ROS2开发机器人移动
.创建功能包和节点
这里我们设计两个节点
example_interfaces_robot_01,机器人节点,对外提供控制机器人移动服务并发布机器人的状态。
example_interfaces_control_01,控制节点,发送机器人移动请求,订阅机器人状态话题。
创建节点
ros2 pkg create example_interfaces_rclcpp --build-type ament_cmake --dependencies rclcpp example_ros2_interfaces --destination-directory src --node-name example_interfaces_robot_01
touch src/example_interfaces_rclcpp/src/example_interfaces_control_01.cpp
#include "rclcpp/rclcpp.hpp"
#include "example_ros2_interfaces/srv/move_robot.hpp"
#include "example_ros2_interfaces/msg/robot_status.hpp"
class ExampleInterfacesControl : public rclcpp::Node {
public:
ExampleInterfacesControl(std::string name) : Node(name) {
RCLCPP_INFO(this->get_logger(), "节点已启动:%s.", name.c_str());
/*创建move_robot客户端*/
client_ = this->create_client<example_ros2_interfaces::srv::MoveRobot>(
"move_robot");
/*订阅机器人状态话题*/
robot_status_subscribe_ = this->create_subscription<example_ros2_interfaces::msg::RobotStatus>("robot_status", 10, std::bind(&ExampleInterfacesControl::robot_status_callback_, this, std::placeholders::_1));
}
/**
* @brief 发送移动机器人请求函数
* 步骤:1.等待服务上线
* 2.构造发送请求
*
* @param distance
*/
void move_robot(float distance) {
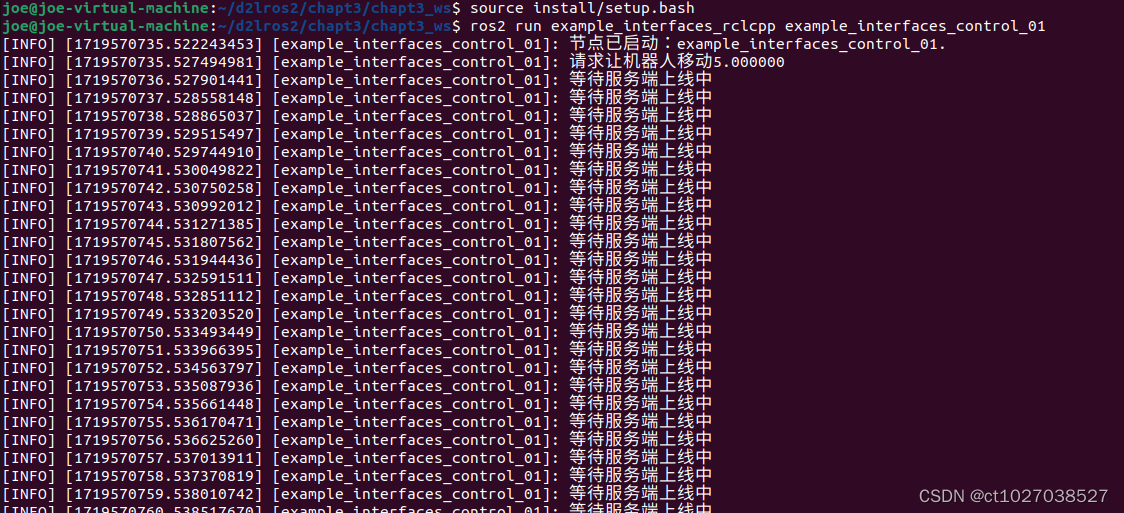
RCLCPP_INFO(this->get_logger(), "请求让机器人移动%f", distance);
/*等待服务端上线*/
while (!client_->wait_for_service(std::chrono::seconds(1))) {
//等待时检测rclcpp的状态
if (!rclcpp::ok()) {
RCLCPP_ERROR(this->get_logger(), "等待服务的过程中被打断...");
return;
}
RCLCPP_INFO(this->get_logger(), "等待服务端上线中");
}
// 构造请求
auto request =
std::make_shared<example_ros2_interfaces::srv::MoveRobot::Request>();
request->distance = distance;
// 发送异步请求,然后等待返回,返回时调用回调函数
client_->async_send_request(
request, std::bind(&ExampleInterfacesControl::result_callback_, this,
std::placeholders::_1));
};
private:
// 声明客户端
rclcpp::Client<example_ros2_interfaces::srv::MoveRobot>::SharedPtr client_;
rclcpp::Subscription<example_ros2_interfaces::msg::RobotStatus>::SharedPtr robot_status_subscribe_;
/* 机器人移动结果回调函数 */
void result_callback_(
rclcpp::Client<example_ros2_interfaces::srv::MoveRobot>::SharedFuture
result_future) {
auto response = result_future.get();
RCLCPP_INFO(this->get_logger(), "收到移动结果:%f", response->pose);
}
/**
* @brief 机器人状态话题接收回调函数
*
* @param msg
*/
void robot_status_callback_(const example_ros2_interfaces::msg::RobotStatus::SharedPtr msg)
{
RCLCPP_INFO(this->get_logger(), "收到状态数据位置:%f 状态:%d", msg->pose ,msg->status);
}
};
int main(int argc, char** argv) {
rclcpp::init(argc, argv);
auto node = std::make_shared<ExampleInterfacesControl>("example_interfaces_control_01");
/*这里调用了服务,让机器人向前移动5m*/
node->move_robot(5.0);
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
编写机器人节点逻辑
example_interfaces_robot_01.cpp
#include "example_ros2_interfaces/msg/robot_status.hpp"
#include "example_ros2_interfaces/srv/move_robot.hpp"
#include "rclcpp/rclcpp.hpp"
/*创建一个机器人类,模拟真实机器人*/
class Robot {
public:
Robot() = default;
~Robot() = default;
/**
* @brief 移动指定的距离
*
* @param distance
* @return float
*/
float move_distance(float distance) {
status_ = example_ros2_interfaces::msg::RobotStatus::STATUS_MOVEING;
target_pose_ += distance;
// 当目标距离和当前距离大于0.01则持续向目标移动
while (fabs(target_pose_ - current_pose_) > 0.01) {
