Linux 阻塞和非阻塞 IO 实验学习
Linux 阻塞和非阻塞 IO 实验学习
IO 指的是 Input/Output,也就是输入/输出,是应用程序对驱动设备的输入/输出操作。当应用程序对设备驱动进行操作的时候,如果不能获取到设备资源,那么阻塞式 IO 就会将应用程序对应的线程挂起,直到设备资源可以获取为止。对于非阻塞 IO,应用程序对应的线程不会挂起,它要么一直轮询等待,直到设备资源可以使用,要么就直接放弃。阻塞式 IO 如图 52.1.1.1所示:
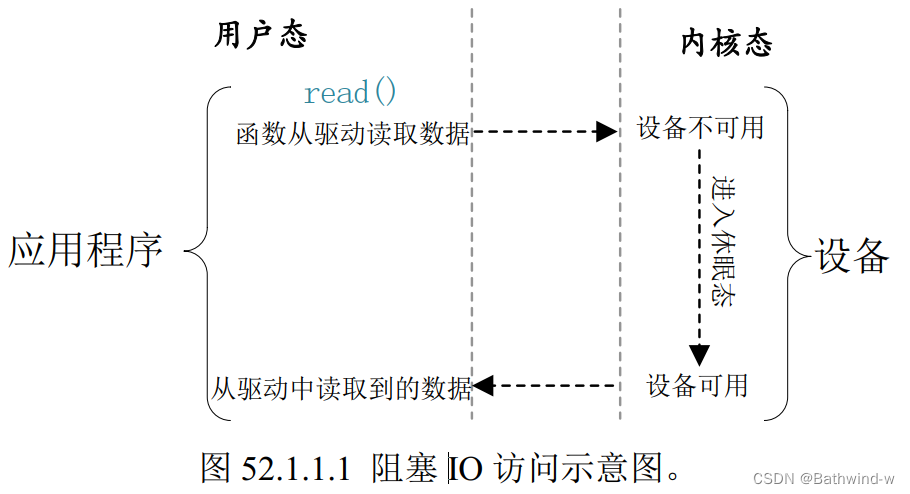
应用程序调用 read 函数从设备中读取数据,当设备不可用或数据未准备好的时候就会进入到休眠态。等设备可用的时候就会从休眠态唤醒,然后从设备中读取数据返回给应用程序。
非阻塞 IO 如图 52.1.2 所示:
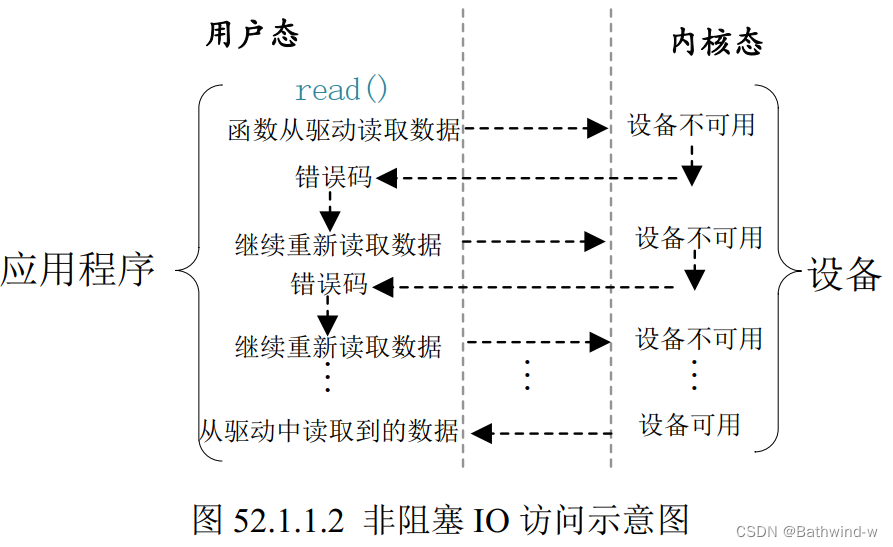
应用程序使用非阻塞访问方式从设备读取数据,当设备不可用或数据未准备好的时候会立即向内核返回一个错误码,表示数据读取失败。应用程序会再次重新读取数据,这样一直往复循环,直到数据读取成功。
示例代码 52.1.1.1 应用程序阻塞读取数据
1 int fd;
2 int data = 0;
3 4
fd = open("/dev/xxx_dev", O_RDWR); /* 阻塞方式打开 */
5 ret = read(fd, &data, sizeof(data)); /* 读取数据 */
如果应用程序要采用非阻塞的方式来访问驱动设备文件,可以使用如下所示代码:
示例代码 52.1.1.2 应用程序非阻塞读取数据
1 int fd;
2 int data = 0;
3 4
fd = open("/dev/xxx_dev", O_RDWR | O_NONBLOCK); /* 非阻塞方式打开 */
5 ret = read(fd, &data, sizeof(data)); /* 读取数据 */
第 4 行使用 open 函数打开“/dev/xxx_dev”设备文件的时候添加了参数“O_NONBLOCK”,
表示以非阻塞方式打开设备,这样从设备中读取数据的时候就是非阻塞方式的了。
等待队列
1、等待队列头
阻塞访问最大的好处就是当设备文件不可操作的时候进程可以进入休眠态,这样可以将CPU 资源让出来。但是,当设备文件可以操作的时候就必须唤醒进程,一般在中断函数里面完成唤醒工作。 Linux 内核提供了等待队列(wait queue)来实现阻塞进程的唤醒工作,如果我们要在驱动中使用等待队列,必须创建并初始化一个等待队列头,等待队列头使用结构体wait_queue_head_t 表示, wait_queue_head_t 结构体定义在文件 include/linux/wait.h 中,结构体内容如下所示:
示例代码 52.1.2.1 wait_queue_head_t 结构体
39 struct __wait_queue_head {
40 spinlock_t lock;
41 struct list_head task_list;
42 };
43 typedef struct __wait_queue_head wait_queue_head_t;
定义好等待队列头以后需要初始化, 使用 init_waitqueue_head 函数初始化等待队列头,函数原型如下:
void init_waitqueue_head(wait_queue_head_t *q)
参数 q 就是要初始化的等待队列头。也可以使用宏 DECLARE_WAIT_QUEUE_HEAD 来一次性完成等待队列头的定义的初始化。
2、等待队列项
等待队列头就是一个等待队列的头部,每个访问设备的进程都是一个队列项,当设备不可用的时候就要将这些进程对应的等待队列项添加到等待队列里面。结构体 wait_queue_t 表示等待队列项,结构体内容如下:
示例代码 52.1.2.2 wait_queue_t 结构体
struct __wait_queue {unsigned int flags;void *private;wait_queue_func_t func;struct list_head task_list;
};
typedef struct __wait_queue wait_queue_t;
使用宏 DECLARE_WAITQUEUE 定义并初始化一个等待队列项,宏的内容如下:DECLARE_WAITQUEUE(name, tsk),name 就是等待队列项的名字, tsk 表示这个等待队列项属于哪个任务(进程),一般设置为current , 在 Linux 内 核 中 current 相 当 于 一 个 全 局 变 量 , 表 示 当 前 进 程 。 因 此 宏DECLARE_WAITQUEUE 就是给当前正在运行的进程创建并初始化了一个等待队列项。
3、将队列项添加/移除等待队列头
当设备不可访问的时候就需要将进程对应的等待队列项添加到前面创建的等待队列头中,只有添加到等待队列头中以后进程才能进入休眠态。当设备可以访问以后再将进程对应的等待队列项从等待队列头中移除即可,
等待队列项添加 API 函数如下:
void add_wait_queue(wait_queue_head_t *q,wait_queue_t *wait)
函数参数和返回值含义如下:
q: 等待队列项要加入的等待队列头。
wait:要加入的等待队列项。
返回值:无。
等待队列项移除 API 函数如下:
void remove_wait_queue(wait_queue_head_t *q,wait_queue_t *wait)
函数参数和返回值含义如下:
q: 要删除的等待队列项所处的等待队列头。
wait:要删除的等待队列项。
返回值:无。
4、等待唤醒
当设备可以使用的时候就要唤醒进入休眠态的进程,唤醒可以使用如下两个函数:
void wake_up(wait_queue_head_t *q)
void wake_up_interruptible(wait_queue_head_t *q)
参数 q 就是要唤醒的等待队列头,这两个函数会将这个等待队列头中的所有进程都唤醒。wake_up 函数可以唤醒处于 TASK_INTERRUPTIBLE 和 TASK_UNINTERRUPTIBLE 状态的进程,而 wake_up_interruptible 函数只能唤醒处于 TASK_INTERRUPTIBLE 状态的进程。
5、等待事件
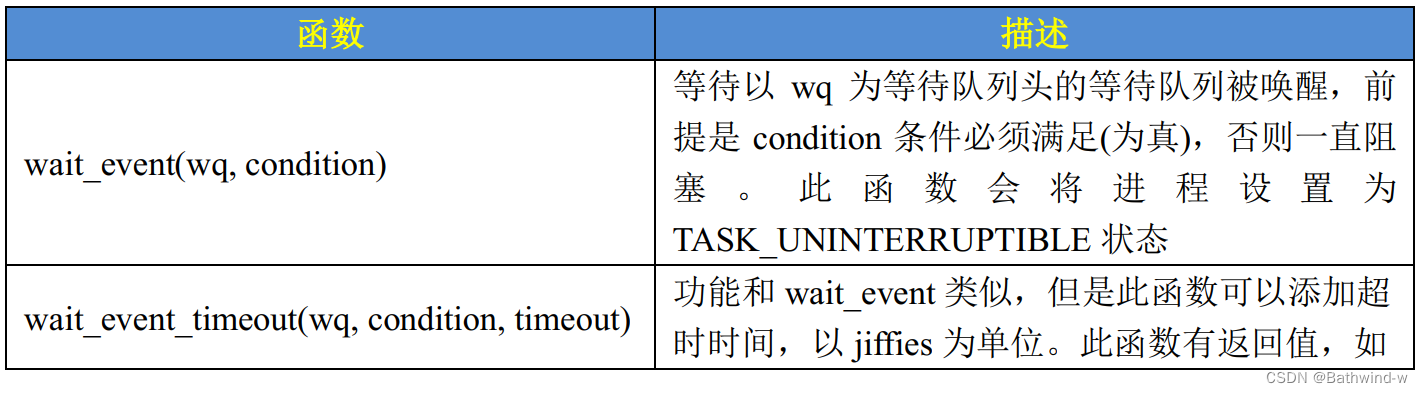
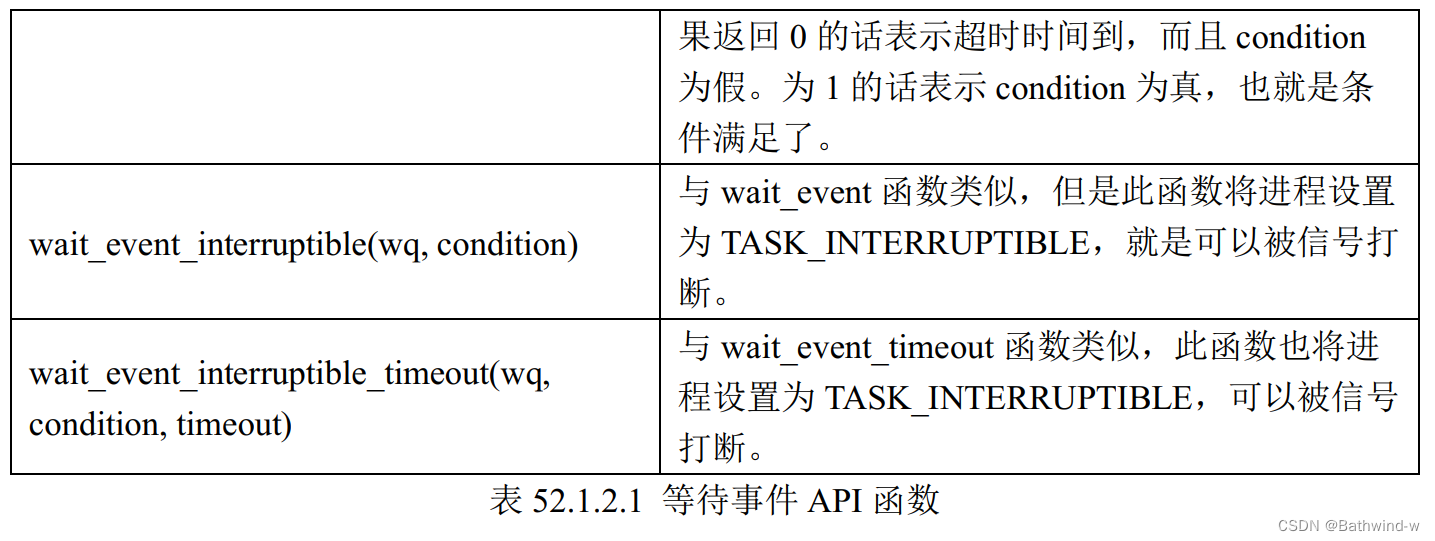
除了主动唤醒以外,也可以设置等待队列等待某个事件,当这个事件满足以后就自动唤醒等待队列中的进程,和等待事件有关的 API 函数如表 52.1.2.1 所示:
轮询
如果用户应用程序以非阻塞的方式访问设备,设备驱动程序就要提供非阻塞的处理方式,也就是轮询。 poll、 epoll 和 select 可以用于处理轮询,应用程序通过 select、 epoll 或 poll 函数来查询设备是否可以操作,如果可以操作的话就从设备读取或者向设备写入数据。当应用程序调用 select、 epoll 或 poll 函数的时候设备驱动程序中的 poll 函数就会执行,因此需要在设备驱动程序中编写 poll 函数。我们先来看一下应用程序中使用的 select、 poll 和 epoll 这三个函数。
1、 select 函数
select 函数原型如下:
int select(int nfds,fd_set *readfds,fd_set *writefds,fd_set *exceptfds,struct timeval *timeout)
nfds: 所要监视的这三类文件描述集合中, 最大文件描述符加 1。
readfds、 writefds 和 exceptfds:这三个指针指向描述符集合,这三个参数指明了关心哪些描述符、需要满足哪些条件等等,这三个参数都是 fd_set 类型的, fd_set 类型变量的每一个位都代表了一个文件描述符。readfds 用于监视指定描述符集的读变化,也就是监视这些文件是否可以读取,只要这些集合里面有一个文件可以读取那么 seclect 就会返回一个大于 0 的值表示文件可以读取。如果没有文件可以读取,那么就会根据 timeout 参数来判断是否超时。可以将 readfs设置为 NULL,表示不关心任何文件的读变化。 writefds 和 readfs 类似,只是 writefs 用于监视这些文件是否可以进行写操作。 exceptfds 用于监视这些文件的异常。
