14 卡尔曼滤波及代码实现
文章目录
- 14 卡尔曼滤波及代码实现
- 14.0 基本概念
- 14.1 公式推导
- 14.2 代码实现
14 卡尔曼滤波及代码实现
14.0 基本概念
卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
通俗来说就是,线性数学模型算出预测值+传感器测量值=更准确的测量值。根据数学模型,由第 k k k 时刻的值递推得到第 k + 1 k+1 k+1 时刻的预测值,结合第 k + 1 k+1 k+1 时刻的观测值,得到第 k + 1 k+1 k+1 时刻更精准的值。
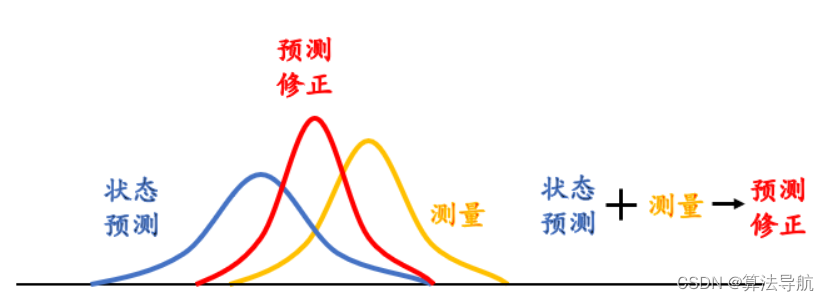
卡尔曼滤波主要用于 线性高斯系统。
14.1 公式推导
(1)线性高斯系统表达
状态方程:
x k = A x k − 1 + B u k + w k \boldsymbol{x}_k = \boldsymbol{A}\boldsymbol{x}_{k-1}+\boldsymbol{B}\boldsymbol{u}_k+\boldsymbol{w}_k xk=Axk−1+Buk+wk
观测方程:
z k = H x k + v k \boldsymbol{z}_k = \boldsymbol{H}\boldsymbol{x}_k+\boldsymbol{v}_k zk=Hxk+vk
其中, x k \boldsymbol{x}_k xk 为状态量, z k \boldsymbol{z}_k zk 为观测量, A \boldsymbol{A} A 为状态转移矩阵, B k \boldsymbol{B}_k Bk 为控制输入矩阵, H \boldsymbol{H} H 为状态观测矩阵。
w k \boldsymbol{w}_k wk 是过程噪声,服从高斯分布, w k \boldsymbol{w}_k wk 是观测噪声,也服从高斯分布,即:
w k ∼ N ( 0 , Q ) \boldsymbol{w}_k \sim N(0, \boldsymbol{Q}) wk∼N(0,Q)
v k ∼ N ( 0 , R ) \boldsymbol{v}_k \sim N(0, \boldsymbol{R}) vk∼N(0,R)
其中 Q \boldsymbol{Q} Q 是过程噪声的协方差, R \boldsymbol{R} R 是观测噪声的协方差。
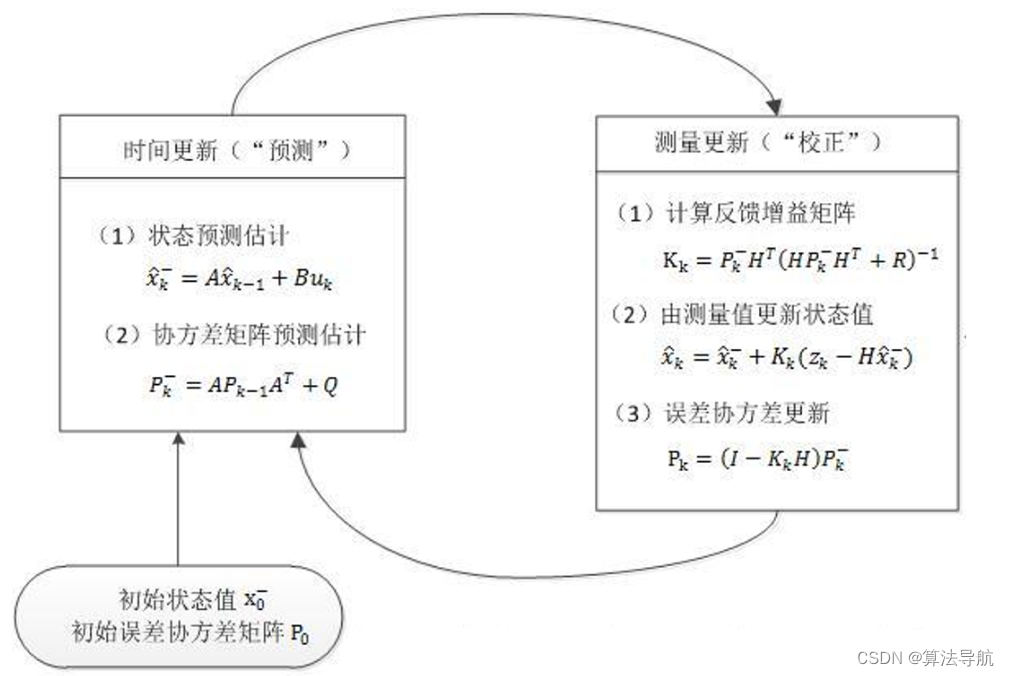
卡尔曼滤波包括预测和更新两步。
(2)预测(先验)
预测是根据上一时刻的状态量,由状态方程预测出下一时刻的状态量 x ^ k − \hat{\boldsymbol{x}}_k^{-} x^k− ,以及状态量误差协方差的先验估计矩阵 P k − \boldsymbol{P}_k^{-} Pk−。这是没有加观测值的。
x ^ k − = A x ^ k − 1 + B u k \hat{\boldsymbol{x}}_k^{-} = \boldsymbol{A}\hat{\boldsymbol{x}}_{k-1}+\boldsymbol{B}\boldsymbol{u}_k x^k−=Ax^k−1+Buk
P k − = A P k − 1 A T + Q \boldsymbol{P}_k^{-}=\boldsymbol{AP}_{k-1}\boldsymbol{A}^T+\boldsymbol{Q} Pk−=APk−1AT+Q
其中, A x ^ k − 1 \boldsymbol{A}\hat{\boldsymbol{x}}_{k-1} Ax^k−1 是上一时刻的最优估计。
(3)更新(后验)
加入观测,对预测值进行更新校正,得到最优后验估计。
首先计算增益矩阵
K k = P k − H T ( H P k − H T + R ) − 1 \boldsymbol{K}_k=\boldsymbol{P}_k^{-}\boldsymbol{H}^T(\boldsymbol{H}\boldsymbol{P}_k^{-}\boldsymbol{H}^T+\boldsymbol{R})^{-1} Kk=Pk−HT(HPk−HT+R)−1
更新状态量及其协方差矩阵
x ^ k = x ^ k − + K k ( z k − H x ^ k − ) \hat{\boldsymbol{x}}_k = \hat{\boldsymbol{x}}_k^{-} + \boldsymbol{K}_k(\boldsymbol{z}_k-\boldsymbol{H}\hat{\boldsymbol{x}}_k^{-}) x^k=x^k−+Kk(zk−Hx^k−)