// 每一步移动当前到目标距离的1/10
float step = distance / fabs(distance) * fabs(target_pose_ - current_pose_) * 0.1;
current_pose_ += step;
std::cout << "移动了:" << step << "当前位置:" << current_pose_ << std::endl;
// 当前线程休眠500ms
std::this_thread::sleep_for(std::chrono::milliseconds(500));
}
status_ = example_ros2_interfaces::msg::RobotStatus::STATUS_STOP;
return current_pose_;
}
/**
* @brief Get the current pose
*
* @return float
*/
float get_current_pose() { return current_pose_; }
/**
* @brief Get the status
*
* @return int
* 1 example_ros2_interfaces::msg::RobotStatus::STATUS_MOVEING
* 2 example_ros2_interfaces::msg::RobotStatus::STATUS_STOP
*/
int get_status() { return status_; }
private:
// 声明当前位置
float current_pose_ = 0.0;
// 目标距离
float target_pose_ = 0.0;
int status_ = example_ros2_interfaces::msg::RobotStatus::STATUS_STOP;
};
class ExampleInterfacesRobot : public rclcpp::Node {
public:
ExampleInterfacesRobot(std::string name) : Node(name) {
RCLCPP_INFO(this->get_logger(), "节点已启动:%s.", name.c_str());
/*创建move_robot服务*/
move_robot_server_ = this->create_service<example_ros2_interfaces::srv::MoveRobot>(
"move_robot", std::bind(&ExampleInterfacesRobot::handle_move_robot, this, std::placeholders::_1, std::placeholders::_2));
/*创建发布者*/
robot_status_publisher_ = this->create_publisher<example_ros2_interfaces::msg::RobotStatus>("robot_status", 10);
/*创建一个周期为500ms的定时器*/
timer_ = this->create_wall_timer(std::chrono::milliseconds(500), std::bind(&ExampleInterfacesRobot::timer_callback, this));
}
private:
Robot robot; /*实例化机器人*/
rclcpp::TimerBase::SharedPtr timer_; /*定时器,用于定时发布机器人位置*/
rclcpp::Service<example_ros2_interfaces::srv::MoveRobot>::SharedPtr move_robot_server_; /*移动机器人服务*/
rclcpp::Publisher<example_ros2_interfaces::msg::RobotStatus>::SharedPtr robot_status_publisher_; /*发布机器人位姿发布者*/
/**
* @brief 500ms 定时回调函数,
*
*/
void timer_callback() {
// 创建消息
example_ros2_interfaces::msg::RobotStatus message;
message.status = robot.get_status();
message.pose = robot.get_current_pose();
RCLCPP_INFO(this->get_logger(), "Publishing: %f", robot.get_current_pose());
// 发布消息
robot_status_publisher_->publish(message);
};
/**
* @brief 收到话题数据的回调函数
*
* @param request 请求共享指针,包含移动距离
* @param response 响应的共享指针,包含当前位置信息
*/
void handle_move_robot(const std::shared_ptr<example_ros2_interfaces::srv::MoveRobot::Request> request,
std::shared_ptr<example_ros2_interfaces::srv::MoveRobot::Response> response) {
RCLCPP_INFO(this->get_logger(), "收到请求移动距离:%f,当前位置:%f", request->distance, robot.get_current_pose());
robot.move_distance(request->distance);
response->pose = robot.get_current_pose();
};
};
int main(int argc, char** argv) {
rclcpp::init(argc, argv);
auto node = std::make_shared<ExampleInterfacesRobot>("example_interfaces_robot_01");
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
编译运行节点
colcon build --packages-up-to example_interfaces_rclcpp
控制端
source install/setup.bash
ros2 run example_interfaces_rclcpp example_interfaces_control_01
服务端
source install/setup.bash
ros2 run example_interfaces_rclcpp example_interfaces_robot_01
相关文章:
ROS2开发机器人移动
.创建功能包和节点 这里我们设计两个节点 example_interfaces_robot_01,机器人节点,对外提供控制机器人移动服务并发布机器人的状态。 example_interfaces_control_01,控制节点,发送机器人移动请求,订阅机器人状态话题…...

