c++qt合并两张灰度图像
需求:将两张尺寸相同的灰度图像进行合并,合并后的图像,每个像素点灰度值为两张原图对应像素点灰度值之和。若超过255,则最大为255。
方法一:
将图像读取为cv::Mat,再调用opencv的cv::add方法,进行合并。
方法二:
不调用opencv的方法。假设两个图像数数据都为void 指针,先将其都转为unsigned char 指针,再按下标进行相加,并处理溢出情况。用一个新的unsigned char指针接收,最后再转回void指针。
配置opencv方法可参考以下文章:
https://blog.csdn.net/bangtanhui/article/details/135583311
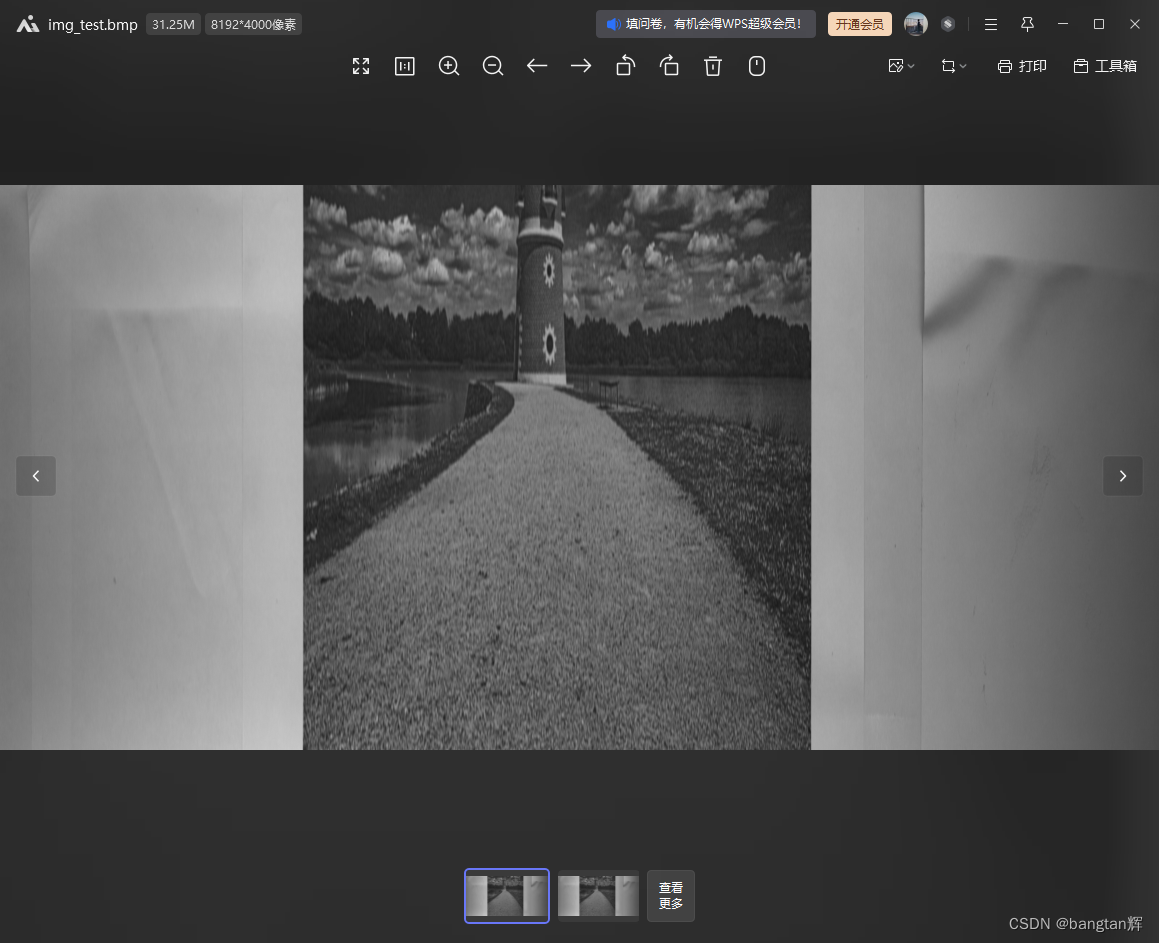
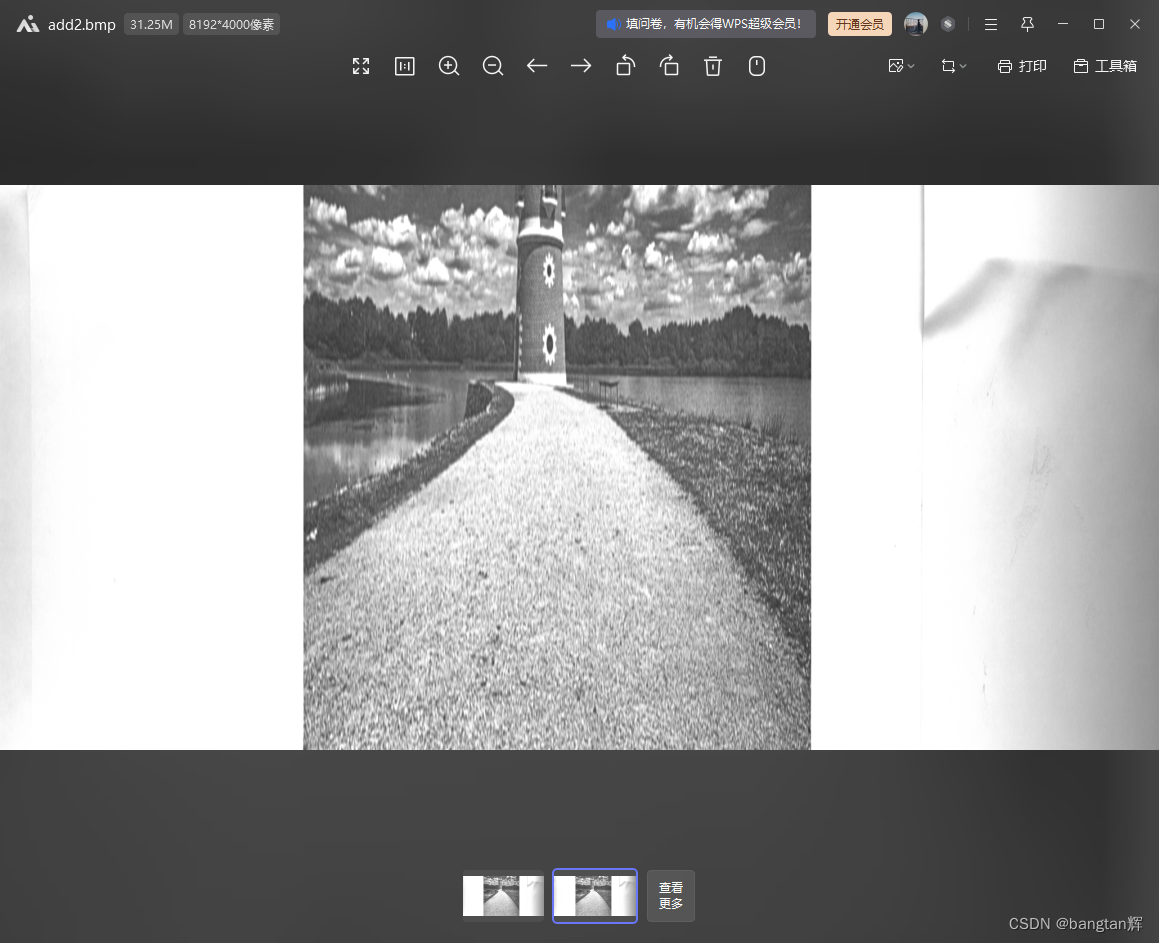
效果如下:
两张一样的原图,合并后得到一张整体灰度值更高(更亮)的图。
参考代码如下:
#include "mainwindow.h"
#include "ui_mainwindow.h"#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"//该函数用于将cv::Mat转为QImage
QImage cvMat2QImage(const cv::Mat& mat)
{// 8-bits unsigned, NO. OF CHANNELS = 1if(mat.type() == CV_8UC1) {QImage image(mat.cols, mat.rows, QImage::Format_Indexed8);// Set the color table (used to translate colour indexes to qRgb values)image.setColorCount(256);for(int i = 0; i < 256; i++) {image.setColor(i, qRgb(i, i, i));}// Copy input Matuchar *pSrc = mat.data;for(int row = 0; row < mat.rows; row ++) {uchar *pDest = image.scanLine(row);memcpy(pDest, pSrc, static_cast<size_t>(mat.cols));pSrc += mat.step;}return image;} else if(mat.type() == CV_8UC3) { // 8-bits unsigned, NO. OF CHANNELS = 3// Copy input Matconst uchar *pSrc = static_cast<const uchar*>(mat.data);// Create QImage with same dimensions as input MatQImage image(pSrc, mat.cols, mat.rows, static_cast<int>(mat.step), QImage::Format_RGB888);return image.rgbSwapped();} else if(mat.type() == CV_8UC4) {// Copy input Matconst uchar *pSrc = static_cast<const uchar*>(mat.data);// Create QImage with same dimensions as input MatQImage image(pSrc, mat.cols, mat.rows, static_cast<int>(mat.step), QImage::Format_ARGB32);return image.copy();} else {return QImage();}