P k = ( I − K k H ) P k − \boldsymbol{P}_k=(\boldsymbol{I}-\boldsymbol{K}_k\boldsymbol{H})\boldsymbol{P}_k^{-} Pk=(I−KkH)Pk−
14.2 代码实现
以雷达追踪目标为背景,系统的状态方程为
[ x y V x V y a x a y ] k + 1 = [ 1 0 δ t 0 0.5 δ t 2 0 0 1 0 δ t 0 0.5 δ t 2 0 0 1 0 δ t 0 1 0 0 1 0 δ t 0 0 0 0 1 0 0 0 0 1 0 1 ] [ x y V x V y a x a y ] k \begin{bmatrix}x\\y\\Vx\\Vy\\ax\\ay\end{bmatrix}_{k+1}=\begin{bmatrix}1&0&\delta_t&0&0.5\delta_t^2&0\\0&1&0&\delta_t&0&0.5\delta_t^2\\0&0&1&0&\delta_t&0\\1&0&0&1&0&\delta_t\\0&0&0&0&1&0\\0&0&0&1&0&1\end{bmatrix}\begin{bmatrix}x\\y\\Vx\\Vy\\ax\\ay\end{bmatrix}_k xyVxVyaxay k+1= 100100010000δt010000δt01010.5δt20δt01000.5δt20δt01 xyVxVyaxay k
观测方程
[ x y ] k + 1 = [ 1 0 0 0 0 0 0 1 0 0 0 0 ] [ x y V x V y a x a y ] k \begin{bmatrix}x\\y\end{bmatrix}_{k+1}=\begin{bmatrix}1&0&0&0&0&0\\0&1&0&0&0&0\end{bmatrix}\begin{bmatrix}x\\y\\Vx\\Vy\\ax\\ay\end{bmatrix}_k [xy]k+1=[100100000000] xyVxVyaxay k
/*********************************************************** *
* Time: 2023/11/26
* Author: xiaocong
* Function: 卡尔曼滤波
***********************************************************/
#ifndef KALMANFILTER_H
#define KALMANFILTER_H#include <eigen3/Eigen/Dense>
#include <iostream>using namespace Eigen;
using namespace std;class KalmanFilter
{
public:KalmanFilter(int stateSize, int measSize, int uSize); // 构造函数void init(VectorXd& x, MatrixXd& P, MatrixXd& R, MatrixXd& Q); // 初始化void predict(MatrixXd& A);void predict(MatrixXd& A, MatrixXd& B, VectorXd& u); // 重载,针对有控制输入的情况VectorXd update(MatrixXd& H, VectorXd z_meas); // 更新~KalmanFilter(); // 析构函数private:VectorXd x_; // 状态变量VectorXd z_; // 观测变量MatrixXd A_; // 状态转移矩阵MatrixXd B_; // 控制矩阵VectorXd u_; // 控制变量MatrixXd P_; // 状态值的协方差矩阵MatrixXd H_; // 观测矩阵MatrixXd R_; // 观测噪声协方差矩阵MatrixXd Q_; // 过程噪声协方差矩阵
};#endif //KALMANFILTER_H
#include "../inlude/KalmanFilter.h"// 构造函数
KalmanFilter::KalmanFilter(int stateSize, int measSize, int uSize)
