面向阿克曼移动机器人(自行车模型)的LQR(最优二次型调节器)路径跟踪方法
线性二次调节器(Linear Quadratic Regulator,LQR)是针对线性系统的最优控制方法。LQR 方法标准的求解体系是在考虑到损耗尽可能小的情况下, 以尽量小的代价平衡其他状态分量。一般情况下,线性系统在LQR 控制方法中用状态空间方程描述,性能能指标函数由二次型函数描述。
LQR 方法存在以下优点:
- 最小能量消耗和最高路径跟踪精度。
- 求解时能够考虑多状态情况。
- 鲁棒性较强。
缺点:
- 控制效果和模型精确程度有很大相关性。
- 实时计算状态反馈矩阵和控制增益。
一、系统模型
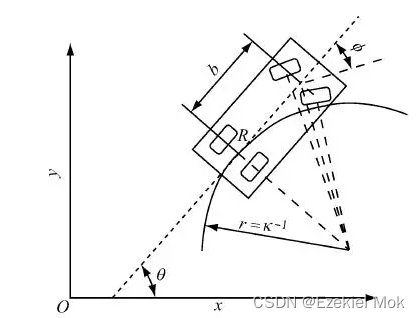
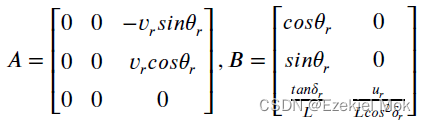
1.1 车辆模型
一般来说阿克曼移动机器人可以简化为自行车模型,是一个非线性时变系统,工程上一般通过在平衡点附近差分线性化转化为线性系统来分析和控制,具体就不推导了,我直接给出模型。

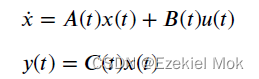
1.2 线性系统状态反馈控制示意图
状态反馈是线性能控线性系统镇定的一个有效方法,主要是通过极点配置方法寻找一组非正的闭环极点使得闭环系统大范围渐进稳定。
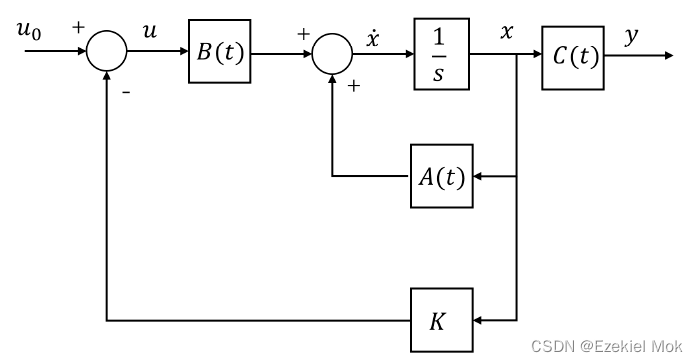
A,B,C分别代表系统矩阵、输入矩阵和输出矩阵,K是待设计的状态反馈增益。
二、控制器设计
2.1 代价函数泛函设计
最优控制里,代价函数一般设计为控制性能和控制代价的范数加权和,形式如下

其中,期望和实际的误差系统定义为
2.2 最优状态反馈控制律推导
当想要状态与期望状态之间的误差越差越小,同时控制消耗更少的能量。求解极小值点时,新定义拉格朗日函数如下

