cesium 实现三维无人机航拍过程实景效果
需求背景
需要实现一个动态的三维无人机航拍过程实景效果
代码开发中,迭代功能待续...
解决效果
cesium 实现三维无人机航拍过程实景效果
index.vue
<template><div><el-button class="btn" @click="start">开始</el-button></div>
</template><script>
let lineEntity,lineDatasource = new Cesium.CustomDataSource("line-polygun"),wrjModelDatasource = new Cesium.CustomDataSource("wrj"),wrjEntity,wrjLineEntity,curPosition,lineArr =[]export default {data() {return {// 飞行区域边界线坐标coordinates: [[116.069898, 31.303655], [116.098708, 31.322126], [116.108063, 31.311256], [116.079317, 31.292959], [116.069898, 31.303655]],// 飞行路线points: [[116.069898, 31.303655, 200], [116.098708, 31.322126, 200], [116.108063, 31.311256, 200], [116.079317, 31.292959, 200]],// 当前飞行位置curRuningArr_i: 0,curRuningArr: [],}},mounted() {const viewer = window.dasViewer;viewer.scene.terrainProvider = new Cesium.EllipsoidTerrainProvider()viewer.dataSources.add(lineDatasource);viewer.dataSources.add(wrjModelDatasource);this.initwork()},destory() {lineDatasource.entities.removeAll()viewer.dataSources.remove(lineDatasource);wrjModelDatasource.entities.removeAll()viewer.dataSources.remove(wrjModelDatasource);},methods: {initwork() {const viewer = window.dasViewer;const pos = Cesium.Cartesian3.fromDegreesArray(this.coordinates.flat())const entity = lineDatasource.entities.add({polyline: {positions: pos,width: 1.5,material: Cesium.Color.fromCssColorString("#C0C0C0").withAlpha(0.5),// disableDepthTestDistance: Number.POSITIVE_INFINITY, //解决遮挡问题heightReference: Cesium.HeightReference.CLAMP_TO_GROUND,}})viewer.flyTo(entity)this.addModel()},addModel() {const viewer = window.dasViewer;const positions = Cesium.Cartesian3.fromDegreesArrayHeights(this.points.flat())wrjEntity = wrjModelDatasource.entities.add({position: Cesium.Cartesian3.fromDegrees(116.069898, 31.303655, 200),model: {uri: process.env.VUE_APP_MODEL_API + '/wrj.glb',scale: 100,horizontalOrigin: Cesium.HorizontalOrigin.CENTER,verticalOrigin: Cesium.VerticalOrigin.CENTER,},})wrjLineEntity = wrjModelDatasource.entities.add({polyline: {positions: positions,width: 1.5,material: Cesium.Color.fromCssColorString("red").withAlpha(1),heightReference: Cesium.HeightReference.NONE,}})// viewer.scene.postRender.addEventListener(()=>{// wrjLineEntity.polyline.positions = lineArr// });},start() {let runQueue = this.points.map((_, i) => ([this.points[i], this.points[i + 1]]))runQueue.pop()runQueue = runQueue.map(pos => ({pos,startCartesian3: Cesium.Cartesian3.fromDegrees(pos[0][0], pos[0][1], pos[0][2]), // 该路径起始点cartesian3Pos: pos.map(item => Cesium.Cartesian3.fromDegrees(item[0], item[1], item[2])) // 该路径起始点和目标点}))this.runRecursion(0, runQueue)},runRecursion(i, runArr, callback) {const self = thisconst speed = 700 // todo 默认速度为500m/sconst cartesian3Pos = runArr[i].cartesian3PoslineArr = runArr.slice(0, Math.max(1, i + 1)).map(item => item.startCartesian3).flat()self.curRuningArr_i = iself.curRuningArr = runArrself.runFn(cartesian3Pos, lineArr, speed, () => {if (++i < runArr.length) self.runRecursion(i, runArr, callback)})},runFn([startPosition, targetPosition], lineArr, speed, callback) { // [startPosition 初始点位 targetPosition 目标点位] lineArr 路径线点位 speed 速度const subtract = Cesium.Cartesian3.subtract(startPosition, targetPosition, new Cesium.Cartesian3());const meter = Cesium.Cartesian3.magnitude(subtract) // 得出距离多少米const step = meter / speedconst startTime = Cesium.JulianDate.now()curPosition = new Cesium.Cartesian3()wrjEntity.position = new Cesium.CallbackProperty(() => {const elapsedTime = Cesium.JulianDate.secondsDifference(Cesium.JulianDate.now(), startTime);const ratio = elapsedTime / step;if (ratio >= 1.0) {callback()return targetPosition.clone()} else {return Cesium.Cartesian3.lerp(startPosition, targetPosition, ratio, curPosition)}}, false);},}
}
</script><style lang="less" scoped>
.btn {position: fixed;top: 20px;left: 20px;
}
</style>
相关文章:

