SAR动目标检测系列:【4】动目标二维速度估计
在三大类杂波抑制技术(ATI、DPCA和STAP)中,STAP技术利用杂波与动目标在二维空时谱的差异,以信噪比最优为准则,对地杂波抑制的同时有效保留动目标后向散射能量,有效提高运动目标的检测概率和动目标信号输出信杂比,提供理想的动目标检测效果。在检测出动目标之后,接下来的任务是对剩余杂波和噪声中的动目标精确地估计参数。动目标精确参数估计一般是在方位信号中完成的,对图像中感兴趣的动目标的所在的距离门方位信号估计其Doppler参数或运动参数值。由于Doppler参数或运动参数之间存在固定或近似的转换关系,因此Doppler参数和运动参数在动目标聚焦时的作用是等价的。在GMTI中需要准确知道运动参数,以便描述目标的运动趋势,而在动目标成像时,更加注重动目标的Doppler参数。
在对地面动目标进行运动参数估计时,一般会假设动目标航迹向(方位向)和切航迹向(距离向)的速度在回波积累过程中保持不变,采用各类参数估计方法,估计出Doppler参数,然后根据运动参数和Doppler参数之间的关系,得到GMTI所需的运动信息。
SAR动目标速度精确估计一般是通过多基SAR系统实现的。多基线SAR系统不仅为杂波抑制提供了优越的物理条件,而且系统中的各个雷达接收的动目标信号中Doppler参数是不同的(目标自身的运动信息对各雷达是不变的),因此多基线更加有利于实现信号联合处理,提高运动参数估计性能。
1、多基线SAR的动目标成像几何构型
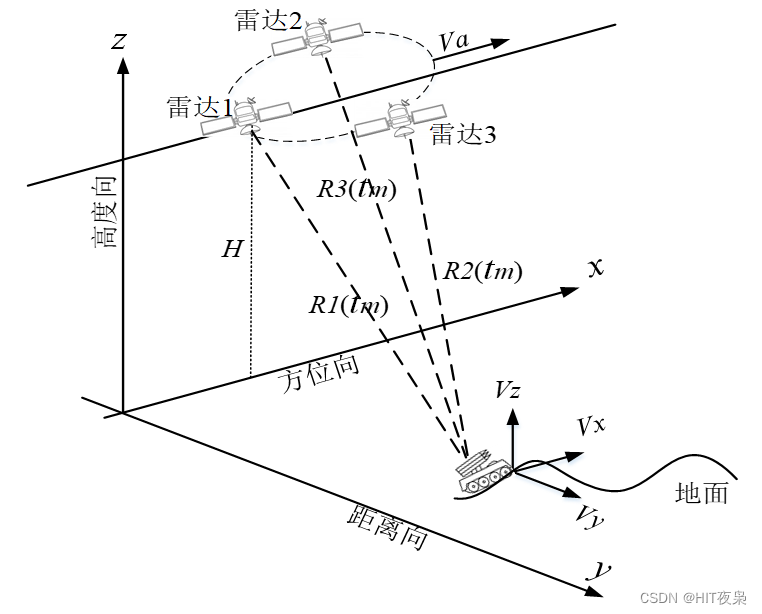
下图 为星载多基线SAR的动目标成像几何。在低轨星载条件下,卫星的有效速度在7100m/s左右,(这里的有效速度指的是引起方位信号多普勒变化的速度,通常卫星的速度比有效速度大6%,而地面波束速度比有效速度小6%),合成孔径时间为0.6秒左右,因此在雷达照射动目标时间内,卫星走过的弧度与照射场景的弧度偏差基本忽略,星座的运行可近似为与地面场景平行。假设星载多基线SAR系统中有3个天线。x–y–z轴分别代表沿航向、地距向和垂直高度向,即大地坐标系左手系。星载多基线SAR系统沿x方向以速度Va飞行,系统高度为H,雷达发射LFM信号。动目标行驶在地面上,(Vx,Vy,Vz)为动目标速度矢量在x–y–z坐标系下的三个分量。运动目标在慢时间tm=0时位于(x0,y0,z0)的位置。
2、多基线SAR动目标回波信号模型
星载多基线SAR系统可用于一发多收(主从模式)和多发多收(非主从模式)两种体制,前者由一颗主卫星和多个伴飞小卫星构成,主星自发自收微波信号,伴飞小卫星只能接收主星发射的信号,在这种体制下,主星的性能要求比较稳定,伴飞小卫星制造成本较小,但是成像范围较小;后一种模式下,各卫星在收发信号方面比较独立,功能一致。无论对那种信号接收体制都涉及到天线协同工作的“三大同步”问题,即时间同步(发射机和接收机工作时间保持同步)、相位同步(在成像的想干积累过程中保持各个天线之间的相干性)和空间同步(也叫波束同步,卫星上的各个天线必须同时照射同一区域)。“三大同步”问题涉及到系统天线设计,信号设计和天线指向调节等内容,这里不做讨论。由于自发自收体制中,各个卫星配置更加灵活,能够实现单独或协同工作模式的快速切换,有利于宽测绘成像,因此下面以自发自收体制为基础研究星载多基线SAR动目标三维速度估计问题。
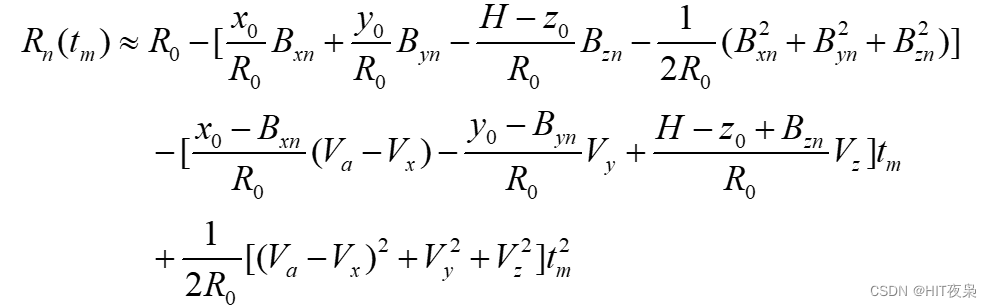
根据上图,动目标在星载多基线SAR第n个天线照射期间的距离历程可表示为

