椭圆的矩阵表示法
椭圆的矩阵表示法
flyfish
1. 标准几何表示法
标准几何表示法是通过椭圆的几何定义来表示的:
x 2 a 2 + y 2 b 2 = 1 \frac{x^2}{a^2} + \frac{y^2}{b^2} = 1 a2x2+b2y2=1其中, a a a 是椭圆的长半轴长度, b b b 是椭圆的短半轴长度。

2. 线性代数表示法
线性代数表示法是通过椭圆的二次型表示的:
x T Σ − 1 x = c \mathbf{x}^T \Sigma^{-1} \mathbf{x} = c xTΣ−1x=c其中, x \mathbf{x} x 是点的向量表示 ( x y ) \begin{pmatrix} x \\ y \end{pmatrix} (xy), Σ \Sigma Σ 是一个正定矩阵(协方差矩阵的逆), c c c 是一个常数。
推导两者之间的关系
我们通过具体推导来看这两者之间的关系:
假设我们有一个标准形式的椭圆方程:
x 2 a 2 + y 2 b 2 = 1 \frac{x^2}{a^2} + \frac{y^2}{b^2} = 1 a2x2+b2y2=1
可以将其改写为矩阵形式:
( x y ) ( 1 a 2 0 0 1 b 2 ) ( x y ) = 1 \begin{pmatrix} x & y \end{pmatrix} \begin{pmatrix} \frac{1}{a^2} & 0 \\ 0 & \frac{1}{b^2} \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} = 1 (xy)(a2100b21)(xy)=1在这里,矩阵 ( 1 a 2 0 0 1 b 2 ) \begin{pmatrix} \frac{1}{a^2} & 0 \\ 0 & \frac{1}{b^2} \end{pmatrix} (a2100b21) 就是 Σ − 1 \Sigma^{-1} Σ−1,而常数 c = 1 c = 1 c=1。
因此,标准形式的椭圆方程可以被视为线性代数表示法的一种特例,其中:
Σ − 1 = ( 1 a 2 0 0 1 b 2 ) \Sigma^{-1} = \begin{pmatrix} \frac{1}{a^2} & 0 \\ 0 & \frac{1}{b^2} \end{pmatrix} Σ−1=(a2100b21)
这也意味着:
Σ = ( a 2 0 0 b 2 ) \Sigma = \begin{pmatrix} a^2 & 0 \\ 0 & b^2 \end{pmatrix} Σ=(a200b2)
更一般的情况
如果椭圆不是标准形式的(例如旋转过或者平移过的椭圆),其线性代数表示法中的矩阵 Σ \Sigma Σ 将不是对角矩阵,而是一个包含非零的非对角元素的矩阵。
1. 椭圆的几何定义
设椭圆的两个焦点分别为 F 1 ( − c , 0 ) F_1(-c, 0) F1(−c,0) 和 F 2 ( c , 0 ) F_2(c, 0) F2(c,0),椭圆上的任意一点 P ( x , y ) P(x, y) P(x,y) 满足以下条件:
P F 1 + P F 2 = 2 a PF_1 + PF_2 = 2a PF1+PF2=2a
其中, 2 a 2a 2a 是椭圆的长轴长度, a a a 是长半轴的长度。
2. 代入距离公式
根据距离公式,可以得到 P P P 到 F 1 F_1 F1 和 F 2 F_2 F2 的距离分别为:
P F 1 = ( x + c ) 2 + y 2 PF_1 = \sqrt{(x + c)^2 + y^2} PF1=(x+c)2+y2
P F 2 = ( x − c ) 2 + y 2 PF_2 = \sqrt{(x - c)^2 + y^2} PF2=(x−c)2+y2根据椭圆的定义,有:
( x + c ) 2 + y 2 + ( x − c ) 2 + y 2 = 2 a \sqrt{(x + c)^2 + y^2} + \sqrt{(x - c)^2 + y^2} = 2a (x+c)2+y2+(x−c)2+y2=2a
3. 消除根号
为了简化这个方程,我们首先将方程两边平方:
