(7)摄像机和云台
文章目录
前言
1 云台
2 带有MAVLink接口的摄像机
3 相机控制和地理标签
4 视频质量差的常见修复方法
5 详细主题
前言
Copter、Plane 和 Rover 最多支持 3 轴云台,包括自动瞄准感兴趣区域(ROI)的相机和自动触发相机快门等先进功能。按照下面的链接来解释如何配置云台和快门触发。

1 云台
ArduPilot 支持无刷直接驱动云台(Tarot, SimpleBGC, SToRM32),它有自己的自稳定控制器,也支持更简单的伺服驱动云台,由 ArduPilot 控制稳定功能。
- Brushless PWM — 接受 PWM 或 SBUS 输入进行角度控制的无刷云台;
- DJI RS2 and RS3-Pro gimbals
- Gremsy Mio, Pixy, S1, T3, T7 and ZIO — 高质量的三轴云台;
- Servo Gimbals— 老式的伺服驱动云台,ArduPilot 提供稳定功能;
- SimpleBGC (aka AlexMos) Gimbal Controller — 一个流行的 2 轴或 3 轴有刷云台控制器,使用一个定制的串行接口;
- Siyi ZR10, ZR30 and A8 — 三轴云台和摄像机;
- SToRM32 Gimbal Controller — 一个廉价的 2 轴或 3 轴无刷云台控制器,通过串行接口响应MAVLink 指令(比 PWM 更丰富的格式);
- ViewPro gimbals
支架控制在云台/支架控制(Gimbal / Mount Controls)页上有介绍。
2 带有MAVLink接口的摄像机
- FLIR Vue Pro Thermal Camera
3 相机控制和地理标签
ArduPilot 允许你配置相机快门输出端口(configure the camera shutter output port)(伺服、继电器)。
!Note
请务必将 CAMx_INTRVAL_MIN 设置为大于使用相机触发功能时相机的最快拍摄速度。
在相机任务计划中(camera mission planning),你可以指定相机快门应何时触发,或飞行器在拍摄之间应行驶的距离。
相机制造商使用他们自己的机制来远程控制相机(包括其快门)。这些主题解释了如何配置相机的快门,并列出了一些不同的方法,将输出信号转换为你的特定相机所期望的形式:
- Airpixel Entire Geotagger
- DROTAG x Geotagger
- Seagull IR Camera Trigger
- Seagull MAP2 Camera Trigger
- Seagull MAP-X2 Camera Trigger and Logger
- Seagull REC Camera Trigger
- StratosnapperV2 Camera Trigger
- Camera Triggering Directly from AUX Ports
- Camera Triggering Configuration
- Camera Triggering using CHDK
- Camera Triggering using CHDK Tutorial (非标准整合)
- RunCam Camera Control
4 视频质量差的常见修复方法
下面列出了一些比较常见的视频不良的原因和解决办法:
1. "果冻"效应(或横滚快门)是使用带有 CMOS 传感器的相机(GoPro 等)的副产品,由不平衡的桨叶/电机的振动引起,可以通过将相机安装在软橡胶、硅胶、泡沫耳塞或有时只安装在魔术贴上来缓解。
2. 许多相机中的数字和光学防抖系统常常因为许多多旋翼飞机上的振动而表现不佳。
- 例外情况:索尼摄像机的平衡稳拍系统即使在最大 30 功率变焦时也非常有效。
3. 为了获得更好和更平稳的偏航,在你的遥控装置上使用 Expo 控制,并降低自动驾驶仪中的ACRO_Y_RATE 增益。
重要的是要记住,即使有一个完美的设置,摄影是一门艺术,也是一门科学。使用相机直指地面是一个很好的开始,但除垂直角度外,还可以获得更多戏剧性的观角。安装时与垂直方向偏离约 40度,主要获得地面照片,但有一个斜视图。偏离垂直方向约 70 度,将使你获得更多的天空,从而获得更多的风景照片。ArduPilot 会将云台稳定在你设定的任何位置。
5 详细主题
- Brushless PWM
- Gremsy Pixy U Gimbal
- Servo Gimbal
- SimpleBGC Gimbal Controller
- Siyi ZR10, ZR30 and A8
- SToRM32 Gimbal Controller
- FLIR Vue Pro Thermal Camera
- Airpixel Entire Geotagger
- DROTAG x Geotagger
- Seagull IR Camera Trigger
- Seagull MAP2 Camera Trigger
- Seagull MAP-X2 Camera Trigger and Logger
- Seagull REC Camera Trigger
- StratosnapperV2 Camera Trigger
- Camera Trigger Directly from AUX Ports
- Camera Triggering Configuration
- Camera Triggering using CHDK
- Camera Triggering using CHDK Tutorial
- RunCam Camera Control
- Gimbal / Mount Controls
- ViewPro gimbals
- DJI RS2 and RS3-Pro gimbals
相关文章:
(7)摄像机和云台
文章目录 前言 1 云台 2 带有MAVLink接口的摄像机 3 相机控制和地理标签 4 视频质量差的常见修复方法 5 详细主题 前言 Copter、Plane 和 Rover 最多支持 3 轴云台,包括自动瞄准感兴趣区域(ROI)的相机和自动触发相机快门等先进功能。按…...