{if (stateSize == 0 || measSize == 0){std::cerr << "Error, State size and measurement size must bigger than 0" << endl;}x_.resize(stateSize);x_.setZero();A_.resize(stateSize, stateSize);A_.setIdentity();u_.resize(uSize);u_.setZero();B_.resize(stateSize, uSize);B_.setZero();P_.resize(stateSize, stateSize);P_.setIdentity();H_.resize(measSize, stateSize);H_.setZero();Q_.resize(stateSize, stateSize);Q_.setIdentity();R_.resize(measSize, measSize);R_.setIdentity();
}void KalmanFilter::init(VectorXd& x, MatrixXd& P, MatrixXd& R, MatrixXd& Q)
{x_ = x;P_ = P;R_ = R;Q_ = Q;
}void KalmanFilter::predict(MatrixXd& A) // 没有控制输入u
{A_ = A;x_ = A * x_;P_ = A_ * P_ * A_.transpose() + Q_;
}void KalmanFilter::predict(MatrixXd& A, MatrixXd& B, VectorXd& u) // 有控制输入u
{A_ = A;B_ = B;u_ = u;x_ = A * x_ + B * u_;P_ = A_ * P_ * A_.transpose() + Q_;
}VectorXd KalmanFilter::update(MatrixXd& H, VectorXd z_meas) // 更新
{H_ = H;MatrixXd temp = H_ * P_ * H_.transpose() + R_;MatrixXd K = P_ * H_.transpose() * temp.inverse();x_ = x_ + K * (z_meas - H_ * x_); // 更新 x_kMatrixXd I = MatrixXd::Identity(x_.rows(), x_.rows());P_ = (I - K * H_) * P_;return x_;
}KalmanFilter::~KalmanFilter()
{}
#include "../inlude/KalmanFilter.h"
#include <fstream>#define N 1000
#define T 0.01double data_x[N], data_y[N];// 模型函数
double sample(double x0, double v0, double acc, double t)
{return x0 + v0 * t + 0.5 * acc * t * t;
}double getRand()
{return 0.5 * rand() / RAND_MAX - 0.25; //[-0.25, 0.25)
}int main()
{ofstream fout;fout.open("../data/data.txt");// 生成观测值double t;for (int i = 0; i < N; i++){t = T * i;data_x[i] = sample(0, -4.0, 0.1, t) + getRand();data_y[i] = sample(0.1, 2.0, 0, t) + getRand();}int stateSize = 6;int measSize = 2;int uSize = 0;KalmanFilter kf(stateSize, measSize, uSize);Eigen::MatrixXd A(stateSize, stateSize);A << 1, 0, T, 0, 1 / 2 * T * T, 0,0, 1, 0, T, 0, 1 / 2 * T * T,0, 0, 1, 0, T, 0,0, 0, 0, 1, 0, T,0, 0, 0, 0, 1, 0,0, 0, 0, 0, 0, 1;Eigen::MatrixXd B(0, 0);Eigen::MatrixXd H(measSize, stateSize);H << 1, 0, 0, 0, 0, 0,0, 1, 0, 0, 0, 0;Eigen::MatrixXd