( ( x + c ) 2 + y 2 + ( x − c ) 2 + y 2 ) 2 = ( 2 a ) 2 \left( \sqrt{(x + c)^2 + y^2} + \sqrt{(x - c)^2 + y^2} \right)^2 = (2a)^2 ((x+c)2+y2+(x−c)2+y2)2=(2a)2展开左边:
( x + c ) 2 + y 2 + ( x − c ) 2 + y 2 + 2 ( ( x + c ) 2 + y 2 ) ( ( x − c ) 2 + y 2 ) = 4 a 2 (x + c)^2 + y^2 + (x - c)^2 + y^2 + 2 \sqrt{((x + c)^2 + y^2)((x - c)^2 + y^2)} = 4a^2 (x+c)2+y2+(x−c)2+y2+2((x+c)2+y2)((x−c)2+y2)=4a2
4. 凑平方差
我们先简化左边的前两项:
( x + c ) 2 + y 2 + ( x − c ) 2 + y 2 = x 2 + 2 x c + c 2 + y 2 + x 2 − 2 x c + c 2 + y 2 (x + c)^2 + y^2 + (x - c)^2 + y^2 = x^2 + 2xc + c^2 + y^2 + x^2 - 2xc + c^2 + y^2 (x+c)2+y2+(x−c)2+y2=x2+2xc+c2+y2+x2−2xc+c2+y2
= 2 x 2 + 2 y 2 + 2 c 2 = 2x^2 + 2y^2 + 2c^2 =2x2+2y2+2c2代入上面的方程得到:
2 x 2 + 2 y 2 + 2 c 2 + 2 ( ( x + c ) 2 + y 2 ) ( ( x − c ) 2 + y 2 ) = 4 a 2 2x^2 + 2y^2 + 2c^2 + 2 \sqrt{((x + c)^2 + y^2)((x - c)^2 + y^2)} = 4a^2 2x2+2y2+2c2+2((x+c)2+y2)((x−c)2+y2)=4a2移项得到:
2 ( ( x + c ) 2 + y 2 ) ( ( x − c ) 2 + y 2 ) = 4 a 2 − 2 x 2 − 2 y 2 − 2 c 2 2 \sqrt{((x + c)^2 + y^2)((x - c)^2 + y^2)} = 4a^2 - 2x^2 - 2y^2 - 2c^2 2((x+c)2+y2)((x−c)2+y2)=4a2−2x2−2y2−2c2
( ( x + c ) 2 + y 2 ) ( ( x − c ) 2 + y 2 ) = 2 a 2 − x 2 − y 2 − c 2 \sqrt{((x + c)^2 + y^2)((x - c)^2 + y^2)} = 2a^2 - x^2 - y^2 - c^2 ((x+c)2+y2)((x−c)2+y2)=2a2−x2−y2−c2
5. 消去根号
为了继续消去根号,我们再次平方两边:
( ( ( x + c ) 2 + y 2 ) ( ( x − c ) 2 + y 2 ) ) 2 = ( 2 a 2 − x 2 − y 2 − c 2 ) 2 \left( \sqrt{((x + c)^2 + y^2)((x - c)^2 + y^2)} \right)^2 = (2a^2 - x^2 - y^2 - c^2)^2 (((x+c)2+y2)((x−c)2+y2))2=(2a2−x2−y2−c2)2展开左边:
( ( x + c ) 2 + y 2 ) ( ( x − c ) 2 + y 2 ) = ( 2 a 2 − x 2 − y 2 − c 2 ) 2 ((x + c)^2 + y^2)((x - c)^2 + y^2) = (2a^2 - x^2 - y^2 - c^2)^2 ((x+c)2+y2)((x−c)2+y2)=(2a2−x2−y2−c2)2
6. 简化方程
左边的展开:
( x 2 + 2 x c + c 2 + y 2 ) ( x 2 − 2 x c + c 2 + y 2 ) (x^2 + 2xc + c^2 + y^2)(x^2 - 2xc + c^2 + y^2) (x2+2xc+c2+y2)(x2−2xc+c2+y2)
= ( x 2 + y 2 + c 2 ) 2 − ( 2 x c ) 2 = (x^2 + y^2 + c^2)^2 - (2xc)^2 =(x2+y2+c2)2−(2xc)2