MicroBlaze IP核中的外设接口和缓冲器接口介绍
MicroBlaze IP核是Xilinx公司提供的一个嵌入式软核处理器,广泛应用于FPGA设计中。在MicroBlaze IP核中,外设接口和缓冲器接口是处理器与外部设备和内存交互的关键部分。 1 外设接口 MicroBlaze处理器中的AXI4 内存映射外设接口AXI4是一种在Xilinx FPGA设…...
)
Java数据结构与算法(完全背包)
前言: 完全背包问题是背包问题的一个变种,与0/1背包问题不同,在完全背包问题中,每种物品可以被选取多次。问题描述如下: 给定 n 件物品,每件物品有一个重量 wi和一个价值 vi,以及一个背包,它能…...
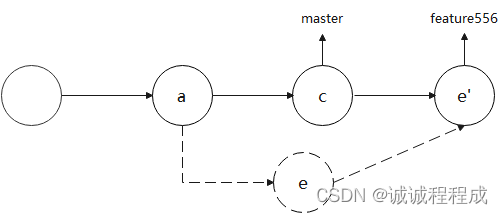
git merge(3个模式) 与 git rebase 图文详解区别
目录 1 git merge1.1 模式一:fast-forward(–ff)1.2 模式二:non-Fast-forward(–no-ff)1.3 模式三:fast-forward only(–ff-only) 2 git rebase3 区别 1 git merge git merge有好几种不同的模式 默认情况下你直接使用 git merge 命令&#x…...

