搜索 sudo mdutil -a -i on...

大模型“诸神之战”,落地才是赛点
ChatGPT 诞生已经快一年,你还在与它对话吗? 有的人用来写报告、改代码,让它成为得力帮手;有的人却只是“调戏”个两三回,让它创作诗歌或故事,便不再“宠幸”。 根据网站分析工具 SimilarWeb 的数据&#…...

接口重放攻击
如何保证接口安全,做到防篡改防重放?_接口防止串改-CSDN博客 接口安全设计之防篡改和防重放_接口防篡改机制-CSDN博客 基于nonce timestamp 的方案 nonce的意思是仅一次有效的随机字符串,要求每次请求时该参数要保证不同。实际使用用户信息…...

MySQL学习笔记-进阶篇-SQL优化
SQL优化 插入数据 insert优化 1)批量插入 insert into tb_user values(1,Tom),(2,Cat),(3,Jerry); 2)手动提交事务 mysql 默认是自动提交事务,这样会导致频繁的开启和提交事务,影响性能 start transaction insert into tb_us…...

【机器学习】第2章 线性回归及最大熵模型
一、概念 1.回归就是用一条曲线对数据点进行拟合,该曲线称为最佳拟合曲线,这个拟合过程称为回归。 2.一个自变量 叫 一元线性回归,大于一个自变量 叫 多元线性回归。 (1)多元回归:两个x,一个…...

科技创新对农业发展的影响
科技创新对农业发展的影响深远且广泛,主要体现在以下几个方面: 一、提高农业生产效率 引入先进的农业机械设备:新型农业机械设备如无人机、机器人等的应用,显著减轻了农民的劳动强度,提高了农作物的种植效率。利用精…...

Linux 常用命令 - rm 【删除文件或目录】
简介 rm 命令源于英文单词 “remove”,它用于删除文件或目录。rm 是 Linux 系统中最基本的命令之一,用于删除指定的文件或目录。默认情况下,rm 不会删除目录,但可以通过递归删除选项来实现。 使用方式 rm [选项]... [文件]...常…...

一血c++
题目描述 每一个竞赛选手都无法拒绝拿一血 "一血"其实就是同学们在榜单上看到的深绿色的标记,代表着某道题目,他是第一个通过的。 叶苡朋老师是一名资深信奥选手,在大学多次获奖,也是一个资深抢一血爱好者࿰…...

无问芯穹Qllm-Eval:制作多模型、多参数、多维度的量化方案
前言 近年来,大语言模型(Large Models, LLMs)受到学术界和工业界的广泛关注,得益于其在各种语言生成任务上的出色表现,大语言模型推动了各种人工智能应用(例如ChatGPT、Copilot等)的发展。然而…...

2024-05-31T08:36:09.000+00:00 转换 YYYY-MM-DD HH-MM-SS
function formatDate(date) {// 处理ISO 8601字符串if (typeof date string) {date new Date(date);}// 处理时间戳else if (typeof date number) {date new Date(date * 1000); // 假设后端时间戳为秒,需要乘以1000转换为毫秒}// 自定义格式化,例如…...
reason: the Java file contained parse errors
今天用Maven打包项目时发生一个错误: file: D:\workspace\echoo2.0-xxx-xxx-portal\src\main\java\com\echoo\service\impl\DecDataServiceImpl.java; reason: the Java file contained parse errors 打包报错显示这个类解析错误 在IDEA中没有任何错误提示 问题所…...
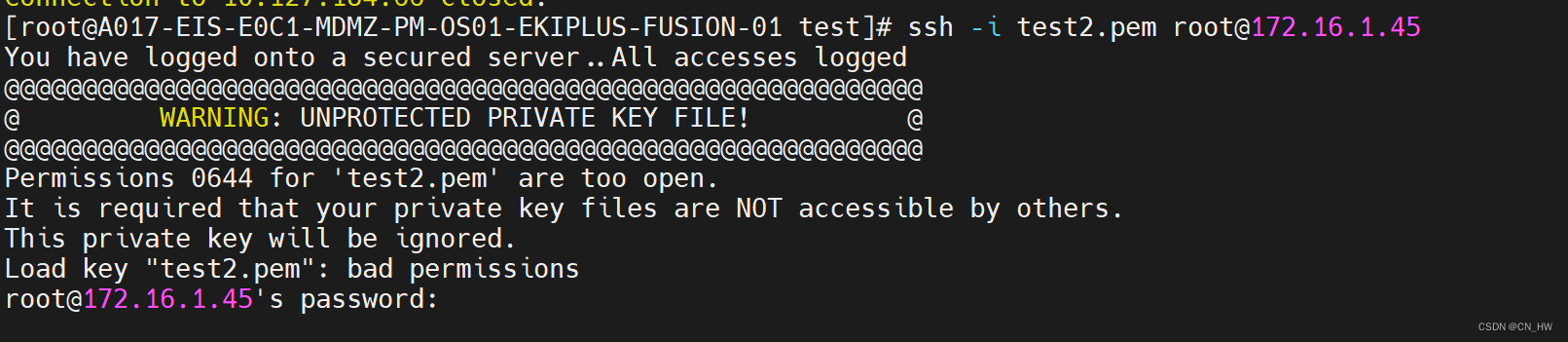
使用密钥对登录服务器
目录 1、使用密钥文件登录服务器 2、登录成功画面: 3、如若出现以下状况,则说明密钥文件登录失败 1、使用密钥文件登录服务器 首先需要上传pem文件 2、登录成功画面: 3、如若出现以下状况,则说明密钥文件登录失败 解决方法&…...