其中,(Bxn,Byn,Bzn)为第n个天线的三维空间基线。上式在星载多基线SAR系统最短斜距R0处关于tm的二阶泰勒展开形式写为
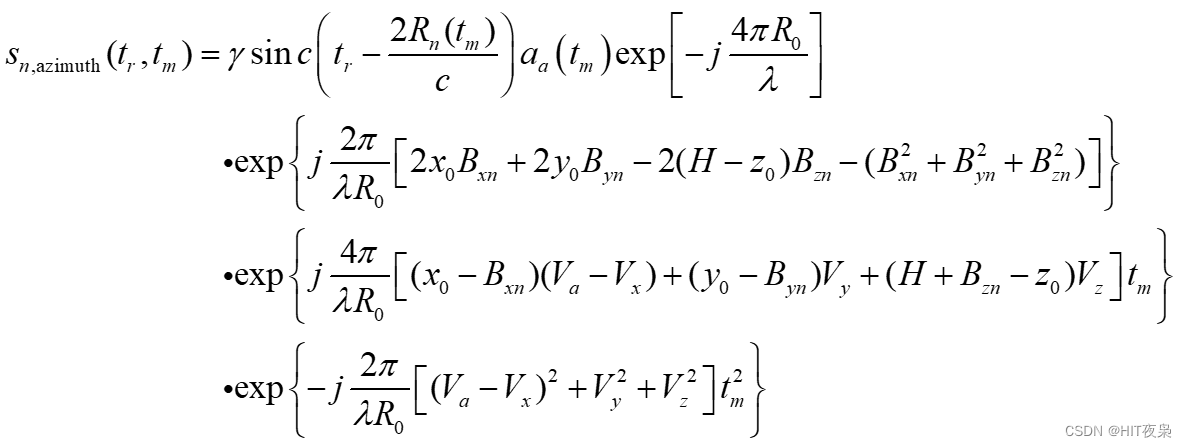
由于雷达发射LFM信号,所以第n个天线接收到地面的回波,经检波及解调后得到复基带信号可表示为

其中,tr为距离快时间,ar(tr)和aa(tm)分别为距离和方位包络函数,为后向散射系数,上式经过匹配滤波完成距离压缩操作后的表达式可写为

对于不同的目标运动形式,上式有不同的表达形式,在这里动目标方位信号的相位可以统一表示为关于tm的q阶多项式形式,即把方位信号看成是PPS。
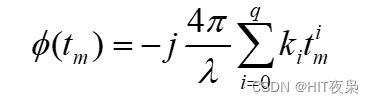
其中,q为展开的多项式总阶数,ki为第i阶多项式相位系数。因此,可得方位信号为二阶PPS
为方便分析,只关心目标方位信号中包含运动信息的相位项。因此方位PPS的相位可写为
这里,