我们现在要从一个设备文件中读取数据,那么就可以定义一个 fd_set 变量,这个变量要传递给参数 readfds。当我们定义好一个 fd_set 变量以后可以使用如下所示几个宏进行操作:
void FD_ZERO(fd_set *set)
void FD_SET(int fd, fd_set *set)
void FD_CLR(int fd, fd_set *set)
int FD_ISSET(int fd, fd_set *set)
FD_ZERO 用于将 fd_set 变量的所有位都清零, FD_SET 用于将 fd_set 变量的某个位置 1,也就是向 fd_set 添加一个文件描述符,参数 fd 就是要加入的文件描述符。 FD_CLR 用于将 fd_set变量的某个位清零,也就是将一个文件描述符从 fd_set 中删除,参数 fd 就是要删除的文件描述符。 FD_ISSET 用于测试一个文件是否属于某个集合,参数 fd 就是要判断的文件描述符。
timeout:超时时间,当我们调用 select 函数等待某些文件描述符可以设置超时时间,超时时间使用结构体 timeval 表示,结构体定义如下所示:
struct timeval {
long tv_sec; /* 秒 */
long tv_usec; /* 微妙 */
};
当 timeout 为 NULL 的时候就表示无限期的等待。
返回值: 0,表示的话就表示超时发生,但是没有任何文件描述符可以进行操作; -1,发生
错误;其他值,可以进行操作的文件描述符个数。
使用 select 函数对某个设备驱动文件进行读非阻塞访问的操作示例如下所示:
示例代码 52.1.3.1 select 函数非阻塞读访问示例
1 void main(void)
2 {
3 int ret, fd; /* 要监视的文件描述符 */
4 fd_set readfds; /* 读操作文件描述符集 */
5 struct timeval timeout; /* 超时结构体 */
6 7
fd = open("dev_xxx", O_RDWR | O_NONBLOCK); /* 非阻塞式访问 */
8 9
FD_ZERO(&readfds); /* 清除 readfds */
10 FD_SET(fd, &readfds); /* 将 fd 添加到 readfds 里面 */
11
12 /* 构造超时时间 */
13 timeout.tv_sec = 0;
14 timeout.tv_usec = 500000; /* 500ms */
15
16 ret = select(fd + 1, &readfds, NULL, NULL, &timeout);
17 switch (ret) {
18 case 0: /* 超时 */
19 printf("timeout!\r\n");
20 break;
21 case -1: /* 错误 */
22 printf("error!\r\n");
23 break;
24 default: /* 可以读取数据 */
25 if(FD_ISSET(fd, &readfds)) { /* 判断是否为 fd 文件描述符 */
26 /* 使用 read 函数读取数据 */
27 }
28 break;
29 }
30 }
2、 poll 函数
在单个线程中, select 函数能够监视的文件描述符数量有最大的限制,一般为 1024,可以修改内核将监视的文件描述符数量改大,但是这样会降低效率!这个时候就可以使用 poll 函数,poll 函数本质上和 select 没有太大的差别,但是 poll 函数没有最大文件描述符限制, Linux 应用程序中 poll 函数原型如下所示:
int poll(struct pollfd *fds,nfds_t nfds,int timeout)
函数参数和返回值含义如下:
fds: 要监视的文件描述符集合以及要监视的事件,为一个数组,数组元素都是结构体 pollfd
类型的, pollfd 结构体如下所示:
struct pollfd {
int fd; /* 文件描述符 */
short events; /* 请求的事件 */
short revents; /* 返回的事件 */
};
fd 是要监视的文件描述符,如果 fd 无效的话那么 events 监视事件也就无效,并且 revents返回 0。 events 是要监视的事件,可监视的事件类型如下所示:
POLLIN 有数据可以读取
POLLPRI 有紧急的数据需要读取。
POLLOUT 可以写数据。
POLLERR 指定的文件描述符发生错误。
POLLHUP 指定的文件描述符挂起。
POLLNVAL 无效的请求。
POLLRDNORM 等同于 POLLIN
revents 是返回参数,也就是返回的事件, 由 Linux 内核设置具体的返回事件。
nfds: poll 函数要监视的文件描述符数量。
timeout: 超时时间,单位为 ms。
返回值:返回 revents 域中不为 0 的 pollfd 结构体个数,也就是发生事件或错误的文件描述
符数量; 0,超时; -1,发生错误,并且设置 errno 为错误类型。
使用 poll 函数对某个设备驱动文件进行读非阻塞访问的操作示例如下所示:
示例代码 52.1.3.2 poll 函数读非阻塞访问示例
1 void main(void)
2 {
3 int ret;
4 int fd; /* 要监视的文件描述符 */
5 struct pollfd fds;
6 7
fd = open(filename, O_RDWR | O_NONBLOCK); /* 非阻塞式访问 */
8 9
/* 构造结构体 */
10 fds.fd = fd;
11 fds.events = POLLIN; /* 监视数据是否可以读取 */
12
13 ret = poll(&fds, 1, 500); /* 轮询文件是否可操作,超时 500ms */
14 if (ret) { /* 数据有效 */
15 ......
16 /* 读取数据 */
17 ......
18 } else if (ret == 0) { /* 超时 */
19 ......
20 } else if (ret < 0) { /* 错误 */
21 ......
22 }
23 }
3、 epoll 函数
传统的 selcet 和 poll 函数都会随着所监听的 fd 数量的增加,出现效率低下的问题,而且poll 函数每次必须遍历所有的描述符来检查就绪的描述符,这个过程很浪费时间。为此, epoll应运而生, epoll 就是为处理大并发而准备的,一般常常在网络编程中使用 epoll 函数。应用程序需要先使用 epoll_create 函数创建一个 epoll 句柄, epoll_create 函数原型如下:
int epoll_create(int size)
函数参数和返回值含义如下:
size: 从 Linux2.6.8 开始此参数已经没有意义了,随便填写一个大于 0 的值就可以。
返回值: epoll 句柄,如果为-1 的话表示创建失败。
epoll 句柄创建成功以后使用 epoll_ctl 函数向其中添加要监视的文件描述符以及监视的事件, epoll_ctl 函数原型如下所示:
int epoll_ctl(int epfd,int op,int fd,struct epoll_event *event)
函数参数和返回值含义如下:
epfd: 要操作的 epoll 句柄,也就是使用 epoll_create 函数创建的 epoll 句柄。
op: 表示要对 epfd(epoll 句柄)进行的操作,可以设置为:
EPOLL_CTL_ADD 向 epfd 添加文件参数 fd 表示的描述符。
EPOLL_CTL_MOD 修改参数 fd 的 event 事件。
EPOLL_CTL_DEL 从 epfd 中删除 fd 描述符。
fd:要监视的文件描述符。
event: 要监视的事件类型,为 epoll_event 结构体类型指针, epoll_event 结构体类型如下所
示:
struct epoll_event {uint32_t events; /* epoll 事件 */epoll_data_t data; /* 用户数据 */
};
结构体 epoll_event 的 events 成员变量表示要监视的事件,可选的事件如下所示:
EPOLLIN 有数据可以读取。
EPOLLOUT 可以写数据。
EPOLLPRI 有紧急的数据需要读取。
EPOLLERR 指定的文件描述符发生错误。
EPOLLHUP 指定的文件描述符挂起。
EPOLLET 设置 epoll 为边沿触发,默认触发模式为水平触发。
