机械臂 CoppeliaSim Simulink联合仿真
实现机械臂在CoppeliaSim(以前称为V-REP)和Simulink上的联合仿真涉及多个步骤,包括环境设置、模型导入、通信配置、控制算法设计和测试调试。
- 前期准备
- 安装软件
- 配置工作环境
- 创建和配置CoppeliaSim场景
- 导入机械臂模型
- 配置机械臂参数
- 在Simulink中创建控制模型
- 创建新的Simulink模型
- 添加和配置通信模块
- 设计控制算法
- 建立CoppeliaSim和Simulink之间的通信
- 使用远程API
- 设置TCP/IP通信
- 实现实时控制
- 配置实时控制参数
- 测试和验证控制算法
- 调试和优化
- 常见问题和解决方案
- 性能优化
- 结论
1. 前期准备
1.1 安装软件
CoppeliaSim
- 下载地址:CoppeliaSim下载页面
- 选择适合你操作系统的版本(Windows 64-bit)。
- 下载并安装CoppeliaSim,按照提示完成安装过程。
MATLAB & Simulink
- 访问MATLAB官方网站:MathWorks MATLAB下载页面
- 根据你的许可证类型下载并安装MATLAB和Simulink。
- 确保你安装了Simulink及其相关工具箱(如控制系统工具箱)。
UR5e机械臂模型
- 下载UR5e机械臂模型,这里使用Universal Robots提供的标准UR5e模型。
- 确保模型文件格式与CoppeliaSim兼容(通常是
.ttm或.ttb文件)。
1.2 配置工作环境
设置MATLAB路径
- 打开MATLAB,设置工作路径到你保存Simulink模型和相关文件的目录。
matlab
复制代码
addpath('C:\Your\Simulink\Model\Directory');
配置CoppeliaSim远程API
- 在CoppeliaSim安装目录中找到
programming/remoteApiBindings/matlab文件夹,将其添加到MATLAB路径中:
matlab
复制代码
addpath('C:\Program Files\CoppeliaRobotics\CoppeliaSimEdu\programming\remoteApiBindings\matlab');
2. 创建和配置CoppeliaSim场景
2.1 导入机械臂模型
- 打开CoppeliaSim,创建一个新的场景。
- 从文件菜单中选择“导入”,然后选择UR5e机械臂模型文件。
- 确保模型正确加载,并且机械臂的各个部分(连杆、关节、末端执行器等)显示在场景中。
2.2 配置机械臂参数
- 选择UR5e机械臂的根节点(通常是机械臂基座)。
- 配置机械臂的基本参数,如:
- 连杆长度
- 关节限位
- 质量和惯性矩
- 在属性面板中,设置每个关节的控制参数,如PID控制器的增益值。
3. 在Simulink中创建控制模型
3.1 创建新的Simulink模型
- 打开MATLAB,启动Simulink并创建一个新的空白模型。
- 保存模型文件,命名为
UR5e_Control.slx。
3.2 添加和配置通信模块
- 在Simulink库浏览器中,找到并添加“TCP/IP Send”模块和“TCP/IP Receive”模块。
- 配置这些模块的参数:
- 设置IP地址为本地(127.0.0.1)。
- 设置端口号(例如19997,确保与CoppeliaSim中的端口号匹配)。
- 配置数据类型和大小(例如,浮点数数组)。
3.3 设计控制算法
- 在Simulink模型中,添加并连接以下模块以设计控制算法:
- 常量模块(用于设置目标位置和姿态)
- 传感器模块(用于接收当前关节位置和速度)
- PID控制器模块(用于计算控制输入)
- Mux和Demux模块(用于数据整合和分解)
- 设计一个简单的PD控制器,确保控制器能够接收目标关节位置和当前关节位置,并输出控制输入。
4. 建立CoppeliaSim和Simulink之间的通信
4.1 使用远程API
- 在CoppeliaSim安装目录中找到并打开
remoteApiCommandServer.bat脚本,以启动远程API服务器。 - 在MATLAB中编写一个脚本,用于初始化远程API连接:
matlab
复制代码