cesium 实现三维无人机航拍过程实景效果
需求背景 需要实现一个动态的三维无人机航拍过程实景效果 代码开发中,迭代功能待续... 解决效果 cesium 实现三维无人机航拍过程实景效果 index.vue <template><div><el-button class"btn" click"start">开始</el-butt…...

Rust:使用 Warp 框架编写基于 HTTPS 的 RESTful API
在 Rust 中使用 Warp 框架编写基于 HTTPS 的 RESTful API,你需要首先设置好 TLS/SSL 证书以启用 HTTPS。以下是一个基本的步骤指南: 步骤 1: 安装 Rust 和 Cargo 确保你已经安装了 Rust 和 Cargo。你可以从 Rust 官网 下载并安装 Rust。 步骤 2: 创建…...

测试开发工程师需要掌握什么技能?
测试开发工程师是软件开发中至关重要的角色之一。他们负责编写、维护和执行自动化测试脚本、开发测试工具和框架,以确保软件的质量和稳定性。为了成为一名优秀的测试开发工程师,你需要掌握以下技能: 1. 编程技能: 作为测试开发工…...
表达式的解析器)
SpelExpressionParser评估SpEL(Spring Expression Language)表达式的解析器
是Spring中用于解析和评估SpEL(Spring Expression Language)表达式的解析器,SpEL是一种强大且灵活的表达式语言,广泛用于Spring框架中,以便在运行时解析和评估表达式 主要功能 1.解析和评估表达式:spelExpressionParser可以解析复杂的表达式,并在运行时对其进行评估; 2.访问…...
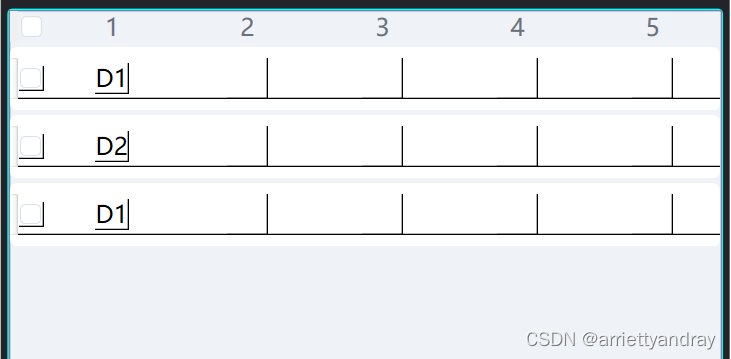
C#学习系列之DataGrid无故添加空行
C#学习系列之DataGrid无故添加空行 前言解决前解决后总结 前言 采用别人的轮子,想在基础上改界面,但是copy后,无论怎么样都会有空行,实在是绑定数据的输入没有任何赋值。 解决前 绑定的数据中输入三组数据,但是没有第…...

