Ubuntu 18.04 安装 PCL 1.14.1
在进行科研项目时,我们常常需要将 C++ 和 Python 结合起来编程。然而,每次将 PCL(Point Cloud Library)的内容添加到 CMakeLists.txt 文件中时都会报错。在深入分析后,我们推测可能是当前使用的 PCL 1.8 版本与现有程序不兼容。因此,我们决定尝试安装最新的 PCL 1.14.1 版本,以期望解决这些兼容性问题。
1. 卸载旧版本的 PCL:
首先,我们需要卸载系统中现有的 PCL 1.8 版本,以避免与新版本产生冲突。
sudo apt-get remove libpcl-dev2. 安装依赖
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev
sudo apt-get install cmake cmake-gui
sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install libflann1.9 libflann-dev #这里改成1.9
sudo apt-get install libeigen3-dev
sudo apt-get install libboost-all-dev
sudo apt-get install libvtk7.1-qt libvtk7.1 libvtk7-qt-dev # 这里用7.1 不要用8以上的
sudo apt-get install libqhull* libgtest-dev
sudo apt-get install freeglut3-dev pkg-config
sudo apt-get install libxmu-dev libxi-dev
sudo apt-get install mono-complete
sudo apt-get install openjdk-8-jdk openjdk-8-jre# 安装OpenNI,OpenNI2
sudo apt-get install libopenni-dev
sudo apt-get install libopenni2-dev# 安装QT5:
sudo apt install qtcreator
sudo apt install qt5-default# 安装metslib
wget https://www.coin-or.org/download/source/metslib/metslib-0.5.3.tgz
tar xzvf metslib-0.5.3.tgz
cd metslib-0.5.3
./configure
make -j`nproc`
sudo make install中间提示选择Y/N的全部选Y
3.下载最新版本的PCL库并编译
git clone https://github.com/PointCloudLibrary/pcl.git 或者git clone https://gitee.com/mirrors/pcl.git如果需要指定版本,请你点击下面连接进行下载。