由于二阶PPS为LFM信号,因此Doppler中心频率和Doppler调频率分别写为
在星载SAR-GMTI时,以下两个假设总是成立的:①对于地面或海面目标,其在各个方向的速度分量远远小于卫星的运行速度;②目标的垂直高度远远小于卫星的运行高度。基于以上两个假设,动目标方位信号的Doppler中心频率和Doppler调频率具有以下近似形式
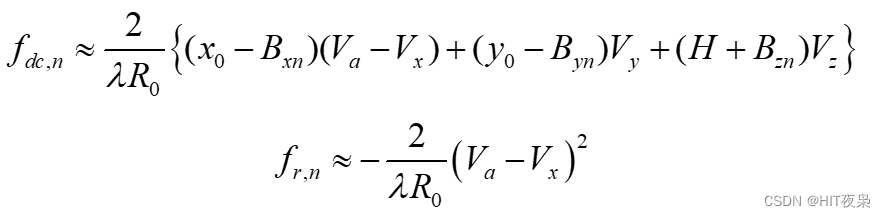
由上式看到,Doppler调频率仅与Vx(方位向速度)这一个未知参数有关,因此通过单个天线就可估计得到方位速度,至于Doppler中心是由距离向速度Vy与Vx的耦合关系构成。
3、多普勒参数估计与速度求解
由上节分析可知,在星载多基线SAR中的动目标方位信号为二阶PPS,即一个LFM信号。对LFM信号进行参数估计普遍采用时频分析技术,其中以Wigner-Ville分布(Wigner-Ville Distribution, WVD)最具代表性。虽然,WVD对LFM信号具有良好的时频聚集性;然而,其非线性变换特征使它难于处理同一距离门内存在多个运动目标的情况。随后,WVD与Radon变换、CLEAN等相结合的算法,以及演进的Cohen类算法,对LFM信号的参数估计从单个目标发展到多个目标;然而,这些算法为了抑制多目标交叉项牺牲了时频谱的分辨率,导致参数估计的精度降低。
分数阶傅里叶变换(Fractional Fourier Transform, FrFT),作为一种线性时频变换算法,它对LFM信号具有非常好的时频聚集性,且不存在交叉项的问题,对于SAR多目标的运动参数估计具有广阔的应用前景。
由前文分析可知,动目标的方位信号为LFM信号,而FrFT对于LFM具有很好的时频聚集性,能够使线性调频信号在某分数阶域实现能量聚集;其次,在同一距离门内存在多个动目标的情况,其回波方位信号表现为多分量LFM信号,在对方位信号进行FrFT操作时,信号调频率不同(即方位速度不同)的分量会在不同的分数阶傅里叶域聚焦,可以有效地区分出不同方位速度的动目标;最后,由于FrFT是线性变换,在对信号进行FrFT操作时,能够有效地在加性噪声中滤出有用信号,算法的鲁棒性高。
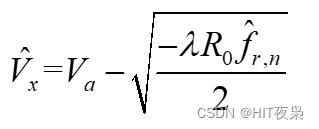
在使用FrFT估计得到信号的多普勒中心和多普勒调频率后,可以首先计算目标的方位向速度
然后,将方位速度带入多普勒中心的表达式,可推导除距离向速度的计算公式

当然,需要提高二维速度的估计精度,还可以使用多极限条件对估计结果进行进一步优化。
相关文章:
SAR动目标检测系列:【4】动目标二维速度估计
在三大类杂波抑制技术(ATI、DPCA和STAP)中,STAP技术利用杂波与动目标在二维空时谱的差异,以信噪比最优为准则,对地杂波抑制的同时有效保留动目标后向散射能量,有效提高运动目标的检测概率和动目标信号输出信杂比,提供理…...
JavaEE多线程(2)
文章目录 1..多线程的安全1.1出现多线程不安全的原因1.2解决多线程不安全的⽅法1.3三种典型死锁场景1.4如何避免死锁问题2.线程等待通知机制2.1等待通知的作用2.2等待通知的方法——wait2.3唤醒wait的方法——notify 1…多线程的安全 1.1出现多线程不安全的原因 线程在系统中…...

中新赛克两款数据安全产品成功获得“可信数安”评估测试证书
6月19日,2024数据智能大会在北京盛大召开。 会上,中国2024年上半年度“可信数安”评估测试证书正式颁发。中新赛克两款参评产品凭借过硬的技术水准和卓越的应用效果,成功获得专项测试证书。 2024年上半年度“可信数安”评估测试通过名单 中新…...
代码随想录——分割回文串(Leetcode 131)
题目链接 回溯 class Solution {List<List<String>> res new ArrayList<List<String>>();List<String> list new ArrayList<String>();public List<List<String>> partition(String s) {backtracking(s, 0);return res;}p…...