P(stateSize, stateSize);P.setIdentity();Eigen::MatrixXd R(measSize, measSize);R.setIdentity() * 0.01;Eigen::MatrixXd Q(stateSize, stateSize);Q.setIdentity() * 0.001;Eigen::VectorXd x(stateSize);Eigen::VectorXd u(0);Eigen::VectorXd z_meas(measSize);z_meas.setZero();Eigen::VectorXd res(stateSize); // 存储预测结果for (int i = 0; i < N; i++){if (i == 0) // 初始值{x << data_x[i], data_y[i], 0, 0, 0, 0;kf.init(x, P, R, Q);continue;}kf.predict(A); // 预测z_meas << data_x[i], data_y[i]; // 观测res << kf.update(H, z_meas); // 更新fout << data_x[i] << " " << data_y[i] << " " << res[0] << " " << res[1] << " " << res[2] << " " << res[3] << " " << res[4] << " " << res[5] << endl;}fout.close();return 0;}
相关文章:
14 卡尔曼滤波及代码实现
文章目录 14 卡尔曼滤波及代码实现14.0 基本概念14.1 公式推导14.2 代码实现 14 卡尔曼滤波及代码实现 14.0 基本概念 卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据包括系统中的噪声和…...
计算机视觉 图像融合技术概览
在许多计算机视觉应用中(例如机器人运动和医学成像),需要将来自多幅图像的相关信息集成到一幅图像中。这种图像融合将提供更高的可靠性、准确性和数据质量。 多视图融合可以提高图像的分辨率,同时恢复场景的 3D 表示。多模态融合结合了来自不同传感器的图像,称为多传感器融…...
计算机网络课程实训:局域网方案设计与实现(基于ensp)
文章目录 前言基本要求操作分公司1分公司2总部核心交换机配置实现内部服务器的搭建acl_deny部分用户与服务器出口出口防火墙配置 前言 本篇文章是小编实训部分内容,内容可能会有错误,另外ensp对电脑兼容性及其挑剔,在使用之前一定要安装好。…...
【安全开发】内网扫描器
文章目录 前言现实现的功能较少后序开发会逐步加入简单漏洞探探测和代理功能。 一、开发过程1.项目结构2.main.go3.core模块3.1 scanner.go3.2 service.go 4.bruteforc4.1 bruteforce.go 二、使用步骤 前言 为什么要写这个? fscna被杀的概率太高(哪天二…...
)
ESP32-C3模组上跑通MQTT(5)
接前一篇文章:ESP32-C3模组上跑通MQTT(4) 本文内容参考: 《ESP32-C3 物联网工程开发实战》 一分钟了解MQTT协议 ESP32 MQTT API指南-CSDN博客 ESP-IDF MQTT 示例入门_mqtt outbox-CSDN博客 ESP32用自签CA进行MQTT的TLS双向认证通信_esp32 mqtt ssl-CSDN博客 特此致谢!…...
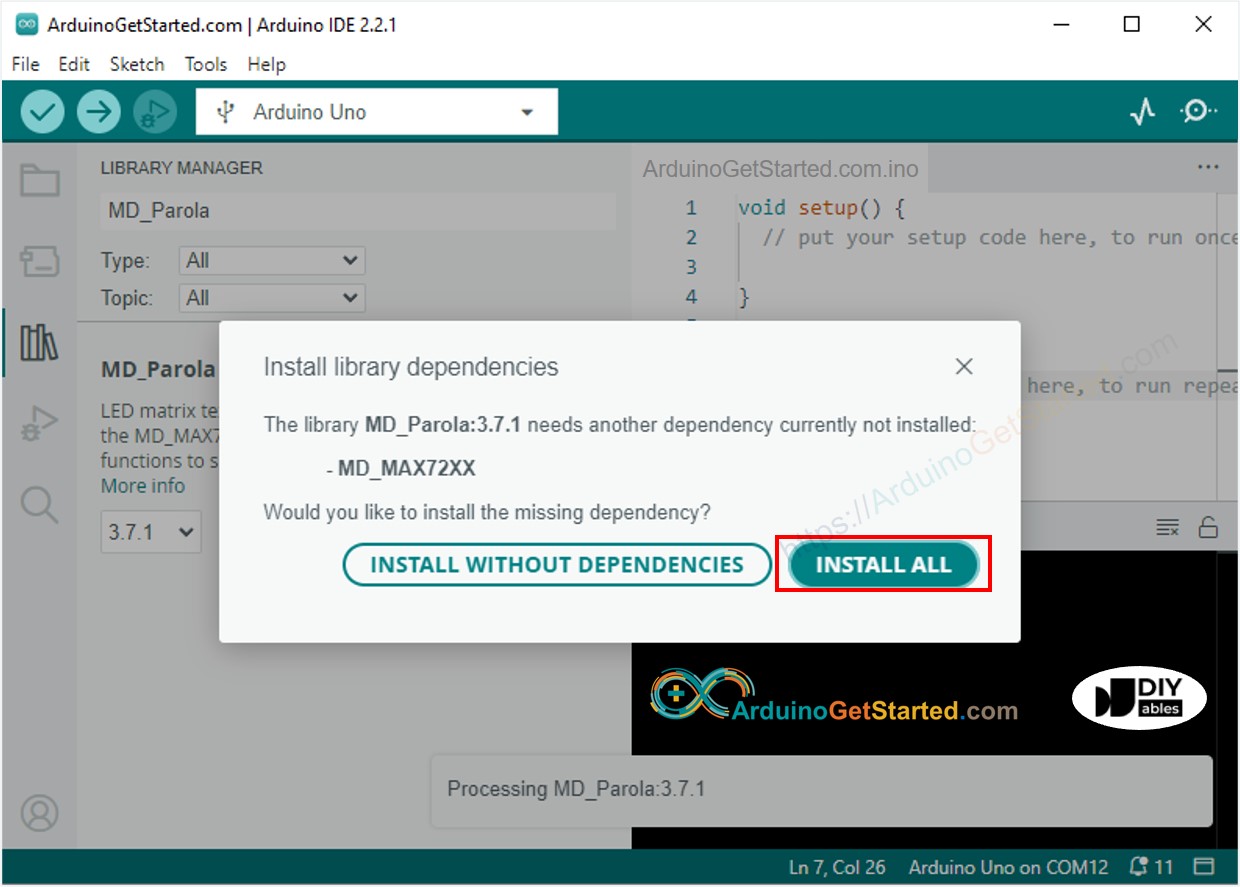
Arduino - LED 矩阵
Arduino - LED 矩阵 Arduino - LED Matrix LED matrix display, also known as LED display, or dot matrix display, are wide-used. In this tutorial, we are going to learn: LED矩阵显示器,也称为LED显示器,或点阵显示器,应用广泛。在…...
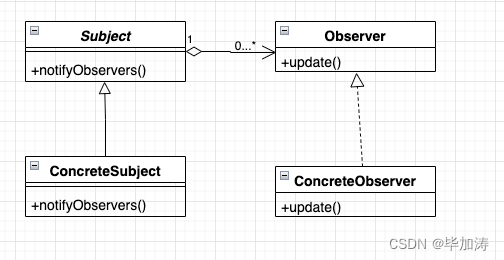
设计模式 - Observer Pattern 观察者模式
文章目录 定义观察者模式的实现构成构成UML图 观察者模式的代码实现场景代码实现 总结优点缺点应用场景 其他设计模式文章: 定义 观察者模式是行为型模式的一种,它定义对象间的一种一对多的依赖关系,使得每当一个对象改变状态,它…...