}MainWindow::MainWindow(QWidget *parent) :QMainWindow(parent),ui(new Ui::MainWindow)
{ui->setupUi(this);QString imgPath1 = "E:\\QtDemo\\ImageMerge_Demo\\img_test.bmp";QString imgPath2 = "E:\\QtDemo\\ImageMerge_Demo\\img_test_append.bmp";cv::Mat imgMat1 = cv::imread(imgPath1.toStdString(), CV_8UC1);cv::Mat imgMat2 = cv::imread(imgPath2.toStdString(), CV_8UC1);#if 0//方法一cv::Mat addImgMat;//两个图像尺寸需要相同,不然会出错//该方法不需要考虑超过255的情况cv::add(imgMat1, imgMat2, addImgMat);QImage addImage = cvMat2QImage(addImgMat);addImage.save("add.bmp");#else//方法二void* dataPtr1 = static_cast<void*>(imgMat1.data);void* dataPtr2 = static_cast<void*>(imgMat2.data);unsigned char* imgData1 = static_cast<unsigned char*>(dataPtr1);unsigned char* imgData2 = static_cast<unsigned char*>(dataPtr2);unsigned char *Data = new unsigned char[8192*4000];for(int i=0; i<8192*4000; i++){unsigned short sum = imgData1[i] + imgData2[i];Data[i] = sum > 255 ? 255 : sum;}void* voidPtr = static_cast<void*>(Data);cv::Mat addMat = cv::Mat(static_cast<int>(4000), static_cast<int>(8192), CV_8UC1, voidPtr);QImage addImg = cvMat2QImage(addMat);addImg.save("add2.bmp");#endif}MainWindow::~MainWindow()
{delete ui;
}相关文章:
c++qt合并两张灰度图像
需求:将两张尺寸相同的灰度图像进行合并,合并后的图像,每个像素点灰度值为两张原图对应像素点灰度值之和。若超过255,则最大为255。 方法一: 将图像读取为cv::Mat,再调用opencv的cv::add方法,进…...