= ( x 2 + y 2 + c 2 ) 2 − 4 x 2 c 2 = (x^2 + y^2 + c^2)^2 - 4x^2c^2 =(x2+y2+c2)2−4x2c2右边的展开:
( 2 a 2 − x 2 − y 2 − c 2 ) 2 (2a^2 - x^2 - y^2 - c^2)^2 (2a2−x2−y2−c2)2
= 4 a 4 − 4 a 2 ( x 2 + y 2 + c 2 ) + ( x 2 + y 2 + c 2 ) 2 = 4a^4 - 4a^2(x^2 + y^2 + c^2) + (x^2 + y^2 + c^2)^2 =4a4−4a2(x2+y2+c2)+(x2+y2+c2)2令左边和右边相等:
( x 2 + y 2 + c 2 ) 2 − 4 x 2 c 2 = 4 a 4 − 4 a 2 ( x 2 + y 2 + c 2 ) + ( x 2 + y 2 + c 2 ) 2 (x^2 + y^2 + c^2)^2 - 4x^2c^2 = 4a^4 - 4a^2(x^2 + y^2 + c^2) + (x^2 + y^2 + c^2)^2 (x2+y2+c2)2−4x2c2=4a4−4a2(x2+y2+c2)+(x2+y2+c2)2相消掉相同项后:
− 4 x 2 c 2 = 4 a 4 − 4 a 2 ( x 2 + y 2 + c 2 ) - 4x^2c^2 = 4a^4 - 4a^2(x^2 + y^2 + c^2) −4x2c2=4a4−4a2(x2+y2+c2)
x 2 c 2 = a 2 ( x 2 + y 2 + c 2 ) − a 4 x^2c^2 = a^2(x^2 + y^2 + c^2) - a^4 x2c2=a2(x2+y2+c2)−a4由于 c 2 = a 2 − b 2 c^2 = a^2 - b^2 c2=a2−b2,我们将其代入上式中:
x 2 ( a 2 − b 2 ) = a 2 ( x 2 + y 2 + ( a 2 − b 2 ) ) − a 4 x^2(a^2 - b^2) = a^2(x^2 + y^2 + (a^2 - b^2)) - a^4 x2(a2−b2)=a2(x2+y2+(a2−b2))−a4
x 2 a 2 − x 2 b 2 = a 2 x 2 + a 2 y 2 + a 4 − a 2 b 2 − a 4 x^2a^2 - x^2b^2 = a^2x^2 + a^2y^2 + a^4 - a^2b^2 - a^4 x2a2−x2b2=a2x2+a2y2+a4−a2b2−a4
x 2 a 2 − x 2 b 2 = a 2 x 2 + a 2 y 2 − a 2 b 2 x^2a^2 - x^2b^2 = a^2x^2 + a^2y^2 - a^2b^2 x2a2−x2b2=a2x2+a2y2−a2b2整理后得到:
− x 2 b 2 = a 2 y 2 − a 2 b 2 -x^2b^2 = a^2y^2 - a^2b^2 −x2b2=a2y2−a2b2
x 2 b 2 = a 2 b 2 − a 2 y 2 x^2b^2 = a^2b^2 - a^2y^2 x2b2=a2b2−a2y2
x 2 a 2 + y 2 b 2 = 1 \frac{x^2}{a^2} + \frac{y^2}{b^2} = 1 a2x2+b2y2=1
最终的标准椭圆方程
x 2 a 2 + y 2 b 2 = 1 \frac{x^2}{a^2} + \frac{y^2}{b^2} = 1 a2x2+b2y2=1
相关文章:
椭圆的矩阵表示法
椭圆的矩阵表示法 flyfish 1. 标准几何表示法 标准几何表示法是通过椭圆的几何定义来表示的: x 2 a 2 y 2 b 2 1 \frac{x^2}{a^2} \frac{y^2}{b^2} 1 a2x2b2y21其中, a a a 是椭圆的长半轴长度, b b b 是椭圆的短半轴长度。 2.…...
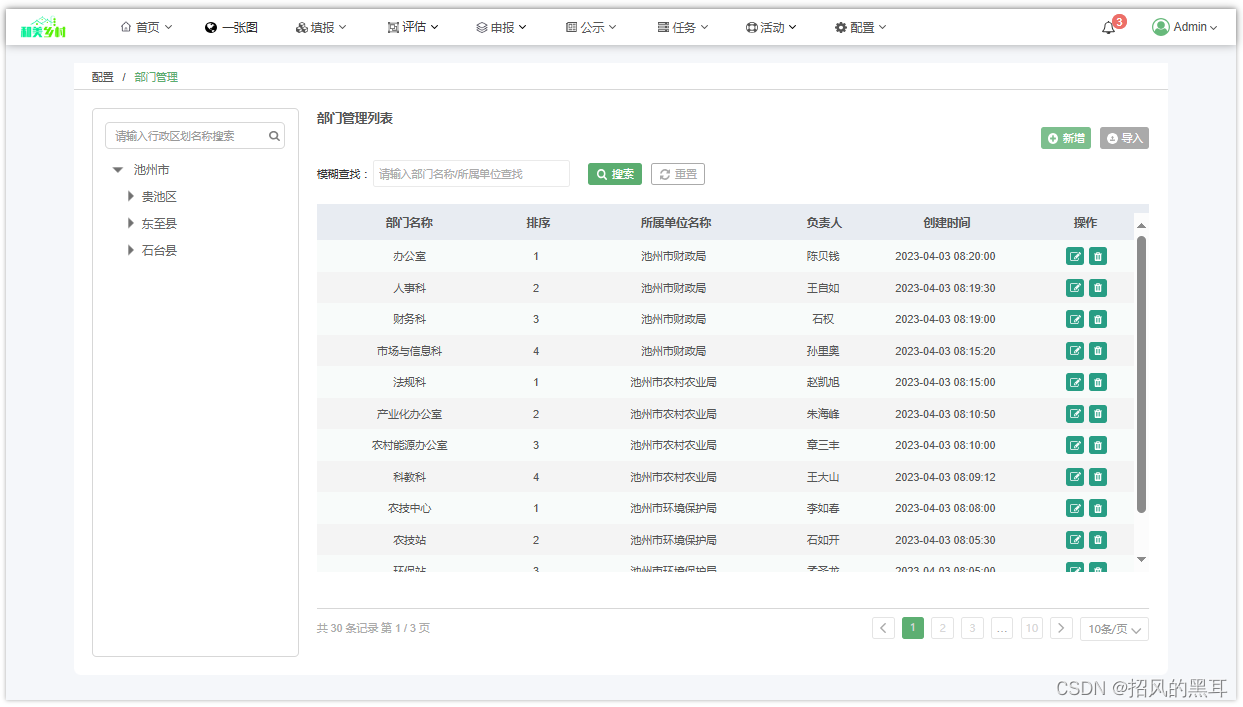
智慧乡村和美人家信息化系统
一、简介 智慧乡村和美人家信息化系统是一个综合管理平台,集成了首页概览、一张图可视化、数据填报、智能评估、便捷申报、公开公示、任务管理、活动发布和灵活配置等功能。该系统不仅提升了乡村管理效率,也优化了家庭生活的便捷性。通过一张图…...

