CMake笔记之CMAKE_INSTALL_PREFIX详解以及ROS中可执行文件为什么会在devel_lib中
CMake笔记之CMAKE_INSTALL_PREFIX详解以及ROS中可执行文件为什么会在devel_lib中

code review!
文章目录
- CMake笔记之CMAKE_INSTALL_PREFIX详解以及ROS中可执行文件为什么会在devel_lib中
- 1.`CMAKE_INSTALL_PREFIX`详解
- 变量作用
- 设置 `CMAKE_INSTALL_PREFIX`
- 示例
- 影响范围
- 常见用法
- 特别注意
- 总结
- 2.为什么我可以在这里找到我的可执行文件:devel/lib/ros_templete_pub/ros_templete_pub
- 构建目录结构
- 安装目录结构
- 流程解释
- 总结
1.CMAKE_INSTALL_PREFIX详解
CMAKE_INSTALL_PREFIX 是 CMake 中的一个重要变量,它定义了安装路径的前缀,决定了项目安装目录的根位置。理解和正确使用 CMAKE_INSTALL_PREFIX 对于控制软件包的安装位置非常重要,特别是在多项目构建和部署环境中。
变量作用
CMAKE_INSTALL_PREFIX 决定了 make install 或 cmake --install 命令将项目文件安装到哪个根目录。默认情况下,它的值通常是 /usr/local,但可以根据需要进行修改。
设置 CMAKE_INSTALL_PREFIX
可以在运行 cmake 命令时通过命令行参数设置 CMAKE_INSTALL_PREFIX,例如:
cmake -DCMAKE_INSTALL_PREFIX=/desired/install/path ..
或者在 CMakeLists.txt 中设置:
set(CMAKE_INSTALL_PREFIX "/desired/install/path" CACHE PATH "Install path prefix")
示例
假设有一个简单的 CMake 项目:
cmake_minimum_required(VERSION 3.0)
project(MyProject)add_executable(my_executable main.cpp)install(TARGETS my_executableRUNTIME DESTINATION bin)
如果运行以下命令:
cmake -DCMAKE_INSTALL_PREFIX=/home/user/myproject_install ..
make
make install
那么 my_executable 会被安装到 /home/user/myproject_install/bin 目录中。
影响范围
CMAKE_INSTALL_PREFIX 影响所有相对路径的安装目标。例如,以下 CMake 语句:
install(TARGETS my_executable RUNTIME DESTINATION bin)
结合 CMAKE_INSTALL_PREFIX,会将 my_executable 安装到 ${CMAKE_INSTALL_PREFIX}/bin 目录。
常见用法
-
默认安装路径:
- 默认值是
/usr/local,适合系统全局安装。
- 默认值是
-
用户本地安装:
- 对于没有管理员权限的用户,可以将安装路径设为用户的主目录,例如
~/myproject_install。
cmake -DCMAKE_INSTALL_PREFIX=~/myproject_install .. - 对于没有管理员权限的用户,可以将安装路径设为用户的主目录,例如
-
自定义目录:
- 在构建环境中,可能需要将不同项目安装到特定目录中以避免冲突。
cmake -DCMAKE_INSTALL_PREFIX=/opt/myproject ..
特别注意
- CMake 缓存:
CMAKE_INSTALL_PREFIX是一个缓存变量,如果修改了它,需要重新配置 CMake 或删除CMakeCache.txt文件以确保新值生效。 - 相对路径: 如果给
CMAKE_INSTALL_PREFIX赋值相对路径,它会被解释为相对于当前构建目录的路径。通常最好提供绝对路径以避免混淆。
总结
CMAKE_INSTALL_PREFIX 是一个关键变量,用于指定项目的安装根目录。通过正确设置这个变量,可以灵活地控制项目的安装位置,满足不同的部署需求。无论是全局安装、用户本地安装,还是特定目录安装,CMAKE_INSTALL_PREFIX 都能提供强大的支持。