【强化学习】第02期:动态规划方法
笔者近期上了国科大周晓飞老师《强化学习及其应用》课程,计划整理一个强化学习系列笔记。笔记中所引用的内容部分出自周老师的课程PPT。笔记中如有不到之处,敬请批评指正。 文章目录 2.1 动态规划:策略收敛法/策略迭代法2.2 动态规划…...
)
安全技术和防火墙(二)
接上一节 备份和还原 iptables-save > /opt/iptables.bak iptables-restore < /opt/iptables.bak snat和dnat snat源地址转换 内网到外网 内网ip转换成可以访问外网的ip 内网的多个主机可以只有一个有效的公网ip地址访问外部网络 dnat 目的地址转发 外部用户&#…...
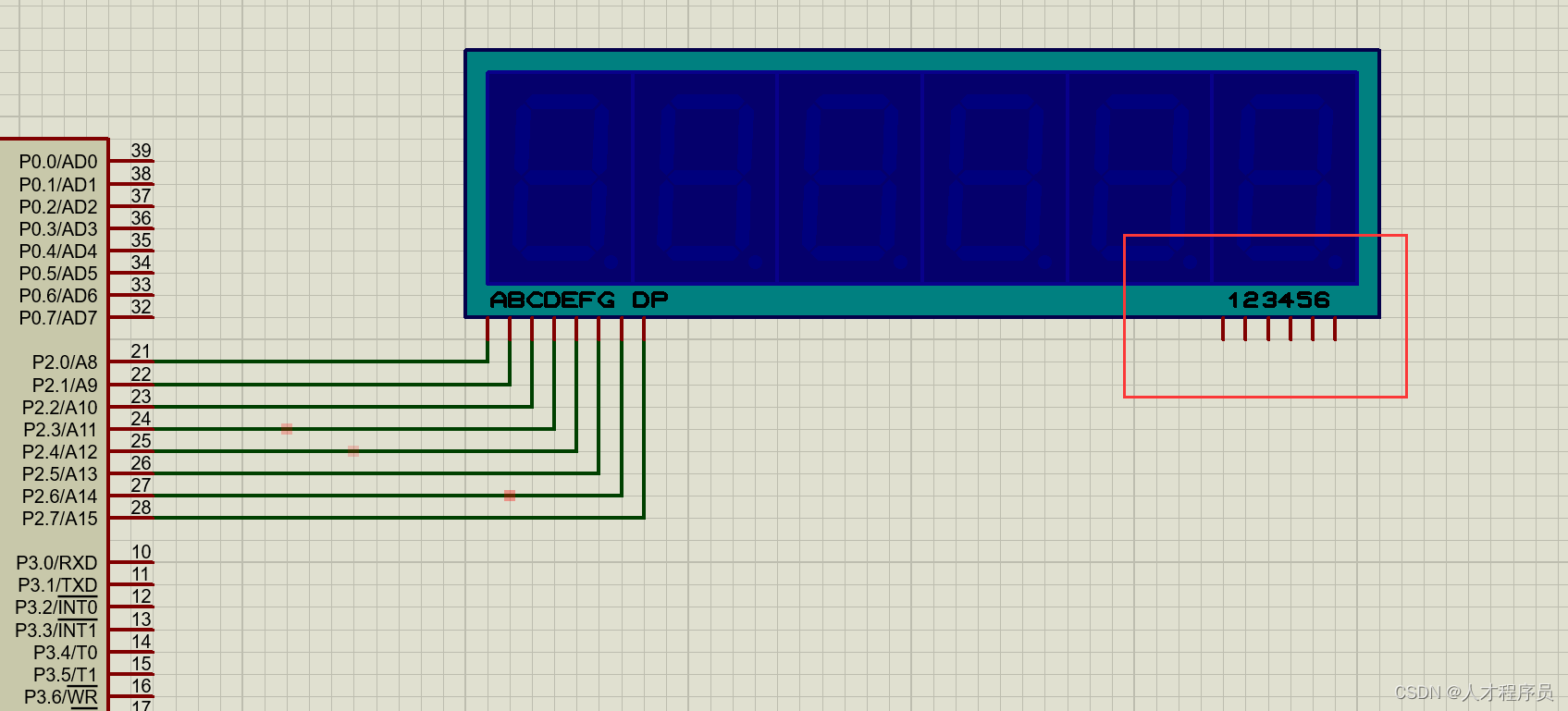
【51单片机入门】数码管原理
文章目录 前言共阴极与共阳极数码管多个数码管显示原理 总结 前言 在我们的日常生活中,数码管被广泛应用于各种电子设备中,如电子表、计时器、电子钟等。数码管的主要功能是显示数字和一些特殊字符。在这篇文章中,我们将探讨数码管的工作原理…...