Rust 学习方法及学习路线汇总
Rust 学习方法及学习路线汇总 Rust 是一种系统编程语言,旨在提供安全性、并发性和高性能。它是由 Mozilla 公司开发的,于 2010 年首次发布。Rust 能够帮助开发者编写可靠和高效的软件,因此受到了广泛的关注和认可。 如果你有兴趣学习 Rust&…...
一名女DBA的感谢信,到底发生了什么?
昨日我们收到这样一通来电 “早上九点刚上班便收到业务投诉电话,系统卡顿,接口失败率大增,怀疑数据库问题。打开运维平台发现是国产库,生无可恋,第一次生产环境遇到国产库性能问题,没什么排查经验…...
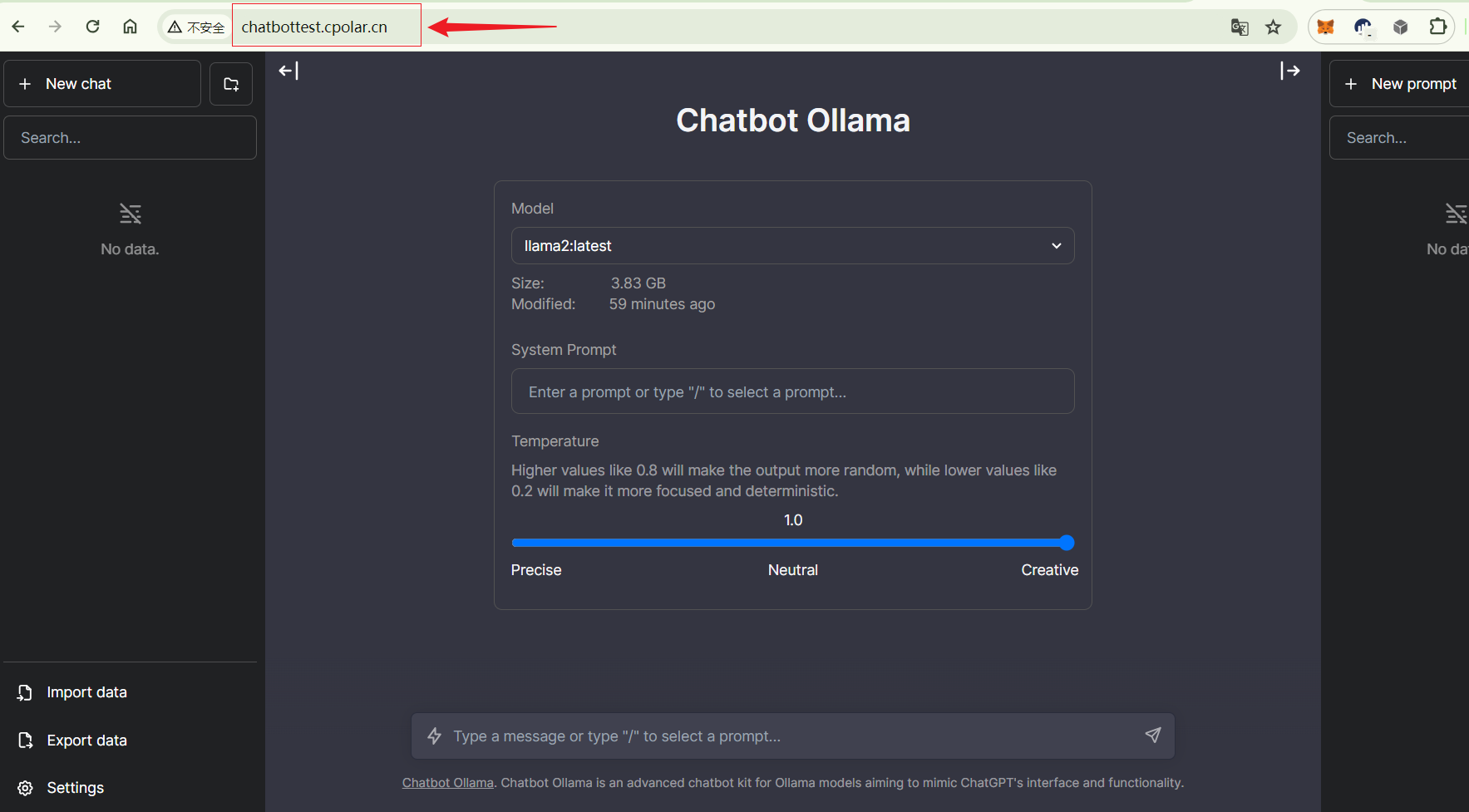
群晖NAS本地部署并运行一个基于大语言模型Llama2的个人本地聊天机器人
前言 本文主要分享如何在群晖 NAS 本地部署并运行一个基于大语言模型 Llama 2 的个人本地聊天机器人并结合内网穿透工具发布到公网远程访问。本地部署对设备配置要求高一些,如果想要拥有比较好的体验,可以使用高配置的服务器设备. 目前大部分大语言模型的产品都是基于网络线上…...
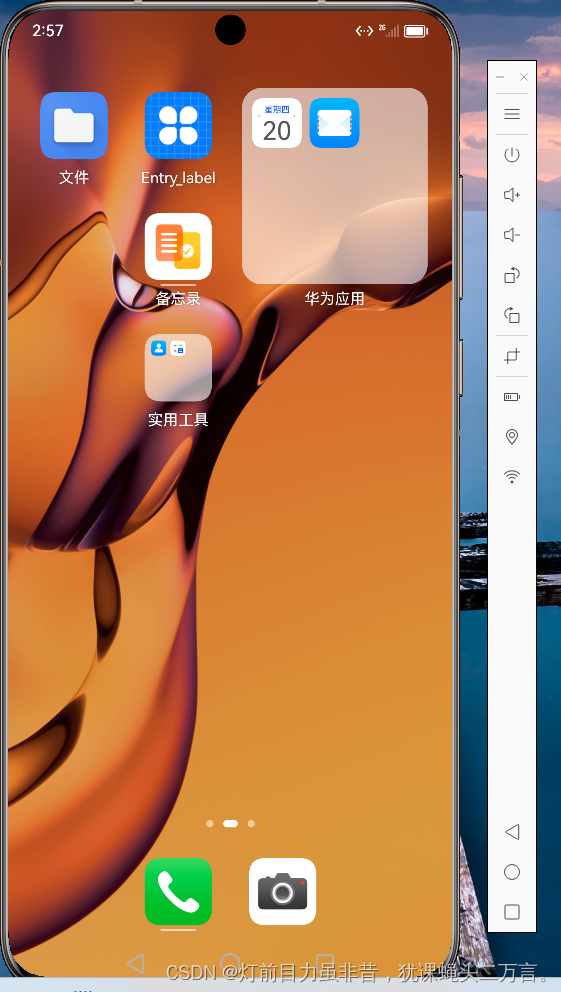
HarmonyOS模拟器(phone-x86-api9)一直卡顿的解决方法
在DevEco Studio 3.1.1 Release版本中的Device Manager中创建本地的模拟器,创建phone-x86-api9模拟器成功,但是启动该新建的模拟器一直显示"HarmonyOS"logo图片,然后一直卡在这里,运行结果如下所示: 检查模…...