2.为什么我可以在这里找到我的可执行文件:devel/lib/ros_templete_pub/ros_templete_pub
使用
install(TARGETS ros_templete_pubRUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
在 ROS(机器人操作系统)中,使用 Catkin 构建系统时,构建过程中生成的文件通常会放置在 devel 目录中。这是因为 Catkin 使用了两个主要的构建空间:devel 和 install。下面解释为什么会在 devel/lib/ros_templete_pub/ros_templete_pub 找到可执行文件。
构建目录结构
devel目录:- 该目录是开发空间(development space),在这里构建的文件可以直接使用而无需安装。
- 运行
catkin_make或catkin build时,生成的可执行文件和其他构建产物会放置在devel目录下。 devel/lib目录通常包含构建生成的可执行文件,因为在 ROS 中,lib 目录不仅用于库文件,也用于存放节点的可执行文件。
安装目录结构
install目录:- 该目录是安装空间(install space),通过执行
catkin_make install或catkin build --install生成的文件会被安装到这里。 install目录中的结构由 CMakeinstall命令决定,例如install(TARGETS ...)语句。
- 该目录是安装空间(install space),通过执行
流程解释
-
构建阶段:
- 当运行
catkin_make或catkin build时,CMake 会在devel目录中生成所有构建产物。 - 可执行文件通常会放置在
devel/lib/<package_name>/目录中。因此,会在devel/lib/ros_templete_pub/ros_templete_pub找到的可执行文件。
- 当运行
-
安装阶段:
- 如果运行
catkin_make install或catkin build --install,CMake 会根据CMakeLists.txt中的install规则将文件安装到install目录中。 - 例如,使用
install(TARGETS ros_templete_pub RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION})会将ros_templete_pub安装到${CMAKE_INSTALL_PREFIX}/bin,即通常为install/bin/。
- 如果运行
总结
在 devel/lib/ros_templete_pub/ros_templete_pub 找到可执行文件是因为:
- 开发空间: 在构建过程中,Catkin 默认将可执行文件放置在
devel目录中,以便可以立即运行和测试这些文件,而无需执行安装步骤。 - 目录结构:
devel/lib/<package_name>/是 Catkin 默认的可执行文件输出路径。
如果需要将可执行文件安装到其他位置,请使用 catkin_make install 或 catkin build --install,并确保在的 CMakeLists.txt 中正确配置了 install 命令。
相关文章:
CMake笔记之CMAKE_INSTALL_PREFIX详解以及ROS中可执行文件为什么会在devel_lib中
CMake笔记之CMAKE_INSTALL_PREFIX详解以及ROS中可执行文件为什么会在devel_lib中 code review! 文章目录 CMake笔记之CMAKE_INSTALL_PREFIX详解以及ROS中可执行文件为什么会在devel_lib中1.CMAKE_INSTALL_PREFIX详解变量作用设置 CMAKE_INSTALL_PREFIX示例影响范围常见用法特别…...
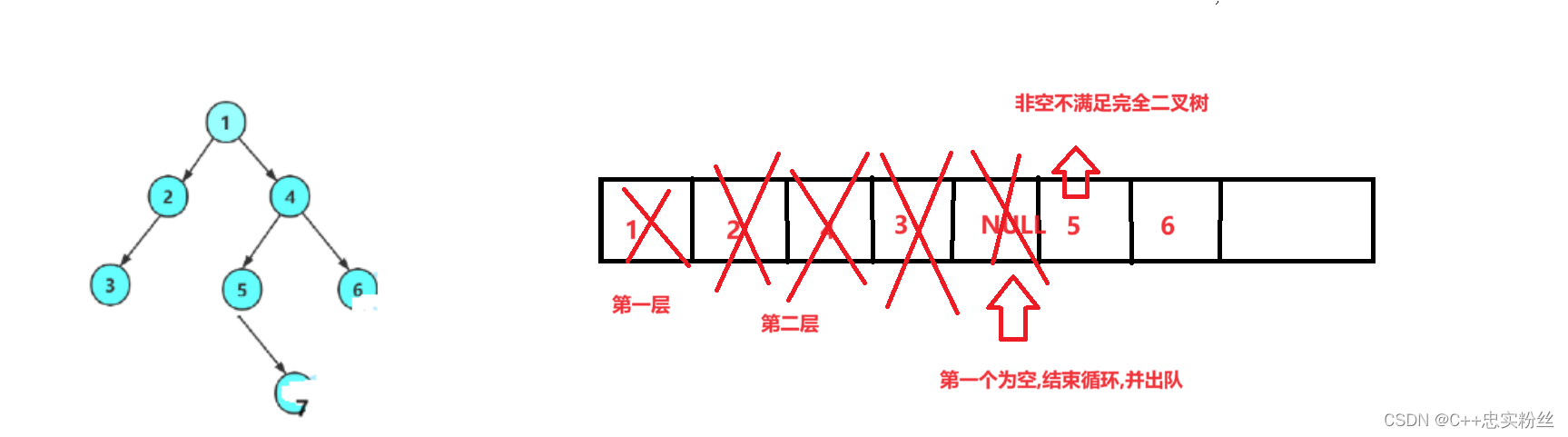
数据结构之二叉树的超详细讲解(3)--(二叉树的遍历和操作)
个人主页:C忠实粉丝 欢迎 点赞👍 收藏✨ 留言✉ 加关注💓本文由 C忠实粉丝 原创 数据结构之二叉树的超详细讲解(3)--(二叉树的遍历和操作) 收录于专栏【数据结构初阶】 本专栏旨在分享学习数据结构学习的一点学习笔记,欢迎大家在评…...