三星DRAM、NAND,“又双叒叕”带头涨价了
据韩国媒体《每日经济新闻》报道,三星电子计划在第三季度上调服务器DRAM和企业级NAND闪存的价格,涨幅预计在15%-20%,主要受人工智能(AI)需求激增的推动。这一举措有望提振公司下半年业绩。 据《经济日报》报道援引业内消息,由于厂…...

星戈瑞FITC-PEG2000-Biotin的生物相容性
生物相容性是指材料与生物体之间相互作用时,材料对生物体无毒、无刺激,且能够被生物体接受并正常发挥其功能的特性。 FITC-PEG2000-Biotin作为一种荧光标记试剂,在细胞成像、药物传递和生物标志物检测等领域具有诸多应用前景。 FITC-PEG2000…...

数据资产管理的艺术:构建智能化、精细化的数据资产管理体系,从数据整合、分析到决策支持,为企业提供一站式的数据资产解决方案,助力企业把握数字时代的新机遇
一、引言 在数字化浪潮席卷全球的今天,数据已经成为企业最重要的资产之一。如何高效、安全地管理这些海量数据,从中提取有价值的信息,并将其转化为决策支持,是每个企业都必须面对的挑战。本文将探讨数据资产管理的艺术࿰…...

基于Java微信小程序校园自助打印系统设计和实现(源码+LW+调试文档+讲解等)
💗博主介绍:✌全网粉丝10W,CSDN作者、博客专家、全栈领域优质创作者,博客之星、平台优质作者、专注于Java、小程序技术领域和毕业项目实战✌💗 🌟文末获取源码数据库🌟感兴趣的可以先收藏起来,还…...

股票复盘思路
股票复盘是一个回顾和分析市场及个人交易决策的过程,旨在从过去的表现中学习并优化未来的投资策略。以下是一些基本的股票复盘步骤和关注点: 市场概况回顾: 观察并记录每日市场的整体表现,包括大盘指数涨跌、成交量变化。统计涨停和跌停个股的数量,了解市场情绪和活跃度。…...
摄像机)
OpenGL系列(六)摄像机
在 OpenGL系列(六)变换 中,一个目标物体经过模型矩阵、观察矩阵和投影矩阵的变换才能正常显示出来,其中模型矩阵主要针对目标物体,它会影响物体的位姿。观察矩阵和投影矩阵主要针对观察者而已,这两个变换决…...