Eclipse 工作空间:深入解析与高效使用
Eclipse 工作空间:深入解析与高效使用 Eclipse 是一款广受欢迎的集成开发环境(IDE),它为各种编程语言提供了强大的开发工具。在 Eclipse 中,工作空间(Workspace)是一个核心概念,它代表了一个项目的集合,这些项目共享相同的配置和设置。本文将深入探讨 Eclipse 工作空…...
Aspose将doc,ppt转成pdf
1.需要引入的jar包 链接: https://pan.baidu.com/s/1t3wqq7KrHi50K9KX3-Eb9A?pwdu4se 提取码: u4se <dependency><groupId>com.aspose</groupId><artifactId>aspose-words-jdk16</artifactId><version>15.8.0</version><scop…...
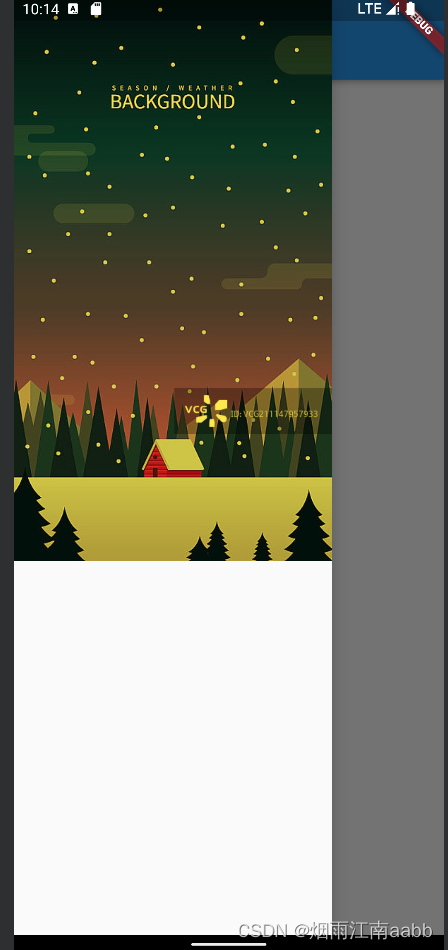
Flutter第十四弹 抽屉菜单效果
目标: 1.怎么构建抽屉菜单效果? 2.抽屉菜单怎么定制? 一、抽屉菜单 侧滑抽屉菜单效果 1.1 抽屉菜单入口 Flutter 的脚手架Scaffold,默认提供了抽屉菜单效果入口。 主页面采用一个简单的页面,侧滑菜单首先使用一个I…...
Docker Nginx
Docker官网 https://www.docker.com/https://www.docker.com/ 删除原先安装的Docker sudo yum remove docker \ docker-client \ docker-client-latest \ docker-common \ docker-latest \ …...
OpenVINO™ 2024.2 发布--推出LLM专属API !服务持续增强,提升AI生成新境界
点击蓝字 关注我们,让开发变得更有趣 作者 | 武卓 博士 排版 | 李擎 Hello, OpenVINO™ 2024.2 对我们来说,这是非常忙碌的几周,因为我们正在努力根据您的反馈改进我们的产品特性,并扩展生态系统以涵盖其它场景和用例。 让我们看看…...
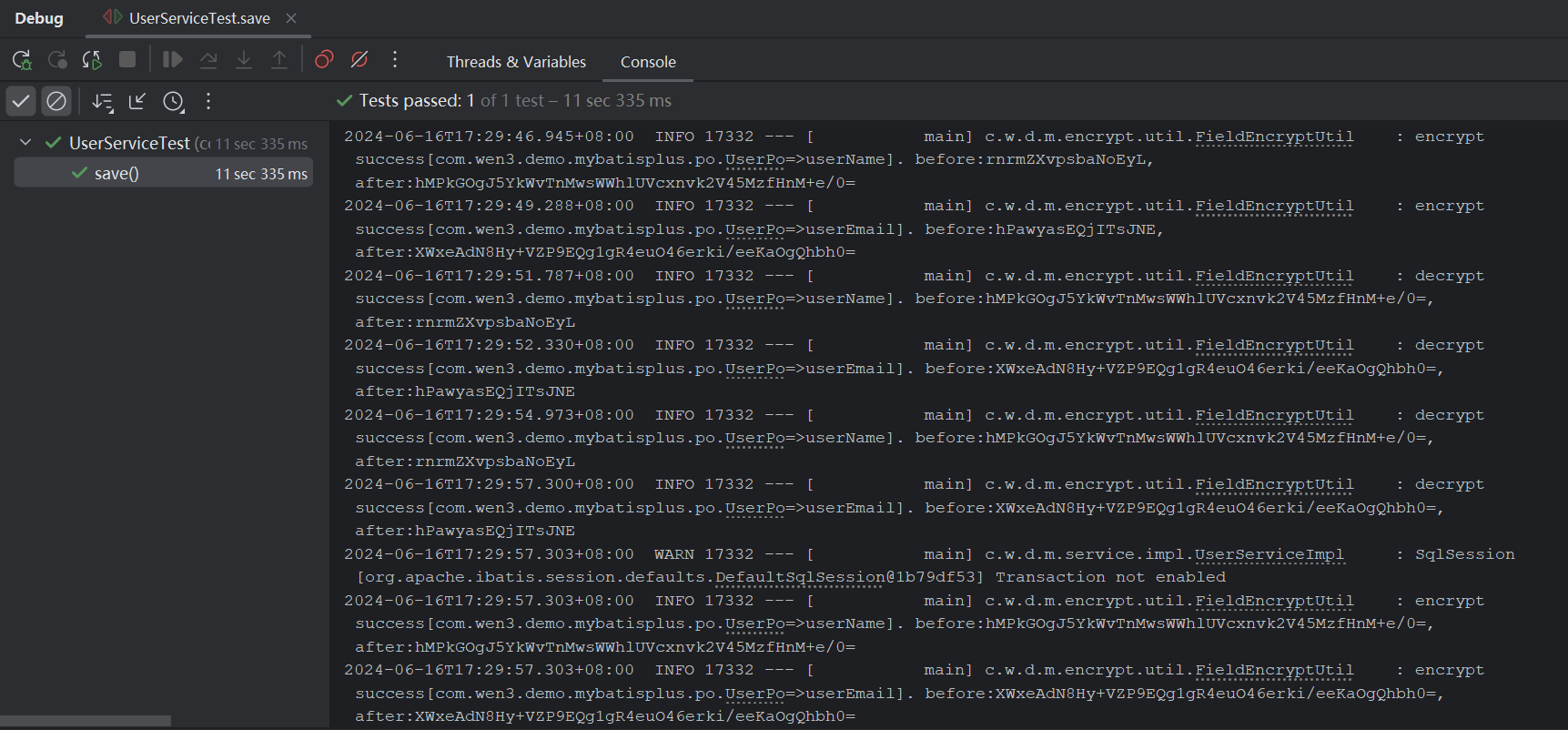
【Mybatis-Plus】根据自定义注解实现自动加解密
背景 我们把数据存到数据库的时候,有些敏感字段是需要加密的,从数据库查出来再进行解密。如果存在多张表或者多个地方需要对部分字段进行加解密操作,每个地方都手写一次加解密的动作,显然不是最好的选择。如果我们使用的是Mybati…...

