Python协作运动机器人刚体力学解耦模型
🎯要点
🎯腿式或固定式机器人模型 | 🎯网格、点云和体素网格碰撞检测 | 🎯正反向运动学和动力学 | 🎯机器人刚体力学计算 | 🎯编辑参考系姿势和路径 | 🎯软件接口实体机器人模拟 | 🎯三角网格碰撞刚体模拟 | 🎯机器人比例微分积分控制、扭矩控制和速度控制模拟 | 🎯相机、激光传感器、陀螺仪、力/扭矩传感器和加速度计模拟 | 🎯集成ROS模拟 | 🎯运动规划器、约束流形上的运动规划 | 🎯快速轨迹优化 | 🎯实时运动规划 | 🎯解耦规划模型与模拟模型
📜刚体力学用例:Python自行车六自由度飞行器多连接件非线性运动方程模型


🍇Python力学动能势能
粒子 P 的线性动量定义为:
L P = m v L_P=m v LP=mv
其中 m m m是粒子 P P P的质量, v v v是粒子在惯性系中的速度。
类似地,刚体的线性动量定义为:
L B = m v ∗ L_B=m v ^* LB=mv∗
其中 m m m是刚体的质量, B B B, v ∗ v^* v∗是惯性系中 B B B质心的速度。
质点 P 绕惯性系 N 中任意点 O 的角动量定义为:
N H P / O = r × m v { }^N H ^{P / O}= r \times m v NHP/O=r×mv
其中 r r r是从点 O O O到质量 m m m的粒子的位置向量, v v v是惯性系中粒子的速度。
类似地,刚体 B 绕惯性系 N 中的点 O 的角动量定义为:
N H B / O = N H B / B ∗ + N H B ∗ / O { }^N H ^{B / O}={ }^N H ^{B / B^*}+{ }^N H ^{B^*} / O NHB/O=NHB/B∗+NHB∗/O
其中物体绕其质心的角动量为:
N H B / B ∗ = I ∗ ⋅ ω { }^N H ^{B / B^*}= I ^* \cdot \omega NHB/B∗=I∗⋅ω
质心关于 O 的角动量为:
N H B ∗ / O = r ∗ × m v ∗ { }^N H ^{B^*} / O= r ^* \times m v ^* NHB∗/O=r∗×mv∗
Python伪代码实现上述动量:
from pyx import symbols
from pyx.physics.mechanics import dynamicsymbols, ReferenceFrame
from pyx.physics.mechanics import RigidBody, Particle, Point, outer
from pyx.physics.mechanics import linear_momentum, angular_momentum
from pyx.physics.vector import init_vprinting
init_vprinting(pretty_print=False)
m, M, l1 = symbols('m M l1')
q1d = dynamicsymbols('q1d')
N = ReferenceFrame('N')
O = Point('O')
O.set_vel(N, 0 * N.x)
Ac = O.locatenew('Ac', l1 * N.x)
P = Ac.locatenew('P', l1 * N.x)
a = ReferenceFrame('a')
a.set_ang_vel(N, q1d * N.z)
Ac.v2pt_theory(O, N, a)
P.v2pt_theory(O, N, a)
最后,创建组成系统的主体。在这种情况下,系统由粒子 Pa 和刚体 A 组成。
Pa = Particle('Pa', P, m)
I = outer(N.z, N.z)
A = RigidBody('A', Ac, a, M, (I, Ac))
然后,人们可以选择评估系统各个组件的动量或整个系统本身的动量。
linear_momentum(N,A)
angular_momentum(O, N, Pa)
linear_momentum(N, A, Pa)
angular_momentum(O, N, A, Pa)
粒子 P 的动能定义为