sim=remApi('remoteApi'); clientID=sim.simxStart('127.0.0.1',19997,true,true,5000,5); if clientID > -1 disp('Connected to CoppeliaSim'); else disp('Failed to connect to CoppeliaSim'); end
4.2 设置TCP/IP通信
- 在CoppeliaSim中,编写一个Lua脚本以设置TCP/IP服务器:
lua
复制代码
if (sim_call_type==sim_childscriptcall_initialization) then tcpServer=sim.tcpip.server(19997) end if (sim_call_type==sim_childscriptcall_actuation) then if sim.tcpip.accept(tcpServer) then data=sim.tcpip.receive(tcpServer) -- 处理接收到的数据 end end
- 确保Lua脚本正确加载并运行。
5. 实现实时控制
5.1 配置实时控制参数
- 在Simulink模型中,配置仿真参数以实现实时控制:
- 设置“仿真模式”为“外部”。
- 配置固定步长仿真时间步长(例如0.01秒)。
- 确保控制算法能够在实时仿真中实时运行。
5.2 测试和验证控制算法
- 启动CoppeliaSim场景,确保机械臂模型正确加载。
- 启动Simulink仿真,确保通信模块正常工作,控制算法能够发送和接收数据。
- 验证机械臂在Simulink控制算法下的行为,确保其按照预期移动和操作。
6. 调试和优化
6.1 常见问题和解决方案
连接失败
- 确保CoppeliaSim和Simulink中的端口号匹配。
- 确保防火墙允许CoppeliaSim和Simulink的通信。
数据丢失或延迟
- 优化通信模块的配置,确保数据传输的实时性和可靠性。
- 增加错误处理机制,确保在数据丢失或延迟时能够及时恢复。
控制不稳定
- 调整控制算法的参数,如PID增益值,确保控制系统的稳定性。
- 增加滤波器模块,减少传感器噪声对控制算法的影响。
6.2 性能优化
- 优化CoppeliaSim场景中的模型和脚本,减少不必要的计算开销。
- 优化Simulink模型中的控制算法,确保其能够在实时仿真中高效运行。
- 使用MATLAB的性能分析工具,识别并优化性能瓶颈。
Simulink联合【CoppeliaSim】(原Vrep)进行车和臂的仿真控制_simulink vrep-CSDN博客文章浏览阅读1.6k次。库位置在Simulink中的使用1.建立连接拖入就直接可以使用 不需要更改参数2.臂的正运动学控制句柄名称填写运行Simulink仿真之前 需要先打开CoppeliaSim软件并打开仿真模型,将模型中的脚本禁用禁用脚本:关节的具体设置:仿真步长的设置:两个软件的步长一定要设置成一样的simulink中:CoppeliaSim中:Run:3.车的控制句柄名称填写四个模块依次填写就好后面步骤和臂一样,不在赘述Run:_simulink vrephttps://blog.csdn.net/weixin_47370211/article/details/122558206?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522171870125316800182765789%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=171870125316800182765789&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduend~default-2-122558206-null-null.142%5Ev100%5Epc_search_result_base8&utm_term=CoppeliaSim%20simulink&spm=1018.2226.3001.4187GitCode - 全球开发者的开源社区,开源代码托管平台GitCode是面向全球开发者的开源社区,包括原创博客,开源代码托管,代码协作,项目管理等。与开发者社区互动,提升您的研发效率和质量。