ios-deploy - Required for installing your app on a physical device with the CLI
ios-deploy 是一个用于在 iOS 设备上安装、调试和运行 iOS 应用的开源工具。如果你正在使用命令行界面(CLI)来部署 React Native 或其他原生 iOS 应用到物理设备,那么安装 ios-deploy 是必要的。 以下是安装 ios-deploy 的一般步骤ÿ…...
thinkphp5使用模型删除与复杂查询EXP
模型删除 应用软删除 表中需要有字段,deletetime 模型中使用下面方法 use SoftDelete;protected $deleteTime delete_time;真实删除 // 软删除 User::destroy(1); // 真实删除 User::destroy(1,true); $user User::get(1); // 软删除 $user->delete(); // 真…...

铜陵市省重点实验室、省工程技术研究中心认定奖励补贴和申报认定条件流程归集
本文介绍铜陵市省重点实验室、省工程技术研究中心认定奖励补贴和申报认定条件等内容,详情如下,需要申报的可指导! 铜陵市省重点实验室、省工程技术研究中心认定奖励补贴(2023年发布) 对新认定的国家重点实验室、国家…...
Linux-目录和文件
目录 一、Linux目录 1、Linux常见目录 2、常见的Linux文件类型 二、cat-查看文件命令 1、cat命令用法 三、分页查看文件内容 1、 more命令 2、less命令 3、more和less的区别 四、查看文件开头或末尾 1、head命令 2、tail命令 3、wc-统计文件内容 4、grep 命令…...