面试_多线程
线程池 线程池的参数有哪些 线程池七大参数分别是corePoolSize、maximumPoolSize、keepAliveTime、unit、workQueue、threadFactory、handler corePoolSize:线程池中常驻核心线程数maximumPoolSize:线程池能够容纳同时执行的最大线程数keepAliveTime&…...

跨境电商必备?揭秘原生IP的作用
一、什么是原生IP? 原生IP(Native IP)是指由互联网服务提供商(ISP)或服务器提供商直接分配给用户的IP地址,这种IP地址直接与用户设备或网络相连,也就是指这个IP的注册地址和服务器机房所在的国…...

mysql竖表变横表不含聚合
文章目录 前言一、vertical_table二、转换1.要将其转换为横表形式,例如:2.sql 总结 前言 在MySQL中将竖表转换为横表(也称为行转列操作),不涉及聚合函数,通常可以通过使用条件判断和自连接来实现。假设有一…...

application/x-www-form-urlencoded和json的区别
application/x-www-form-urlencoded 和 application/json 是两种不同的数据格式,常用于HTTP请求中传递数据。 它们各自的特点和使用场景如下: 1. application/x-www-form-urlencoded •特点:这是一种传统的表单提交时采用的编码类型&#x…...
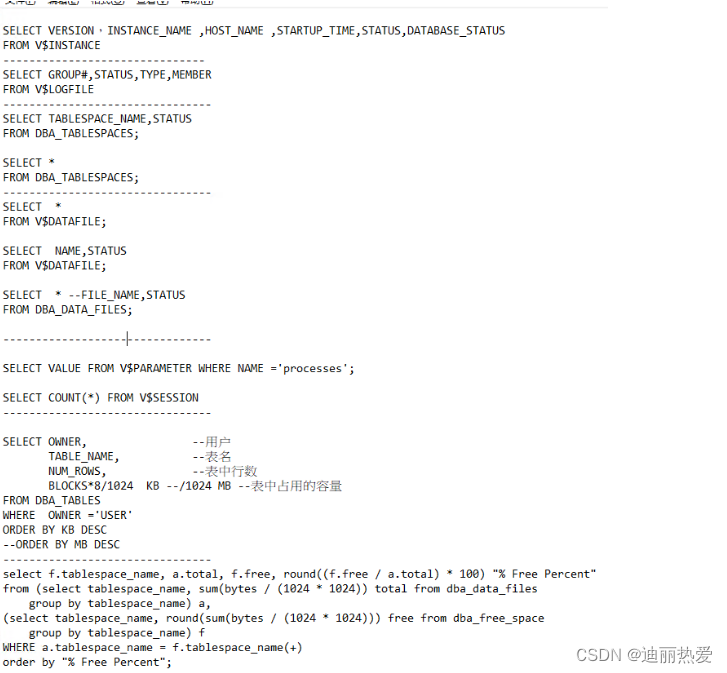
oracle数据库日常保养或巡检语句实践整理汇总
目录 1.目的 2.操作工具 3.实践说明 1.检查Oracle实例状态 2.检查Oracle在线日志状态 3.检查Oracle表空间状态 4.检查Oracle所有数据文件状态 5.检查Oracle数据库连接情况 6.检查Oracle表容量占用大小 7.检查Oracle备份 8.检查数据库表空间的使用情况 4.总结 1.目的 …...