在拉格朗日函数基础上对各个优化变量的一阶导为零 ,得
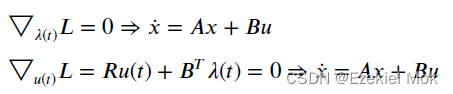
当时候,

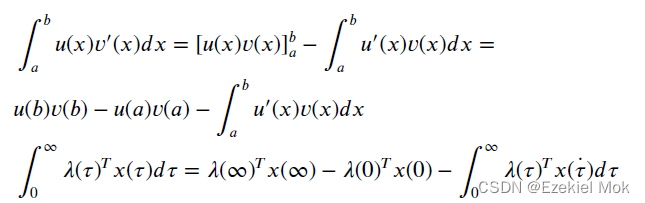
推导LQR控制律时候,设 ,求偏导后可得
由![]() 得
得
![]()
由于状态量初始不为零,只能是
![]()
又由于当上述方程成立时候,收敛到了期望的范围 ,
为零,因此得到立卡提方程形式的矩阵微分方程
![]()
综上,通过迭代或者近似方法求解上述立卡提方程后,最优的控制律为
![]()
2.3 连续立卡提方程求解流程
三、具体实现代码
3.1 main函数
close all
clear;
clc;
cx = [];
cy= [];
y0 = @(t_step) 10*sin(2 * t_step + 1);
x0_dot= @(t_step) 5 * 2 * cos(2 * t_step + 1);
x0 = @(t_step) -40*cos(t_step + 0.5);
for theta=0:pi/200:2*picx(end + 1) = x0(theta);cy(end + 1) = y0(theta);
end
refer_path_primary= [cx', cy'];
x = refer_path_primary(:, 1)';
y = refer_path_primary(:, 2)';
points = [x; y]';
ds = 0.1 ;%等距插值处理的间隔
distance = [0, cumsum(hypot(diff(x, 1), diff(y, 1)))]';
distance_specific = 0:ds:distance(end);
hypot(diff(x, 1), diff(y, 1));
diff(x, 1);
diff(y, 1);
s = 0:ds:distance(end);
refer_path= interp1(distance, points, distance_specific, 'spline');
figure(1)
% 绘制拟合曲线
plot(refer_path(:, 1), refer_path(:, 2),'b-',x, y,'r.');
hold on
refer_path_x = refer_path(:,1); % x
refer_path_y = refer_path(:,2); % y
for i=1:length(refer_path)if i==1dx = refer_path(i + 1, 1) - refer_path(i, 1);dy = refer_path(i + 1, 2) - refer_path(i, 2);ddx = refer_path(3, 1) + refer_path(1, 1) - 2 * refer_path(2, 1);ddy = refer_path(3, 2) + refer_path(1, 2) - 2 * refer_path(2, 2);elseif i==length(refer_path)dx = refer_path(i, 1) - refer_path(i - 1, 1);dy = refer_path(i, 2) - refer_path(i - 1, 2);ddx = refer_path(i, 1) + refer_path(i - 2, 1) - 2 * refer_path(i - 1, 1);ddy = refer_path(i, 2) + refer_path(i - 2, 2) - 2 * refer_path(i - 1, 2);elsedx = refer_path(i + 1, 1) - refer_path(i, 1);dy = refer_path(i + 1, 2) - refer_path(i, 2);ddx = refer_path(i + 1, 1) + refer_path(i - 1, 1) - 2 * refer_path(i, 1);ddy = refer_path(i + 1, 2) + refer_path(i - 1, 2) - 2 * refer_path(i, 2);endrefer_path(i,3)=atan2(dy, dx);%yawrefer_path(i,4)=(ddy * dx - ddx * dy) / ((dx ^ 2 + dy ^ 2) ^ (3 / 2));
end
figure(2)
plot(refer_path(:, 3),'b-');
figure(3)
plot(refer_path(:, 4),'b-')
%
%%目标及初始状态
L=2;%车辆轴距
v=2;%初始速度
dt=0.05;%时间间隔
goal=refer_path(end,1:2);
x_0=refer_path_x(1);
y_0=refer_path_y(1);
psi_0 = refer_path(1, 3);
% %运动学模型
ugv = KinematicModel(x_0, y_0, psi_0, v, dt, L);
Q = eye(3) * 3.0;
R = eye(2) * 2.0;
robot_state = zeros(4, 1);
step_points = length(refer_path(:, 1));
for i=1:1:step_pointsrobot_state(1)=ugv.x;robot_state(2)=ugv.y;robot_state(3)=ugv.psi;robot_state(4)=ugv.v;[e, k, ref_yaw, min_idx] = calc_track_error(robot_state(1), robot_state(2), refer_path);ref_delta = atan2(L * k, 1);[A, B] = state_space( robot_state(4), ref_delta, ref_yaw, dt, L);delta = lqr(robot_state, refer_path, min_idx, A, B, Q, R);delta = delta + ref_delta;[ugv.x, ugv.y, ugv.psi, ugv.v] = update(0, delta, dt, L, robot_state(1), robot_state(2),robot_state(3), robot_state(4));ugv.record_x(end + 1 ) = ugv.x;ugv.record_y(end + 1 ) = ugv.y;ugv.record_psi(end + 1 ) = ugv.psi;ugv.record_phy(end + 1 ) = ref_delta;