Arduino - 旋转编码器 - 伺服电机
Arduino - 旋转编码器 - 伺服电机 Arduino - Rotary Encoder In this tutorial, We are going to learn how to program Arduino to rotate a servo motor according to the rotary encoder’s output value. 在本教程中,我们将学习如何对Arduino进行编程ÿ…...

儿童电动音乐牙刷OTP芯片方案:NV040C,耐温耐压,抗干扰能力强
一:方案背景概述 随着科技的飞速发展,源于对儿童口腔健康深入细致的关怀,以及对现代科技在日常生活用品中应用的不断追求,儿童电动音乐牙刷OTP芯片方案的诞生。 二:芯片简介 NV040C语音芯片是一款性能稳定、适合工厂量…...
Sentinel链路流控模式失效的解决方法
解决方法 1、在pom.xml中增加sentinel-web-servlet的依赖,我使用的版本是1.7.1 <dependency><groupId>com.alibaba.csp</groupId><artifactId>sentinel-web-servlet</artifactId> </dependency>2、在项目中添加一个FilterCon…...
Web应用安全测试-专项漏洞(一)
Web应用安全测试-专项漏洞(一) 专项漏洞部分注重测试方法论,每个专项仅列举一个例子。实际测试过程中,需视情况而定。 文章目录 Web应用安全测试-专项漏洞(一)Web组件(SSL/WebDAV)漏…...
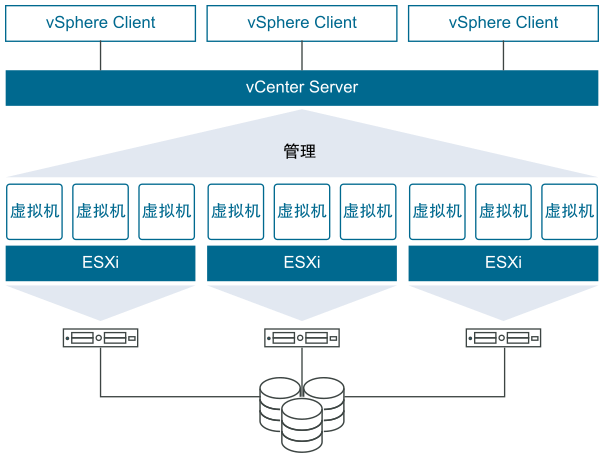
VMware ESXi 8.0U2c macOS Unlocker OEM BIOS Huawei (华为) FusionServer 定制版
VMware ESXi 8.0U2c macOS Unlocker & OEM BIOS Huawei (华为) FusionServer 定制版 ESXi 8.0U2 标准版,Dell (戴尔)、HPE (慧与)、Lenovo (联想)、Inspur (浪潮)、Cisco (思科)、Hitachi (日立)、Fujitsu (富士通)、NEC (日电)、Huawei (华为)、xFusion (超聚…...

python中的高阶函数介绍
在Python中,高阶函数是指那些可以接受函数作为参数或者返回函数作为结果的函数。这种特性使得函数式编程成为可能,并且可以编写出更加简洁和灵活的代码。以下是Python中一些常用的高阶函数: map() map() 函数接受一个函数和一个可迭代对象作为…...