Window上ubuntu子系统编译Android
Window上ubuntu子系统编译Android 1、编译环境2、WSL2编译报错2.1 You are building on a machine with 11.6GB of RAM2.2 Case-insensitive filesystems not supported3. android模拟器调试 1、编译环境 AOSP : Android源码下载安装java:sudo apt-get install ope…...
【Java学习笔记】异常处理
生活中我们在使用一些产品的时候,经常会碰到一些异常情况。例如,使用ATM机取钱的时,机器会突然出现故障导致无法完成正常的取钱业务,甚至吞卡;在乘坐地铁时,地铁出现异常无法按时启动和运行;使用…...

Ubuntu20.04环境下Baxter机器人开发环境搭建
Ubuntu20.04环境下Baxter机器人开发环境搭建 ubuntu20.04安装 略 安装ROS 略 Baxter机器人依赖安装 主目录创建工作空间,按以下步骤执行 mkdir -p ~/baxter_ws/src source /opt/ros/noetic/setup.bash cd ~/baxter_ws catkin_make catkin_make install s…...
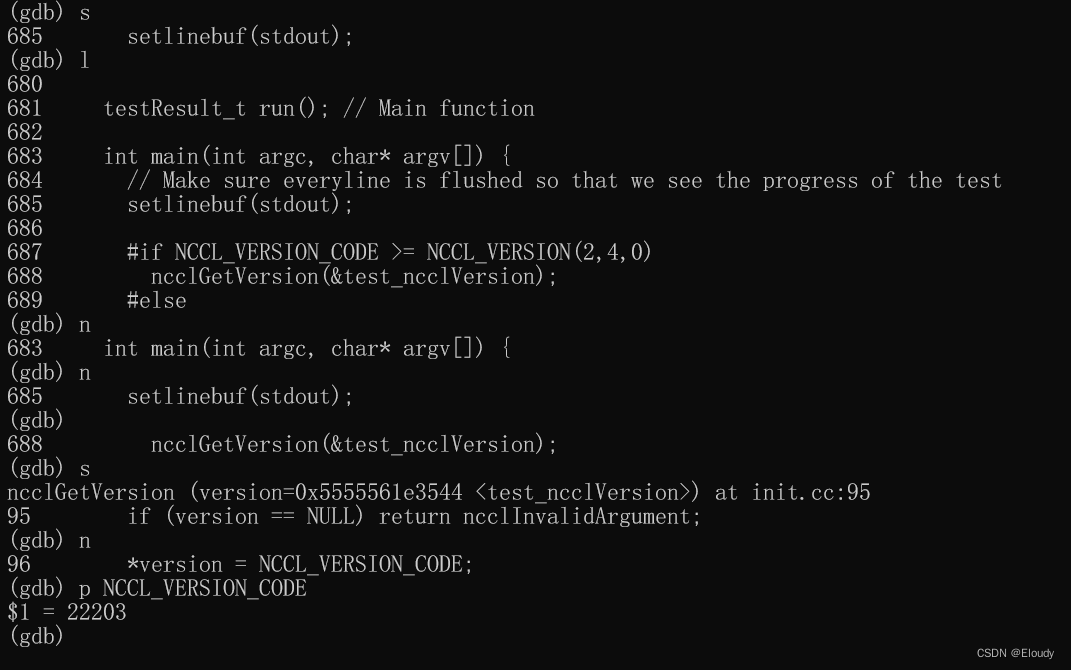
nccl 03 记 回顾:从下载,编译到调试 nccl-test
1, 下载与编译 1.1 源码下载 $ git clone https://github.com/NVIDIA/nccl.git 1.2 编译 1.2.1 一般编译: $ make -j src.build 1.2.2 特定架构gpu 编译 $ make -j src.build NVCC_GENCODE"-gencodearchcompute_80,codesm_80" A10…...