end
figure(4)
% 绘制拟合曲线
% scr_size = get(0,'screensize');
% set(gcf,'outerposition', [1 1 scr_size(4) scr_size(4)]);
plot(ugv.record_x , ugv.record_y, Color='m',LineStyle='--',LineWidth=2);
axis([-40,40,-40,40])
grid on
hold on
% 绘制车辆曲线
axis equal
for ii = 1:1:length(ugv.record_x)h = PlotCarbox(ugv.record_x(ii), ugv.record_y(ii), ugv.record_psi(ii), 'Color', 'r',LineWidth=2);h1 = plot(ugv.record_x(1:ii), ugv.record_y(1:ii),'Color', 'b');th1 = text(ugv.record_x(ii), ugv.record_y(ii)+10, ['#car', num2str(1)], 'Color', 'm');set(th1, {'HorizontalAlignment'},{'center'});h2 = PlotCarWheels(ugv.record_x(ii), ugv.record_y(ii), ugv.record_psi(ii),ugv.record_phy(ii),'k',LineWidth=2);h3 = plot(ugv.record_x(1:ii) , ugv.record_y(1:ii), Color='b',LineStyle='-',LineWidth=4);drawnowdelete(h); delete(h1);delete(th1);delete(h3);for jj = 1:1:size(h2)delete(h2{jj});end
end
%
function [P] = cal_Ricatti(A, B, Q, R)Qf = Q;P = Qf;iter_max = 100;Eps = 1e-4;for step = 1:1:iter_maxP_bar = Q + A' * P * A - A' * P * B * pinv(R + B' * P *B) * B' * P * A;criteria = max(abs(P_bar - P));if criteria < Epsbreak;endP = P_bar;endend
%%LQR控制器
function[u_star]=lqr(robot_state, refer_path, s0, A, B, Q, R)x = robot_state(1:3) - refer_path(s0,1:3)';P = cal_Ricatti(A, B, Q, R);K= -pinv(R + B' * P * B) * B' * P * A;u = K * x;%状态反馈u_star = u(2);
endfunction [e, k, yaw, min_idx]=calc_track_error(x, y, refer_path)p_num = length(refer_path);d_x = zeros(p_num, 1);d_y = zeros(p_num, 1);d = zeros(p_num, 1);for i=1:1:p_num d_x(i) = refer_path(i, 1) - x; d_y(i) = refer_path(i, 2) - y;endfor i=1:1:p_num d(i) = sqrt(d_x(i) ^2 + d_y(i) ^ 2) ;end[~, min_idx] = min(d); yaw = refer_path(min_idx, 3);k = refer_path(min_idx, 4);angle= normalize_angle(yaw - atan2(d_y(min_idx), d_x(min_idx)));e = d(min_idx);if angle < 0e = e*(-1);end
end
%%将角度取值范围限定为[-pi,pi]
function [angle]=normalize_angle(angle)while angle > piangle = angle - 2*pi;endwhile angle < piangle = angle + 2*pi;end
end
function [x_next, y_next, psi_next, v_next] = update(a, delta_f, dt, L, x, y, psi, v)x_next = x + v * cos(psi) * dt;y_next = y + v * sin(psi) * dt;psi_next = psi + v / L * tan(delta_f) * dt;v_next = v + a * dt;
end
function [A, B]=state_space(v, ref_delta, ref_yaw, dt, L)A=[ 1.0, 0.0, -v * dt * sin(ref_yaw);0.0, 1.0, v * dt * cos(ref_yaw);0.0, 0.0, 1.0 ];B =[ dt * cos(ref_yaw), 0;dt * sin(ref_yaw), 0;dt * tan(ref_delta) / L, v * dt / (L * cos(ref_delta) * cos(ref_delta))];
end
function h = PlotCarbox(x, y, theta, varargin)
Params = GetVehicleParams();carbox = [-Params.Lr -Params.Lb/2; Params.Lw+Params.Lf -Params.Lb/2; Params.Lw+Params.Lf Params.Lb/2; -Params.Lr Params.Lb/2];
carbox = [carbox; carbox(1, :)];transformed_carbox = [carbox ones(5, 1)] * GetTransformMatrix(x, y, theta)';
