带颜色的3D点云数据发布到ros1中(通过rviz显示)python、C++
ros中发布点云数据xyz以及带颜色的点云数据xyzrgb
- ros中发布点云数据xyz
- 可以直接用python来做或者C++(看个人偏好)
- ros中发布带颜色的点云数据xyzrgb
- 环境
- 1.新建ROS工作空间
- 2.创建功能包
ros中发布点云数据xyz
可以直接用python来做或者C++(看个人偏好)
在这里我们带有颜色的点云数据格式为x y z c
其中c值为float型,有四种值1.0,2.0,3.0,4.0

代码文件b.py,具体内容如下:
import rospy
from sensor_msgs.msg import Image,PointCloud2
from cv_bridge import CvBridge
import numpy as np
import os
import cv2
from a import *
import open3d as o3dDATA_PATH='/home/cxh/project/0618/point_cloud_selected.txt'
if __name__=='__main__':rospy.init_node('jizhui_node',anonymous=True)# cam_pub=rospy.Publisher('kitti_cam',Image,queue_size=10)pcl_pub=rospy.Publisher('/jizhui_pcl',PointCloud2,queue_size=1)#创建点云发布者,queue_size=10表示消息队列的大小bridge=CvBridge()#创建一个CvBridge实例,用于在OpenCV图像与ROS图像消息之间进行转换# rate=rospy.Rate(1)#设置发布频率为10Hzrate=rospy.Rate(5,reset=True)frame=0#初始化帧计数器def load_point_cloud(file_path):"""从文本文件中加载点云数据"""point_cloud = []color=[]with open(file_path, 'r') as f:for line in f:if line.strip(): # 忽略空行try:# 假设每行的格式为: x y zx, y, z, c= map(lambda x: round(float(x) / 100, 5) if x != line.strip().split()[-1] else float(x), line.strip().split())point_cloud.append([x, y, z])#读取c的值,并把c的值映射成对应RGB值# 1.0:灰色[220,220,220]# 2.0:蓝色[173,216,230]# 3.0:黄色[255,215,0]# 4.0:红色[255,182,193]# r, g, b = color_mapping(c)# color.append([r, g, b])# print("x y z",point_cloud)except ValueError:rospy.logerr("Error parsing line: {}".format(line))return np.array(point_cloud)# 循环播放,通过frame控制帧数while not rospy.is_shutdown():#主循环在ROS节点关闭前一直运行# 读取点云数据 point_cloud= load_point_cloud(DATA_PATH)#,color# print("shape:",point_cloud.shape)#49行3列publish_pcl(point_cloud,pcl_pub,'map')#调用publish_pcl函数将点云数据发布到ROS主题jizhui_pcl。color,# pcl_pub.publish(pcl2_msg)rospy.loginfo('published')#在日志中记录发布信息rate.sleep()#按照设定的频率进行休眠
文件a.py具体内容如下:
from sensor_msgs.msg import PointCloud2,PointField
import sensor_msgs.point_cloud2 as pcl2from std_msgs.msg import Header
import rospy
import numpy as np
def publish_pcl(point_cloud,pcl_pub,frame_id):#定义点云数据的ROS发布者。if point_cloud.size == 0:rospy.logwarn("Empty point cloud data, skipping publish.")returnheader=Header()header.stamp=rospy.Time.now()header.frame_id=frame_idpoint_cloud_message=pcl2.create_cloud_xyz32(header,point_cloud)pcl_pub.publish(point_cloud_message)
发布到ros的步骤如下
#启动 ROS master
#启动一个终端键入
roscore
#在python文件b.py下运行代码
python b.py
#再另起一个终端键入
rviz
启动了 RViz 后点击界面左下角的Add按钮并添加一个 PointCloud2 显示
即可在 RViz 中看到点云了
**注意:**对于发布带颜色的点云数据,由于python版没有creat_xyzrgb32 ,这个功能函数只有C++有,python的需要自己写一个这样的功能函数。我本人也参考b站博主学习视频链接: 用python将着色点云在ros中发布—解析PointCloud2与Rviz可视化源码弄了一下午没成功,就改用C++来做了!!
(ps这里还有一个特别需要注意的点,就是有的点云图很大且高,小窗口下不容易发现,我们一开始就因为这个问题郁闷了很久,一遍遍检查代码,后来发现早就生成了,只是没有吧窗口放大,多拖拉几下就能找到躲在角落处的点云图!!!)