一个端口配置两个vue和后端服务,nginx以及前后端服务怎么配?
nginx配置重点看server中的内容: worker_processes 8; pid /usr/local/nginx/logs/nginx.pid;events {# 此为 Linux 系统特为处理大批量文件描述符而作改进的 poll 事件模型use epoll;worker_connections 512; # 工作进程的最大连接数量# 允许同时接受多个网络连…...
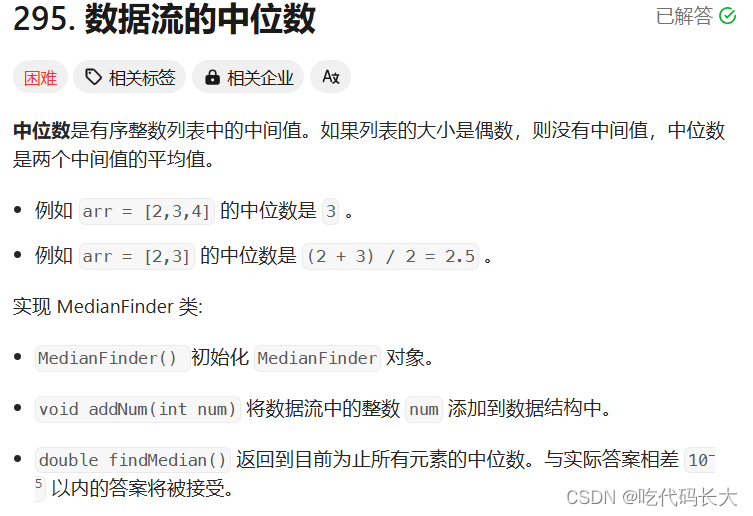
295. 数据流的中位数
class MedianFinder {Queue<Integer> A,B;public MedianFinder() {A new PriorityQueue<>();//小根堆存储后半部分B new PriorityQueue<>((x,y)->(y-x));//大根堆存储前半部分}public void addNum(int num) {if(A.size()0 && B.size()0){B.add(…...
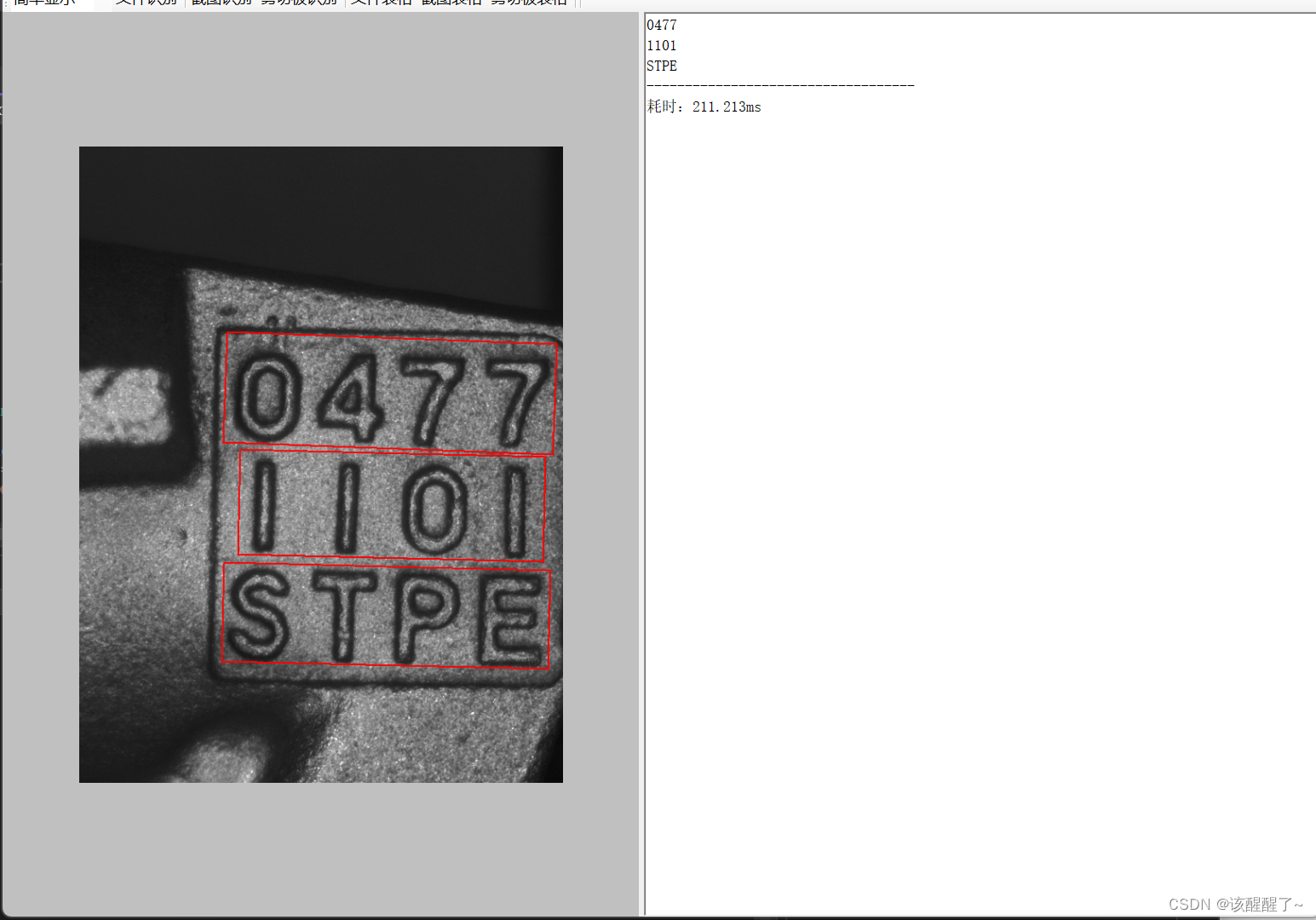
OCR训练和C#部署英文字符训练
PaddleOCR是一个基于飞桨开发的OCR(Optical Character Recognition,光学字符识别)系统。其技术体系包括文字检测、文字识别、文本方向检测和图像处理等模块。以下是其优点: 高精度:PaddleOCR采用深度学习算法进行训练…...
webpack【实用教程】
基础配置 配置的拆分和合并 通常 webpack 的配置文件会有3个 webpack.common.js 公共配置(会被另外两个配置文件导入并合并)webpack.dev.js 开发环境的配置webpack.prod.js 生产环境的配置 开发环境的本地服务 在 webpack.dev.js 中配置 devServer:…...