![]() https://gitcode.com/santdiego/simExtSimulink/overview?utm_source=csdn_github_accelerator&isLogin=1
https://gitcode.com/santdiego/simExtSimulink/overview?utm_source=csdn_github_accelerator&isLogin=1
利用V-REP CoppeliaSim和Matlab实现机器人轨迹控制仿真,绘制墙壁上的图案,附带详细代码和学习指导_vrep simulink机器人仿真-CSDN博客文章浏览阅读373次,点赞3次,收藏6次。在V-REP Coppeliasim中,我们可以选择合适的机器人模型,并使用V-REP的建模工具创建一个轨迹。V-REP Coppeliasim 是一种功能强大的机器人仿真平台,而MATLAB作为一种流行的数值计算和仿真工具,也被广泛应用于机器人控制领域。首先,我们需要使用MATLAB的V-REP接口连接到V-REP Coppeliasim,并加载机器人模型。vrep/coppeliasim+matlab,机器人轨迹控制仿真,利用matlab读取轨迹并控制机械臂在墙上绘图,里面有轨迹规划的相关算法。_vrep simulink机器人仿真https://blog.csdn.net/IjdfVngeYXOa/article/details/139225803?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522171870137816800225590511%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=171870137816800225590511&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduend~default-1-139225803-null-null.142%5Ev100%5Epc_search_result_base8&utm_term=CoppeliaSim%20MATLAB&spm=1018.2226.3001.4187https://www.cnblogs.com/youngsea/p/7355554.html
![]() https://www.cnblogs.com/youngsea/p/7355554.html
https://www.cnblogs.com/youngsea/p/7355554.html
Simulink与VREP联合仿真_simulinktable.getdata用法-CSDN博客文章浏览阅读3.5k次,点赞9次,收藏40次。软件:ppeliaSim Edu 4.0.0 (VREP的升级版本)具有集成开发环境的机器人模拟器CoppeliaSim基于分布式控制体系结构:每个对象/模型都可以通过嵌入式脚本,插件,ROS或BlueZero节点,远程API客户端或自定义解决方案进行单独控制。这使CoppeliaSim非常通用,非常适合多机器人应用。控制器可以用C / C ++,Python,Java,Lua,Matlab或Octave编写[1]。为了保证能够成功,请尽量选择CoppeliaSim 4.0版本以上;并且尽量选择较高版本_simulinktable.getdata用法https://blog.csdn.net/qq_43447210/article/details/115338965
相关文章:
机械臂 CoppeliaSim Simulink联合仿真
实现机械臂在CoppeliaSim(以前称为V-REP)和Simulink上的联合仿真涉及多个步骤,包括环境设置、模型导入、通信配置、控制算法设计和测试调试。 前期准备 安装软件配置工作环境创建和配置CoppeliaSim场景 导入机械臂模型配置机械臂参数在Simuli…...
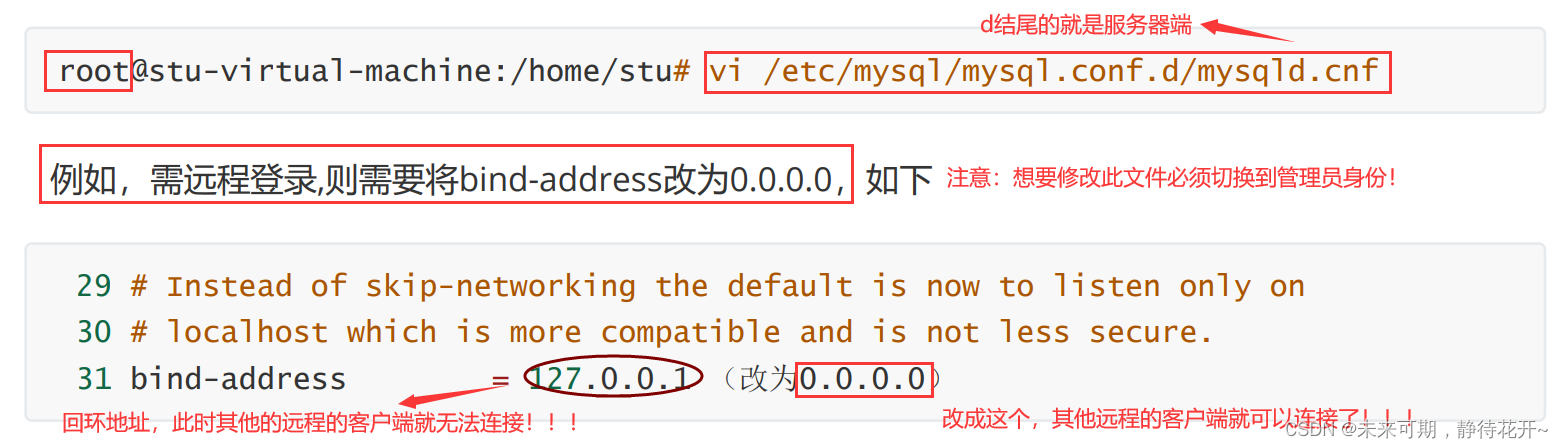
MySQL数据库(一):数据库介绍与安装
在嵌入式开发中,数据库的重要性体现在高效的数据存储和管理、数据持久化、复杂查询和处理、数据同步和共享、安全性和可扩展性。常见嵌入式数据库包括SQLite、MySQL、LevelDB等,应用于智能家居、工业控制、车载系统和物联网设备,提升了系统功…...