详解Alibaba Cloud Linux 3.2104 LTS 64位镜像操作系统
Alibaba Cloud Linux 3.2104是阿里云推出的云原生Linux发行版Alibaba Cloud Linux 3版本,64位操作系统,由阿里云提供免费长期维护更新和漏洞修复,镜像Alibaba Cloud Linux 3.2104 LTS 64位操作系统性能很不错,针对ECS云服务器进行…...
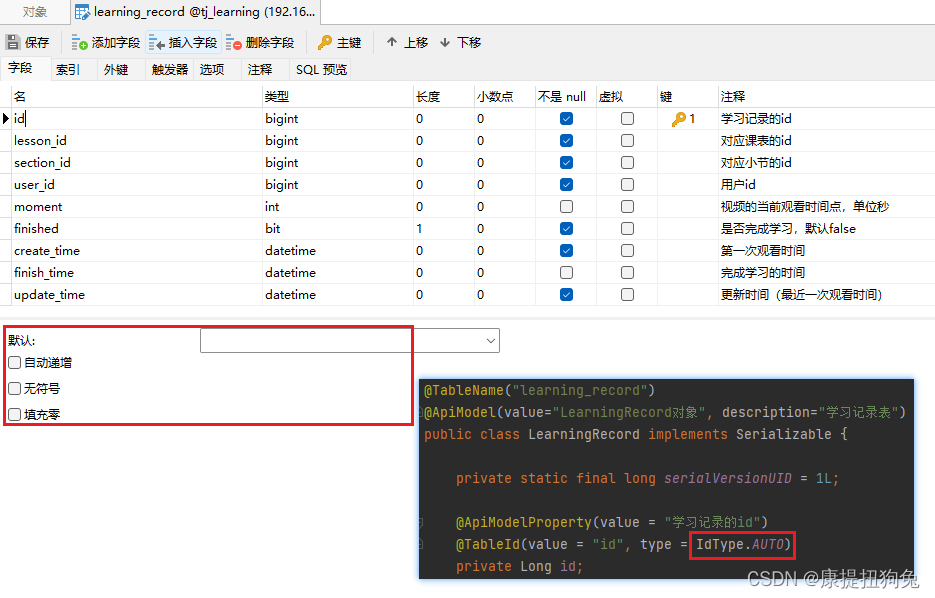
springboot异常产生原因
DataIntegrityViolationException Cause: java.sql.SQLException: Field ‘id’ doesn’t have a default value org.springframework.dao.DataIntegrityViolationException: ### Error updating database. Cause: java.sql.SQLException: Field id doesnt have a default …...
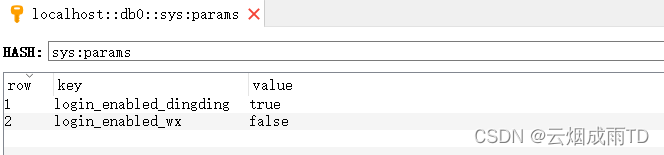
Redis 7.x 系列【8】数据类型之哈希(Hash)
有道无术,术尚可求,有术无道,止于术。 本系列Redis 版本 7.2.5 源码地址:https://gitee.com/pearl-organization/study-redis-demo 文章目录 1. 概述2. 常用命令2.1 HSET2.2 HGET2.3 HDEL2.4 HEXISTS2.5 HGETALL2.6 HKEYS2.7 HLE…...

jetson 安装 Rustdesk失败
报错: rustdesk depends on gstreamer1.0-pipewire; however: Package gstreamer1.0-pipewire is not installed. 原因: 对于rustdesk,其1.2.3 版需要gstreamer1.0-pipewire软件包,但是此软件包仅适用于 Ubuntu 22.04、22.10、23.04 和 2…...