排序题目:有序数组的平方
文章目录 题目标题和出处难度题目描述要求示例数据范围进阶 解法一思路和算法代码复杂度分析 解法二思路和算法代码复杂度分析 题目 标题和出处 标题:有序数组的平方 出处:977. 有序数组的平方 难度 2 级 题目描述 要求 给定按非递减顺序排序的整…...

PPT可以转换成Word吗?归纳了三种转换方式
PPT可以转换成Word吗?在当今快节奏的工作和学习环境中,不同格式文件之间的转换变得日益重要。PPT作为演示文稿制作的首选工具,广泛应用于会议演讲、教育培训等多个场景,而Word则是文档编辑与编排的基石。为了便于进一步编辑、分享…...
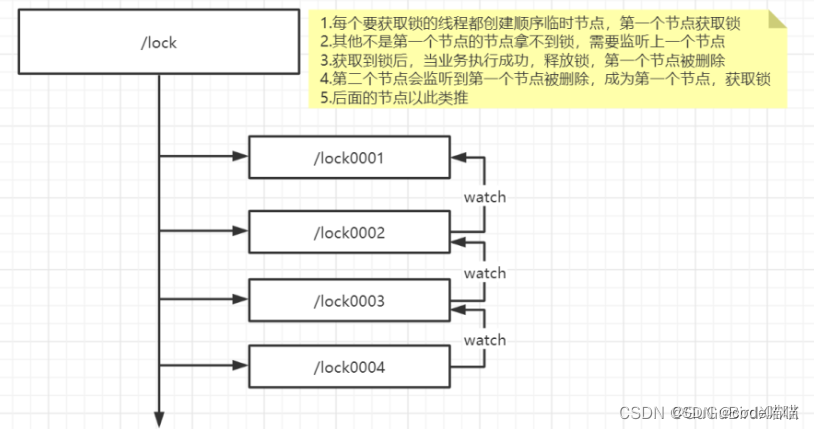
分布式锁三种方案
基于数据库的分布式锁(基于主键id和唯一索引) 1基于主键实现分布式锁 2基于唯一索引实现分布式锁 其实原理一致,都是采用一个唯一的标识进行判断是否加锁。 原理:通过主键或者唯一索性两者都是唯一的特性,如果多个…...
【HarmonyOS NEXT】har 包的构建生成过程
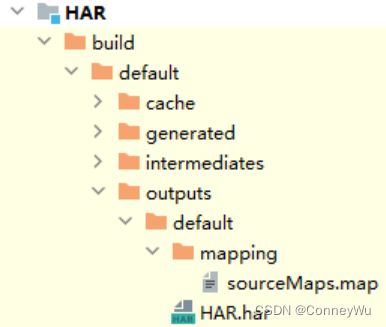
Har模块文件结构 构建HAR 打包规则 开源HAR除了默认不需要打包的文件(build、node_modules、oh_modules、.cxx、.previewer、.hvigor、.gitignore、.ohpmignore)和.gitignore/.ohpmignore中配置的文件,cpp工程的CMakeLists.txt,…...
)
从0开发一个Chrome插件:项目实战——翻译插件(附带申请谷歌翻译、百度翻译教程)
前言 这是《从0开发一个Chrome插件》系列的第十八篇文章,本系列教你如何从0去开发一个Chrome插件,每篇文章都会好好打磨,写清楚我在开发过程遇到的问题,还有开发经验和技巧。 专栏: 从0开发一个Chrome插件:什么是Chrome插件?从0开发一个Chrome插件:开发Chrome插件的必…...