Uniapp通过年月日时间转变星期格式
效果图 参靠微信小程序:日常记一记 代码 <view v-for"(d,index) in dataList" >{{getWeekDay(d.ctime)}} //时间格式:2024-06-21</view> js export default {data(){return {dataList:[],//时间数组}},onLoad() {this.loadList…...

如何编写和执行高效的测试计划
如何编写和执行高效的测试计划 1. 测试计划概述2. 测试阶段详解3. 测试计划模板4. 关键注意事项总结 1. 测试计划概述 测试计划是指导整个测试过程的重要文档,其中包含了测试策略、资源分配、进度安排以及风险评估等内容。 一个完善的测试计划应当包括以下几个主要…...

【MySQL连接器(Python)指南】03-MySQL连接器(Python)安装
文章目录 前言1. 从二进制发行版中安装连接器1.1 使用pip安装MySQL连接器1.2 使用MySQL Yum Repository安装1.3 使用Debian软件包安装连接器2. 从源代码发行版安装连接器2.1 在Windows上源码安装2.2 在类Unix系统上源码安装3. 验证连接器安装总结前言 MySQL连接器(Python),用于…...

Spring Boot组件化与参数校验
Spring Boot组件化与参数校验 Spring Boot版本选择 2.3.x版本 2.6.x版本 Spring Boot核心思想 约定大于配置,简化繁琐的配置 Spring Boot自动配置原理 SpringBootApplication: Spring Boot应用标注在某个类上说明这个类是SpringBoot的主配置类,Spr…...

实现可扩展的电商返利平台:技术选型与挑战
实现可扩展的电商返利平台:技术选型与挑战 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿! 在当今数字化和电商兴盛的时代,返利平台成为…...
从0开始C++(三):构造函数与析构函数详解
目录 构造函数 构造函数的基本使用 构造函数也支持函数重载 构造函数也支持函数参数默认值 构造初始化列表 拷贝构造函数 浅拷贝和深拷贝 析构函数 总结 练习一下ヽ( ̄▽ ̄)ノ 构造函数 构造函数的基本使用 构造函数是一种特殊的成…...