【面试系列】C++ 高频面试题
欢迎来到我的博客,很高兴能够在这里和您见面!欢迎订阅相关专栏: ⭐️ 全网最全IT互联网公司面试宝典:收集整理全网各大IT互联网公司技术、项目、HR面试真题. ⭐️ AIGC时代的创新与未来:详细讲解AIGC的概念、核心技术、…...

程序猿大战Python——实现简单的图书馆系统操作
步骤1:安装和导入库 首先,确保已经安装了 pymysql 库。如果没有安装,请执行以下命令: pip install pymysql 然后,导入必要的库: import pymysql 步骤2:创建数据库和表的函数 编写一个函数来…...

液体粒子计数器的原理及常见型号选择 lighthouse代理商北京中邦兴业
液体颗粒计数用于测量液体样品中颗粒的大小和分布。通过用激光二极管照射液体样品并检测散射光来测量颗粒分布和尺寸。散射光的性质与粒子大小的大小有关。液体颗粒计数器可用于批量取样或在线(连续监测)应用,如水处理厂,或用于…...

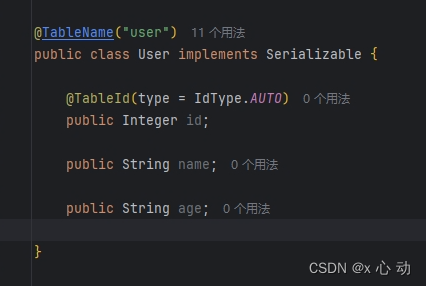
Java知识点整理 16 — Spring Bean
在之前的文章 Java知识点整理 8 — Spring 简介 中介绍了 Spring 的两大核心概念 IoC 和 AOP,但对 Spring Bean 的介绍不全面,本文将补充 Spring 中 Bean 的概念。 一. 什么是 Spring Bean 在 Spring 官方文档中,对 bean 的定义为…...