ros中发布带颜色的点云数据xyzrgb
环境
环境:
Ubuntu20.04
ROS noetic
C++
1.新建ROS工作空间
mkdir -p PointCloundShow_ws/src
cd PointCloundShow_ws/src
catkin_init_workspace
cd ..
catkin_make
2.创建功能包
cd src
catkin_create_pkg pointcloundshow pcl_ros roscpp rospy sensor_msgs std_msgs
在功能包的src文件夹下新建cpp文件pcl_colored.cpp
代码文件pcl_colored.cpp内容如下:
#include <ros/ros.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl_conversions/pcl_conversions.h>
#include <fstream>
#include <sstream>
#include <vector>
#include <iostream>
#include <string>using namespace std;
uint32_t color_mapping(float c) {if (c == 1.0) {return (220 << 16) | (220 << 8) | 220; // 灰色} else if (c == 2.0) {return (173 << 16) | (216 << 8) | 230; // } else if (c == 3.0) {return (255 << 16) | (215 << 8) | 0; // } else {return (255 << 16) | (182 << 8) | 193; // }
}void readPointCloudFromFile(const string& filename, pcl::PointCloud<pcl::PointXYZRGB>::Ptr& cloud) {ifstream infile(filename);if (!infile.is_open()) {cerr << "Could not open file: " << filename << endl;return;}string line;while (getline(infile, line)) {istringstream iss(line);float x, y, z, c;if (!(iss >> x >> y >> z >> c)) {cerr << "Error reading line: " << line << endl;continue;}// 缩小 x, y, z 的值100倍x /= 100.0f;y /= 100.0f;z /= 100.0f;pcl::PointXYZRGB point;point.x = x;point.y = y;point.z = z;uint32_t rgb = color_mapping(c);point.rgb = *reinterpret_cast<float*>(&rgb);cloud->points.push_back(point);}cloud->width = cloud->points.size();cloud->height = 1;cloud->is_dense = true;infile.close();
}
int main(int argc, char** argv) {// 初始化ROS节点ros::init(argc, argv, "pcl_create_xyzrgb");ros::NodeHandle nh;// 创建一个发布者ros::Publisher pcl_pub = nh.advertise<sensor_msgs::PointCloud2>("pcl_output_colored", 1);// 创建一个点云对象pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>());// 从文件读取点云数据string filename = "/home/cxh/project/0618/point_cloud_selected.txt";readPointCloudFromFile(filename, cloud);// 将点云数据转换为ROS消息sensor_msgs::PointCloud2 output;pcl::toROSMsg(*cloud, output);output.header.frame_id = "map";// 发布点云消息ros::Rate loop_rate(1);while (ros::ok()) {output.header.stamp = ros::Time::now();pcl_pub.publish(output);ros::spinOnce();loop_rate.sleep();}return 0;
}然后将下面的编译规则写到功能包的CMakeLists.txt文件中
find_package(PCL REQUIRED)
include_directories(include${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_executable(pcl_colored.cpp src/pcl_colored.cpp)
target_link_libraries(pcl_colored.cpp ${catkin_LIBRARIES} ${PCL_LIBRARIES})
翻倒CMakeLists.txt文件的最后一行添加,我们的如下:

如图所示,因为我们用C++写了两个文件,一个是pcl_create.cpp另一个是目前的pcl_colored.cpp,所以我们这个是追加到后面的,供参考!
回到工作空间路径下也就是PointCloundShow_ws,输入catkin_make进行编译
然后再更新一下:source devel/setup.bash(**注意:**只要你修改过你工作空间任何一处代码,每次都需要重新编译和更新!!!另外每新建了一个cpp文件都需要在CMakeLists.txt文件做添加!!!)
然后新起一个终端终端运行roscore指令,
再在刚的source命令那个终端运行rosrun pointcloundshow pcl_create
最后再另起一个终端允许rviz指令
打开rviz
在rviz中左下角点Add增加PointCloud2d
topic 选 /pcl_output
fixed Frame 输入odom
或者直接点左下角的Add然后会弹出一个名字为rviz的框,选择By topic下的对应发布的点云名字
即可看到发布的带有颜色的点云图

相关文章:
带颜色的3D点云数据发布到ros1中(通过rviz显示)python、C++
ros中发布点云数据xyz以及带颜色的点云数据xyzrgb ros中发布点云数据xyz可以直接用python来做或者C(看个人偏好) ros中发布带颜色的点云数据xyzrgb环境1.新建ROS工作空间2.创建功能包 ros中发布点云数据xyz 可以直接用python来做或者C(看个人偏好) 在这里我们带有颜色的点云数…...

python学习—列表和元组
系列文章目录 python学习—合并TXT文本文件 python学习—统计嵌套文件夹内的文件数量并建立索引表格 python学习—查找指定目录下的指定类型文件 python学习—年会不能停,游戏抽签抽奖 python学习—循环语句-控制流 python学习—合并多个Excel工作簿表格文件 文章目…...

c++题目_水仙花数
水仙花数-普及-题目-ACGO题库 题目描述 求100-n中的水仙花数。一个数x,x的百位、十位、个位,分别用a、b、c来表示; 当a * a * a b * b * b c * c * c x时,x就被称为水仙花数。(n< 999) 输入格式 一行一个整数n 输出格式…...

使用 Iceberg、Tabular 和 MinIO 构建现代数据架构
现代数据环境需要一种新型的基础架构,即无缝集成结构化和非结构化数据、轻松扩展并支持高效的 AI/ML 工作负载的基础架构。这就是现代数据湖的用武之地,它为您的所有数据需求提供了一个中心枢纽。然而,构建和管理有效的数据湖可能很复杂。 这…...

jnp.linalg.norm
jnp.linalg.norm 是 JAX 中用于计算向量或矩阵的范数的函数。JAX 是一个用于高性能机器学习研究的 Python 库,它提供了与 NumPy 类似的 API,但支持自动微分和加速计算。jnp 是 JAX 的 NumPy 接口。 jnp.linalg.norm 的基本语法 jnp.linalg.norm(x, ord…...
20240621在飞凌的OK3588-C开发板的Buildroot系统中集成i2ctool工具
20240621在飞凌的OK3588-C开发板中打开i2ctool工具 2024/6/21 17:44 默认继承的i2c工具: rootrk3588-buildroot:/# rootrk3588-buildroot:/# i2c i2c-stub-from-dump i2cdump i2cset i2cdetect i2cget i2ctransfer rootrk3588-…...

ARM32开发--存储器介绍
知不足而奋进 望远山而前行 目录 文章目录 前言 存储器分类 RAM ROM EEPROM Flash 总结 前言 在现代计算机系统中,存储器扮演着至关重要的角色,不仅影响着数据的存取速度和稳定性,还直接关系到计算机系统的性能和应用场景的选择。存…...

Web服务器
自学python如何成为大佬(目录):https://blog.csdn.net/weixin_67859959/article/details/139049996?spm1001.2014.3001.5501 当在浏览器输入URL后,浏览器会先请求DNS服务器,获得请求站点的 IP 地址(即根据URL地址“www.mingrisoft.com”获取…...
大语言模型-Transformer
目录 1.概述 2.作用 3.诞生背景 4.历史版本 5.优缺点 5.1.优点 5.2.缺点 6.如何使用 7.应用场景 7.1.十大应用场景 7.2.聊天机器人 8.Python示例 9.总结 1.概述 大语言模型-Transformer是一种基于自注意力机制(self-attention)的深度学习…...

POI:接收上传上来的excel,解析并导入到数据库
目录 1、控制层 2、业务层(主要逻辑) 1、控制层 因为前端设置了只能上传1个文件,这里直接取一个。 RequestMapping(value "/shebeiDaoru.ctrl", method RequestMethod.POST, produces "application/json;charsetUTF-8&q…...

网页的CSS和JavaScript文件没有自动更新, 解决办法
项目场景: 无人值守的场馆预定以及管理 问题描述 更新了CSS和JavaScript,访问始终样式不对 原因分析: 浏览器缓存了你的CSS和JavaScript文件 浏览器缓存了你的CSS和JavaScript文件。当文件的修改时间戳(last-modifiedÿ…...