行车记录仪文件夹“0字节”现象解析与恢复策略
一、行车记录仪文件夹“0字节”现象描述 行车记录仪作为现代驾驶中的必备设备,其储存的视频数据对于事故记录和取证至关重要。然而,有时车主们可能会遇到这样一个问题:行车记录仪的某个文件夹内的文件突然变成了0字节大小,无法正…...

呼叫中心系统的功能都有哪些?okcc呼叫中心pscc磐石云呼叫系统部署
当前电话营销普及到各行各业,方便快捷成了大部分企业在宣传自己公司的产品时必用的一种营销方式,但是电话营销在管理上也存在许多问题。例如:销售员与客户沟通前,未能详细了解客户的资料;多名销售员重复拨打同一个客户…...

2024.06.08校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、提前批 | 中电锦江2025届提前批招聘 提前批 | 中电锦江2025届提前批招聘 2、实习 | 国电电力2025届暑期实习生计划启动! 实习 | 国电电力2025届暑期实习生计划启动&#x…...

Polyplus——转染试剂专业供应商
PolyPlus-transfection是一家专业的转染试剂研发和生产的生物技术公司,拥有20年的的转染试剂研发经验,通过创新的核酸转染解决方案支持基因和细胞治疗、生物制剂制造和生命科学研究。目前已经通过了ISO 9001: 2000质量体系认证,已经开发了一系…...
微服务架构-线上治理、线下治理与架构演进
目录 一、线上治理 1.1 概述 1.2 线上预案体系 1.2.1 概述 1.2.2 变更引起的故障 1.2.3 流量和容量变化引起的故障 1.2.4 依赖故障 1.2.5 机房、网络等硬件和环境故障 1.2.6 其他 1.2.7 故障的场景化 1.3 基于Metric的预案自动触发 1.4 治理参数动态调整 1.4.1 举例…...

网络安全:什么是SQL注入
文章目录 网络安全:什么是SQL注入引言SQL注入简介工作原理示例代码 攻击类型为什么SQL注入危险结语 网络安全:什么是SQL注入 引言 在数字化时代,数据安全成为了企业和个人最关心的问题之一。SQL注入(SQL Injection)是…...

从零开始精通Onvif之网络配置
💡 如果想阅读最新的文章,或者有技术问题需要交流和沟通,可搜索并关注微信公众号“希望睿智”。 概述 网络配置是Onvif规范中的重要组成部分,允许用户通过网络远程配置和管理设备的网络设置,比如:DHCP、IP地…...

在 macOS 上使用 Homebrew 安装和配置 Python 及 Tk 库
在 macOS 上,系统自带的 /usr/bin/python3 版本较旧,且直接升级系统自带的 Python 版本可能会影响系统稳定性。因此,推荐使用 Homebrew 来安装和管理 Python 及其相关库。本文将详细介绍如何通过 Homebrew 安装和配置 Python 3 及 Tk 库&…...

【机器学习 复习】第2章 线性回归及最大熵模型
一、概念 1.回归就是用一条曲线对数据点进行拟合,该曲线称为最佳拟合曲线,这个拟合过程称为回归。 2.一个自变量 叫 一元线性回归,大于一个自变量 叫 多元线性回归。 (1)多元回归:两个x,一个…...

关于椭圆的方程(有Python画的动图)
关于椭圆的方程(有Python画的动图) flyfish 几何定义 椭圆是平面上所有到两个固定点(焦点)的距离之和为常数的点的集合。这两个固定点叫做焦点。 解析几何描述 设椭圆的两个焦点为 F 1 F_1 F1 和 F 2 F_2 F2ÿ…...

selenium常见难点解决方案
勾选框勾选问题 勾选框代码逻辑实现过程: 第一步:首先找到勾选框的元素; 第二步:检查它是否已经被勾选。如果已经勾选,则进行取消勾选操作;如果未勾选,则进行点击勾选操作; 以下是一…...