关于车规级功率器件热可靠性测试的分享
随着中国电动汽车市场的稳步快速发展和各大车企布局新能源的扩散,推动了车规级功率器件的快速增长。新能源汽车行业和消费电子都会用到半导体芯片,但车规级芯片对外部环境要求很高,涉及到的一致性和可靠性均要大于工业级产品要求,…...

内核学习——1、list_head
双向循环链表:list_head 头节点head是不使用的: struct list_head { struct list_head *next, *prev; }; 结构体中没有数据域,所以一般把list_head嵌入到其他结构中使用 struct file_node { char c; struct list_head node; }; 此时ÿ…...

JavaEE初阶--网络基本概念
目录 一、引言 二、网络基本概念 2.1 局域网LAN 2.2 广域网WAN 三、网络通信的基础 3.1 IP地址 3.2 端口号 3.3 协议 3.4 五元组 3.5 协议分层 3.6 OSI七层模型 3.7 TCP/IP五层模型 四、总结 一、引言 本篇博客将进入网络编程以及网络原理的学习,但网…...
gitlab-cicd-k8s
k8s已经准备好 kubectl get node 创建cicdYaml文件 kubectl create namespace gitlab-cicd --dry-runclient --outputyaml >> gitlab-cicd.yaml kubectl apply -f gitlab-cicd.yaml 服务器和仓库在一起可用专有地址 使用 GitLab Runner 可以自动执行 GitLab CI/CD 管道…...
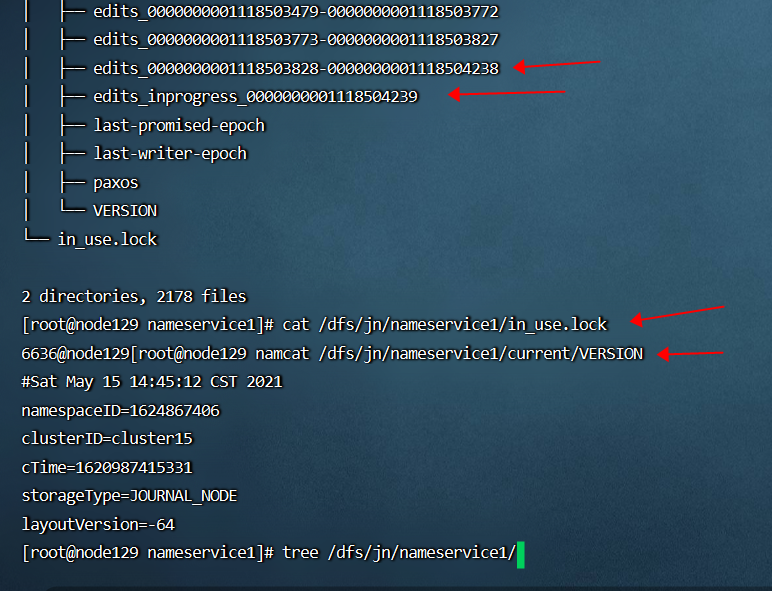
盘点下常见 HDFS JournalNode 异常的问题原因和修复方法
盘点下常见 HDFS JournalNode 异常的问题原因和修复方法 最近在多个客户现场以及公司内部环境,都遇到了因为 JournalNode 异常导致 HDFS 服务不可用的问题,在此总结下相关知识。 1 HDFS HA 高可用和 JournalNode 概述 HDFS namenode 有 SPOF 单点故障…...
)
深入了解python生成器(generator)
生成器 生成器是 Python 中一种特殊类型的迭代器。生成器允许你定义一个函数来动态产生值,而不是一次性生成所有值并将它们存储在内存中。生成器使用 yield 关键字来逐个返回值。每次调用生成器函数时,函数会在 yield 语句暂停,并记住当前的…...