华为OD机试 - 石头剪刀布游戏(Java 2024 D卷 200分)
华为OD机试 2024D卷题库疯狂收录中,刷题点这里 专栏导读 本专栏收录于《华为OD机试(JAVA)真题(D卷C卷A卷B卷)》。 刷的越多,抽中的概率越大,每一题都有详细的答题思路、详细的代码注释、样例测…...

[开发|java] LocalDate转化为LocalDateTime
要将 java.time.LocalDate 转换为 java.time.LocalDateTime,你需要指定一天中的时间。因为 LocalDate 只包含日期部分(年、月、日),而 LocalDateTime 包含日期和时间(时、分、秒、纳秒),所以在转…...

介绍几种 MySQL 官方高可用方案
前言: MySQL 官方提供了多种高可用部署方案,从最基础的主从复制到组复制再到 InnoDB Cluster 等等。本篇文章以 MySQL 8.0 版本为准,介绍下不同高可用方案架构原理及使用场景。 1.MySQL Replication MySQL Replication 是官方提供的主从同…...
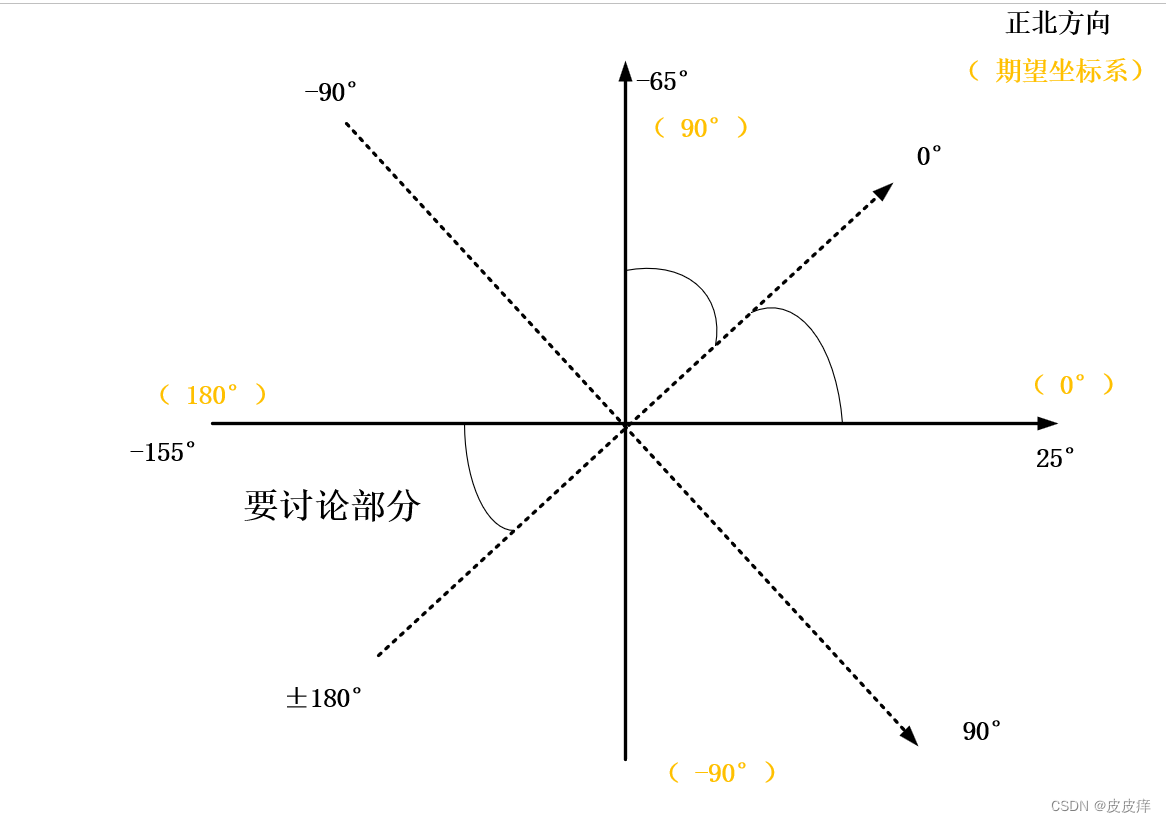
IMU坐标系与自定义坐标系转化