EPOLLONESHOT 一次性的监视,当监视完成以后还需要再次监视某个 fd,那么就需要将
fd 重新添加到 epoll 里面。
上面这些事件可以进行“或”操作,也就是说可以设置监视多个事件。返回值: 0,成功; -1,失败,并且设置 errno 的值为相应的错误码。
一切都设置好以后应用程序就可以通过 epoll_wait 函数来等待事件的发生,类似 select 函数。 epoll_wait 函数原型如下所示:
int epoll_wait(int epfd,struct epoll_event *events,int maxevents,int timeout)
函数参数和返回值含义如下:
epfd: 要等待的 epoll。
events: 指向 epoll_event 结构体的数组,当有事件发生的时候 Linux 内核会填写 events,调
用者可以根据 events 判断发生了哪些事件。
maxevents: events 数组大小,必须大于 0。
timeout: 超时时间,单位为 ms。
返回值: 0,超时; -1,错误;其他值,准备就绪的文件描述符数量。
epoll 更多的是用在大规模的并发服务器上,因为在这种场合下 select 和 poll 并不适合。当设计到的文件描述符(fd)比较少的时候就适合用 selcet 和 poll,本章我们就使用 sellect 和 poll 这两个函数。
Linux 驱动下的 poll 操作函数
当应用程序调用 select 或 poll 函数来对驱动程序进行非阻塞访问的时候,驱动程序
file_operations 操作集中的 poll 函数就会执行。所以驱动程序的编写者需要提供对应的 poll 函
数, poll 函数原型如下所示:
unsigned int (*poll) (struct file *filp, struct poll_table_struct *wait)
函数参数和返回值含义如下:
filp: 要打开的设备文件(文件描述符)。
wait: 结构体 poll_table_struct 类型指针, 由应用程序传递进来的。一般将此参数传递给
poll_wait 函数。
返回值:向应用程序返回设备或者资源状态,可以返回的资源状态如下:
POLLIN 有数据可以读取。
POLLPRI 有紧急的数据需要读取。
POLLOUT 可以写数据。
POLLERR 指定的文件描述符发生错误。
POLLHUP 指定的文件描述符挂起。
POLLNVAL 无效的请求。
POLLRDNORM 等同于 POLLIN,普通数据可读
我们需要在驱动程序的 poll 函数中调用 poll_wait 函数, poll_wait 函数不会引起阻塞,只是将应用程序添加到 poll_table 中, poll_wait 函数原型如下:
void poll_wait(struct file * filp, wait_queue_head_t * wait_address, poll_table *p)
参数 wait_address 是要添加到 poll_table 中的等待队列头,参数 p 就是 poll_table,就是file_operations 中 poll 函数的 wait 参数。
阻塞 IO 实验
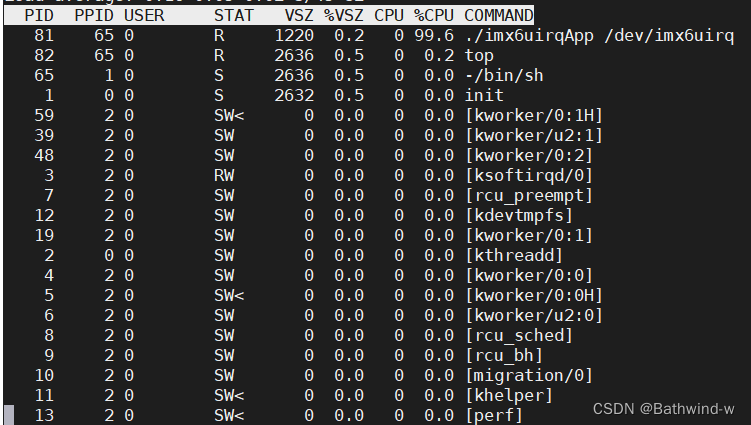
imx6uirqApp 这个应用程序的 CPU 使用率竟然高达 99.6%,这仅仅是一个读取按键值的应用程序,这么高的 CPU 使用率显然是有问题的!原因就在于我们是直接在 while 循环中通过 read 函数读取按键值,因此imx6uirqApp 这个软件会一直运行,一直读取按键值, CPU 使用率肯定就会很高。最好的方法就是在没有有效的按键事件发生的时候,imx6uirqApp 这个应用程序应该处于休眠状态,当有按键事件发生以后 imx6uirqApp 这个应用程序才运行,打印出按键值,这样就会降低 CPU 使用率,
下面开始阻塞实验的编写:
首先设备结构体的编写,里面新增队列头变量。
/* imx6uirq设备结构体 */
struct imx6uirq_dev{dev_t devid; /* 设备号 */ struct cdev cdev; /* cdev */ struct class *class; /* 类 */struct device *device; /* 设备 */int major; /* 主设备号 */int minor; /* 次设备号 */struct device_node *nd; /* 设备节点 */ atomic_t keyvalue; /* 有效的按键键值 */atomic_t releasekey; /* 标记是否完成一次完成的按键,包括按下和释放 */struct timer_list timer;/* 定义一个定时器*/struct irq_keydesc irqkeydesc[KEY_NUM]; /* 按键init述数组 */unsigned char curkeynum; /* 当前init按键号 */wait_queue_head_t r_wait; /* 读等待队列头 */
};
如果我们要在驱动中使用等待队列,必须创建并初始化一个等待队列头,所以在设备结构体信息添加这个变量:wait_queue_head_t r_wait
接下来我们要考虑初始化这个队列头啥的。
static int keyio_init(void)
{unsigned char i = 0;char name[10];int ret = 0;imx6uirq.nd = of_find_node_by_path("/key");if (imx6uirq.nd== NULL){printk("key node not find!\r\n");return -EINVAL;} /* 提取GPIO */for (i = 0; i < KEY_NUM; i++) {imx6uirq.irqkeydesc[i].gpio = of_get_named_gpio(imx6uirq.nd ,"key-gpio", i);if (imx6uirq.irqkeydesc[i].gpio < 0) {printk("can't get key%d\r\n", i);}}/* 初始化key所使用的IO,并且设置成中断模式 */for (i = 0; i < KEY_NUM; i++) {memset(imx6uirq.irqkeydesc[i].name, 0, sizeof(name)); /* 缓冲区清零 */sprintf(imx6uirq.irqkeydesc[i].name, "KEY%d", i); /* 组合名字 */gpio_request(imx6uirq.irqkeydesc[i].gpio, name);gpio_direction_input(imx6uirq.irqkeydesc[i].gpio); imx6uirq.irqkeydesc[i].irqnum = irq_of_parse_and_map(imx6uirq.nd, i);
#if 0imx6uirq.irqkeydesc[i].irqnum = gpio_to_irq(imx6uirq.irqkeydesc[i].gpio);
#endif}/* 申请中断 */imx6uirq.irqkeydesc[0].handler = key0_handler;imx6uirq.irqkeydesc[0].value = KEY0VALUE;for (i = 0; i < KEY_NUM; i++) {ret = request_irq(imx6uirq.irqkeydesc[i].irqnum, imx6uirq.irqkeydesc[i].handler, IRQF_TRIGGER_FALLING|IRQF_TRIGGER_RISING, imx6uirq.irqkeydesc[i].name, &imx6uirq);if(ret < 0){printk("irq %d request failed!\r\n", imx6uirq.irqkeydesc[i].irqnum);return -EFAULT;}}/* 创建定时器 */init_timer(&imx6uirq.timer);imx6uirq.timer.function = timer_function;/* 初始化等待队列头 */init_waitqueue_head(&imx6uirq.r_wait);return 0;
}
主要添加内容如上面代码所示,也就是这一句init_waitqueue_head(&imx6uirq.r_wait);
接下来一个重要的函数就是读函数。读函数如下列所示:
static ssize_t imx6uirq_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{int ret = 0;unsigned char keyvalue = 0;unsigned char releasekey = 0;struct imx6uirq_dev *dev = (struct imx6uirq_dev *)filp->private_data;#if 0/* 加入等待队列,等待被唤醒,也就是有按键按下 */ret = wait_event_interruptible(dev->r_wait, atomic_read(&dev->releasekey)); if (ret) {goto wait_error;}
#endifDECLARE_WAITQUEUE(wait, current); /* 定义一个等待队列 */if(atomic_read(&dev->releasekey) == 0) { /* 没有按键按下 */add_wait_queue(&dev->r_wait, &wait); /* 将等待队列添加到等待队列头 */__set_current_state(TASK_INTERRUPTIBLE);/* 设置任务状态 */schedule(); /* 进行一次任务切换 */if(signal_pending(current)) { /* 判断是否为信号引起的唤醒 */ret = -ERESTARTSYS;goto wait_error;}__set_current_state(TASK_RUNNING); /* 将当前任务设置为运行状态 */remove_wait_queue(&dev->r_wait, &wait); /* 将对应的队列项从等待队列头删除 */}keyvalue = atomic_read(&dev->keyvalue);releasekey = atomic_read(&dev->releasekey);if (releasekey) { /* 有按键按下 */ if (keyvalue & 0x80) {keyvalue &= ~0x80;ret = copy_to_user(buf, &keyvalue, sizeof(keyvalue));} else {goto data_error;}atomic_set(&dev->releasekey, 0);/* 按下标志清零 */} else {goto data_error;}return 0;wait_error:set_current_state(TASK_RUNNING); /* 设置任务为运行态 */remove_wait_queue(&dev->r_wait, &wait); /* 将等待队列移除 */return ret;data_error:return -EINVAL;
}其中核心逻辑重要的地方如下:
DECLARE_WAITQUEUE(wait, current); /* 定义一个等待队列 */if(atomic_read(&dev->releasekey) == 0) { /* 没有按键按下 */add_wait_queue(&dev->r_wait, &wait); /* 将等待队列添加到等待队列头 */__set_current_state(TASK_INTERRUPTIBLE);/* 设置任务状态 */schedule(); /* 进行一次任务切换 */if(signal_pending(current)) { /* 判断是否为信号引起的唤醒 */ret = -ERESTARTSYS;goto wait_error;}__set_current_state(TASK_RUNNING); /* 将当前任务设置为运行状态 */remove_wait_queue(&dev->r_wait, &wait); /* 将对应的队列项从等待队列头删除 */}wait_error:set_current_state(TASK_RUNNING); /* 设置任务为运行态 */remove_wait_queue(&dev->r_wait, &wait); /* 将等待队列移除 */return ret;
在Linux内核中,进程或线程可能需要等待某些条件满足才能继续执行。这种情况在设备驱动程序中尤其常见,比如等待硬件事件(如按键输入)。在这个代码段中,使用了一系列标准的内核函数和宏来实现进程的阻塞和唤醒,这些操作是为了安全和有效地处理进程等待和唤醒,具体包括以下几个步骤:
-
__set_current_state(TASK_INTERRUPTIBLE);
这行代码将当前进程的状态设置为TASK_INTERRUPTIBLE,即可中断的睡眠状态。在这种状态下,进程不会运行,从而不会消耗CPU资源,但它可以被信号等中断唤醒。这是一种资源节约和高效的等待方式。 -
schedule();
schedule()函数是进程调度器的核心功能,它会停止当前进程的执行,并选择另一个进程继续执行。当当前进程调用schedule()后,它会在调度器找到下一个要运行的进程之前进入睡眠状态,直到被唤醒。在我们的场景中,这意味着进程将等待直到按键事件发生(即等待队列被唤醒)。 -
if(signal_pending(current))
在从schedule()返回后,这行代码检查是否有未处理的信号需要当前进程处理。在Linux中,进程可以通过信号与其他进程交互,这些信号可以是用户通过键盘产生的(如Ctrl-C),也可以是其他进程或系统发送的。如果存在待处理的信号,这意味着进程被一个外部事件(而非按键事件)唤醒,这通常需要特殊处理。
特殊处理主要是以下代码: -
-ERESTARTSYS
如果检测到信号,函数返回-ERESTARTSYS。这个特殊的错误码告诉内核如果可能的话应该重新启动系统调用。这是对信号的一种响应方式,允许用户空间程序优雅地处理中断。 -
__set_current_state(TASK_RUNNING);
在确认不是由于信号唤醒后,将进程状态设置回TASK_RUNNING,表示进程现在是活跃的,并准备继续执行。 -
remove_wait_queue(&dev->r_wait, &wait);
最后,从等待队列中移除当前进程。这是必要的清理步骤,以确保等待队列只包含仍需要等待的进程。
接下来就是定时回调函数,因为我们是按键按下经过定时器延时消抖。所以唤醒任务进程应该定义在定时器回调函数中。
void timer_function(unsigned long arg)
{unsigned char value;unsigned char num;struct irq_keydesc *keydesc;struct imx6uirq_dev *dev = (struct imx6uirq_dev *)arg;num = dev->curkeynum;keydesc = &dev->irqkeydesc[num];value = gpio_get_value(keydesc->gpio); /* 读取IO值 */if(value == 0){ /* 按下按键 */atomic_set(&dev->keyvalue, keydesc->value);}else{ /* 按键松开 */atomic_set(&dev->keyvalue, 0x80 | keydesc->value);atomic_set(&dev->releasekey, 1); /* 标记松开按键,即完成一次完整的按键过程 */} /* 唤醒进程 */if(atomic_read(&dev->releasekey)) { /* 完成一次按键过程 *//* wake_up(&dev->r_wait); */wake_up_interruptible(&dev->r_wait);}
}
测试APP与上一节内容基本类似。
非阻塞IO实验
非阻塞IO实验只需要在阻塞IO实验的基础上稍微修改即可。需要再设备读函数中添加:
if (filp->f_flags & O_NONBLOCK) { /* 非阻塞访问 */if(atomic_read(&dev->releasekey) == 0) /* 没有按键按下,返回-EAGAIN */return -EAGAIN;
} else { /* 阻塞访问 *//* 加入等待队列,等待被唤醒,也就是有按键按下 */ret = wait_event_interruptible(dev->r_wait, atomic_read(&dev->releasekey)); if (ret) {goto wait_error;}
}
与上面阻塞实验编写的阻塞函数略有不同,这里用到的是等待事件函数。