查看nginx安装/配置路径,一个服务器启动两个nginx
查看nginx安装/配置路径 查看nginx的pid: ps -ef | grep nginx查看pid对应服务的启动路径 ll /proc/2320/exe使用检查配置文件命令,查看配置文件位置 /usr/local/nginx/sbin/nginx -t一个服务启动两个nginx 拷贝一份程序,cpbin是我自己创…...

JavaScript中 Map与reduce的应用
1. Map:映射新世界 Map构造函数创建一个新Map对象,它允许你以键值对的形式存储数据,提供了一种更加灵活的数据结构。与传统的对象相比,Map允许任何值(包括对象)作为键,而且具有更好的性能表现。…...

1688商品详情API:一键解锁海量批发数据
引言 1688作为阿里巴巴旗下的B2B交易平台,拥有庞大的商品数据库和丰富的供应商资源。对于想要获取商品详细信息的开发者和企业而言,1688提供的API接口是获取一手数据的关键途径。本文将详细介绍如何使用1688商品详情API,包括注册、获取API密…...
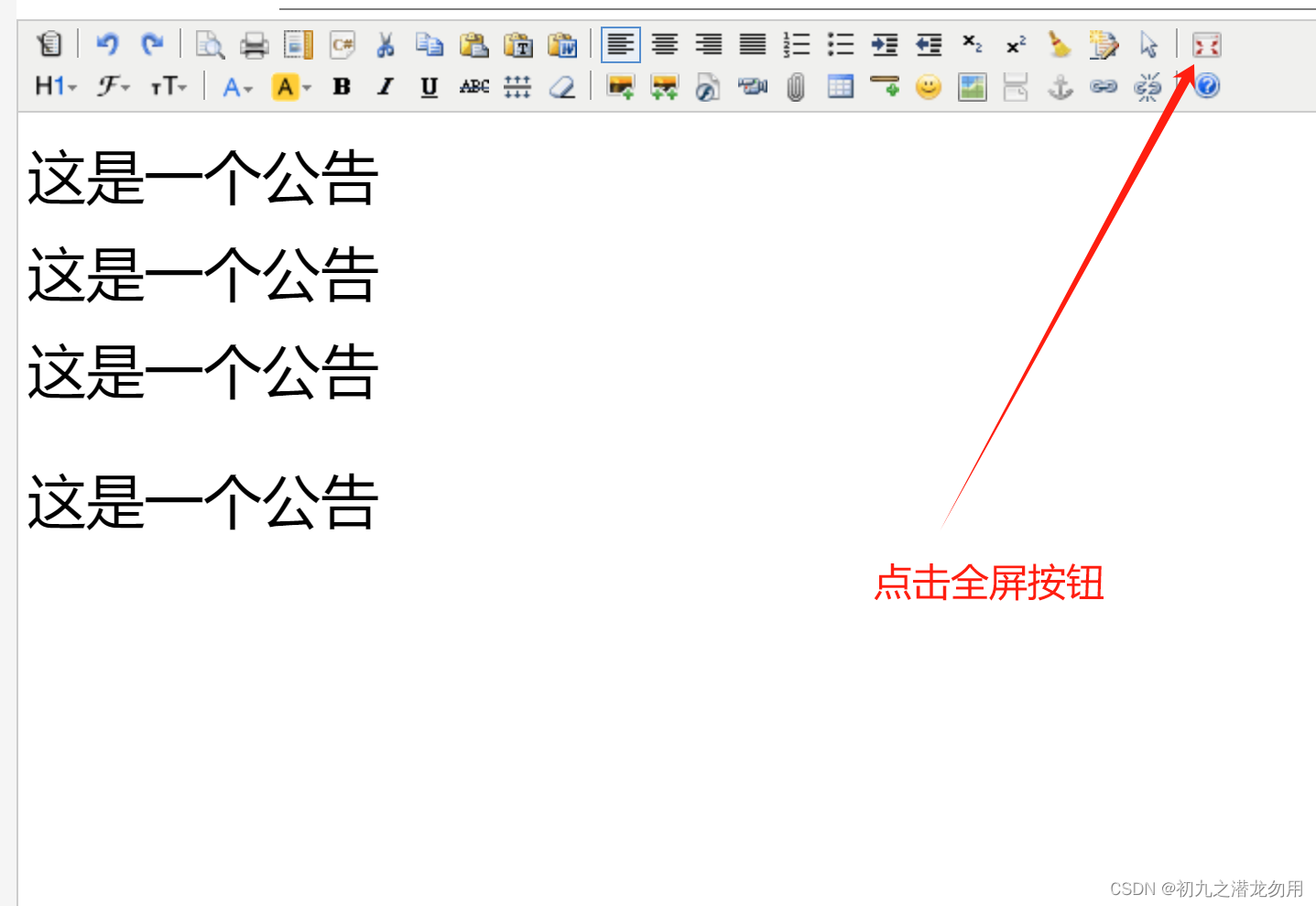
C#结合JS 修改解决 KindEditor 弹出层问题
目录 问题现象 原因分析 范例运行环境 解决问题 修改 kindeditor.js C# 服务端更新 小结 问题现象 KindEditor 是一款出色的富文本HTML在线编辑器,关于编辑器的详细介绍可参考我的文章《C# 将 TextBox 绑定为 KindEditor 富文本》,这里我们讲述在…...
二开的精美UI站长源码分享论坛网站源码 可切换皮肤界面
二开的精美UI站长源码分享论坛网站源码 可切换皮肤界面 二开的精美UI站长源码分享论坛网站源码 可切换皮肤界面...
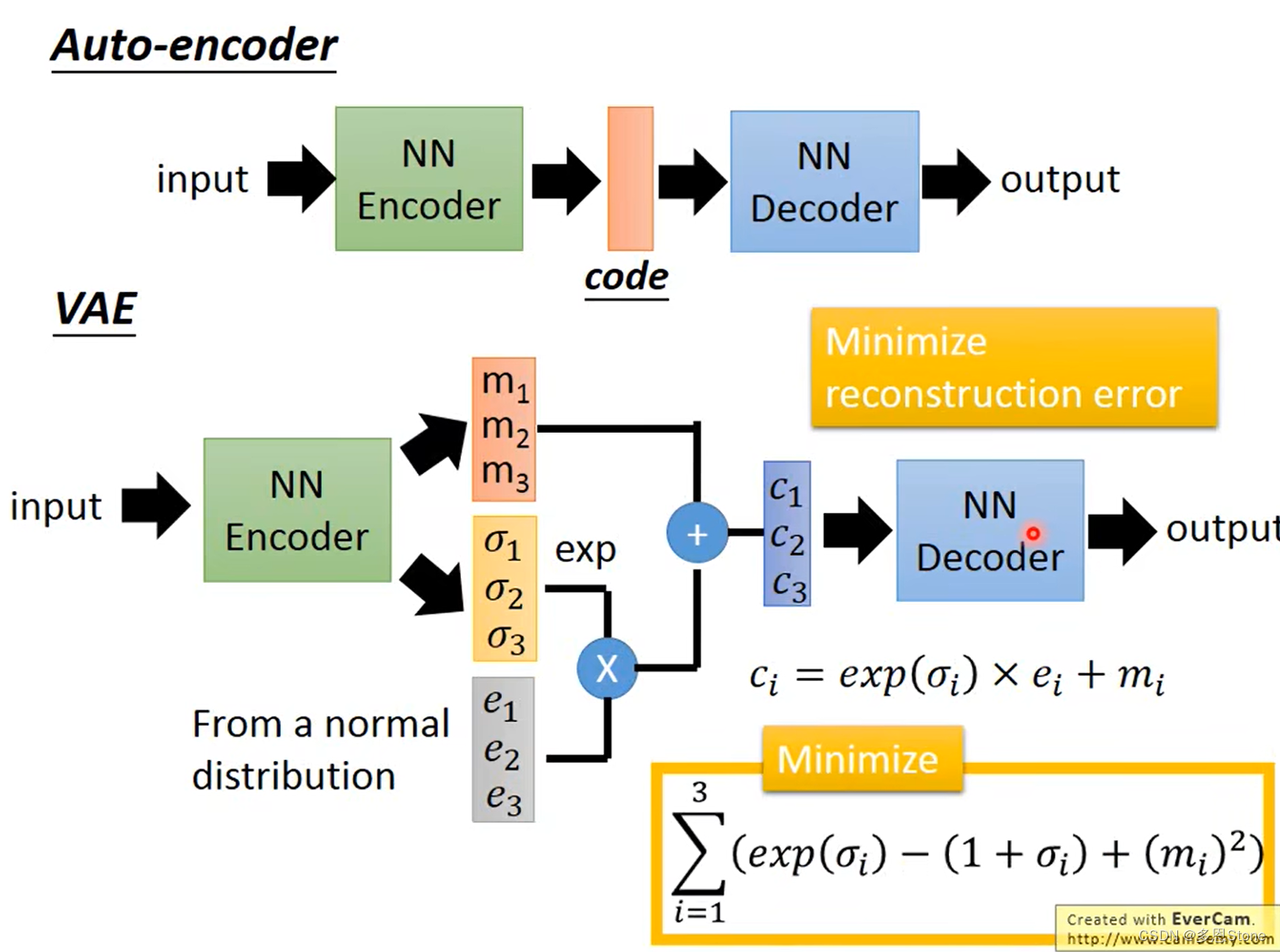
【diffusers极速入门(三)】生成的图像尺寸与 UNet 和 VAE 之间的关系
先上结论,一句话总结即: SD 图片的输入\输出尺寸(高或宽) Unet 输入\输出的样本尺寸(高或宽) x VAE 的缩放尺寸 在使用生成模型时,特别是图像生成任务中,理解 UNet 和 VAE…...