2024-06月 | 维信金科 | 风控数据岗位推荐,高收入岗位来袭!
今日推荐岗位:策略分析经理/分析专家、贷前、中策略分析、风控模型分析。 风控部门是金融业务的核心部门,而从事风控行业的人即称之为风险管理者。是大脑,是最最最重要的部门之一。今日推荐岗位的核心技能分布如下: 简历发送方式…...

不适合编程的人是怎样的?
你知道不适合编程的人是怎样的吗?其实,对编程没有兴趣的人往往都不适合从事编程工作。编程并非是一项轻松简单的任务,它需要投入大量的时间和精力。 编程领域有其独特的特点和要求。首先,编程有着相当陡峭的学习曲线。从最基础的语…...

el-table表格变更前后根据数据值改变背景颜色
需求: 1.左侧变更前表格数据不可以编辑,并且背景色加灰 2.右侧变更后表格数据可被编辑,编辑后变更前与变更后行数据不一致,添加背景色区分 3.点击删除的时候,给变更后表格当前行,添加背景色和删除的中横…...

flask基础知识1
目录 1.介绍 2.体验一下 3.配置参数: 4.路由和URL 1.路由 2.动态路由: 自定义转换器: 3.使用自定义转换器 5.url_for函数 6.request参数 7.处理响应: 1.重定向: 2.返回json数据: 3.返回模板&…...

第8天:Django Admin高级配置
第8天:Django Admin高级配置 目标 定制Django Admin界面,提高数据管理效率。 任务概览 注册模型到Admin界面。定制Admin选项,如列表显示、搜索字段、过滤器等。 详细步骤 1. 注册模型到Admin界面 在Django Admin中注册模型,…...
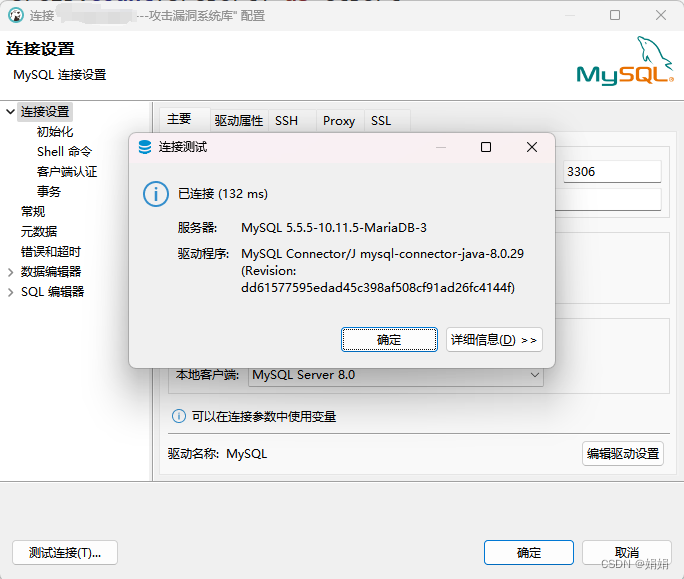
本地无法连接linux上的MariaDB数据库
问题:本地用DBeaver无法连接服务器上的MariaDB数据库 ? 测试1:在cmd中ping 服务器IP,看是否能ping通,能ping通,没有问题 测试2:在cmd中telnet 服务器IP 端口,看是否能访问…...