Nvidia Jetson/RK3588+AI双目立体相机,适合各种割草机器人、扫地机器人、AGV等应用
双目立体视觉是基于视差原理,依据成像设备从不同位置获取的被测物体的图像,匹配对应点的位置偏移,得到视差数据,进而计算物体的空间三维信息。为您带来高图像质量的双目立体相机,具有高分辨率、低功耗、远距离等优点&a…...

springboot使用feign调用不依赖cloud
在使用spring boot调用第三方api中,常用的是okhttp、apache http client等,但是直接使用下来还是有点繁琐,需要手动转换实体。 在springcloud中有个openfeign调用,第一次体验到调用接口还能这么丝滑。注解写道接口上,…...
springboot中使用springboot cache
前言:SpringBoot中使用Cache缓存可以提高对缓存的开发效率 此图片是SpringBootCache常用注解 Springboot Cache中常用注解 第一步:引入依赖 <!--缓存--><dependency><groupId>org.springframework.boot</groupId><artifactId…...

Promise,async/await的运用
一,了解Promise Promise是异步编程的一种解决方案,它是一个对象,可以获取异步操作的消息,它的出现避免了地狱回调。 (1)Promise的实例有三个状态: Pending(进行中) Re…...

图论·多源最短路径Floyddijsktra
例题地址 多源最短路径 多个源点多个终点可以使用Floyd算法直接求各源点到终点的最短距离,也可以直接多次使用dijsktra算法求单源点到终点的最短距离 Floyd算法 使用条件 多源最短路径权值正负皆可 核心思想:动态规划 子问题: 设(A,B)…...
微服务 | Springboot整合GateWay+Nacos实现动态路由
1、简介 路由转发 执行过滤器链。 网关,旨在为微服务架构提供一种简单有效的统一的API路由管理方式。同时,基于Filter链的方式提供了网关的基本功能,比如:鉴权、流量控制、熔断、路径重写、黑白名单、日志监控等。 基本功能…...

做google SEO 有哪些好用的工具?这12款谷歌SEO工具值得收藏!
1、Google Trends 谷歌旗下一款基于搜索数据推出的一款免费分析工具 外贸人有句老话,七分靠选品,三分靠运营。在你开始做独立站之前,在你不清楚你的行业在Google上面能否有足够的流量时,那么Google Trends则是你最好的工具。 你只…...

【变频调速在锅炉引风机控制中的应用】
变频调速在锅炉引风机控制中的应用 变频器的选型 变频器是利用电力半导体器件的通断作用将工频电源变换为另一种频率的电能控制装置,能宏观对交流异步电机软启动,变频调速,提高运转精度,改变功率因数,过流/过压/过载保护等功能,国内技术较领先的品牌有汇川、欧瑞(原烟台…...