T P = 1 2 m v 2 T_P=\frac{1}{2} m v ^2 TP=21mv2
其中 m m m是粒子 P P P的质量, v v v是粒子在惯性系中的速度。
类似地,刚体 B 的动能定义为
T B = T t + T τ T_B=T_t+T_\tau TB=Tt+Tτ
其中平动动能由下式给出:
T t = 1 2 m v ∗ ⋅ v ∗ T_t=\frac{1}{2} m v ^* \cdot v ^* Tt=21mv∗⋅v∗
旋转动能由下式给出:
T r = 1 2 ω ⋅ I ∗ ⋅ ω T_r=\frac{1}{2} \omega \cdot I ^* \cdot \omega Tr=21ω⋅I∗⋅ω
其中 m m m是刚体的质量, v ∗ v^* v∗是惯性系中质心的速度, ω \omega ω是刚体的惯性角速度, I ∗ I^* I∗是中心惯性二元。
势能定义为物体或系统因其位置或排列而拥有的能量。
物体或物体系统的拉格朗日定义为:
L = T − V L =T-V L=T−V
其中 T T T和 V V V分别是动能和势能。
Python伪代码实现:
from pyx import symbols
from pyx.physics.mechanics import dynamicsymbols, ReferenceFrame, outer
from pyx.physics.mechanics import RigidBody, Particle
from pyx.physics.mechanics import kinetic_energy, potential_energy, Point
from pyx.physics.vector import init_vprinting
init_vprinting(pretty_print=False)
m, M, l1, g, h, H = symbols('m M l1 g h H')
omega = dynamicsymbols('omega')
N = ReferenceFrame('N')
O = Point('O')
O.set_vel(N, 0 * N.x)
Ac = O.locatenew('Ac', l1 * N.x)
P = Ac.locatenew('P', l1 * N.x)
a = ReferenceFrame('a')
a.set_ang_vel(N, omega * N.z)
Ac.v2pt_theory(O, N, a)
P.v2pt_theory(O, N, a)
Pa = Particle('Pa', P, m)
I = outer(N.z, N.z)
A = RigidBody('A', Ac, a, M, (I, Ac))
然后,用户可以确定系统中任意数量实体的动能:
kinetic_energy(N, Pa)
kinetic_energy(N, Pa, A)
然后可以确定构成系统的任意数量的实体的势能:
Pa.potential_energy = m * g * h
A.potential_energy = M * g * H
potential_energy(A, Pa)
我们还可以确定该系统的拉格朗日量:
from pyx.physics.mechanics import Lagrangian
from pyx.physics.vector import init_vprinting
init_vprinting(pretty_print=False)
Lagrangian(N, Pa, A)
👉参阅更新:计算思维 | 亚图跨际
相关文章:
Python协作运动机器人刚体力学解耦模型
🎯要点 🎯腿式或固定式机器人模型 | 🎯网格、点云和体素网格碰撞检测 | 🎯正反向运动学和动力学 | 🎯机器人刚体力学计算 | 🎯编辑参考系姿势和路径 | 🎯软件接口实体机器人模拟 | Ἲ…...
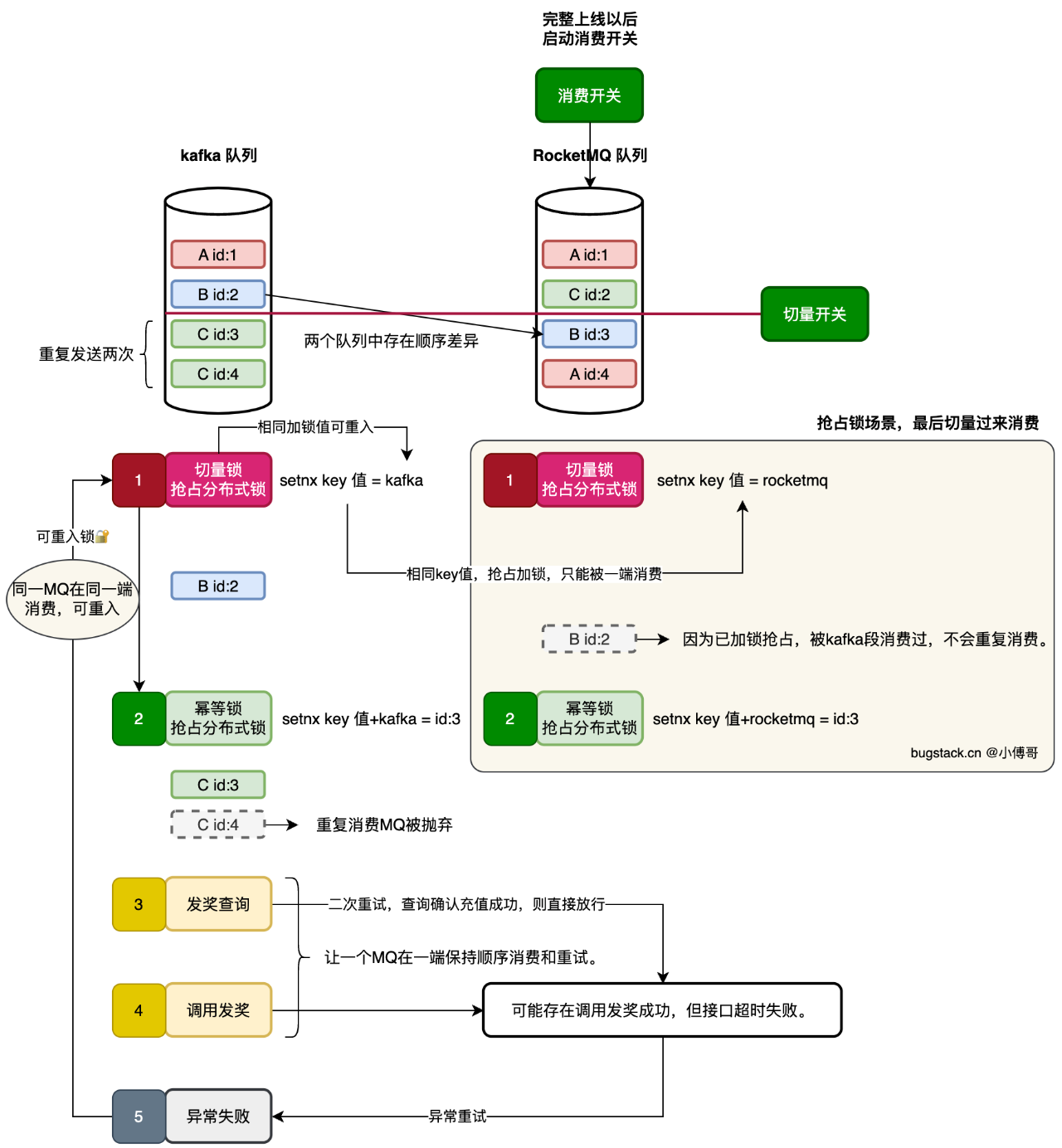
可重入锁思想,设计MQ迁移方案
如果你的MQ消息要从Kafka切换到RocketMQ且不停机,怎么做?在让这个MQ消息调用第三方发奖接口,但无幂等字段又怎么处理?今天小傅哥就给大家分享一个关于MQ消息在这样的场景中的处理手段。 这是一种比较特例的场景,需要保…...