1.首先示例图为例: 虚线黑色角度为IMU的坐标系;实线为自定义坐标系; 矫正:(默认angleyaw为IMU采的数据角度) angleyaw_pt angleyaw-25;if(-180<angleyaw&&angleyaw<-155) // 角度跳变问…...
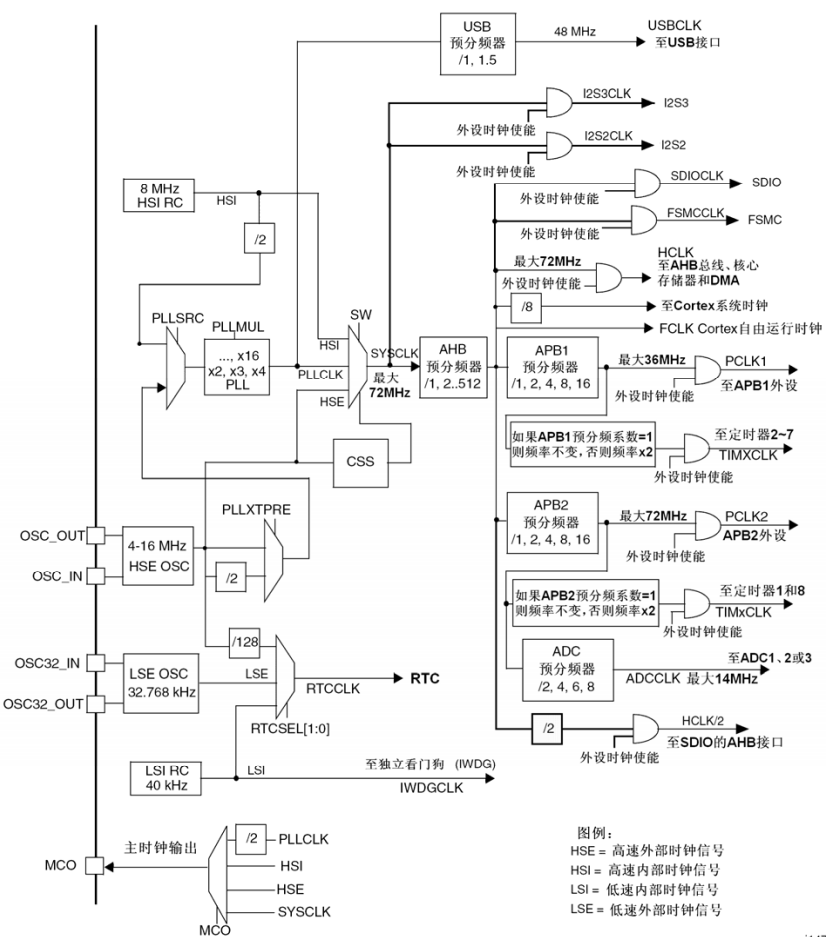
《STM32 HAL库》RCC 相关系列函数详尽解析—— HAL_RCC_OscConfig()
观前提示:函数完整代码在文末,本文梳理了函数HAL_RCC_OscConfig()的主要逻辑和实现方法f105时钟树详解图 HAL_RCC_OscConfig() 函数介绍: 此函数是一个用于初始化RCC(Reset and Clock Control)振荡器(Osc…...
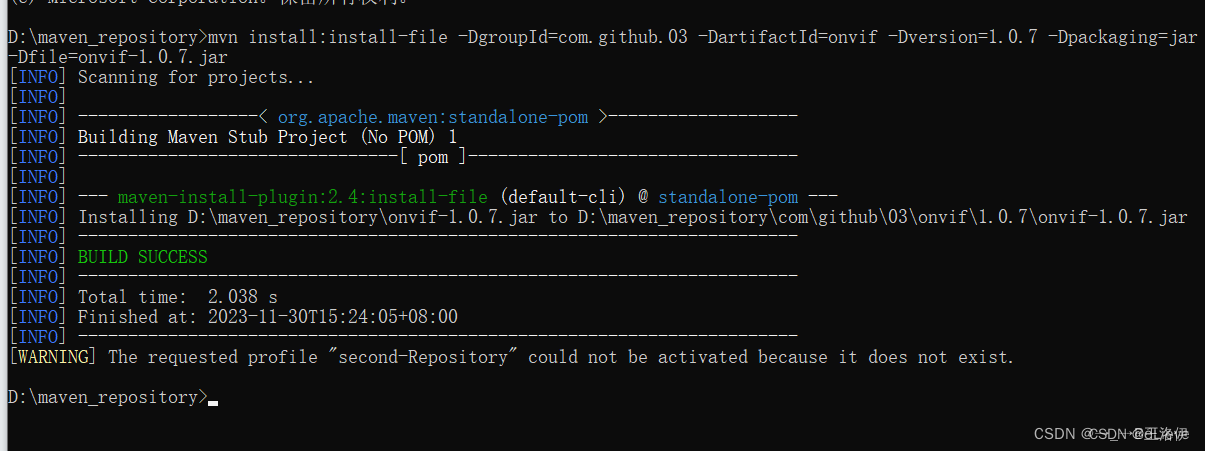
手动将jar包导入本地Maven仓库
1、进入存放jar包的目录,可以先放进仓库底下 2、cmd回车 3、执行命令,看到BUILD SUCCESS就是成功了 -DgroupId、-DartifactId、-Dversion、-Dfile记得换成自己对应的 mvn install:install-file -DgroupIdcom.github.03 -DartifactIdonvif -Dversion1.0…...