h = plot(transformed_carbox(:, 1), transformed_carbox(:, 2), varargin{:});end
function hs = PlotCarWheels(x, y, theta, phy, varargin)
Params = GetVehicleParams();wheel_box = [-Params.wheel_radius -Params.wheel_width / 2;+Params.wheel_radius -Params.wheel_width / 2;+Params.wheel_radius +Params.wheel_width / 2;-Params.wheel_radius +Params.wheel_width / 2];front_x = x + Params.Lw * cos(theta);
front_y = y + Params.Lw * sin(theta);
track_width_2 = (Params.Lb - Params.wheel_width / 2) / 2;boxes = {TransformBox(wheel_box, x - track_width_2 * sin(theta), y + track_width_2 * cos(theta), theta);TransformBox(wheel_box, x + track_width_2 * sin(theta), y - track_width_2 * cos(theta), theta);TransformBox(wheel_box, front_x - track_width_2 * sin(theta), front_y + track_width_2 * cos(theta), theta+phy);TransformBox(wheel_box, front_x + track_width_2 * sin(theta), front_y - track_width_2 * cos(theta), theta+phy);
};hs = cell(4, 1);
for ii = 1:4hs{ii} = fill(boxes{ii}(:, 1), boxes{ii}(:, 2), varargin{:});
endendfunction transformed = TransformBox(box, x, y, theta)
transformed = [box; box(1, :)];
transformed = [transformed ones(5, 1)] * GetTransformMatrix(x, y, theta)';
transformed = transformed(:, 1:2);
end
function mat = GetTransformMatrix(x, y, theta)
mat = [ ...cos(theta) -sin(theta), x; ...sin(theta) cos(theta), y; ...0 0 1];
end3.2 运动学结构体:
classdef KinematicModel<handlepropertiesx;y;psi;v;dt;L;record_x;record_y;record_psi;record_phy;endmethodsfunction self=KinematicModel(x, y, psi, v, dt, L)self.x=x;self.y=y;self.psi=psi;self.v = v;self.L = L;% 实现是离散的模型self.dt = dt;self.record_x = [];self.record_y= [];self.record_psi= [];self.record_phy= [];end
end
end四、仿真参数和效果
4.1 参数配置
%期望轨迹
y0 = @(t_step) 10*sin(2 * t_step + 1);
x0_dot= @(t_step) 5 * 2 * cos(2 * t_step + 1);
L=2;%车辆轴距
v=2;%初始速度
dt=0.05;%时间间隔
Q = eye(3) * 3.0;
R = eye(2) * 2.0;
robot_state = zeros(4, 1);
VehicleParams.Lw = 2.8 * 2; % wheel base
VehicleParams.Lf = 0.96 * 2; % front hang
VehicleParams.Lr = 0.929 * 2; % rear hang
VehicleParams.Lb = 1.942 * 2; % width
VehicleParams.Ll = VehicleParams.Lw + VehicleParams.Lf + VehicleParams.Lr; % length
VehicleParams.f2x = 1/4 * (3*VehicleParams.Lw + 3*VehicleParams.Lf - VehicleParams.Lr);
VehicleParams.r2x = 1/4 * (VehicleParams.Lw + VehicleParams.Lf - 3*VehicleParams.Lr);
VehicleParams.radius = 1/2 * sqrt((VehicleParams.Lw + VehicleParams.Lf + VehicleParams.Lr) ^ 2 / 4 + VehicleParams.Lb ^ 2);
VehicleParams.a_max = 0.5;
VehicleParams.v_max = 2.5;
VehicleParams.phi_max = 0.7;
VehicleParams.omega_max = 0.5;
% for wheel visualization
VehicleParams.wheel_radius = 0.32*2;
VehicleParams.wheel_width = 0.22*2;
iter_max = 100;
Eps = 1e-4;4.1 仿真效果
相关文章:
面向阿克曼移动机器人(自行车模型)的LQR(最优二次型调节器)路径跟踪方法
线性二次调节器(Linear Quadratic Regulator,LQR)是针对线性系统的最优控制方法。LQR 方法标准的求解体系是在考虑到损耗尽可能小的情况下, 以尽量小的代价平衡其他状态分量。一般情况下,线性系统在LQR 控制方法中用状态空间方程描…...