Releases · PointCloudLibrary/pcl · GitHubPoint Cloud Library (PCL). Contribute to PointCloudLibrary/pcl development by creating an account on GitHub.![]() https://github.com/PointCloudLibrary/pcl/releases例如:
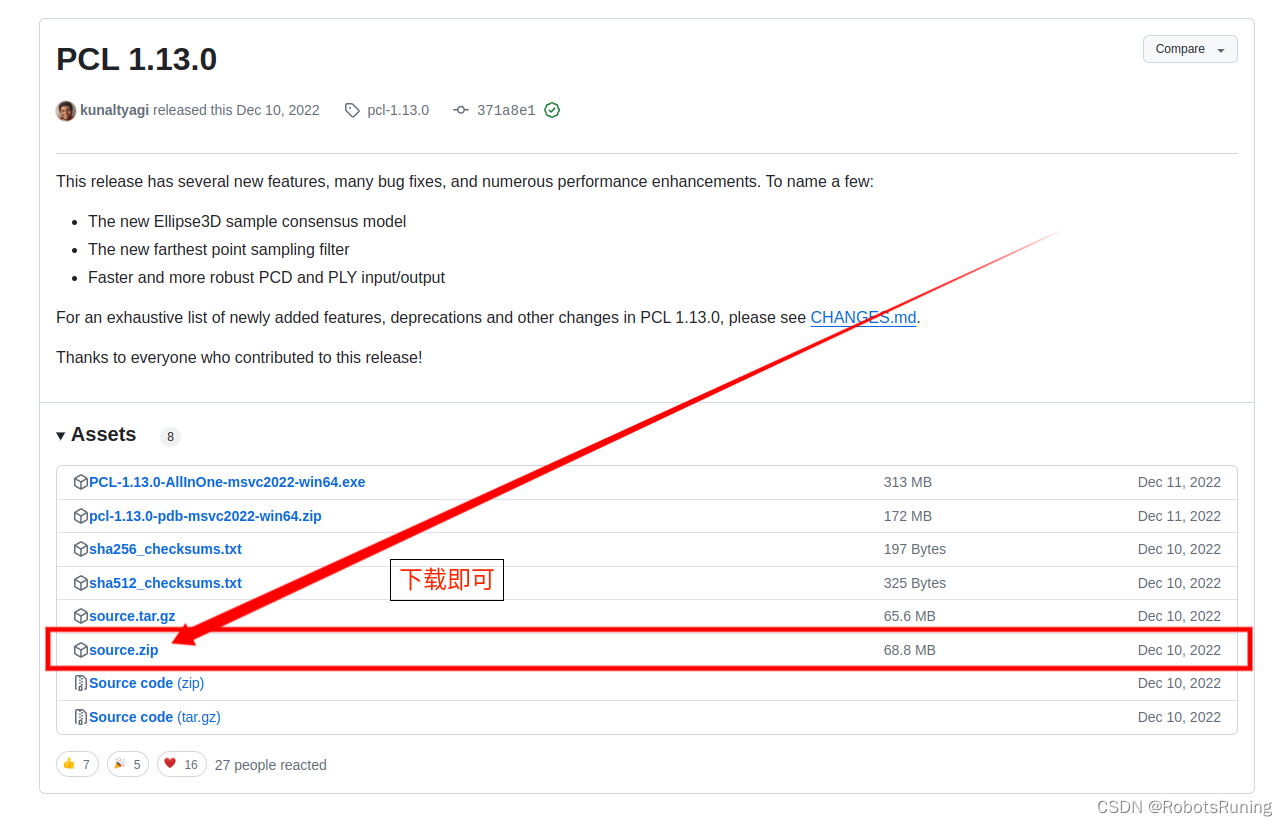
https://github.com/PointCloudLibrary/pcl/releases例如:
选择source.zip
解压进入 pcl 文件夹:
cd pcl
# 切换到指定版本v1.14.1再编译
# git checkout pcl-1.14.1 # 也可以不要这一行命令,直接安装最新的版本
# 创建目录并进入目录
mkdir build && cd build#安装在系统目录
cmake .. \-DCMAKE_BUILD_TYPE=None \-DCMAKE_INSTALL_PREFIX=/usr/local \-DCMAKE_PREFIX_PATH=/usr/lib/x86_64-linux-gnu \-DFREETYPE_LIBRARY=/usr/lib/x86_64-linux-gnu/libfreetype.so \-DBUILD_GPU=ON \-DBUILD_apps=ON \-DBUILD_simulation=ON \-DBUILD_examples=ON#也可以安装在自己指定的目录,如下所示(主要是改下安装空间):
cmake .. \-DCMAKE_BUILD_TYPE=None \-DCMAKE_INSTALL_PREFIX=~/Programs/lib/PCL1141 \-DCMAKE_PREFIX_PATH=/usr/lib/x86_64-linux-gnu \-DFREETYPE_LIBRARY=/usr/lib/x86_64-linux-gnu/libfreetype.so \-DBUILD_GPU=ON \-DBUILD_apps=ON \-DBUILD_simulation=ON \-DBUILD_examples=ON# Orin 切换到 MAXN POWER MODE
# 进行编译
make -j`nproc`#编译完后,执行安装
sudo make installmake -j`nproc`成功界面
sudo make install 成功界面
问题1:
/usr/bin/ld: warning: //home/fairlee/anaconda3/lib/libicudata.so.73: unsupported GNU_PROPERTY_TYPE (5) type: 0xc0010001
/usr/bin/ld: warning: //home/fairlee/anaconda3/lib/libicudata.so.73: unsupported GNU_PROPERTY_TYPE (5) type: 0xc0010002
//home/fairlee/anaconda3/lib/libfontconfig.so.1: undefined reference to `FT_Done_MM_Var'
collect2: error: ld returned 1 exit status