区别分析:
让我们更详细地对比一下手动实现等待和唤醒的代码段与使用 wait_event_interruptible() 的差异。通过对每个步骤的详细分析,我们可以更清楚地看到两种方法的优缺点。
手动实现等待和唤醒
手动实现的代码段如下:
if (atomic_read(&dev->releasekey) == 0) {add_wait_queue(&dev->r_wait, &wait);__set_current_state(TASK_INTERRUPTIBLE);schedule();if (signal_pending(current)) {ret = -ERESTARTSYS;goto wait_error;}
}
详细步骤分析
-
添加到等待队列:
- 使用
add_wait_queue()将当前进程添加到dev->r_wait等待队列。这需要手动创建和初始化等待队列元素wait。
- 使用
-
设置进程状态:
- 使用
__set_current_state(TASK_INTERRUPTIBLE)直接设置进程的状态。这种方式较为低级,直接操作进程状态,可能导致竞态条件,如果在设置状态和调用schedule()之间发生中断,可能会错过唤醒事件。
- 使用
-
调度其他任务:
- 调用
schedule()让出CPU,使当前进程挂起,直到被唤醒。
- 调用
-
检查唤醒原因:
- 检查是否由信号唤醒,如果是,则设置返回值
-ERESTARTSYS并跳转到错误处理代码。
- 检查是否由信号唤醒,如果是,则设置返回值
缺点
- 复杂性:需要手动管理等待队列和进程状态,容易出错。
- 竞态条件:在设置进程状态和调度之间可能发生竞态条件。
- 错误处理:需要手动编写代码来处理信号唤醒的情况。
使用 wait_event_interruptible() 的方法
wait_event_interruptible() 的典型用法如下:
if (wait_event_interruptible(dev->r_wait, atomic_read(&dev->releasekey) != 0)) {return -ERESTARTSYS;
}
详细步骤分析
-
等待条件:
wait_event_interruptible()将当前进程添加到等待队列,并在给定的条件(这里是atomic_read(&dev->releasekey) != 0)不满足时进入休眠。只有当条件满足或接收到信号时才会返回。
-
自动处理进程状态和调度:
- 这个函数内部自动设置进程状态为
TASK_INTERRUPTIBLE并在必要时调用schedule()。这减少了竞态条件的风险。
- 这个函数内部自动设置进程状态为
-
自动错误处理:
- 如果由于信号而唤醒,函数返回非零值,通常是
-ERESTARTSYS,这简化了错误处理代码。
- 如果由于信号而唤醒,函数返回非零值,通常是
接下来就是非阻塞要用的poll函数。
/** @description : poll函数,用于处理非阻塞访问* @param - filp : 要打开的设备文件(文件描述符)* @param - wait : 等待列表(poll_table)* @return : 设备或者资源状态,*/
unsigned int imx6uirq_poll(struct file *filp, struct poll_table_struct *wait)
{unsigned int mask = 0;struct imx6uirq_dev *dev = (struct imx6uirq_dev *)filp->private_data;poll_wait(filp, &dev->r_wait, wait); /* 将等待队列头添加到poll_table中 */if(atomic_read(&dev->releasekey)) { /* 按键按下 */mask = POLLIN | POLLRDNORM; /* 返回PLLIN */}return mask;
}
接下来也要在设备操作函数中关联poll函数。
/* 设备操作函数 */
static struct file_operations imx6uirq_fops = {.owner = THIS_MODULE,.open = imx6uirq_open,.read = imx6uirq_read,.poll = imx6uirq_poll,
};
接下来就是编写测试APP函数。我们需要在测试APP中用poll函数去反复查询设备是否可用。
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#include "poll.h"
#include "sys/select.h"
#include "sys/time.h"
#include "linux/ioctl.h"
/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : noblockApp.c
作者 : 左忠凯
版本 : V1.0
描述 : 非阻塞访问测试APP
其他 : 无
使用方法 :./blockApp /dev/blockio 打开测试App
论坛 : www.openedv.com
日志 : 初版V1.0 2019/9/8 左忠凯创建
***************************************************************//** @description : main主程序* @param - argc : argv数组元素个数* @param - argv : 具体参数* @return : 0 成功;其他 失败*/
int main(int argc, char *argv[])
{int fd;int ret = 0;char *filename;struct pollfd fds;fd_set readfds;struct timeval timeout;unsigned char data;if (argc != 2) {printf("Error Usage!\r\n");return -1;}filename = argv[1];fd = open(filename, O_RDWR | O_NONBLOCK); /* 非阻塞访问 */if (fd < 0) {printf("Can't open file %s\r\n", filename);return -1;}#if 0/* 构造结构体 */fds.fd = fd;fds.events = POLLIN;while (1) {ret = poll(&fds, 1, 500);if (ret) { /* 数据有效 */ret = read(fd, &data, sizeof(data));if(ret < 0) {/* 读取错误 */} else {if(data)printf("key value = %d \r\n", data);} } else if (ret == 0) { /* 超时 *//* 用户自定义超时处理 */} else if (ret < 0) { /* 错误 *//* 用户自定义错误处理 */}}
#endifwhile (1) { FD_ZERO(&readfds);FD_SET(fd, &readfds);/* 构造超时时间 */timeout.tv_sec = 0;timeout.tv_usec = 500000; /* 500ms */ret = select(fd + 1, &readfds, NULL, NULL, &timeout);switch (ret) {case 0: /* 超时 *//* 用户自定义超时处理 */break;case -1: /* 错误 *//* 用户自定义错误处理 */break;default: /* 可以读取数据 */if(FD_ISSET(fd, &readfds)) {ret = read(fd, &data, sizeof(data));if (ret < 0) {/* 读取错误 */} else {if (data)printf("key value=%d\r\n", data);}}break;} }close(fd);return ret;
}主要来看下while(1)里面这段非阻塞处理的程序。
首先:FD_ZERO 宏用于初始化文件描述符集,将其清空,确保没有任何文件描述符被设置在集合中。这是使用 select 函数前的必要步骤,因为 select 函数会检查传入的文件描述符集来决定需要监听哪些文件描述符的状态。如果不先清空文件描述符集,那么可能会包含一些无效或不想监听的文件描述符,从而导致不可预测的行为。
FD_SET 宏用于向文件描述符集中添加一个特定的文件描述符。这意味着您告诉 select 函数,您对这个特定的文件描述符(fd)感兴趣,希望监听它的读状态(是否有数据可读)。每次调用 FD_SET 都会将一个文件描述符加入到集合中。
在使用 select 函数时,第一个参数需要特别注意,它是 nfds,这个参数指定了要检查的文件描述符集中的最高文件描述符加一。这是因为 select 函数使用这个值来确定需要检查的文件描述符范围,从文件描述符 0 到 nfds-1。
相关文章:
Linux 阻塞和非阻塞 IO 实验学习
Linux 阻塞和非阻塞 IO 实验学习 IO 指的是 Input/Output,也就是输入/输出,是应用程序对驱动设备的输入/输出操作。当应用程序对设备驱动进行操作的时候,如果不能获取到设备资源,那么阻塞式 IO 就会将应用程序对应的线程挂起&…...