Go语言 获取服务器资源磁盘Disk情况
1、获取整个磁盘的总量、已使用量、使用率 package mainimport ("fmt""github.com/shirou/gopsutil/disk""log" )func main() {// 获取所有挂载点的磁盘使用率信息partitions, err : disk.Partitions(false)if err ! nil {log.Fatalf("Err…...

使用上海云盾 CDN 和 CloudFlare 后 Nginx、 WordPress、 Typecho 获取访客真实 IP 方法
最近因为被 DDoS/CC 攻击的厉害,明月就临时的迁移了服务器,原来的服务器就空置下来了,让明月有时间对服务器进行了重置重新部署安装生产环境。因为站点同时使用了上海云盾和 CloudFlare(具体思路可以参考【国内网站使用国外 CloudFlare CDN 的思路分享】一文)两个 CDN 服务…...

深入探究RTOS的任务调度
阅读引言: 此文将会从一个工程文件, 一步一步的分析RTOS的任务调度实现, 这里选用FreeRTOS分析, 别的也差不多的, 可能在细节上有少许不一样。 目录 1, 常见嵌入式实时操作系统 2, 任务调度的…...

【shell脚本速成】函数
文章目录 一、函数1.1、函数介绍1.2、函数定义1.3、函数调用 🌈你好呀!我是 山顶风景独好 🎈欢迎踏入我的博客世界,能与您在此邂逅,真是缘分使然!😊 🌸愿您在此停留的每一刻…...
拒绝零散碎片, 一文理清MySQL的各种锁
系列文章目录 学习MySQL先有全局观,细说其发展历程及特点 Mysql常用操作,谈谈排序与分页 拒绝零散碎片, 一文理清MySQL的各种锁(收藏向) 系列文章目录一、MySQL的锁指什么二、排他与共享三、全局锁(Global…...

P5711 【深基3.例3】闰年判断
1. 题目链接 https://www.luogu.com.cn/problem/P5711 P5711 【深基3.例3】闰年判断 2. 题目描述 题目描述:判断一个数是否是闰年 输入:输入一个整数n 输出:输出1或0,如果是闰年,输出1,否则输出0 3. 我的…...