tools/CMakeFiles/pcl_pcd_grabber_viewer.dir/build.make:170: recipe for target 'bin/pcl_pcd_grabber_viewer' failed
make[2]: *** [bin/pcl_pcd_grabber_viewer] Error 1
CMakeFiles/Makefile2:3197: recipe for target 'tools/CMakeFiles/pcl_pcd_grabber_viewer.dir/all' failed
make[1]: *** [tools/CMakeFiles/pcl_pcd_grabber_viewer.dir/all] Error 2
make[1]: *** Waiting for unfinished jobs....
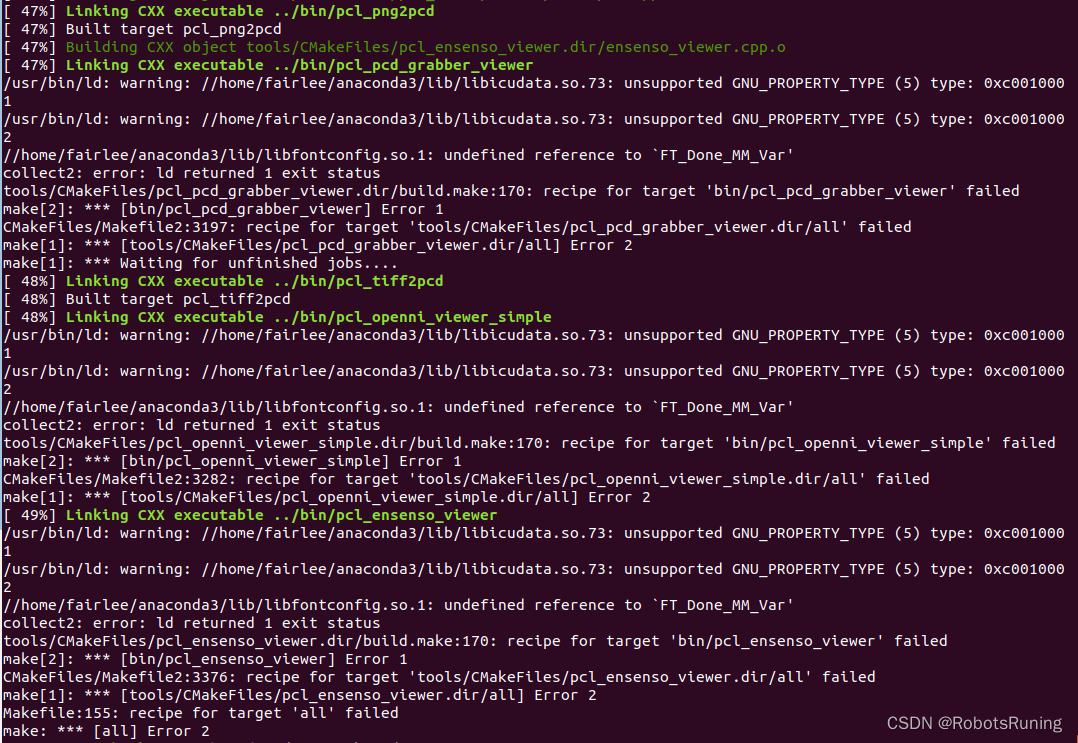
解决方案:
这个错误可能是由于系统中存在多个版本的库,而编译器使用了不兼容的版本。在这种情况下,Anaconda环境中的库可能与系统库冲突。因此,完全移除Anaconda的影响: 临时重命名你的Anaconda目录,以确保系统不会使用任何Anaconda的库:
最后安装成功后,别忘了把文件名改回去!!!!!!!!!
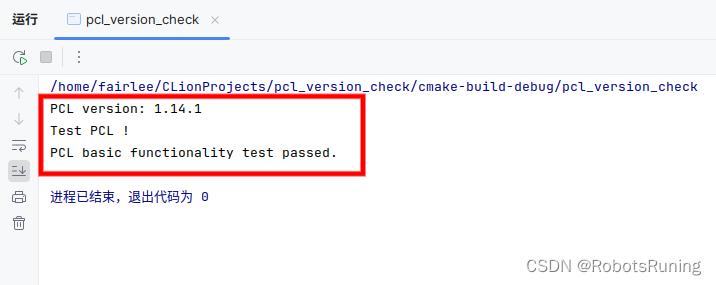
4. 安装验证
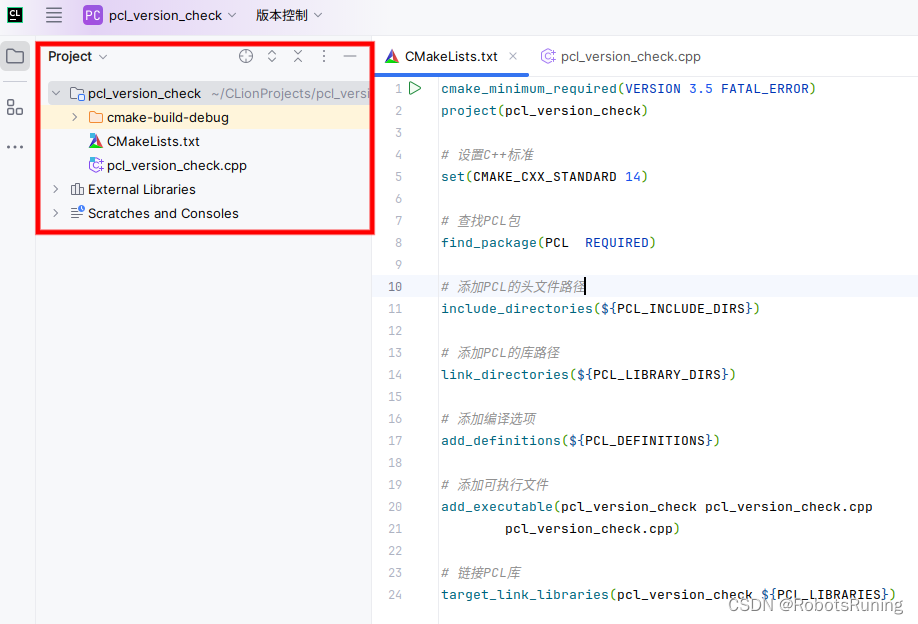
CMakeLists.txt
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)
project(pcl_version_check)# 设置C++标准
set(CMAKE_CXX_STANDARD 14)# 查找PCL包
find_package(PCL REQUIRED)# 添加PCL的头文件路径
include_directories(${PCL_INCLUDE_DIRS})# 添加PCL的库路径
link_directories(${PCL_LIBRARY_DIRS})# 添加编译选项
add_definitions(${PCL_DEFINITIONS})# 添加可执行文件
add_executable(pcl_version_check pcl_version_check.cpppcl_version_check.cpp)# 链接PCL库
target_link_libraries(pcl_version_check ${PCL_LIBRARIES})pcl_version_check.cpp
#include <iostream>
#include <pcl/pcl_config.h>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <iostream>
#include <pcl/common/common_headers.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/cloud_viewer.h>
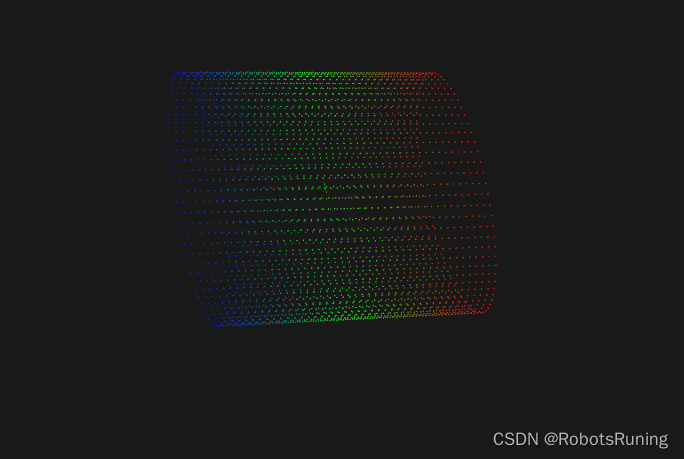