【运维】在 Docker 容器中指定 UTF-8 编码:方法与技巧
在 Docker 容器中指定 UTF-8 编码:方法与技巧 在日常开发中,我们常常需要确保应用程序能正确处理各种字符编码,尤其是 UTF-8 编码。在 Docker 容器中运行应用程序时,正确设置字符编码尤为重要,因为容器通常是跨平台、…...

primetime中cell和net的OCV
文章目录 前言一、Cell OCV1. POCV coefficient file2. POCV Slew-Load Table in Liberty Variation Format(LVF lib) 二、Net OCV三、如何check OCV是否已加上?总结 前言 在生产中,外界环境的各种变化,比如PVT&#…...
FlinkX学习
FlinkX学习 FlinkX安装 由于flinkx已经改名chunjun 官网已不存在 (https://gitee.com/lugela/flinkx#flinkx)这里可以看到flinkx的操作文档 1、上传并解压 unzip flinkx-1.10.zip -d /usr/local/soft/2、配置环境变量 FLINKX_HOME/usr/local/soft/flinkx-1.10 export PATH$F…...

新书速览|解密AI绘画与修图: Stable Diffusion+Photoshop
《解密AI绘画与修图: Stable DiffusionPhotoshop》 本书内容 《解密AI绘画与修图:Stable DiffusionPhotoshop》全面介绍了Photoshop和Stable Diffusion的交互方式,以及各自的AI功能和具体使用方法。除了讲解功能,还通过实际案例加…...

1111111111111
计算机视觉技术在医疗领域的应用正迅速成为推动医疗进步的关键力量。通过高级图像处理和分析,这项技术在医学影像分析(包括CT、MRI和X光图像)、实时手术辅助、患者监测和护理、以及疾病早期诊断等方面展现出巨大的潜力。然而,随着…...

云原生概念
云原生是一种新型的技术体系和方法论,旨在充分利用云计算环境的优势,使应用程序更具有弹性、可伸缩性、可靠性和效率。以下是云原生的详细解释: 定义: 云原生是一种基于分布部署和统一运管的分布式云,以容器、微服务、…...

NoSQL之Redis高可用与优化
一、Redis高可用 在web服务器中,高可用是指服务器可以正常访问的时间,衡量的标准是在多长时间内可以提供正常服务(99.9%、99.99%、99.999%等等)。 但是在Redis语境中,高可用的含义似乎要宽泛一些,除了保证…...

MySQL 常见存储引擎详解(一)
本篇主要介绍MySQL中常见的存储引擎。 目录 一、InnoDB引擎 简介 特性 最佳实践 创建InnoDB 存储文件 二、MyISAM存储引擎 简介 特性 创建MyISAM表 存储文件 存储格式 静态格式 动态格式 压缩格式 三、MEMORY存储引擎 简介 特点 创建MEMORY表 存储文件 内…...

Leetcode 股票买卖
买卖股票最佳时机 I II 不限制交易次数 prices [7,1,5,3,6,4] 启发思路:最后一天发生了什么? 从第0天到第5天结束时的利润 从第0天到第4天结束时的利润 第5天的利润 (第5天的利润:0/-4/4) 关键词:天…...
小白学习手册:轻松理解MQ消息队列
目录 # 开篇 RabbitMQ介绍 通讯概念 1. 初始MQ及类型 2. MQ的架构 2.1 RabbitMQ的结构和概念 2.2 RabbitMQ消息流示意图 3. MQ下载使用 3.1 Docker下载MQ参考 3.2 进入RabbitMQ # 开篇 MessagesQueue 是一个抽象概念,用于描述消息队列系统的一般特性和功能…...

electron线上更新
一、安装electron-updater npm install --save electron-updater二、在main.js中引入使用 import { autoUpdater } from electron; if (!isDev) {const serverUrl https://your-update-server.com; // 自定义更新服务器地址或GitHub Releases地址autoUpdater.setFeedURL(${…...