【Python高级编程】 综合练习-使用OpenCV 进行视频数据处理
综合练习 读取一个视频文件,对其进行处理后保存为一个新的视频文件。具体的处理步骤包括调整帧大小、转换为灰度图像、垂直翻转画面以及添加高斯噪声。 下面是代码的详细实现: import cv2 import numpy as np# 定义一个函数,用来给图像添加…...

rs232和can的区别
在电机通讯和升级固件时我们经常用到RS232和CAN两种通讯模式,那这两种有何不同吗? RS232和CAN的主要区别在于通信方式、应用场景、传输距离、通信速度以及网络结构。 通信方式: RS232是一种串行通信接口标准,支持全双工通信&…...

004 LVGL应用场景与案例概览
004 LVGL应用场景与案例概览 上周帮一个做智能家居的朋友调屏,他用的STM32F407+4.3寸RGB屏,LVGL跑得挺欢,但一加上WiFi联网和MQTT协议栈,屏幕刷新就开始卡顿,触摸响应延迟明显。我打开他的代码一看,好家伙,lv_task_handler()直接放在主循环里裸奔,没有任何优先级管理。…...
)
别再死记硬背关键帧了!用Blender 2.83.9的Rigify,带你拆解走路动画的物理原理(附膝跳问题修复)
别再死记硬背关键帧了!用Blender 2.83.9的Rigify,带你拆解走路动画的物理原理(附膝跳问题修复) 当你第一次尝试用Blender制作走路动画时,是否遇到过这样的困境:明明按照教程一步步设置了关键帧,…...

智能开关总是断连?7 个行之有效的解决方法
三星智能切换(Samsung Smart Switch)是一款官方且易于使用的工具,专为三星用户设计,用于在移动设备之间或手机与电脑之间传输照片、联系人、应用程序、短信和其他数据。它支持无线 Wi-Fi 连接和有线 USB 连接,为数据迁…...

正点原子阿尔法开发板uboot编译避坑指南:从源码到SD卡启动的完整流程
正点原子阿尔法开发板uboot编译全流程实战:从环境搭建到SD卡启动的深度解析 第一次接触正点原子阿尔法开发板时,最令人头疼的莫过于uboot的编译和烧录过程。那些看似简单的命令背后,隐藏着无数新手容易踩中的"暗坑"——从文件格式的…...

Verilog分频器进阶:从6分频到1.5分频的实战设计与波形分析
1. 分频器基础与设计思路 在数字电路设计中,时钟信号就像人的心跳一样重要。分频器的作用,就是把这个"心跳"调整到我们需要的节奏。简单来说,分频器就是把输入时钟的频率降低N倍,得到一个新的时钟信号。比如6分频&#…...

163MusicLyrics:免费音乐歌词提取终极指南,轻松获取网易云与QQ音乐歌词
163MusicLyrics:免费音乐歌词提取终极指南,轻松获取网易云与QQ音乐歌词 【免费下载链接】163MusicLyrics 云音乐歌词获取处理工具【网易云、QQ音乐】 项目地址: https://gitcode.com/GitHub_Trending/16/163MusicLyrics 还在为找不到准确的音乐歌…...

不想注册Nvidia账户?手把手教你修改app.js文件,让GeForce Experience直接进主界面
免登录畅享GeForce Experience:技术流修改指南 每次打开GeForce Experience都要面对那个恼人的登录窗口?作为资深PC玩家,我完全理解这种困扰。重装系统后最烦人的就是各种强制登录,尤其是当我们只想快速使用屏幕录制或游戏优化功能…...

别再死磕动态规划了!用Python模拟退火算法搞定背包问题,附完整代码
用Python模拟退火算法优雅解决背包问题:从理论到实战 在算法学习的过程中,背包问题就像一座难以逾越的高山,让无数初学者望而生畏。传统的动态规划解法虽然精确,但代码实现复杂、状态转移方程难以理解,对于实际应用场景…...
)
告别XML解析焦虑:用TinyXML2在C++项目中轻松读写配置文件(附完整代码)
告别XML解析焦虑:用TinyXML2在C项目中轻松读写配置文件(附完整代码) 在C开发中,配置文件管理是每个项目都无法绕开的环节。当我们需要保存用户偏好、游戏设置或系统参数时,选择一种合适的配置格式往往成为第一个技术决…...

HBase集群部署避坑指南:从NoNode for /hbase/master错误到稳定启动
1. 遇到NoNode错误时别慌,先看懂它在说什么 第一次看到"HBase报错ERROR: KeeperErrorCode NoNode for /hbase/master"这个错误时,我正端着咖啡准备庆祝集群启动成功。结果这行红字直接给我泼了盆冷水——相信很多新手朋友都有类似的经历。这个…...