#include <pcl/console/parse.h>int main() {std::cout << "PCL version: " << PCL_VERSION_PRETTY << std::endl;// 创建一个简单的点云对象来测试基本功能pcl::PointCloud<pcl::PointXYZ> cloud;std::cout << "Test PCL !" << std::endl;pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr (new pcl::PointCloud<pcl::PointXYZRGB>);uint8_t r(255), g(15), b(15);for (float z(-1.0); z <= 1.0; z += 0.05) {for (float angle(0.0); angle <= 360.0; angle += 5.0) {pcl::PointXYZRGB point;point.x = 0.5 * cosf (pcl::deg2rad(angle));point.y = sinf (pcl::deg2rad(angle));point.z = z;uint32_t rgb = (static_cast<uint32_t>(r) << 16 | static_cast<uint32_t>(g) << 8 | static_cast<uint32_t>(b));point.rgb = *reinterpret_cast<float*>(&rgb);point_cloud_ptr->points.push_back (point);}if (z < 0.0) {r -= 12;g += 12;}else {g -= 12;b += 12;}}point_cloud_ptr->width = (int) point_cloud_ptr->points.size ();point_cloud_ptr->height = 1;pcl::visualization::CloudViewer viewer ("test");viewer.showCloud(point_cloud_ptr);while (!viewer.wasStopped()){ };// 如果代码执行到这里没有错误,说明PCL基本功能正常std::cout << "PCL basic functionality test passed." << std::endl;return 0;
}结果
致谢
ubuntu 18.04 安装PCL 1.12.1_the following subsystems will not be built:-- visu-CSDN博客
相关文章:
Ubuntu 18.04 安装 PCL 1.14.1
在进行科研项目时,我们常常需要将 C 和 Python 结合起来编程。然而,每次将 PCL(Point Cloud Library)的内容添加到 CMakeLists.txt 文件中时都会报错。在深入分析后,我们推测可能是当前使用的 PCL 1.8 版本与现有程序不…...
公司logo设计大全怎么找?直接帮你设计logo
公司logo设计大全怎么找?在品牌塑造的过程中,Logo无疑是至关重要的一环。一个优秀的Logo不仅能够有效传达公司的核心理念和品牌形象,还能在消费者心中留下深刻的印象。然而,对于许多初创公司或小型企业来说,制作出适合…...