JuiceFS 社区版 v1.2 发布,新增企业级权限管理、平滑升级功能
JuiceFS 社区版 v1.2 今天正式发布,这是自 2021 年开源以来的第三个大版本。v1.2 也是一个长期支持版本(LTS)。我们将持续维护 v1.2 以及 v1.1 这两个版本,v1.0 将停止更新。 JuiceFS 是为云环境设计的分布式文件系统,…...
虚拟3D沉浸式展会编辑平台降低了线上办展的门槛
在数字化浪潮的引领下,VR虚拟网上展会正逐渐成为企业展示品牌实力、吸引潜在客户的首选平台。我们与广交会携手走过三年多的时光,凭借优质的服务和丰富的经验,赢得了客户的广泛赞誉。 面对传统展会活动繁多、企业运营繁忙的挑战,许…...

泛微E9开发 查询页面添加按钮,完成特定功能
查询页面添加按钮,完成特定功能 1、关联知识(查询页面实现新增按钮)2、功能实现2.1. 点击按钮,输出选中的checkbox的值2.2. 点击按钮,打开一个自定义对话框 3、实现方法 1、关联知识(查询页面实现新增按钮&…...
初学51单片机之数字秒表
不同数据类型间的相互转换 在C语言中,不同数据类型之间是可以混合运算的。当表达式中的数据类型不一致时,首先转换为同一类型,然后再进行计算。C语言有两种方式实现类型转换。一是自动类型转换,另外一种是强制类型转换。 转换的主…...