Redis安装与使用
目录 1、介绍 1、redis的特点: 2、缓存 2、安装Redis 1、安装单机版redis 2、redis-cli命令参数 3、清空数据库的两种方式和作用域: 4、redis的增删查改命令 5、redis的查看所有分类命令 6、redis过期时间与控制键的行为 7、redis的相关工具 1、介绍 r…...

base64字符串空格问题
客户端使用的Content-Type为application/x-www-form-urlencoded时,字符串中出现了空格,base64解码时出错了,因为原来的字符有号, Spring Boot 对于Content-Type为application/x-www-form-urlencoded的HTTP请求,默认情…...

【BES2500x系列 -- RTX5操作系统】深入探索CMSIS-RTOS RTX -- 同步与通信篇 -- 消息队列和邮箱处理 --(四)
💌 所属专栏:【BES2500x系列】 😀 作 者:我是夜阑的狗🐶 🚀 个人简介:一个正在努力学技术的CV工程师,专注基础和实战分享 ,欢迎咨询! Ὁ…...
电信NR零流量小区处理
【摘要】随着目前网络建设逐步完善,5G用户的不断发展,针对零流量小区的分析及处理存在着必要性,零流量小区的出现既是用户分布及行为的直观体现,也是发展用户的一个指引,同时也能发现设备的一些故障。一个站点的能够带…...