如何调整C#中数组的大小
前言 数组存储多个相同类型的一种非常常用的数据结构。它长度是固定,也就是数组一旦创建大小就固定了。C# 数组不支持动态长度。那在C#中是否有方法可以调整数组大小呢?本文将通过示例介绍一种调整一维数组大小的方法。 方法 数组实例是从 System.Arr…...

通过言语和非言语检索线索描绘睡眠中的记忆再激活茗创科技茗创科技
摘要 睡眠通过重新激活新形成的记忆痕迹来巩固记忆。研究睡眠中记忆再激活的一种方法是让睡眠中的大脑再次暴露于听觉检索线索(定向记忆再激活范式)。然而,记忆线索的声学特性在多大程度上影响定向记忆再激活的有效性,目前还没有得到充分探索。本研究通…...

MDPI旗下SSCI最新影响因子目录出炉!“水刊“Sustainability表现如何?
本周投稿推荐 SSCI • 1区,4.0-5.0(无需返修,提交可录) EI • 各领域沾边均可(2天录用) CNKI • 7天录用-检索(急录友好) SCI&EI • 4区生物医学类,0.1-0.5&…...

Matlab基础篇:数据输入输出
前言 数据输入和输出是 Matlab 数据分析和处理的核心部分。良好的数据输入输出能够提高工作效率,并确保数据处理的准确性。本文将详细介绍 Matlab 数据输入输出的各种方法,包括导入和导出数据、数据处理和数据可视化。 一、导入数据 Matlab 提供了多种方…...
MySQL字典数据库设计与实现 ---项目实战
软件准备✍:Mysql与Navicat可视化命令大全 ----项目实战 文章前言部分 目录 一.摘要 二.设计内容 三.项目实现 一.摘要 本项目关注于字典数据库表结构的设计和数据管理。通过现有的sql文件,实现system_dict_type和system_dict_data两个数据表。随后…...
python数据分析——数据预处理
数据预处理 前言一、查看数据数据表的基本信息查看info()示例 查看数据表的大小shape()示例 数据格式的查看type()dtype()dtypes()示例一示例二 查看具体的数据分布describe()示例 二…...
【Python】使用matplotlib绘制图形(曲线图、条形图、饼图等)
文章目录 一、什么是matplotlib二、matplotlib 支持的图形三、如何使用matplotlib1. 安装matplotlib2. 导入matplotlib.pyplot3. 准备数据4. 绘制图形5. 定制图形6. 显示或保存图形7. (可选)使用subplots创建多个子图注意事项: 四、常见图形使…...

vue下载本地xls模版静态文件
需求导入的下载模版不想放在服务器放在前端本地下载静态资源最简单的方式直接访问 public 文件夹下的文件 方法一:使用静态文件路径 将文件放在 public 文件夹中: 把你的文件从 src/assets 移动到 public 文件夹。例如:public/template.xls。…...