谈谈检测浏览器类型
前几天被问到如何检测浏览器类型,我突然发现我对此并不了解,之前的项目中也没有使用到过,只隐约记得通过一个自带的方法即可获取。所以今天特意来仔细补习一下。 核心:navigator.userAgent 1.正则表达式 2.引用外部库 3.判断浏…...

Django 和 Django REST framework 创建对外 API
1. 环境准备 确保你已经安装了 Python 和 Django。如果尚未安装 Django REST framework,通过 pip 安装它: pip install djangorestframework 2. 创建 Django 项目 如果你还没有 Django 项目,可以通过以下命令创建: django-ad…...
数据结构之“刷链表题”
🌹个人主页🌹:喜欢草莓熊的bear 🌹专栏🌹:数据结构 目录 前言 一、相交链表 题目链接 大致思路 代码实现 二、环形链表1 题目链接 大致思路 代码实现 三、环形链表2 题目链接 大致思路 代码实…...
复分析——第9章——椭圆函数导论(E.M. Stein R. Shakarchi)
第 9 章 椭圆函数导论 (An Introduction to Elliptic Functions) The form that Jacobi had given to the theory of elliptic functions was far from perfection; its flaws are obvious. At the base we find three fundamental functions sn, cn and dn. These functio…...

使用kubeadm安装k8s并部署应用
安装k8s 1. 准备机器 准备三台机器 192.168.136.104 master节点 192.168.136.105 worker节点 192.168.136.106 worker节点2. 安装前配置 1.基础环境 ######################################################################### #关闭防火墙: 如果是云服务器&…...
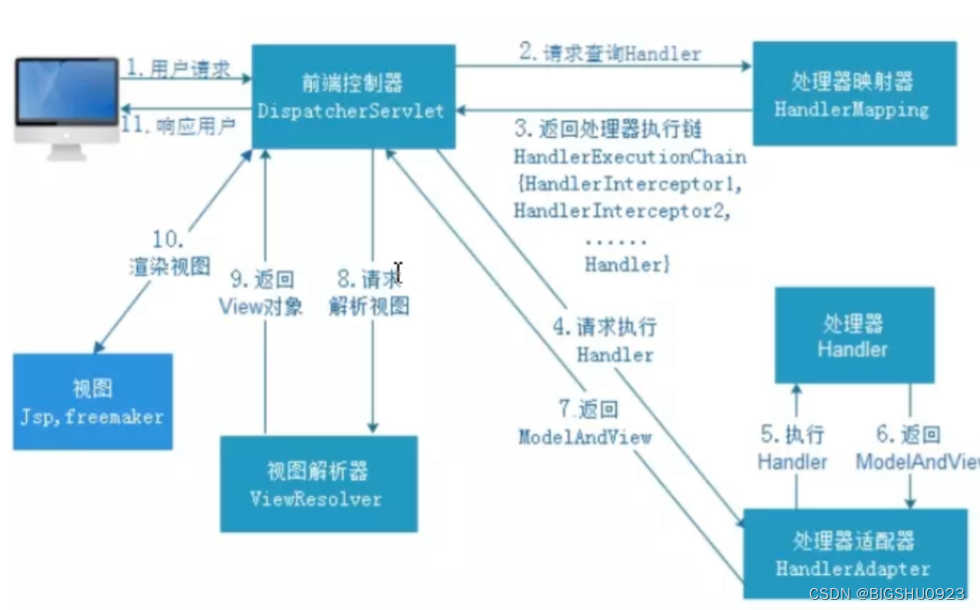
springMVC学习
概述 Spring MVC(Model-View-Controller,模型-视图-控制器)是Spring框架的一部分,用于构建基于Java的Web应用程序。它遵循MVC设计模式,分离了应用程序的不同方面(输入逻辑、业务逻辑和UI逻辑)&…...