基于Raft算法实现的分布式键值对存储系统——学习笔记
目录 1 基于Raft算法实现的分布式键值对存储系统 1.1 模块 2 Raft 算法 2 .1 概念 2.2 raft角色(先简单了解,方便后续阅读) 2.3 raft想解决什么问题? 2.4 选举领导 2.5 领导者故障 附录: 参考文献࿱…...
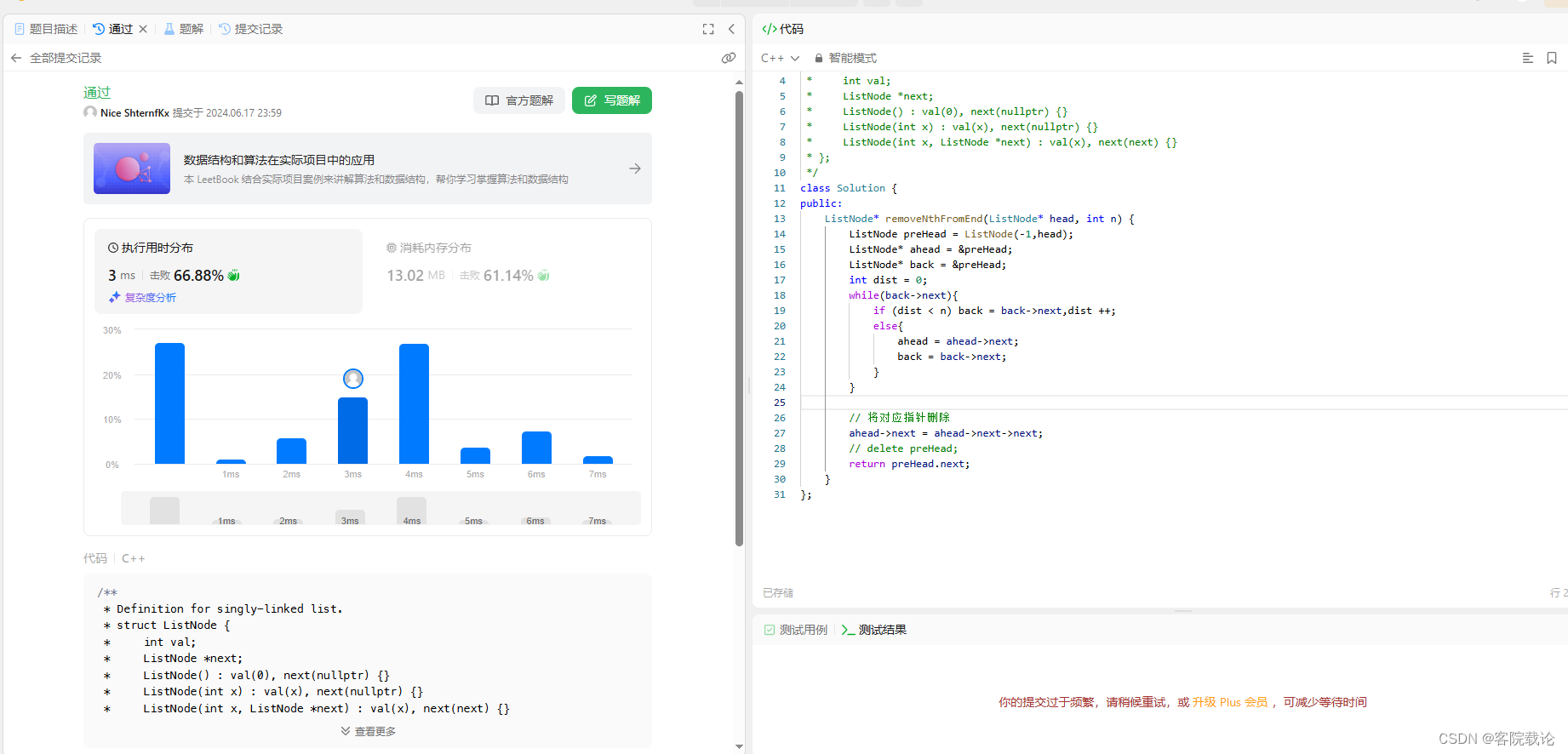
秋招突击——6/17——复习{整理昨天的面试资料}——新作{删除链表倒数第n个节点}
文章目录 引言复习新作删除链表倒数第N个节点题目描述个人实现参考实现 总结 引言 主管面,面的很凄惨,不过无所谓了,我已经尽力了。上午都在整理的面经,没有复习算法,而且这两天要弄一下论文,二十号就要提…...
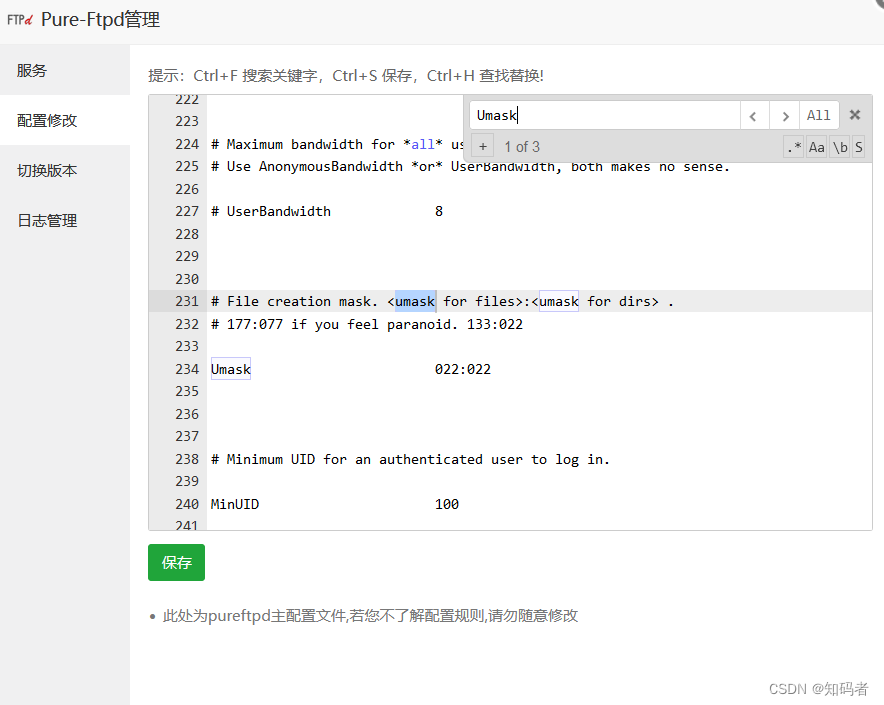
宝塔面板使用技巧(pure-FTP)上传文件和文件夹默认权限644的修改
前言 科技在进步各种各样的开源软件和库让我们应接不暇,我估计现在所有做php开发的人员都知道宝塔面板,我就经常用,但是不知道大家出现过一个问题不就是在我们开发过程中需要实时的给服务器上传我们开发的文件那么就涉及到了宝塔自带的pure-F…...