天津媒体邀约,及媒体名单?
传媒如春雨,润物细无声,大家好,我是51媒体网胡老师。 媒体宣传加速季,100万补贴享不停,一手媒体资源,全国100城线下落地执行。详情请联系胡老师。 天津作为中国北方的重要城市,拥有丰富的媒体资…...

Java | Leetcode Java题解之第168题Excel表列名称
题目: 题解: class Solution {public String convertToTitle(int columnNumber) {StringBuffer sb new StringBuffer();while (columnNumber ! 0) {columnNumber--;sb.append((char)(columnNumber % 26 A));columnNumber / 26;}return sb.reverse().t…...

代码随想录算法训练营刷题复习10:二叉树、二叉搜索树复习2
二叉树、二叉搜索树 力扣题复习 110. 平衡二叉树257. 二叉树的所有路径404. 左叶子之和513. 找树左下角的值112.路径之和113.路经总和ii450. 删除二叉搜索树中的节点701. 二叉搜索树中的插入操作 110. 平衡二叉树 左右子树高度差要小于1 ->递归调用(need新的函…...
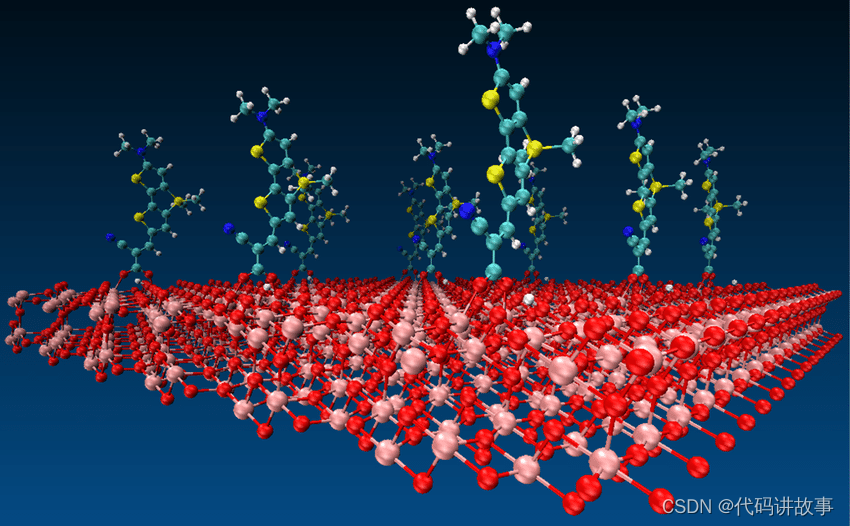
预测准确率达95.7%,ChatMOF利用LLM预测和生成金属有机框架,包含人工智能词汇表(AI glossary)
预测准确率达95.7%,ChatMOF利用LLM预测和生成金属有机框架,包含人工智能词汇表(AI glossary)。 金属有机框架(MOF)因其孔隙率大、表面积大和出色的可调性而用于许多化学应用。然而,在利用 AI 深入探索 MOF 设计与性能优化的研究征途中,科学家们正面临着前所未有的挑战。…...

【Linux】环境基础开发工具使用(yum、vim、gcc/g++、gdb、make/Makefile)
文章目录 Linux 软件包管理器 yumLinux开发工具Linux编辑器-vim使用vim的基本概念vim下各模式的切换vim命令模式各命令汇总vim底行模式各命令汇总批量化注释和批量化去注释vim简单的配置解决一个小问题 Linux编译器-gcc/g作用gcc/g 语法预处理编译汇编链接什么是函数库 Linux调…...

Linux基础二
目录 一,tail查看文件尾部指令 二,date显示日期指令 三,cal查看日历指令 四,find搜索指令 五,grep 查找指令 六,> 和>> 重定向输出指令 七, | 管道指令 八,&&逻辑控…...