使用 Netty 自定义解码器处理粘包和拆包问题详解
使用 Netty 自定义解码器处理粘包和拆包问题详解 在网络编程中,粘包和拆包问题是常见的挑战。粘包是指多个数据包在传输过程中粘在一起,而拆包是指一个数据包在传输过程中被拆分成多个部分。Netty 是一个高性能、事件驱动的网络应用框架,提供…...
SDK编译IO Domain电压选择
开源鸿蒙硬件方案领跑者 触觉智能 本文适用于在Purple Pi OH开发板进行分区镜像烧录。触觉智能的Purple Pi OH鸿蒙开源主板,是华为Laval官方社区主荐的一款鸿蒙开发主板。 该主板主要针对学生党,极客,工程师,极大降低了开源鸿蒙…...
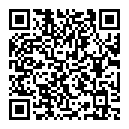
如何在纯内网环境下,将EasyCVR视频汇聚网关通过4G与第三方公网云平台级联?
EasyCVR视频汇聚网关是TSINGSEE青犀软硬一体的一款产品,可提供多协议的接入、音视频采集、处理,能实现海量前端设备的轻量化接入/转码/分发、视频直播、云端录像、云存储、检索回看、智能告警、平台级联等,兼容多种操作系统,轻松扩…...

2024-06-14 AI资讯:CCF论坛探讨大模型挑战,启动安全赛
智源社区 共话大模型技术进展与挑战,CCF大模型论坛北京会议圆满落幕! 2024 年 6 月 6 日中国计算机学会大模型论坛(CCF FoLM)主题会议在北京顺利举办。本次会议主题为“大模型技术进展与挑战”,各位专家围绕大模型技…...
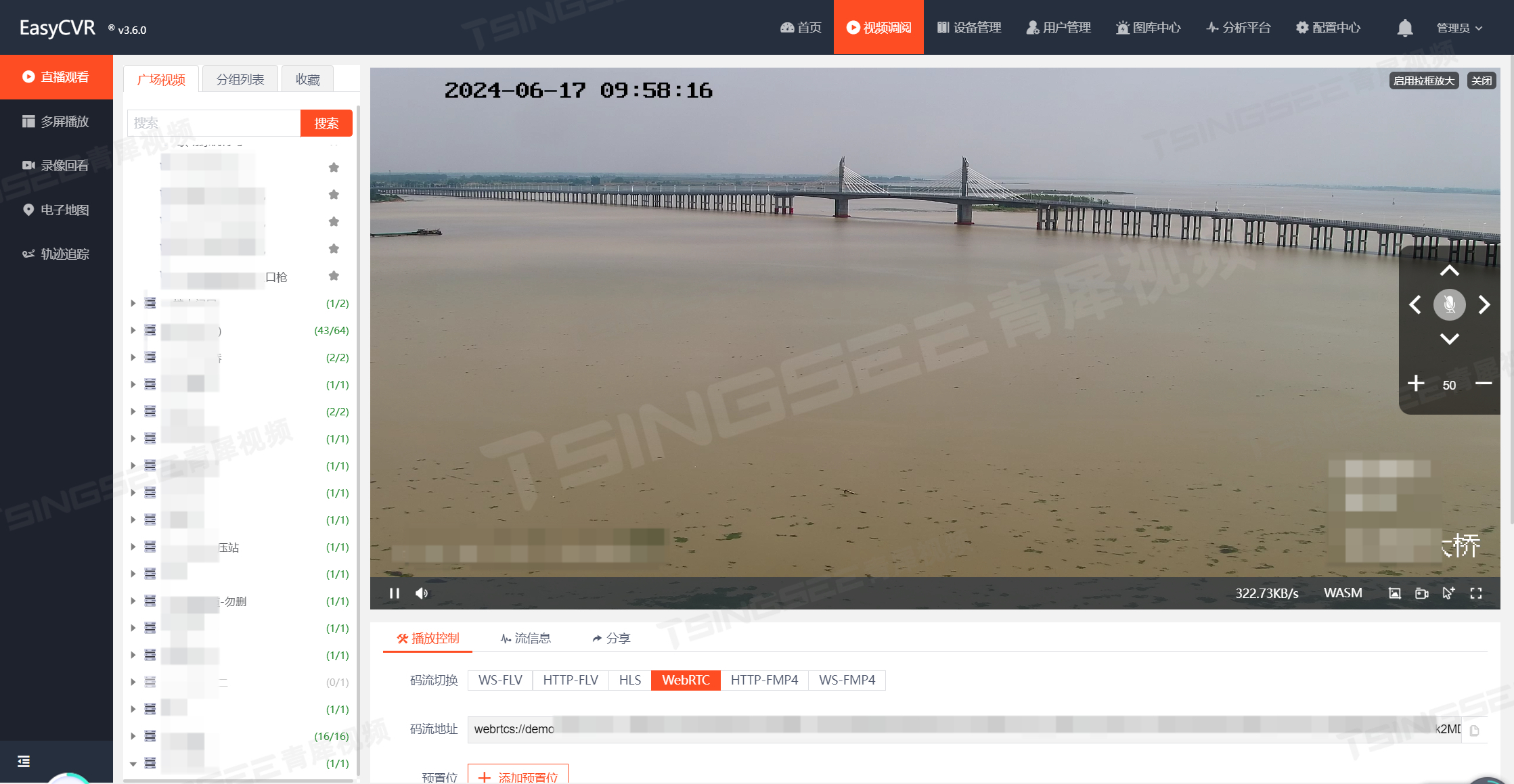
玩转Matlab-Simscape(初级)- 10 - 基于COMSOLSimulink 凸轮机构的控制仿真
** 玩转Matlab-Simscape(初级)- 10 - 基于COMSOL&Simulink 凸轮机构的控制仿真 ** 目录 玩转Matlab-Simscape(初级)- 10 - 基于COMSOL&Simulink 凸轮机构的控制仿真 前言一、简介二、在Solidworks中创建3D模型ÿ…...