深入探讨光刻技术:半导体制造的关键工艺
前言 光刻(Photolithography)是现代半导体制造过程中不可或缺的一环,它的精度和能力直接决定了芯片的性能和密度。本文将详细介绍光刻技术的基本原理、过程、关键技术及其在半导体制造中的重要性。 光刻技术的基本原理 光刻是一种利用光化…...
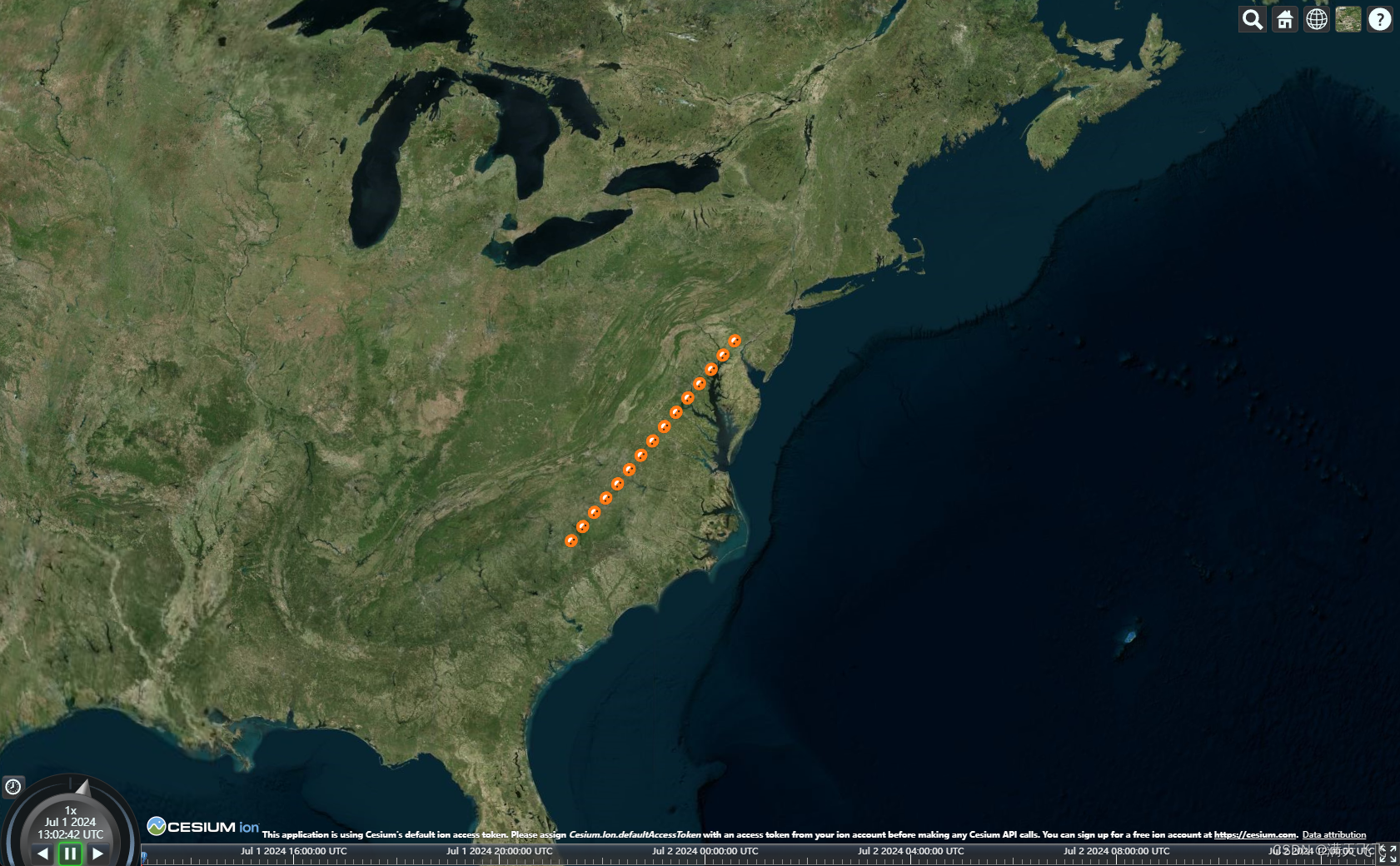
CesiumJS【Basic】- #042 绘制纹理线(Primitive方式)
文章目录 绘制纹理线(Primitive方式)1 目标2 代码2.1 main.ts3 资源文件绘制纹理线(Primitive方式) 1 目标 使用Primitive方式绘制纹理线 2 代码 2.1 main.ts var start = Cesium.Cartesian3.fromDegrees(-75.59777, 40.03883);var...