react实现窗口悬浮框,可拖拽、折叠、滚动
1、效果如下 2、如下两个文件不需要修改 drag.js import React from "react"; import PropTypes from "prop-types";export default class DragM extends React.Component {static propTypes {children: PropTypes.element.isRequired};static defaultP…...

PowerToys中文汉化终极指南:3步快速实现Windows效率工具完全本地化
PowerToys中文汉化终极指南:3步快速实现Windows效率工具完全本地化 【免费下载链接】PowerToys-CN PowerToys Simplified Chinese Translation 微软增强工具箱 自制汉化 项目地址: https://gitcode.com/gh_mirrors/po/PowerToys-CN 你是否曾因PowerToys的英文…...

终极解决方案:一键将LaTeX PDF幻灯片转换为PowerPoint格式
终极解决方案:一键将LaTeX PDF幻灯片转换为PowerPoint格式 【免费下载链接】pdf2pptx Convert your (Beamer) PDF slides to (Powerpoint) PPTX 项目地址: https://gitcode.com/gh_mirrors/pd/pdf2pptx 还在为LaTeX Beamer制作的精美幻灯片无法在PowerPoint中…...
)
从劝退到离不开:Vim新手入门实战博客(附高效技巧)
文章目录前言💙一、vim是什么?💜二、为什么要学习vim?💚三、vim总览💔四、vim的基本操作4.1vim正常模式命令集(命令模式)4.2vim底行模式命令集4.3vim视图模式💗五、一些小技巧💖六、…...

给视觉开发新手的保姆级教程:在Ubuntu上从下载源码到成功运行Demo,搞定OpenCV 3环境搭建
给视觉开发新手的保姆级教程:在Ubuntu上从下载源码到成功运行Demo,搞定OpenCV 3环境搭建 第一次在Ubuntu上搭建OpenCV开发环境,对很多视觉开发新手来说可能是个令人望而生畏的任务。命令行操作、编译工具链、环境配置……这些术语听起来就让人…...

保姆级教程:手把手教你用MuJoCo和Spinning Up让UR5机械臂学会‘指哪打哪’
从零实现UR5机械臂强化学习控制:MuJoCo与Spinning Up实战指南 看着实验室里崭新的UR5机械臂,你是否想过让它像人类手臂一样灵活地指向任意位置?传统控制方法需要复杂的运动学计算,而强化学习能让机械臂通过"试错"自主掌…...

Flow区块链开发:用AI规则库提升Cadence智能合约与FCL前端开发效率
1. 项目概述与核心价值 如果你正在Flow区块链上用Cadence语言开发智能合约,并且恰好也在用Cursor这样的AI辅助编程工具,那你可能和我一样,经历过一个有点“分裂”的阶段。一方面,Cadence作为一门资源导向型语言,其独特…...

别再傻傻分不清!用Python+Matplotlib手把手教你画出NBI和WBI的频谱与时频图
用PythonMatplotlib实战解析NBI与WBI的频谱与时频特性 在信号处理领域,窄带干扰(NBI)和宽带干扰(WBI)的区分对雷达系统、通信工程等应用至关重要。理论教材中复杂的数学公式常常让初学者望而生畏,而可视化呈现能瞬间让抽象概念变得直观可感。本文将带您用…...

5分钟快速上手JD-GUI:免费Java反编译工具的完整实战指南
5分钟快速上手JD-GUI:免费Java反编译工具的完整实战指南 【免费下载链接】jd-gui A standalone Java Decompiler GUI 项目地址: https://gitcode.com/gh_mirrors/jd/jd-gui 你是否曾面对一个只有.class文件的Java项目,却急于想了解它的内部实现&a…...

嵌入式开发中的编程规范实践与行业标准解析
1. 编程规范的本质与价值在嵌入式汽车电子领域干了十五年,我见过太多因为代码不规范导致的惨痛教训。有一次,某车企的ECU控制模块在零下30度环境突然死机,排查三周后发现是未初始化的指针在低温环境下产生了非预期行为——这种问题本可以通过…...

Apple Mail自动化增强:JXA脚本与快捷指令提升邮件处理效率
1. 项目概述:一个为Apple Mail打造的现代化邮件客户端如果你和我一样,日常工作高度依赖邮件,并且是macOS生态的深度用户,那么Apple Mail(邮件.app)大概率是你的主力工具。它简洁、与系统深度集成、iCloud同…...