SpringBoot整合justauth实现多种方式的第三方登陆
目录 0.准备工作 1.引入依赖 2.yml文件 3. Controller代码 4.效果 参考 0.准备工作 你需要获取三方登陆的client-id和client-secret 以github为例 申请地址:Sign in to GitHub GitHub 1.引入依赖 <?xml version"1.0" encoding"UTF-8&quo…...
【Java算法】滑动窗口
🔥个人主页: 中草药 🔥专栏:【算法工作坊】算法实战揭秘 👖一. 长度最小的子数组 题目链接:209.长度最小的子数组 算法原理 滑动窗口 滑动窗口算法常用于处理数组/字符串等序列问题,通过定义一…...

C# —— 属性和字段
属性和字段的区别 1.都是定义在一个类中,属于类成员变量 2.字段一般都是私有的private,属性一般是公开的Public 3.字段以小驼峰命名方式 age,属性一般是以大驼峰命名 Age 4.字段可以存储数据,属性不能存储数据,通过属性…...

【计算机视觉】人脸算法之图像处理基础知识(四)
图像的几何变换 图像的几何变换是指在不改变图像内容的前提下对图像的像素进行空间几何变换。主要包括图像的平移变换、镜像变换、缩放和旋转等。 1.插值算法 插值通常用来放缩图像大小,在图像处理中常见的插值算法有最邻近插值法、双线性插值法、二次立方、三次…...

探索 Spring Boot 集成缓存功能的最佳实践
在线工具站 推荐一个程序员在线工具站:程序员常用工具(http://cxytools.com),有时间戳、JSON格式化、文本对比、HASH生成、UUID生成等常用工具,效率加倍嘎嘎好用。 程序员资料站 推荐一个程序员编程资料站:…...