QMCDecode终极指南:一键解锁QQ音乐加密音频的完整解决方案
QMCDecode终极指南:一键解锁QQ音乐加密音频的完整解决方案 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载目录,默…...

Windows 一键部署 OpenClaw 教程|5 分钟搭建本地 AI 智能体,轻松搞定复杂配置
OpenClaw 2.7.1 接入阿里云百炼超详细图文教程 📋 前置准备 本地已安装并能正常运行 OpenClaw 2.7.1 WindowsOpenClaw 顶部 Gateway 保持在线状态拥有可正常登录的阿里云账号网络可正常访问阿里云百炼控制台: https://bailian.console.aliyun.com/cn-be…...

5分钟掌握拼多多数据采集:Scrapy-Pinduoduo爬虫实战指南
5分钟掌握拼多多数据采集:Scrapy-Pinduoduo爬虫实战指南 【免费下载链接】scrapy-pinduoduo 拼多多爬虫,抓取拼多多热销商品信息和评论 项目地址: https://gitcode.com/gh_mirrors/sc/scrapy-pinduoduo 想要获取拼多多平台的热销商品信息和用户评…...

Python统一调用多AI模型:python-tgpt库实战指南
1. 项目概述:一个让Python与AI对话更简单的工具 如果你最近在尝试用Python调用各种大语言模型(LLM)的API,比如OpenAI的GPT、Google的Gemini,或者开源的Llama、Mistral,那你大概率经历过这样的场景…...

从“左撇子困境”看包容性设计:打破设计偏见,提升产品普适性
1. 设计中的“左撇子困境”:一个被忽视的普适性问题作为一名在硬件设计和产品开发领域摸爬滚打了十几年的工程师,我经常和团队讨论“用户体验”和“人机工程学”。这些词听起来高大上,但它们的本质,往往就藏在一些最不起眼的日常细…...
)
别再裸奔了!手把手教你给Nacos 2.x加上用户密码和权限隔离(附Spring Boot配置)
Nacos 2.x安全加固实战:从零构建企业级权限体系 在微服务架构快速迭代的初期,许多团队为了开发效率往往选择"裸奔"模式运行Nacos——不开启任何鉴权机制。这种看似便捷的做法实则暗藏巨大风险:配置信息泄露、服务被恶意注销、敏感数…...

Rust GraphQL实战:async-graphql深度解析
Rust GraphQL实战:async-graphql深度解析 引言 在Rust开发中,GraphQL是构建灵活API的重要技术。作为一名从Python转向Rust的后端开发者,我深刻体会到async-graphql在构建GraphQL服务方面的优势。async-graphql提供了类型安全的Schema定义和异…...
2026.5.13最新版免费下载 转存后自动更新 (看到请立即转存 资源随时失效)pc手机版通用)
冬日狂想曲(赠去马赛克补丁)2026.5.13最新版免费下载 转存后自动更新 (看到请立即转存 资源随时失效)pc手机版通用
下载链接 冬日狂想曲》(Winter Memories)作为《夏日狂想曲》的正统续作,在独立游戏圈、尤其是像素风生活模拟(Life Sim)领域有着极高的讨论度。 针对你提到的内容,我需要先说明:作为一个人工智…...
)
MySQL 安装后安全加固实操:从空密码警告到配置安全远程访问(Ubuntu 18.04 + MySQL 5.7)
MySQL 安全加固实战:从空密码警告到生产级配置 在Ubuntu服务器上部署MySQL数据库时,许多开发者会惊讶地发现安装后竟然可以直接用mysql -uroot无密码登录。这种默认配置在生产环境中无异于敞开大门邀请不速之客。本文将带你完成从基础安装到生产级安全配…...

Steel:专为AI智能体设计的浏览器自动化API与部署实战
1. 项目概述:为AI应用赋能的浏览器自动化引擎 如果你正在构建一个需要与真实网页交互的AI智能体,或者开发一个复杂的浏览器自动化工具,那么你大概率会遇到一个共同的难题:如何稳定、高效地管理浏览器实例?从处理无头Ch…...