Linux运维面试--yum安装和编译安装区别
风吹哪页读哪页,花开何时看何时。 目录 # 1.安装方式差异 ## 1.1 yum安装 ## 1.2 源码编译安装 # 2.优缺点分析 ## 2.1 yum安装优缺点 ### 2.1.1 yum安装优点 ### 2.1.2 yum安装缺点 ## 2.2 源码安装优缺点 ### 2.2.1 源码安装优点 ### 2.2.2 源码安装缺点…...

redis 的内存尽量不要超过 10g,超过 10g 可能会有问题
在使用Redis时,内存大小的限制通常取决于多种因素,包括但不限于: 1. **物理内存**:服务器的总内存大小限制了Redis可以使用的最大内存。 2. **操作系统限制**:操作系统可能对单个进程可以使用的内存有限制。 3. **Red…...
)
力扣(2024.06.23)
1. 62——不同路径 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。 机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。问总共有多少条不同的路径&a…...

OpenCV颜色检测
OpenCV颜色检测 前言策略分析根据颜色检测目标对象相关链接 前言 绿幕技术是一种经典的视频编辑技术,可以用于将人物置于不同的背景中。例如在电影制作中,技术的关键在于演员不能身着特定颜色的衣服(比如绿色),站在只有绿色的背景前。然后&a…...
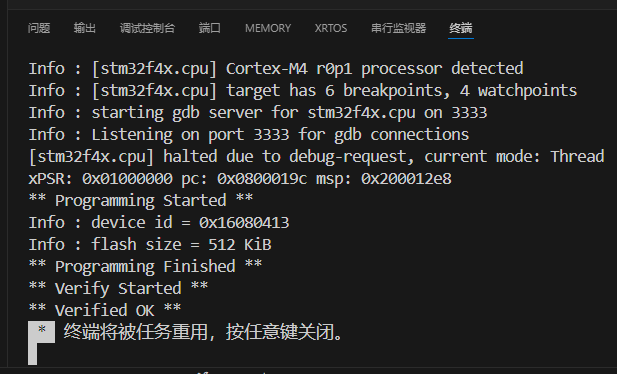
VScode开发ARM环境搭建
1. vscode安装 直接访问官网: Visual Studio Code - Code Editing. Redefined 2. 安装插件 2.1. 安装Embedded IDE 2.2. 安装Cortex-debug 3. 工程初始化 3.1. 导入现有工程(推荐) 3.2. 或可创建新的工程 3.2.1. 选择Cortex-M项目 指定项目名称&…...
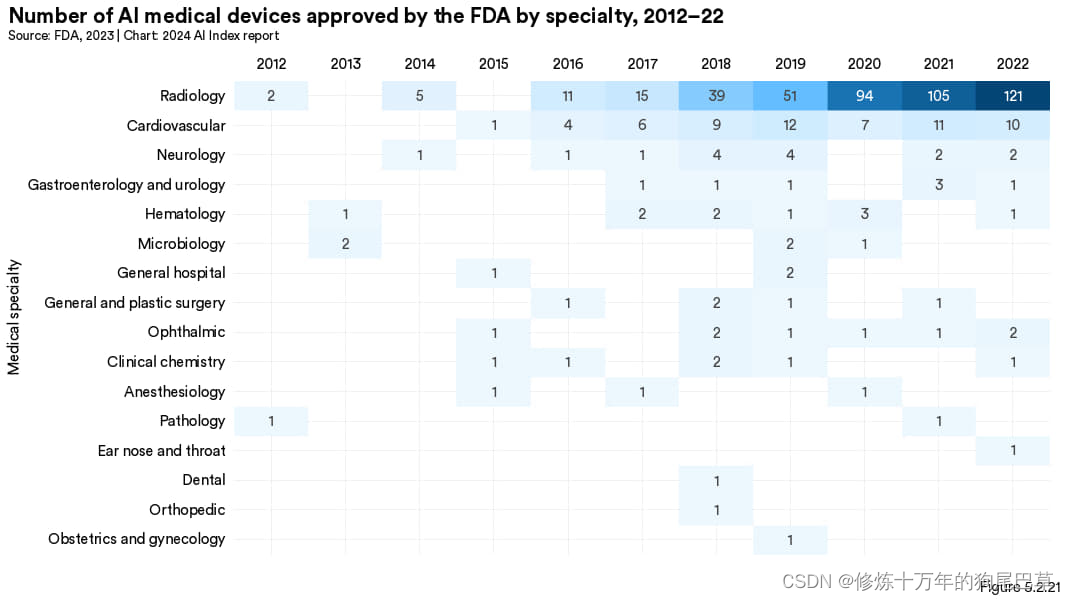
AI-人工智能指数报告(四):科学、医学与教育
背景: 从2017年开始,斯坦福大学人工智能研究所(HAI)每年都会发布一份人工智能的研究报告,人工智能指数报告(AII),对上一年人工智能相关的数据进行跟踪、整理、提炼并进行可视化。这份…...