微信小程序使用方法
一.在网页注册小程序账号(在未注册的情况下) 1.如果你还没有微信公众平台的账号,请先进入微信公众平台首页,点击 “立即注册” 按钮进行注册。我们选择 “小程序” 即可。 接着填写账号信息,需要注意的是,…...
前后端分离的后台管理系统源码,快速开发OA、CMS网站后台管理、毕业设计项目
那有没有一款软件解-决这种现状呢?答案是肯定的。引入我们的软件——eladmin。 介绍 ELADMIN,一个简单且易上手的 Spring boot 后台管理框架,已发布 Mybatis-Plus 版本,为开发者提供了一个全-面、高-效的解-决方案。 特点 高-效率:前后端完全分离,项目简单可配,内置代码…...
[深度学习]--分类问题的排查错误的流程
原因复现: 原生的.pt 好使, 转化后的 CoreML不好使, 分类有问题。 yolov8 格式的支持情况 Format Argument Suffix CPU GPU 0 PyTorch - .pt True True 1 Tor…...

微信小程序简易录音机
首先先创建一个项目(想必大家都会啦那就直接开干) 首先上html结构 <view class"wx-container"><view id"title">录音机</view><view id"time">{{hours}}:{{minute}}:{{second}}</view>&l…...

Ollama深度探索:AI大模型本地部署的全面教程
目录 引言一、Ollama概述1、定义与定位2、核心功能3、技术优势4、应用场景 二、安装与配置1、系统要求2、安装方法3、配置指南4、启动Ollama服务 四、快速开始1、启动Ollama2、部署运行模型3、REEST API 五、自定义模型1、定制化的必要性2、使用Modelfile定制模型3、参数调整4、…...
文心一言 VS 讯飞星火 VS chatgpt (285)-- 算法导论21.2 4题
四、请给出图 21-3 所示操作序列的一个运行时间的渐近紧确界,假定使用链表表示和加权合并启发式策略。如果要写代码,请用go语言。 文心一言: 图 21-3 没有直接给出,但通常这种操作序列可能与某种数据结构(如并查集或…...

基于springboot实现影院订票系统项目【项目源码+论文说明】计算机毕业设计
基于springboot实现影院订票系统演示 摘要 现代经济快节奏发展以及不断完善升级的信息化技术,让传统数据信息的管理升级为软件存储,归纳,集中处理数据信息的管理方式。本影院订票系统就是在这样的大环境下诞生,其可以帮助管理者在…...

Linux 常用命令合集
进入root模式 su -> 回车 -> 输入root用户密码关闭系统 方法1: shutdown -h now 方法2: init 0 方法3: telinit 0按预定时间关闭系统 shutdown -h hours:minutes &取消按预定时间关闭系统 shutdown -c重启 shutdown -r now重启…...
Vue3插件安装
一、volar插件安装 volar:Vue文件的语法提示和高亮提醒。volar已经更名为Vue - Official,其安装步骤如下。 (1)打开vscode,点击扩展面板,在搜索窗口中输入volar,选择Vue - Official进行安装。 (2࿰…...
Redis精要
一、什么是缓存击穿、缓存穿透、缓存雪崩? 缓存穿透 【针对大量非法访问的请求,缓存中没有,直接访问DB】 缓存穿透指的查询缓存和数据库中都不存在的数据,这样每次请求直接打到数据库,就好像缓存不存在 一样。 对于系…...
)
从IR2184到全桥驱动:搞懂H桥电路防短路与死区设置(附电路图分析)
从IR2184到全桥驱动:H桥电路防短路与死区设置的工程实践 在电机控制系统中,H桥电路的设计可靠性直接决定了整个驱动方案的成败。许多工程师在初次设计基于IR2184的全桥驱动时,往往会被"上下桥臂直通"问题困扰——这种短路状态能在微…...

硬件工程师如何高效阅读技术博客:从EDA工具到IP核的实战学习指南
1. 从“本周最佳”到深度解析:一位硬件工程师的EDA与IP博客阅读笔记每周五下午,当项目代码编译的进度条缓慢爬升时,我总会习惯性地打开几个固定的书签,快速浏览过去一周里全球同行们又分享了哪些新想法、新工具或是踩了哪些新坑。…...
)
保姆级教程:在银河麒麟V10上为gcc编译的程序添加可执行权限(附kysec_set命令详解)
银河麒麟V10系统下gcc编译程序执行权限问题全解析 在银河麒麟V10操作系统中,许多开发者首次使用gcc编译程序后,会遇到一个看似简单却令人困惑的问题:明明已经为生成的可执行文件添加了传统Linux权限(如chmod x)&#…...

深入解析XXD2212电调:从PWM信号到三相驱动的实战指南
1. XXD2212电调初探:你的无刷电机控制中枢 第一次拿到XXD2212电调时,我差点把它当成了普通的舵机控制器——它们的外形实在太像了。这块巴掌大的电路板实际上是一个精密的能量转换中枢,负责将微控制器的PWM信号转化为三相无刷电机能理解的语言…...

QMCDecode终极指南:如何快速解锁QQ音乐加密文件实现跨设备播放
QMCDecode终极指南:如何快速解锁QQ音乐加密文件实现跨设备播放 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载目录ÿ…...

终极分屏神器Nucleus Co-Op:一台电脑实现4人同时开黑完整指南
终极分屏神器Nucleus Co-Op:一台电脑实现4人同时开黑完整指南 【免费下载链接】nucleuscoop Starts multiple instances of a game for split-screen multiplayer gaming! 项目地址: https://gitcode.com/gh_mirrors/nu/nucleuscoop 你是否曾因朋友聚会时电脑…...

IP第一次作业
...

智慧树刷课插件:3个核心功能帮你告别重复点击,学习效率提升300%
智慧树刷课插件:3个核心功能帮你告别重复点击,学习效率提升300% 【免费下载链接】zhihuishu 智慧树刷课插件,自动播放下一集、1.5倍速度、无声 项目地址: https://gitcode.com/gh_mirrors/zh/zhihuishu 还在为智慧树平台繁琐的手动操作…...

DISTINCT 带 WHERE 仍全表扫描?两层优化刀法拆解
DISTINCT 带 WHERE 仍全表扫描?两层优化刀法拆解 引言:一个看似多余的 DISTINCT,藏着性能陷阱 几乎每个写过 SQL 的人都用过 DISTINCT。它的语义很简单——去掉重复行。但"简单"不等于"快"。在一个客户的生产环境中&…...

《Java 100 天进阶之路》第1篇:编程语言类型有哪些?我心中的TOP1编程语言,什么是Java跨平台性?
第1篇:编程语言类型有哪些?我心中的TOP1编程语言,什么是Java跨平台性? 一、核心知识点 编程语言的三大类型:机器语言、汇编语言、高级语言Java为什么是“一次编写,到处运行”(跨平台原理&…...