ArcTs布局入门03——层叠布局(Stack)
如果你也对鸿蒙开发感兴趣,加入“Harmony自习室”吧! 扫描下面的二维码关注公众号。 1、概述 叠布局(StackLayout)用于在屏幕上预留一块区域来显示组件中的元素,提供元素可以重叠的布局。层叠布局通过Stack容器组件实…...
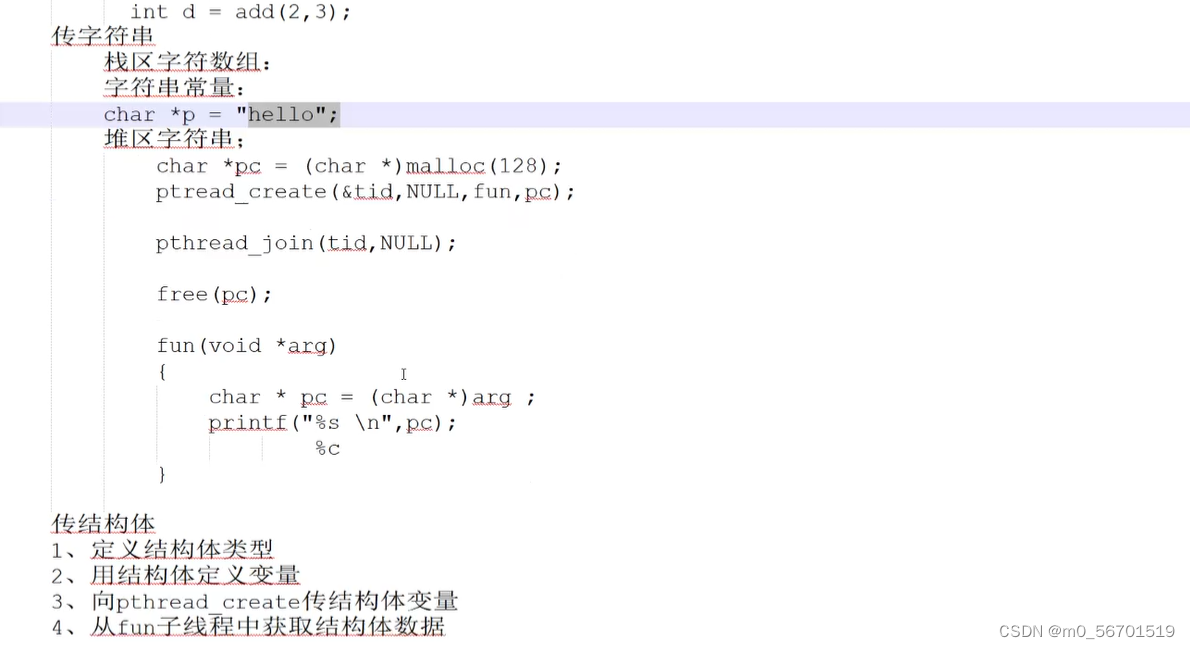
C语言之线程的学习
线程属于某一个进程 共同点:都能并发 线程共享变量,进程不共享。 多线程任务中,其中某一个线程调用了exit了,其他线程会跟着一起退出 如果是特定的线程就调用pthread_exit 失败返回的是错误号 下面也是...
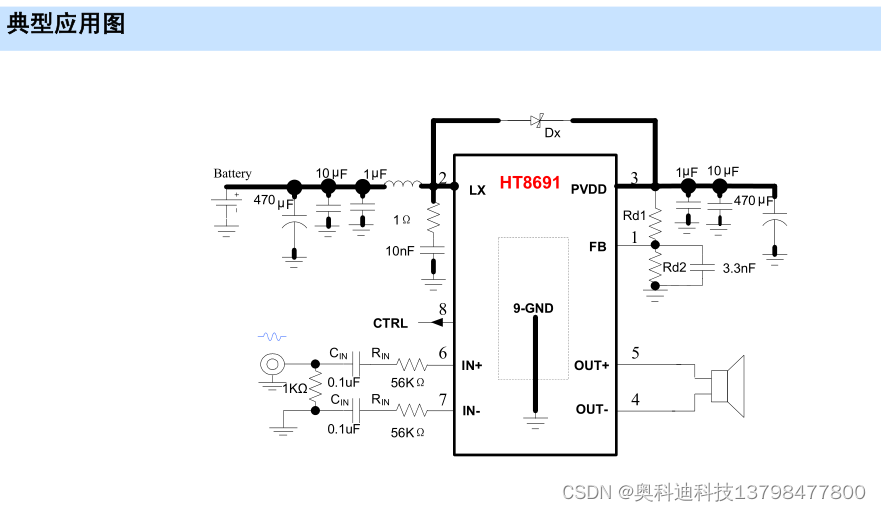
HT8691 内置升压模块的D类音频功率放大器芯片IC
一般描述 HT8691是一款内置升压模块的D类音频功率放大器。内置的升压模块可通过外置电阻调节升压值,即使是锂电池供电,在升压至6.5V时,10%THDN,4Ω负载条件下能连续输出5.5W功率;升压至7V,3Ω负载条件下则能连续输出7.0W功率。其支持外部设置…...