Redis内存数据库
Redis是一个开源的内存数据库,它可以用作缓存、数据库和消息中间件。Redis支持多种数据结构,包括字符串、哈希表、列表、集合、有序集合等,这使得它非常灵活且适用于多种用途。 以下是关于Redis的一些重要特点和功能: 内存存储&a…...
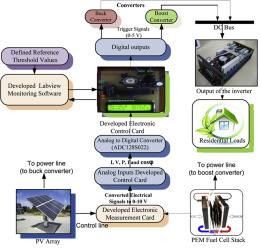
LabVIEW高精度电能质量监测系统
LabVIEW和研华采集卡的高精度电能质量监测系统利用虚拟仪器技术,实时监测电能质量的关键指标,如三相电压、频率和谐波。通过提高监测精度和效率,改善电网的电能质量。系 一、系统背景 电能作为现代社会的关键能源,其质量直接影响…...
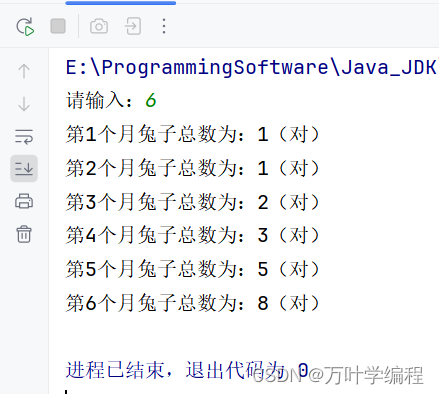
Java程序之可爱的小兔兔
题目: 古典问题,有一对兔子,从出生后第3个月起每个月都生一对兔子,小兔子长到第三个月后每个月又生一对兔子,假如兔子都不死,问每个月的兔子总数为多少? 程序分析: 兔子的规律为数列1,1,2,3,…...
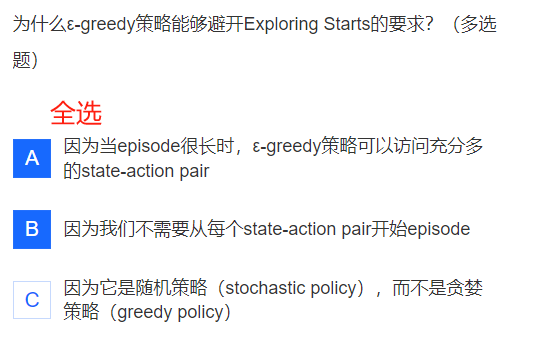
▶《强化学习的数学原理》(2024春)_西湖大学赵世钰 Ch5 蒙特卡洛方法【model-based ——> model-free】
PPT 截取必要信息。 课程网站做习题。总体 MOOC 过一遍 1、视频 学堂在线 习题 2、 过 电子书 是否遗漏 【下载:本章 PDF GitHub 页面链接 】 【第二轮 才整理的,忘光了。。。又看了一遍视频】 3、 过 MOOC 习题 看 PDF 迷迷糊糊, 恍恍惚惚。…...
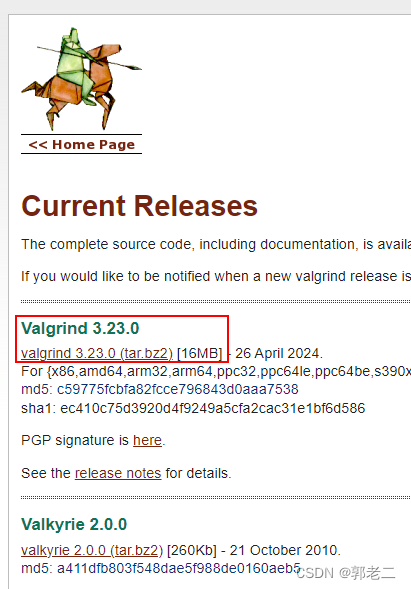
【linux】Valgrind工具集详解(十六):交叉编译、移植到arm(失败)
1、源码下载 官网:https://valgrind.org/ 源码:https://valgrind.org/downloads/current.html 2、配置 ./configure CC=arm-linux-gnueabihf-gcc \CXX=arm-linux-gnueabihf-g++ \AR=arm-linux-gnueabihf-ar \--host=arm-linux-gnueabihf \--pr...
答案版)
前端面试题(七)答案版
面试形式:线下面试:时长20分钟 特殊要求:996加班30k上限 面试评价:技术题 面试官:前端技术人员 面试官的提问大纲:本公司招聘要求本人简历 面试流程以及面试题: 第一个环节:自…...