GD32F103C8T6烧录方式全解析:串口ISP、ST-Link Utility、Keil在线,哪种最适合你?
GD32F103C8T6烧录方案深度评测:从原型开发到量产部署的全场景指南 在嵌入式开发领域,选择正确的程序烧录方式往往决定着开发效率和生产成本。作为STM32F103的国产替代方案,GD32F103C8T6凭借其出色的性价比赢得了广泛关注。但许多开发者在迁移…...

对比直接使用厂商 API 体验 Taotoken 在模型切换上的便利性
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接使用厂商 API 体验 Taotoken 在模型切换上的便利性 在个人开发项目中接入大模型时,开发者通常面临一个选择&am…...

3分钟掌握跨平台模组下载神器:WorkshopDL全攻略
3分钟掌握跨平台模组下载神器:WorkshopDL全攻略 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL 还在为Epic Games或GOG平台的游戏无法使用Steam创意工坊模组而烦恼吗…...

避坑指南:Unity游戏在Linux上运行报错?OpenCV依赖和文件权限问题排查实录
Unity游戏Linux部署避坑指南:从权限修复到OpenCV依赖全解析 当你在Ubuntu上双击那个刚导出的Unity游戏.x86_64文件时,屏幕却弹出一行冰冷的错误信息——这种从云端跌入谷底的体验,每个跨平台开发者都经历过。不同于Windows的一键运行…...

UVa 366 Cutting Up
题目描述 拼布者经常需要将布料切割成 111 \times 111 的小正方形。他们有一种特殊工具(旋转切割刀),可以一次切割多层布料,切割层数的上限由布料类型决定(题目输入的第一个参数 KKK)。切割时,无…...

Scarab空洞骑士模组管理器:2024年最完整的安装与使用指南
Scarab空洞骑士模组管理器:2024年最完整的安装与使用指南 【免费下载链接】Scarab An installer for Hollow Knight mods written with Avalonia. 项目地址: https://gitcode.com/gh_mirrors/sc/Scarab 还在为空洞骑士模组安装的复杂流程而烦恼吗?…...

三维重建实时映射技术在智慧水利中的核心应用
三维重建实时映射技术在智慧水利中的核心应用在国家大力推进数字孪生水利建设、实现水安全精准保障的背景下,智慧水利已从传统监测、调度向全域感知、智能预判、协同处置、一屏统管升级。智慧水利的核心目标,是实现对江河湖库、灌区、泵站、堤坝、闸站等…...

Windows Android子系统深度优化:WSABuilds项目架构解析与实战部署指南
Windows Android子系统深度优化:WSABuilds项目架构解析与实战部署指南 【免费下载链接】WSABuilds Run Windows Subsystem For Android on your Windows 10 and Windows 11 PC using prebuilt binaries with Google Play Store (MindTheGapps) and/or Magisk or Ker…...

终极免费换肤方案:R3nzSkin国服版完整使用教程
终极免费换肤方案:R3nzSkin国服版完整使用教程 【免费下载链接】R3nzSkin-For-China-Server Skin changer for League of Legends (LOL) 项目地址: https://gitcode.com/gh_mirrors/r3/R3nzSkin-For-China-Server 想要在英雄联盟国服免费体验所有皮肤&#x…...

企业级后端四层架构实战:从理论到代码的清晰落地
1. 项目概述:一个四层架构的实战蓝图最近在GitHub上看到一个挺有意思的项目,叫BTawaifi/four-layer-system。光看名字,你可能会觉得这又是一个老生常谈的“四层架构”理论教程,无非是Controller、Service、Repository那套东西。但…...