如何使用C++进行文件读写操作
在C中,我们可以使用标准库中的 <fstream>(文件流)来进行文件的读写操作。以下是一些基本的文件读写操作的示例。 读取文件 cpp复制代码 #include <fstream> #include <iostream> #include <string> int main() { s…...

Tensorflow Lite移动平台编译
Android平台编译 如果不做定制化操作,我们不需要自己编译TensorFlow Lite Android库。我们可以直接使用位于MavenCentral的TensorFlow Lite AAR。但是在某些情况下,我们需要本地编译TensorFlow Lite。例如,您可能正在构建一个包含operations selected from TensorFlow的自定…...
)
2024年6月24日-6月30日(ue5肉鸽视频p16-p25)
试过重点放在独立游戏上,有个indienova独立游戏团队是全职的,由于他们干了几个月,节奏暂时跟不上,紧张焦虑了。五一时也有点自暴自弃了,实在没必要,按照自己的节奏走即可。精力和时间也有限,放在…...

LeetCode.面试题17.24.最大子矩阵详解
问题描述 给定一个正整数、负整数和 0 组成的 N M 矩阵,编写代码找出元素总和最大的子矩阵。 返回一个数组 [r1, c1, r2, c2],其中 r1, c1 分别代表子矩阵左上角的行号和列号,r2, c2 分别代表右下角的行号和列号。若有多个满足条件的子矩阵…...