Vue原生写全选反选框
效果 场景:Vue全选框在头部,子框在v-for循环内部。 实现:点击全选框,所有子项选中,再次点击取消;子项全选中,全选框自动勾选,子项并未全选,全选框不勾选;已选…...
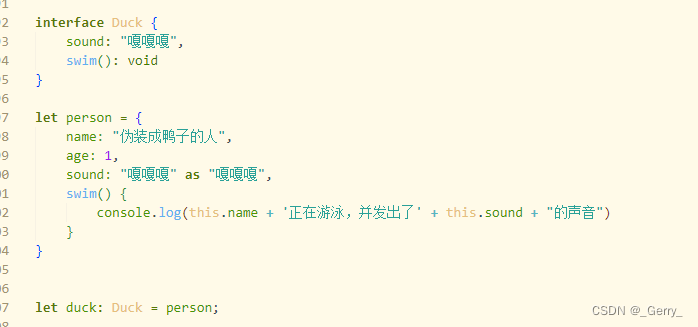
typescript学习回顾(三)
今天继续来分享ts的相关概念,枚举,ts模块化,接口和类型兼容性 ts的扩展类型:类型别名,枚举,接口和类 枚举 基础概念 枚举通常用于约束某个变量的取值范围。当然字面量和联合类型配合使用,也可…...

算尽天下财,铸就大明梦 —— 大明钱算子夏元吉的传奇一生
仕途生涯开始:洪武二十三年(1390年),夏元吉因精通《诗经》,由湖广乡荐参加礼部组织的会试,虽未中举,但他并未气馁,反而更加努力地学习。洪武二十四年(1391年)…...