手机开热点,里面的WPA2-Personal和WPA3-Personal的区别
WPA2-Personal和WPA3-Personal这两种协议都是用来保护无线网络安全的,但它们在加密强度和安全性方面有所不同。 WPA2-Personal (Wi-Fi Protected Access 2) WPA2是目前最广泛使用的Wi-Fi安全标准之一。它使用AES(Advanced Encryption Standard…...
算法课程笔记——点积叉积
算法课程笔记——点积叉积...
详解 | DigiCert EV代码签名证书
简介 DigiCert EV 代码签名证书是一种高级别的代码签名证书,它不仅提供了标准代码签名证书的所有安全特性,还增加了额外的身份验证流程,以确保软件开发者或发布者的身份得到最严格验证。这对于提升软件的信任度、防止恶意篡改和确保下载安全…...

pdf压缩大小,PDF压缩大小不影响清晰度
你是否曾为PDF文件过大而烦恼?想要分享或上传文件时,却因为它的体积而束手无策?别担心,今天我将为大家分享一些简单实用的 PDF 压缩技巧,让你的文件轻松压缩pdf。 打开“轻云处理pdf官网”, 的网站。然后上…...
项目管理必备工具:2024年十大软件排行榜
有效的工具不仅可以帮助团队保持组织性,还能显著提高项目完成率。选择合适的项目管理软件,对于实现这些目标至关重要。 在2024年的各大权威榜单中,排名前十的项目管理软件包括:PingCode、Worktile(国内)&am…...

SOLIDWORKS专业版2024价格
SOLIDWORKS Professional 专业版,带有 ECAD/MCAD 协作、自动成本估算、协作功能、设计和工程图检查、复杂的零部件库以及高级真实感渲染。 1. ECAD/MCAD协作:SOLIDWORKS专业版提供了强大的ECAD/MCAD协作功能,使得设计团队可以更高效地进行跨…...
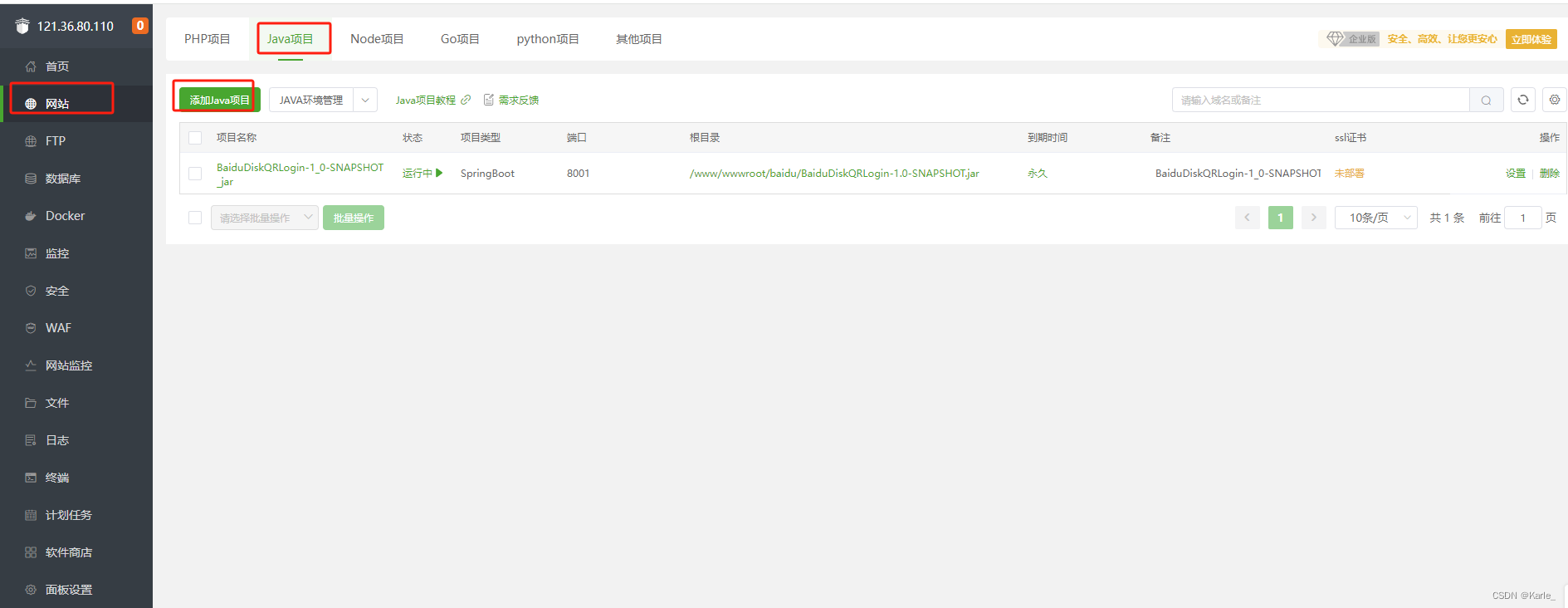
【外快业务】百度网盘扫码源码系统部署过程记录。
视频地址:【【自动发货项目】电脑PC/移动端扫码登录百度网盘项目源码,支持多人组团购买源码】 https://www.bilibili.com/video/BV1oD421W7oj/?share_sourcecopy_web&vd_source74cf265c4965f8c17f8e89bd8c29408d 1.远程连接服务器执行,…...
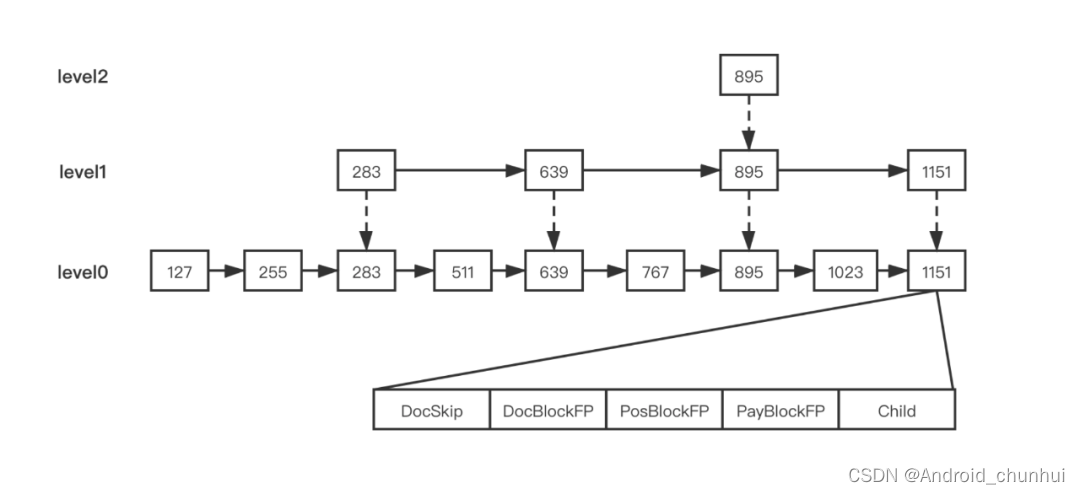
lucene原理
一、正排索引 Lucene的基础层次结构由索引、段、文档、域、词五个部分组成。正向索引的生成即为基于Lucene的基础层次结构一级一级处理文档并分解域存储词的过程。 索引文件层级关系如图1所示: 索引:Lucene索引库包含了搜索文本的所有内容࿰…...