煤安防爆手机为什么能在煤矿井下使用
煤安防爆手机之所以能在煤矿井下使用,是因为它们经过特殊设计,符合严格的防爆安全标准,能够防止电火花引发爆炸,同时具备防尘防水、抗冲击等特性,确保在恶劣的煤矿环境中稳定可靠地运行,为工作人员提供安全…...

科普小课堂|不同版本USB接口详细解析
USB接口凭借其广泛的兼容性和高性能,已成为连接多样外设的主要接口,囊括了日常的键盘、鼠标等输入设备以及其他更多的领域。不仅如此,USB还展现了高度灵活性,能够便捷地转换为其他总线接口,例如实现USB到以太网或USB到…...

Spring Boot中的JSON解析优化
Spring Boot中的JSON解析优化 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!今天我们将探讨在Spring Boot应用中如何优化JSON解析,以提升系统的性能…...
全彩屏负氧离子监测站
TH-FZ5在追求绿色生态、健康出行的今天,景区不仅仅是人们休闲游玩的好去处,更是人们体验大自然、感受清新空气的重要场所。为了进一步提升游客的游览体验,许多景区纷纷引入了全彩屏负氧离子监测站,这一创新举措不仅为景区增添了科…...

LeetCode 1207.独一无二的数
题目要求 给你一个整数数组 arr,请你帮忙统计数组中每个数的出现次数。如果每个数的出现次数都是独一无二的,就返回 true;否则返回 false。示例 1:输入:arr [1,2,2,1,1,3] 输出:true 解释:在该…...
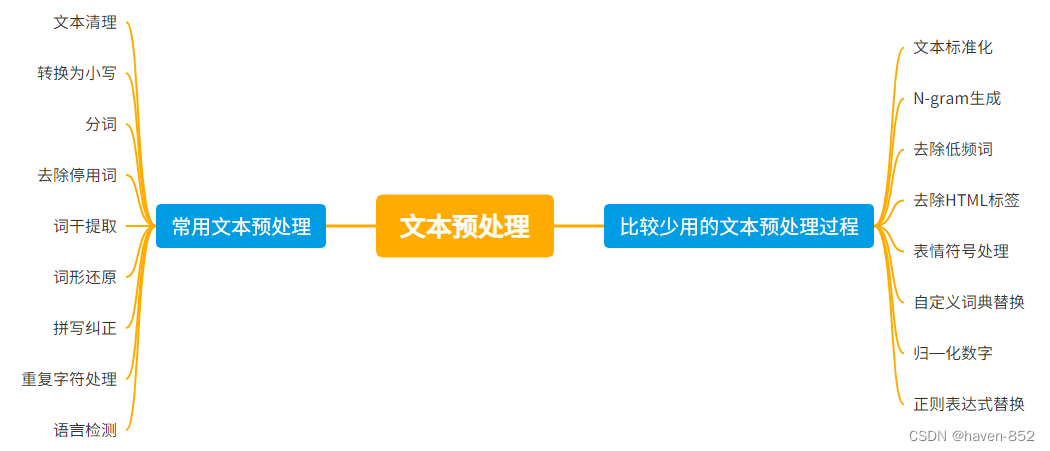
自然语言处理——英文文本预处理
高质量数据的重要性 数据的质量直接影响模型的性能和准确性。高质量的数据可以显著提升模型的学习效果,帮助模型更准确地识别模式、进行预测和决策。具体原因包括以下几点: 噪音减少:高质量的数据经过清理,减少了无关或错误信息…...