spark学习总结
系列文章目录 第1天总结:spark基础学习 1- Spark基本介绍(了解)2- Spark入门案例(掌握)3- 常见面试题(掌握) 文章目录 系列文章目录前言一、Spark基本介绍1、Spark是什么1.1 定义1.2 Spark与M…...

eNSP学习——帧中继基本配置
目录 主要命令 基本原理 实验目的 实验内容 实验拓扑 实验编址 实验步骤 1、基本配置 2、静态与动态映射的配置 3、子接口配置和静态路由 主要命令 [R1]int s1/0/0 [R1-Serial1/0/0]link-protocol fr //配置链路层协议为FR Warning: The encapsulation protocol…...
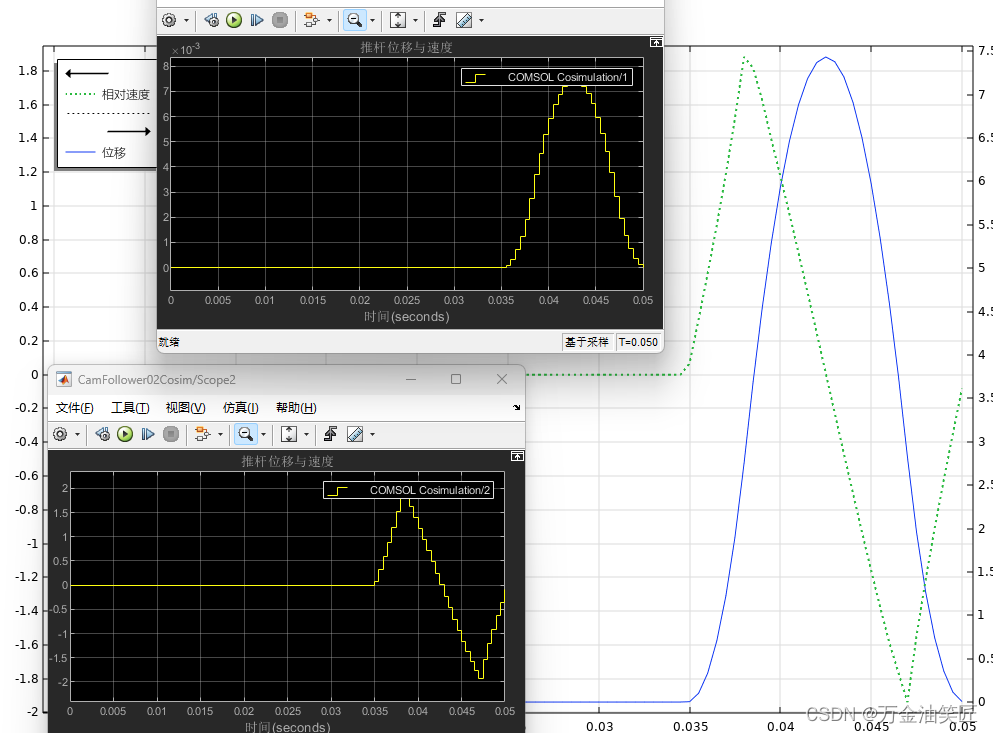
XML Encoding = ‘GBK‘ after STRANS,中文乱码
最近帮同事处理了一个中信银行银企直连接口的一个问题,同事反馈,使用STRANS转换XML后,encoding始终是’utf-16’,就算指定了GBK也不行。尝试了很多办法始终不行,发到银行的数据中,中文始终是乱码。 Debug使用HTML视图…...