出口黎巴嫩必知:清关要求与税费标准
黎巴嫩清关需备齐提单、发票、原产地证等文件,经申报、审查、缴税、查验后放行。关税优惠覆盖旅游、农业、工业投资,助力企业降低成本。黎巴嫩清关流程准备清关文件装货单(Bill of Lading):船运公司签发的货物装船证明…...

Midscene.js 2025技术演进:从自动化工具到智能操作平台的架构升级
Midscene.js 2025技术演进:从自动化工具到智能操作平台的架构升级 【免费下载链接】midscene AI-powered, vision-driven UI automation for every platform. 项目地址: https://gitcode.com/GitHub_Trending/mid/midscene 在人工智能技术快速发展的今天&…...

AI赋能数字钱包:构建安全智能的DeFi资产管理助手
1. 项目概述:当AI遇上数字钱包,一场关于信任与效率的变革最近在关注Web3和数字资产管理领域的朋友,可能都注意到了“windagency/valora.ai”这个项目。乍一看,它像是一个托管在GitHub上的开源代码库,但深入探究后你会发…...

WorkBuddy清理Claw历史会话指南
🔧 WorkBuddy 清理Claw历史会话指南「有些在Claw上用来做测试的对话一直存在,界面没有删除按钮,就算把文件夹删了,历史记录也还是在,强迫症都犯了!!!」—— 来自一位真实网友的吐槽如…...

从零实现MD5算法:C语言详解与工程实践指南
1. 从零开始:为什么我们需要自己实现MD5?在信息安全领域,MD5(Message-Digest Algorithm 5)是一个绕不开的名字。尽管它早已被证明存在碰撞漏洞,不再适用于高安全级别的数字签名或证书场景,但它在…...

从编码到网络:GLM模型在图论分析中的实战指南
1. GLM模型与图论分析的完美结合 第一次接触GLM模型是在分析脑网络数据时,当时手头有一批健康人和患者的脑功能连接数据,需要找出两组间的差异。传统方法只能逐个节点比较,效率低下且容易漏掉整体网络特征。直到发现GLM模型可以完美融入图论分…...
)
综合实战——开发一个“智能标书辅助生成系统“(01需求分析与架构设计)
综合实战——开发一个“智能标书辅助生成系统“ 前言:为什么选择"标书生成"作为实战项目? 在正式开始之前,先回答一个关键问题:为什么选这个场景? 标书(Bid/Proposal)生成是企业中一个真实且高价值的AI应用场景: 痛点明确:写一份标书需要3-5天,且大量内容…...
)
新手装 Node.js 总踩坑,这份保姆级教程帮你一次搞定(附镜像加速+版本切换)
🔥个人主页:北极的代码(欢迎来访) 🎬作者简介:java后端学习者 ❄️个人专栏:苍穹外卖日记,SSM框架深入,JavaWeb ✨命运的结局尽可永在,不屈的挑战却不可须臾或…...

云计算能效评估:从PUE到xPUE的进阶实践
1. 云计算能效评估的困境与突破 在数据中心运营成本中,电力消耗常年占据40%以上的比重。传统PUE(Power Usage Effectiveness)作为行业通用指标,其计算逻辑看似简单——用数据中心总能耗除以IT设备能耗,却隐藏着巨大的认…...

低代码还没玩明白,AI又来抢活了?
昨天还在研究怎么把那个表格组件的属性面板配得再顺手一点,今天打开朋友圈,满屏都是“AI自动生成页面”“一句话生成低代码配置”。我心里咯噔一下:不是吧,又来? 说实话,我并不是什么技术先锋。三年前第一次…...