终极iOS设备降级指南:使用Legacy-iOS-Kit让旧设备重获新生 [特殊字符]
终极iOS设备降级指南:使用Legacy-iOS-Kit让旧设备重获新生 🚀 【免费下载链接】Legacy-iOS-Kit An all-in-one tool to restore/downgrade, save SHSH blobs, jailbreak legacy iOS devices, and more 项目地址: https://gitcode.com/gh_mirrors/le/Le…...

飞蜂窝技术:从概念到5G室内覆盖核心的实战演进
1. 从“未来可期”到“正在爆发”:飞蜂窝技术的十年之约在通信行业里待久了,你总会听到一些技术名词被反复提起,它们像流星一样划过天际,被分析师们预言将“改变一切”,然后……似乎又沉寂了下去。飞蜂窝(F…...

基础模型全生命周期管理的混合架构实践与优化
1. 基础模型全生命周期管理的架构挑战基础模型(Foundation Models)正在重塑AI技术栈的每个环节,从预训练到推理部署的全生命周期管理面临前所未有的系统架构挑战。传统HPC(高性能计算)集群和云原生平台各自为政的局面&…...

Standard计划突然限速?揭秘MJ v6.1后台配额算法变更,3步绕过队列延迟,今日生效
更多请点击: https://intelliparadigm.com 第一章:Standard计划限速事件的全貌还原 2024年Q2,Standard计划在多个云原生生产环境中突发性触发API速率限制(Rate Limiting),导致下游服务批量超时与重试风暴。…...

Claude智能优化器:提升AI应用开发效率的提示词工程中间件
1. 项目概述与核心价值 最近在折腾AI应用开发,特别是围绕Claude API做各种自动化工具时,发现一个挺普遍的问题:直接调用Claude API返回的答案,有时候会显得有点“啰嗦”或者“不够聚焦”。比如你让它写一段代码,它可能…...

惠普OMEN游戏本性能优化终极指南:如何用开源工具彻底释放硬件潜力
惠普OMEN游戏本性能优化终极指南:如何用开源工具彻底释放硬件潜力 【免费下载链接】OmenSuperHub 使用 WMI BIOS控制性能和风扇速度,自动解除DB功耗限制。 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 还在为惠普OMEN游戏本官方软…...
那些鲜为人知的“前世今生”)
从多媒体到HPC:聊聊IBM GPFS(Spectrum Scale)那些鲜为人知的“前世今生”
从多媒体到HPC:IBM GPFS的技术进化与商业智慧 1993年,当第一代数字视频编辑系统还在为处理480p分辨率视频而焦头烂额时,IBM实验室里的一组工程师正在解决一个更根本的问题——如何让多个工作站同时高效访问同一组视频素材。这个看似简单的需求…...

从特斯拉事故看自动驾驶数据存储与系统安全设计
1. 事故背景与NTSB调查报告的核心价值2016年发生的那起特斯拉Model S与白色半挂卡车相撞的致命事故,相信很多关注汽车技术发展的朋友都还记得。当时这起事故引发了业界对自动驾驶辅助系统安全性的第一轮大规模公开讨论。一年多后,美国国家运输安全委员会…...

利用ODX实现整车诊断数据库管理
一:背景与挑战| 背景:在全球汽车行业快速发展的背景下,对车辆诊断技术的要求也在不断提升。ODX(Open Diagnostic data eXchange)作为行业标准的诊断数据库,已被各大汽车制造商广泛采用,并贯穿于ECU的整个生…...
PixelAnnotationTool:破解语义分割标注效率瓶颈的智能解决方案
PixelAnnotationTool:破解语义分割标注效率瓶颈的智能解决方案 【免费下载链接】PixelAnnotationTool Annotate quickly images. 项目地址: https://gitcode.com/gh_mirrors/pi/PixelAnnotationTool 在计算机视觉领域,高质量的语义分割数据标注是…...