和小红书一起参会! 了解大模型与大数据融合的技术趋势
在过去的两年中,“大模型”无疑成为互联网行业的焦点话题,曾经炙手可热的大数据架构似乎淡出公众视野。然而,大数据领域并未停滞不前,反而快速演进,传统依赖众多开源组件的大数据平台正逐步过渡到以融合与简化为核心特…...
】7 Feeling)
【vocabulary in use (elementary)】7 Feeling
happy 高兴 sad 伤心 angry 生气 upset 丧气 cold 冷 hot 热 thirsty 口渴 hungry 饿 well 很好 ill 生病 tired 累了 surprised 惊讶 关于喜欢的表达: like to do 偶尔一次喜欢 like doing 一直喜欢的 outdoor activities 户外运动 be keep on doing 坚持做 be fo…...
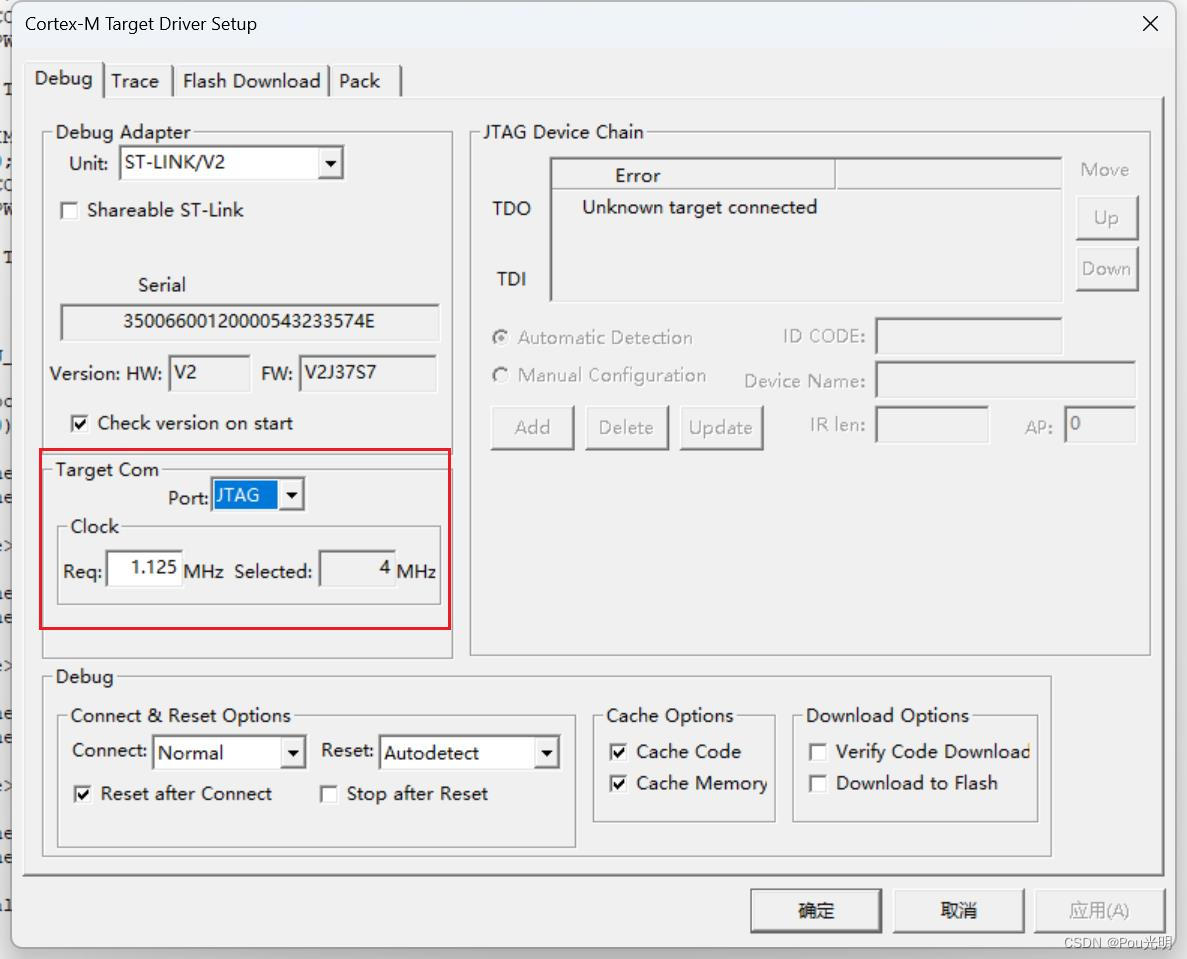
Keil5 ST-LINK setting闪退问题解决
1. 官网下载新版驱动文件 MDK uVision crashes when using ST-Link debugger 2. 解压替换 STLinkUSBDriver6.1.2.0Signed 我的库文件目录: D:\Tool\Keil5\ARM\STLink...