openCV3.0 C++ 学习笔记补充(自用 代码+注释)---持续更新 二(51-)
环境:OpenCV3.2.0 VS2015 51、Mean-Shift算法分割图像 cv::pyrMeanShiftFiltering() 参考链接:【从零学习OpenCV 4】分割图像——Mean-Shift分割算法 Mean-Shift算法又被称为均值漂移法,是一种基于颜色空间分布(彩色图像的像素值)的图像分割…...
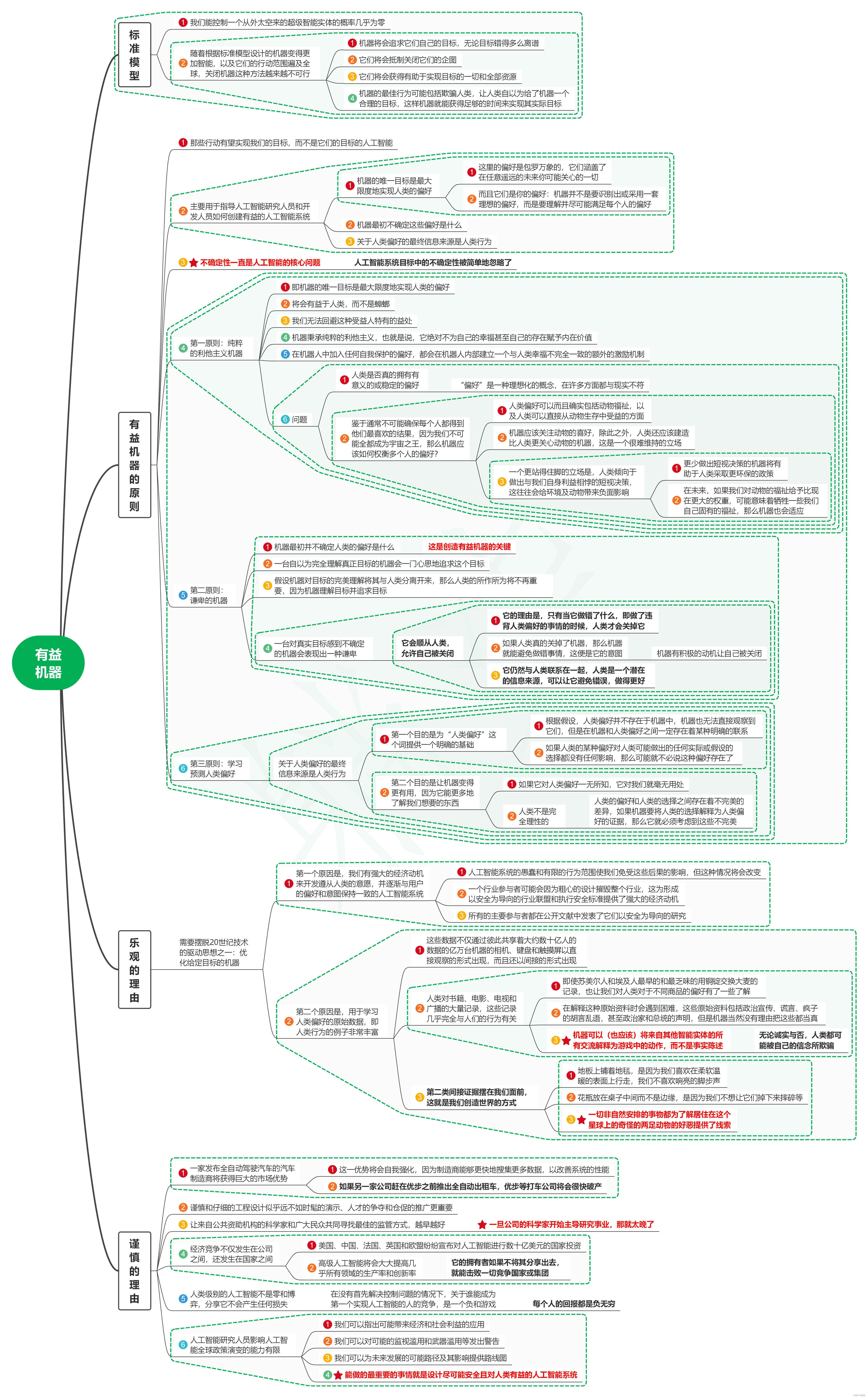
读AI新生:破解人机共存密码笔记13有益机器
1. 标准模型 1.1. 我们能控制一个从外太空来的超级智能实体的概率几乎为零 1.2. 随着根据标准模型设计的机器变得更加智能,以及它们的行动范围遍及全球,关闭机器这种方法越来越不可行 1.2.1. 机器将会追求它们自己的目标,无论目标错得多么…...