在nodejs后端服务中集成taotoken多模型调用能力
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在Node.js后端服务中集成Taotoken多模型调用能力 1. 项目初始化与环境配置 在开始集成之前,你需要一个已经存在的Node…...

智能卡通信调优实战:手把手教你用逻辑分析仪抓取并解析ISO7816 PPS协商过程
智能卡通信调优实战:手把手教你用逻辑分析仪抓取并解析ISO7816 PPS协商过程 在嵌入式系统和智能卡应用开发中,通信稳定性往往是项目成败的关键。当你的智能卡设备频繁出现通信中断、数据丢失或速率不达标时,问题很可能隐藏在协议协商阶段。IS…...

5分钟掌握英雄联盟国服换肤:R3nzSkin完整解决方案
5分钟掌握英雄联盟国服换肤:R3nzSkin完整解决方案 【免费下载链接】R3nzSkin-For-China-Server Skin changer for League of Legends (LOL) 项目地址: https://gitcode.com/gh_mirrors/r3/R3nzSkin-For-China-Server 你是否曾在游戏中羡慕别人的稀有皮肤&…...

SyncedStore深度解析:揭秘CRDT技术如何实现无冲突数据同步
SyncedStore深度解析:揭秘CRDT技术如何实现无冲突数据同步 【免费下载链接】SyncedStore SyncedStore CRDT is an easy-to-use library for building live, collaborative applications that sync automatically. 项目地址: https://gitcode.com/gh_mirrors/sy/Sy…...

openpilot自动驾驶系统终极指南:从入门到实战的完整教程
openpilot自动驾驶系统终极指南:从入门到实战的完整教程 【免费下载链接】openpilot openpilot is an operating system for robotics. Currently, it upgrades the driver assistance system on 300 supported cars. 项目地址: https://gitcode.com/GitHub_Trend…...

告别环境配置焦虑:用Intel oneAPI和OpenMPI在CentOS7搭建你的第一个并行计算Demo
告别环境配置焦虑:用Intel oneAPI和OpenMPI在CentOS7搭建你的第一个并行计算Demo 高性能计算(HPC)的世界常常让人望而生畏——复杂的工具链、晦涩的术语、漫长的环境配置过程。但今天,我们将打破这一认知。只需一台CentOS7服务器…...

iOS 17-26越狱终极指南:5个安全解锁iPhone隐藏功能的专业方法
iOS 17-26越狱终极指南:5个安全解锁iPhone隐藏功能的专业方法 【免费下载链接】Jailbreak iOS 26.4 - 26, 17 - 17.7.5 & iOS 18 - 18.7.3 Jailbreak Tools, Cydia/Sileo/Zebra Tweaks & Jailbreak News Updates || AI Jailbreak Finder 👇 项…...

极简黑魔法:用 gh gist 搭建我们的私有配置分发 CDN
在多端协作的时代,我们经常需要在 PC、手机和路由器之间同步一些私密的订阅配置(如应用服务配置文件,凭据等)。 如果使用公共 Gist 会有隐私泄露风险;维护一个私有 Git 仓库又需要处理复杂的 API Token 鉴权࿰…...

终极免费文档下载指南:kill-doc让你轻松保存百度文库等30+平台内容
终极免费文档下载指南:kill-doc让你轻松保存百度文库等30平台内容 【免费下载链接】kill-doc 看到经常有小伙伴们需要下载一些免费文档,但是相关网站浏览体验不好各种广告,各种登录验证,需要很多步骤才能下载文档,该脚…...

明日方舟MAA助手:如何用5分钟自动化你的每日游戏任务
明日方舟MAA助手:如何用5分钟自动化你的每日游戏任务 【免费下载链接】MaaAssistantArknights 《明日方舟》小助手,全日常一键长草!| A one-click tool for the daily tasks of Arknights, supporting all clients. 项目地址: https://gitc…...