熟练掌握Docker及linux常用命令排查线上问题。熟悉Git, Maven等项目管理及构建工具,熟悉微服务中基于Jenkins的CI/CD
掌握Docker、Linux命令、项目管理及构建工具,以及CI/CD流程是现代软件开发和运维的关键技能。以下是对这些技能的概述和一些实践建议: ### Docker - **概述**:Docker是一个开源的容器化平台,允许开发者打包应用及其依赖到一个可移…...
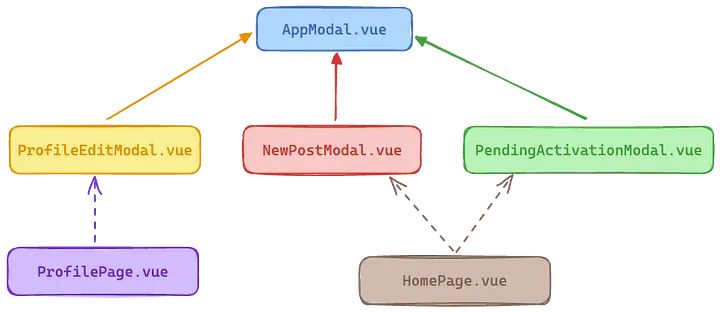
78.Vue 3 重用性模态框组件
模态框是大多数 Web 应用程序中的基本构建块。虽然最初实现起来可能看起来有点棘手,但实际上,使用 Vue 和一些 Flexbox 技巧,这不仅可行,而且非常简单。 让我们一起实现一个基础的模态框组件。 架构如下: AppModal.vue…...
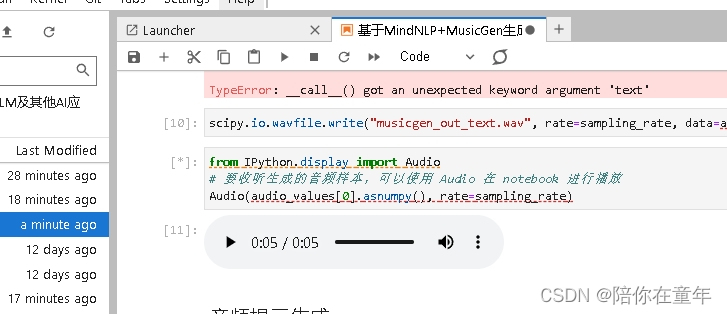
《昇思25天学习打卡营第9天|onereal》
继续学习昨天的 基于MindNLPMusicGen生成自己的个性化音乐 生成音乐 MusicGen支持两种生成模式:贪心(greedy)和采样(sampling)。在实际执行过程中,采样模式得到的结果要显著优于贪心模式。因此我们默认启…...