Spring Boot中使用Swagger生成API文档
Spring Boot中使用Swagger生成API文档 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!在现代的软件开发中,良好的API文档是团队协作和开发效率不可或…...

解决 macOS 中“无法验证开发者”的问题
解决 macOS 中“无法验证开发者”的问题 在使用 macOS 系统时,你可能会遇到一个常见的问题:当你尝试安装或打开某些应用程序时,系统会弹出一个警告,提示“无法验证开发者”。这通常发生在从非官方 App Store 下载的应用程序上。本…...
Emp.dll文件丢失?理解Emp.dll重要性与处理常见问题
在繁多的动态链接库(DLL)文件中,emp.dll 可能不是最广为人知的,但在特定软件或环境中,它扮演着关键角色。本文旨在深入探讨 emp.dll 的功能、重要性以及面对常见问题时的解决策略。 什么是 emp.dll? Emp.d…...

知识平台管理系统设计
知识平台管理系统设计是一个综合性的过程,旨在为企业或组织提供一个高效、便捷的知识管理解决方案。以下是知识平台管理系统设计的详细阐述: 一、设计目标和原则 1、设计目标:设计一款功能强大、易于使用、支持多种知识形式分类和搜索的知识管…...

Python 中字符串修饰符
1. 原始字符串 (Raw String) - r 或 R 使用 r 或 R 前缀,可以告诉 Python 字符串中的所有反斜杠都是普通字符,而不是转义字符。这在处理文件路径、正则表达式等情况下非常有用。 path rC:\new_folder\test.txt # 原始字符串2. 格式化字符串 (Formatt…...
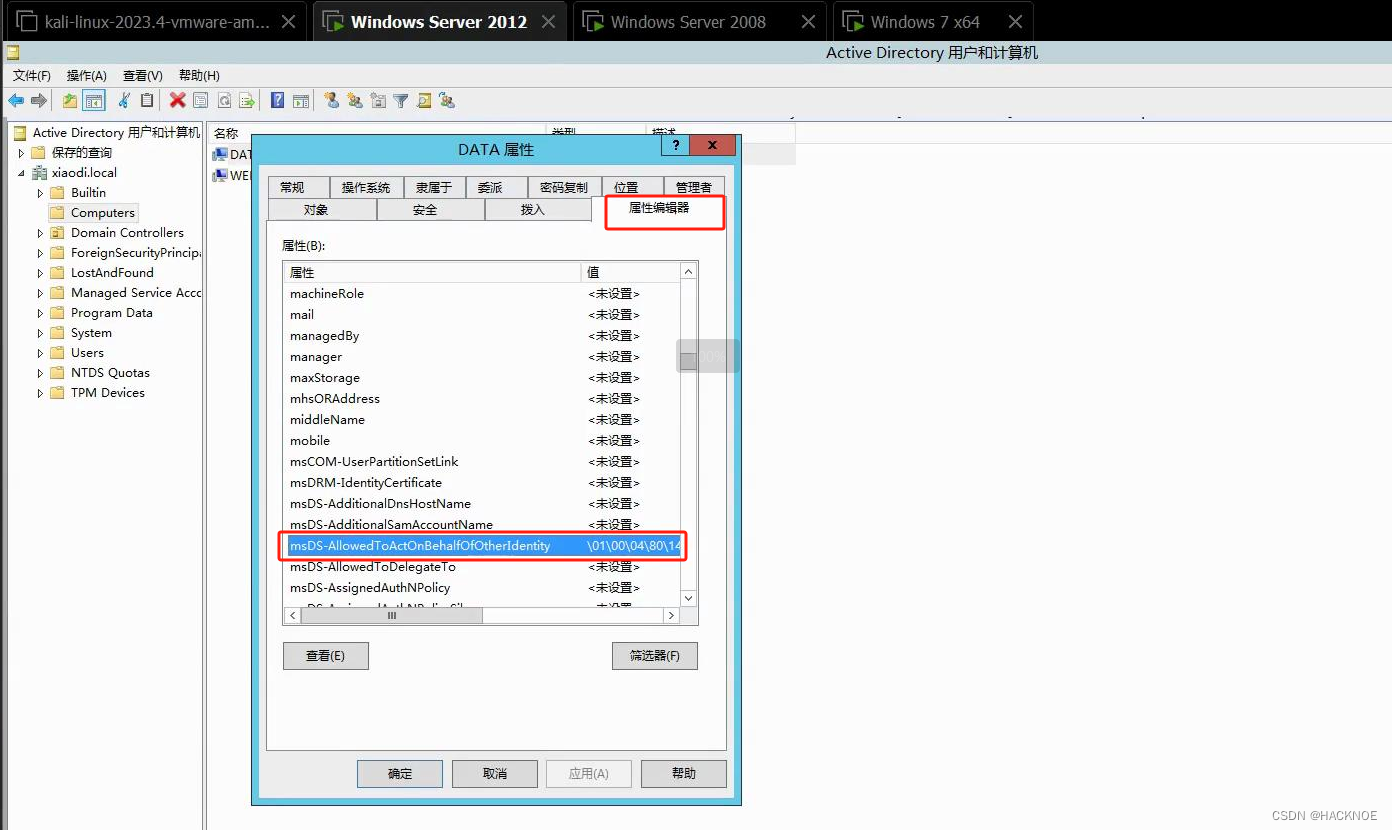
红队内网攻防渗透:内网渗透之内网对抗:横向移动篇Kerberos委派安全RBCD资源Operators组成员HTLMRelay结合
红队内网攻防渗透 1. 内网横向移动1.1 横向移动-资源约束委派-利用域用户主机加入1.1.1 利用思路1.1.2 利用条件1.1.3 利用过程1.2 横向移动-资源约束委派-Acount Operators组1.2.1 利用思路:1.2.2 利用条件:1.2.3 利用过程:1.3 横向移动-资源约束委派-CVE结合HTLMRelay1.3.…...