华为、H3C交换机常用巡检命令
一、硬件状态、IOS版本信息检查 • display clock:显示系统时间。 • display version:查看交换机的版本信息和最近一次重新启动的时间。 • display enviroment:显示设备温度。 • display device:显示单板运行状态。 • di…...
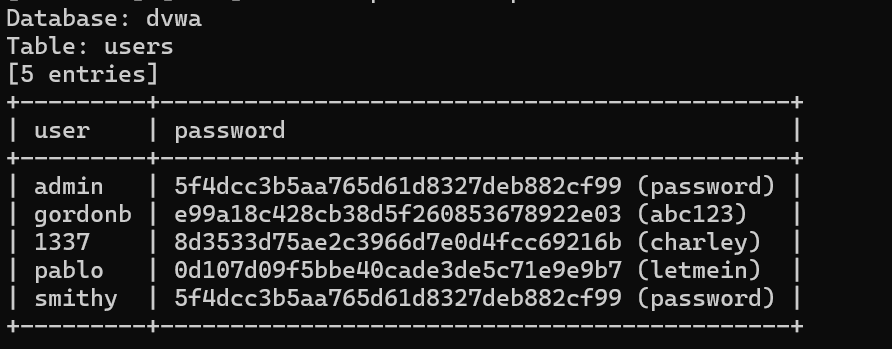
网络安全 DVWA通关指南 SQL Injection(SQL注入)
DVWA SQL Injection 文章目录 DVWA SQL InjectionLowMediumHighImpossible SQL注入漏洞基本原理 Web应用程序对用户输入的数据校验处理不严或者根本没有校验,致使用户可以拼接执行SQL命令。 可能导致数据泄露或数据破坏,缺乏可审计性,甚至导致…...