网络配置(IP、NETMASK、GATEWAY、DNS、DHCP) <持续更新中>
参考: 初学Linux之网络配置(IP、NETMASK、GATEWAY、DNS、DHCP)-CSDN博客【学习笔记】网关 & 路由_网关和路由-CSDN博客【学习笔记】计算机网络 IP地址与MAC地址_根据mac分配ip-CSDN博客【学习笔记】TCP 和 UDP 协议_tcp 发送 syn 应答没有syn ack-CSDN博客 一…...
)
AS5600磁编码器与STM32的闭环步进电机控制(硬件设计+软件滤波+减速比处理)
1. AS5600磁编码器与STM32的闭环控制方案设计 第一次接触AS5600磁编码器时,我被它12位分辨率、非接触式测量的特性吸引。相比传统光电编码器,这个指甲盖大小的芯片能直接输出数字信号,特别适合集成到步进电机系统中。当时为了给实验室的3D打印…...

避坑指南:R语言做交互效应分析时,你的p for Interaction算对了吗?
R语言交互效应分析:如何避免p值计算中的常见陷阱 在医学统计与流行病学研究中,交互效应分析是探索变量间复杂关系的重要工具。许多研究者在使用R语言进行逻辑回归分析时,常常对交互项的p值计算结果产生疑虑——这个关键指标是否真的反映了变量…...

CircuitPython库管理全攻略:从手动安装到CircUp工具实战
1. 项目概述:CircuitPython库管理的核心价值 如果你刚开始接触CircuitPython,可能会被一个看似简单的问题绊住:为什么我复制了别人的代码,板子却毫无反应,或者串口里报了一堆看不懂的错误?十有八九&#x…...

BilibiliDown实战指南:3大核心功能深度解析与高效下载方案
BilibiliDown实战指南:3大核心功能深度解析与高效下载方案 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirro…...

Claude与OpenClaw整合指南:AI代码生成与自动化执行实战
1. 项目概述与核心价值最近在开发者社区里,一个名为“Claude-Code-x-OpenClaw-Guide-Zh”的项目引起了我的注意。乍一看这个标题,可能有些朋友会觉得它像是一个普通的工具集合或者文档翻译。但当我深入探究其背后的代码仓库和社区讨论后,我发…...

终极Cookie本地导出指南:如何安全获取cookies.txt文件
终极Cookie本地导出指南:如何安全获取cookies.txt文件 【免费下载链接】Get-cookies.txt-LOCALLY Get cookies.txt, NEVER send information outside. 项目地址: https://gitcode.com/gh_mirrors/ge/Get-cookies.txt-LOCALLY 在Web开发、API测试和自动化脚本…...

复杂园区管控难?无感跨镜追踪打造全流程动态溯源方案
复杂园区管控难?无感跨镜追踪打造全流程动态溯源方案产业园区、科创园区、物流园区、化工园区等复杂场景,普遍存在点位分散、人员车流密集、动线繁杂、盲区死角多、安防设备数据割裂等管控难题。传统园区管理模式依赖人工巡检、单点监控查看、被动事后追…...

2026年津南区管道疏通门店大揭秘,这些亮点你知道吗?
在津南区,管道问题时常困扰着居民、商户和企业。随着城市的发展,对管道疏通服务的需求也日益增长。今天,就为大家揭秘2026年津南区一家备受瞩目的管道疏通门店——天津鸿运来管道疏通有限公司。一、全场景适配,服务无盲区鸿运来管…...

0-π量子比特保护机制与受控相位门设计
1. 0-π量子比特的物理实现与保护机制1.1 多模电路编码原理0-π量子比特是一种基于超导电路的多模编码量子比特,其核心设计理念是通过电路中的θ和φ两个非线性耦合模式来实现量子态的编码。这种双模编码结构使其相比传统单模超导量子比特(如transmon或f…...

33-47 树
33. 二叉树的中序遍历 class Solution(object):def inorderTraversal(self, root):res []self._inorder(root, res)return resdef _inorder(self, node, res):if node:self._inorder(node.left, res)res.append(node.val)self._inorder(node.right, res) 34. 二叉树的最大深…...