百度网盘群晖套件终极指南:3步实现NAS云存储完美整合
百度网盘群晖套件终极指南:3步实现NAS云存储完美整合 【免费下载链接】synology-baiduNetdisk-package 项目地址: https://gitcode.com/gh_mirrors/sy/synology-baiduNetdisk-package 想在群晖NAS上直接管理百度网盘文件?这个开源套件让你轻松实…...

5分钟掌握Windows安装Android应用的终极方案
5分钟掌握Windows安装Android应用的终极方案 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾想过在Windows电脑上直接运行Android应用,却苦于复杂的…...

专业指南:Anno 1800 Mod Loader完整使用教程与架构解析
专业指南:Anno 1800 Mod Loader完整使用教程与架构解析 【免费下载链接】anno1800-mod-loader The one and only mod loader for Anno 1800, supports loading of unpacked RDA files, XML merging and Python mods. 项目地址: https://gitcode.com/gh_mirrors/an…...
)
从实验室小白到跑通第一个模型:我的DeepLabCut安装踩坑全记录(Windows 11 + RTX 4060)
从实验室小白到跑通第一个模型:我的DeepLabCut安装踩坑全记录(Windows 11 RTX 4060) 去年刚进实验室时,导师扔给我一篇Nature Methods论文说"试试这个工具",从此开始了与DeepLabCut的"相爱相杀"。…...

pip cache purge 清理下载缓存文件
如上图所示的这个目录是 Python 的包管理工具 pip 用来存储下载过的安装包(wheel 或源码包)的缓存。它的主要作用是在你下次安装同一个包时,可以直接从本地读取,而无需再次从网络下载,从而加快安装速度。 但是…...
)
别只盯着YOLOv5了!从R-CNN到DETR:手把手带你看懂目标检测算法演进史(附论文精读笔记)
从R-CNN到DETR:目标检测算法的范式革命与技术演进 当计算机视觉领域的研究者翻开2023年的顶会论文时,会发现目标检测任务已经呈现出与五年前截然不同的技术图景。这个看似"古老"的计算机视觉基础任务,正在经历着从传统卷积到Transf…...

手机号到QQ号查询技术实现原理与TEA加密通信架构解析
手机号到QQ号查询技术实现原理与TEA加密通信架构解析 【免费下载链接】phone2qq 项目地址: https://gitcode.com/gh_mirrors/ph/phone2qq phone2qq是一个基于Python实现的逆向工程工具,通过分析腾讯QQ客户端的通信协议,实现了通过手机号查询对应…...

Android Studio中文界面:从英文困扰到母语开发的完整解决方案
Android Studio中文界面:从英文困扰到母语开发的完整解决方案 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack 你是否曾…...

服装吊牌变量条码打印机:优质供应商选择策略解析
“选对服装吊牌变量条码打印机供应商,比单纯比价更重要的是匹配柔性生产需求——这是超六成服装从业者反馈的采购核心准则。”中小商家面临小批量吊牌外发成本高、出货慢的困境,大企业则受限于多SKU适配难、数据不同步的痛点,如何找到能覆盖全…...

【Claude API集成实战指南】:20年专家亲授FastAPI高效对接Claude的7大避坑法则
更多请点击: https://intelliparadigm.com 第一章:Claude API集成的核心原理与FastAPI技术选型 Claude API 采用基于 HTTP/2 的流式 REST 接口设计,核心通信模式为双向流(/v1/messages 端点),支持 event:…...