云动态摘要 2024-06-28
给您带来云厂商的最新动态,最新产品资讯和最新优惠更新。 最新优惠与活动 [新客专享]WeData 限时特惠 腾讯云 2024-06-21 数据分类分级管理,构建数据安全屏障 ,仅需9.9元! 云服务器ECS试用产品续用 阿里云 2024-04-14 云服务器…...
六、资产安全—信息分级资产管理与隐私保护(CISSP)
目录 1.信息分级 2.信息分级方法 3.责任的层级 4.资产管理 5.隐私数据管理角色 6.数据安全控制 7.数据保护方案 8.使用安全基线 六、资产安全—数据管理(CISSP): 五、身份与访问管理—身份管理和访问控制管理(CISSP): 1.信息分级 信息分级举列: 2.信息分级方…...

从机械奇观到数字逻辑:FPGA设计中的状态机与系统思维
1. 项目概述:当鲁布戈德堡机械遇见数字逻辑的灵魂我的一位老朋友杰伊道林最近给我分享了两段视频,看完之后,我的第一反应是“袜子都要被震飞了”——这让我认真考虑,是不是该换双带松紧带的袜子。这两段视频,一段是森林…...

电子设计协同:跨团队互联规划工具的应用与优化
1. 跨团队互联规划:电子设计协同的破局之道在当今高度复杂的电子系统设计中,芯片(IC)、封装(Package)和印刷电路板(PCB)三大设计团队的协同工作已成为决定产品成败的关键因素。传统设计流程中,这三个团队往往各自为政,通过Excel表…...

Kotlin多平台集成OpenAI API:类型安全与协程流式处理实践
1. 项目概述:当Kotlin遇见OpenAI如果你是一名Android或Kotlin多平台(KMP)开发者,最近想在自己的应用中集成AI对话、图像生成或者语音转文本这类酷炫功能,那么你大概率绕不开OpenAI的API。但当你兴冲冲地打开官方文档&a…...

ARM调试状态与Halting Step机制详解
1. ARM调试状态机制深度解析在嵌入式系统开发中,调试功能的重要性不言而喻。ARM架构提供了一套完整的调试机制,其中调试状态(Debug State)是核心组成部分。当处理器进入调试状态时,会暂停正常程序执行,将控…...

CAPL脚本中数据类型转换的实战解析:ASCII数组与字符串的精准互转
1. 为什么需要ASCII数组与字符串互转 在汽车电子测试领域,我们经常需要处理各种数据格式的转换。比如ECU返回的报文可能是以ASCII数组形式呈现的,而我们需要将其转换为可读的字符串进行分析;反过来,当我们需要发送特定指令时&…...

绕过Cursor AI消费限额前端Bug:浏览器控制台脚本实现API直接管理
1. 项目概述与背景 最近在深度使用Cursor这款AI代码编辑器时,遇到了一个挺让人头疼的问题。Cursor的付费模式是典型的用量计费,也就是所谓的“按需付费”,这对于我们这些高频使用者来说,确实需要设置一个消费上限,以防…...

OptiSearch:浏览器扩展实现AI与搜索引擎的无缝集成
1. 项目概述:当搜索遇到AI,一次查询,双重答案作为一名长期在信息检索和效率工具领域折腾的开发者,我一直在思考一个问题:我们每天在搜索引擎和AI聊天机器人之间要切换多少次标签页?搜索一个技术问题&#x…...

为什么93%的DeepSeek PR被拒?揭秘CI流水线自动拦截的4类“伪Clean”代码陷阱
更多请点击: https://intelliparadigm.com 第一章:为什么93%的DeepSeek PR被拒?揭秘CI流水线自动拦截的4类“伪Clean”代码陷阱 DeepSeek 开源仓库的 CI 流水线以严苛著称——最新统计显示,93% 的 PR 在 pre-commit 阶段即被自动…...

管 Vibe Coding 项目,就像管公共厕所
本文整理自"AI炼金术"播客对徐文浩的访谈,探讨 AI 辅助编程(Vibe Coding)在组织落地后面临的治理挑战和应对策略。从"屎山三年一遇"到"屎山月月有"传统软件开发中,一个系统的"屎山化"通常…...

革命性AI图像生成工具Fooocus:让创意触手可及的完整解决方案
革命性AI图像生成工具Fooocus:让创意触手可及的完整解决方案 【免费下载链接】Fooocus Focus on prompting and generating 项目地址: https://gitcode.com/GitHub_Trending/fo/Fooocus 你是否曾经被复杂的AI绘画工具吓退?Fooocus正是为你打造的解…...