Python 异步HTTP客户端实战:aiohttp深度解析
Python 异步HTTP客户端实战:aiohttp深度解析 引言 在现代Python后端开发中,异步HTTP客户端是构建高性能服务的关键组件。作为一名从Rust转向Python的后端开发者,我深刻体会到异步编程在处理大量并发请求时的优势。aiohttp作为Python生态中最流…...

机器视觉在人工智能领域的应用
机器视觉在人工智能领域的应用 目录机器视觉在人工智能领域的应用一、图像处理与机器视觉的概念阐述1. 图像处理(Image Processing)2. 机器视觉(Machine Vision / Computer Vision)二、图像处理与机器视觉的区别与共同点区别共同点…...

NPC逆变器模糊超螺旋滑模控制【附仿真】
✨ 长期致力于NPC型逆变器、滑模控制、超螺旋算法、模糊控制、电能质量优化研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)改进型超螺旋滑模变结构控…...

【51单片机一个按键切合初始流水灯按一下对半闪烁按一下显示时间】2023-10-16
缘由51单片机按键切换流水灯和时钟_嵌入式-CSDN问答 我想搞一个按键切换在初始状态流水灯按一下到双闪灯再按一下到时钟,可是之中如果用延时函数会导致CPU不能运行很多事情造成卡顿,利用中断的话定时检测的时间又不一样,我试着编译了代码但发…...

OBS Source Record插件深度解析:5个实战技巧实现多源独立录制
OBS Source Record插件深度解析:5个实战技巧实现多源独立录制 【免费下载链接】obs-source-record 项目地址: https://gitcode.com/gh_mirrors/ob/obs-source-record 你是否曾经在直播或视频制作中,想要单独录制某个摄像头画面、游戏窗口或浏览器…...

别再为答辩 PPT 秃头了!PaperXie 的 AI PPT 功能,让你把时间花在更重要的地方
paperxie-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPThttps://www.paperxie.cn/ppt/createhttps://www.paperxie.cn/ppt/create 距离毕业论文答辩只剩半个月,你的 PPT 还停留在 “空白文档” 阶段吗? 我见过太多同学在这个阶段陷…...

从数学定义到代码实现:深度解析卷积与互相关的本质差异
1. 卷积与互相关的数学定义 很多人第一次接触卷积和互相关时,都会觉得它们长得太像了。确实,从表面上看,它们都是用一个滑动窗口在输入数据上移动,然后进行加权求和。但如果你仔细研究它们的数学定义,就会发现本质上的…...

基于OpenAI API与社交平台集成的智能聊天机器人构建指南
1. 项目概述:一个整合社交与AI的自动化工具箱最近在GitHub上看到一个挺有意思的项目,叫“Whatsapp_Instagram_Messanger_ChatGPT_OpenAI”。光看这个标题,你大概就能猜到它的野心不小——它试图把WhatsApp、Instagram、Messenger这几个主流社…...

我让 AI 学会了“拆“App——Antigravity 逆向分析能力搭建手记
你能想象吗?对着 AI 说一句"帮我分析这个 APK",它就自己打开 IDA、拆解代码、Hook 运行时、提取密钥、还原源码……全程不用你碰一下鼠标。先说结论我给 AI 编程助手 Antigravity 装上了 4 把"瑞士军刀",让它从一个只会写…...

ComfyUI-WanVideoWrapper:AI视频生成的全新创作革命
ComfyUI-WanVideoWrapper:AI视频生成的全新创作革命 【免费下载链接】ComfyUI-WanVideoWrapper 项目地址: https://gitcode.com/GitHub_Trending/co/ComfyUI-WanVideoWrapper 在AI技术飞速发展的今天,ComfyUI-WanVideoWrapper作为一款强大的AI视…...