Delphi7 突破局限!借助Python扩展程序能力。
在桌面开发领域,Delphi7 凭借其简洁高效的可视化开发能力、稳定的运行性能,至今仍被许多开发者用于工业自动化、金融终端、桌面工具等项目开发。但不可否认的是,Delphi7 在网络数据抓取、AI交互、复杂数据处理等场景中存在天然局限࿰…...

Unity角色控制器深度解析:从原理到实战,打造3A级移动手感
1. 项目概述:一个为游戏角色注入灵魂的控制器如果你在游戏开发领域摸爬滚打过,尤其是涉足过3D动作、冒险或者平台跳跃类项目,那你一定对“角色控制器”这个概念又爱又恨。爱的是,它是连接玩家输入与游戏世界反馈的核心桥梁&#x…...

Cursor AI 代码助手规则引擎:定制化约束与团队协作实践
1. 项目概述:一个为 Cursor 编辑器量身定制的规则引擎如果你和我一样,深度依赖 Cursor 这款 AI 驱动的代码编辑器,那你一定遇到过这样的场景:面对一个复杂的重构任务,你向 Cursor 的 AI 助手(无论是 Claude…...

ARM核心板在POCT设备开发中的选型与应用实战
1. 项目概述:ARM核心板如何重塑POCT设备开发在医疗设备这个对稳定性和可靠性要求近乎苛刻的领域,每一次技术选型都像是一次精密的手术,容不得半点闪失。我接触过不少体外诊断(IVD)设备厂商,尤其是做即时检验…...

IDM激活脚本:3分钟解锁完整版下载功能的终极指南
IDM激活脚本:3分钟解锁完整版下载功能的终极指南 【免费下载链接】IDM-Activation-Script-ZH IDM激活脚本汉化版 项目地址: https://gitcode.com/gh_mirrors/id/IDM-Activation-Script-ZH 还在为Internet Download Manager(IDM)的30天…...

Yii2开启URI伪静态的相关配置
Yii2 开启URI伪静态的相关配置 Yii2支持url伪静态链接转换,在配置文件config/web.php中加入 # config/web.php $config [components > [// URI伪静态化配置urlManager > [enablePrettyUrl > true, // 启用美化 URL(隐藏 index.php)…...

在多轮对话任务中实测 Taotoken 路由策略对响应成功率的影响
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在多轮对话任务中实测 Taotoken 路由策略对响应成功率的影响 1. 测试背景与场景设定 在开发需要长时间连续交互的对话型应用时&am…...

Sealos云操作系统:基于Kubernetes内核的桌面化云原生平台实践
1. 项目概述:从“集群”到“桌面”的云原生新范式如果你和我一样,长期在云原生领域摸爬滚打,那么对“Kubernetes集群”的部署和管理一定不会陌生。从早期的kubeadm手动搭建,到后来各种发行版和托管服务,我们一直在追求…...
开源清理工具OpenClearn:透明可控的数字垃圾管理方案
1. 项目概述:一个开源的“清洁工”如何重塑你的数字生活如果你和我一样,是个在数字世界里摸爬滚打了十几年的老鸟,那你电脑里肯定也有一堆“数字垃圾”。这些垃圾不是指那些过时的文件,而是那些你明明已经删除了,但操作…...

紧急通知:v8.1即将关闭旧版审美缓存——72小时内必须完成的3步风格校准清单
更多请点击: https://intelliparadigm.com 第一章:v8.1旧版审美缓存关停的技术动因与全局影响 核心架构演进压力 V8.1 引擎中长期运行的“审美缓存”(Aesthetic Cache)模块,本质上是一套基于 DOM 树节点样式偏好建模…...