终极指南:使用XNBCLI高效解包打包星露谷物语XNB游戏资源文件
终极指南:使用XNBCLI高效解包打包星露谷物语XNB游戏资源文件 【免费下载链接】xnbcli A CLI tool for XNB packing/unpacking purpose built for Stardew Valley. 项目地址: https://gitcode.com/gh_mirrors/xn/xnbcli XNB文件是星露谷物语等XNA游戏引擎使用…...
)
微软 Qlib 实战:从零构建跑赢大盘的 AI 智能选股策略(附最新回测与全流程代码)
在 GitHub 的量化投资社区中,微软亚洲研究院开源的 Qlib 毫无疑问是王者级别的存在(13k Stars)。传统的量化策略通常依赖主观经验设定的指标(如:均线突破、MACD背离),而 Qlib 则是让 人工智能&a…...

spoof 与网络安全:如何利用 MAC 地址伪造增强企业安全防护
spoof 与网络安全:如何利用 MAC 地址伪造增强企业安全防护 【免费下载链接】spoof Easily spoof your MAC address in macOS, Windows, & Linux! 项目地址: https://gitcode.com/gh_mirrors/sp/spoof 在当今数字化时代,网络安全已成为企业运营…...

SubDomainizer与其他工具集成:打造完整的网络安全评估工作流
SubDomainizer与其他工具集成:打造完整的网络安全评估工作流 【免费下载链接】SubDomainizer A tool to find subdomains and interesting things hidden inside, external Javascript files of page, folder, and Github. 项目地址: https://gitcode.com/gh_mirr…...

Xenia Canary架构解密:如何用即时编译技术复活Xbox 360游戏生态
Xenia Canary架构解密:如何用即时编译技术复活Xbox 360游戏生态 【免费下载链接】xenia-canary Xbox 360 Emulator Research Project 项目地址: https://gitcode.com/gh_mirrors/xe/xenia-canary 在游戏仿真技术领域,突破硬件壁垒实现跨平台游戏…...

基于CRICKIT与CircuitPython的蛇形机器人避障项目实践
1. 项目概述与核心思路最近在捣鼓一个挺有意思的创客项目:用Adafruit的CRICKIT扩展板和CircuitPython,做一个能自己溜达、遇到障碍会躲开的蛇形机器人。这玩意儿听起来复杂,其实拆解开来,核心就是“感知-决策-执行”这个经典的控制…...

PIM-LLM:1-bit量化大语言模型的混合内存计算架构
1. 项目概述PIM-LLM是一种创新的混合内存计算架构,专门为1-bit量化的大语言模型(LLM)设计。这个架构通过结合模拟内存计算(PIM)和数字脉动阵列,实现了对低精度和高精度矩阵乘法运算的高效加速。在边缘AI加速…...

Arm Development Studio 2025.1:嵌入式开发与多核调试实战
1. Arm Development Studio 2025.1 核心定位解析作为Arm官方推出的旗舰级开发套件,Arm Development Studio 2025.1(后简称DS-2025)延续了其"芯片级开发瑞士军刀"的产品定位。不同于通用型IDE,这套工具链从底层就为Arm架…...

飞凌T507核心板开发实战:开机LOGO、电阻屏校准与双屏异显配置详解
1. 项目概述与核心板简介最近在做一个车载信息娱乐终端的项目,硬件平台选用了飞凌嵌入式的FETT507-C核心板。这块板子基于全志T507这颗四核车规级处理器,Cortex-A53架构,主频1.5GHz,集成了G31 GPU,标配2GB DDR3L内存和…...

自托管链接管理工具LinkPress:从技术栈到部署实战
1. 项目概述:从“LinkPress”看开源链接聚合工具的演进最近在折腾个人知识库和内容管理时,发现了一个挺有意思的开源项目——mindori/linkpress。乍一看这个名字,你可能会联想到WordPress,没错,它的灵感确实来源于此&a…...