Wireshark - tshark支持iptables提供数据包
tshark现在的数据包获取方式有两种,分别是读文件、网口监听(af-packet原始套接字)。两种方式在包获取上,都是通过读文件的形式;存在文件io操作,在专门处理大流量的情境下, 我们复用wireshark去做…...

快团团团长如何批量退款可自定义退款金额(批量退差价)?
快团团团长如何批量退款可自定义退款金额(批量退差价)? 在售后处理中,经常会出现需要给某一商品退差价的场景,因此在批量退款时需要自定义退款金额。现快团团已支持批量退自定义金额,操作方法和注意事项如…...
MySQL——事务ACID原则、脏读、不可重复读、幻读
什么是事务 要么都成功,要么都失败 一一一一一一一 1. SQL执行:A给B转账 A 1000 ---->200 B 200 2. SQL执行:B收到A的钱 A 800 B 400 一一一一一一一 将一组SQL放在一个批次中去执行~ 事务原则:ACI…...

洗衣机水龙头要买有止逆阀的,多花几十元能省掉几万,值了
问大家一下,你家洗衣机水龙头用的是什么样的? 可能有业主会说我家买的是纯铜的,质量挺好的。 如果你家选的洗衣机水龙头仅仅是纯铜的,并没有其他的功能,你还是选做错了。 因为洗衣机水龙头…...

Android 蓝牙开发全面指南
Android 平台的蓝牙功能提供了丰富的API和工具,使开发者能够轻松实现从基本连接到复杂数据交换的各种蓝牙功能。蓝牙技术已经成为智能手机和其他设备间通信的重要方式,尤其在物联网和智能家居应用中有广泛应用。 关键词总结 Android 蓝牙开发涉及多个关…...

一键获取Steam游戏清单:Onekey工具让游戏管理变得如此简单
一键获取Steam游戏清单:Onekey工具让游戏管理变得如此简单 【免费下载链接】Onekey Onekey Steam Depot Manifest Downloader 项目地址: https://gitcode.com/gh_mirrors/one/Onekey 你是否曾为管理Steam游戏文件而烦恼?想备份心爱的游戏却不知从…...
)
保姆级教程:在Ubuntu 20.04上从源码编译aarch64-linux-gnu交叉工具链(GCC 9.2.0 + Glibc 2.30)
深度实践:从源码构建aarch64-linux-gnu交叉工具链全指南 在嵌入式开发领域,交叉编译工具链的构建能力是区分普通开发者与资深工程师的重要标志。当现成的预编译工具链无法满足特定需求时,从源码手动构建工具链不仅能解决兼容性问题࿰…...

如何用Python爬虫将知识星球内容制作成PDF电子书:完整指南
如何用Python爬虫将知识星球内容制作成PDF电子书:完整指南 【免费下载链接】zsxq-spider 爬取知识星球内容,并制作 PDF 电子书。 项目地址: https://gitcode.com/gh_mirrors/zs/zsxq-spider 知识星球作为优质内容社区,汇集了大量付费专…...

Real-ESRGAN-GUI 终极指南:免费AI图像增强工具如何让模糊照片重获高清新生
Real-ESRGAN-GUI 终极指南:免费AI图像增强工具如何让模糊照片重获高清新生 【免费下载链接】Real-ESRGAN-GUI Lovely Real-ESRGAN / Real-CUGAN GUI Wrapper 项目地址: https://gitcode.com/gh_mirrors/re/Real-ESRGAN-GUI 你是否曾为模糊的老照片感到无奈&a…...

如何快速突破平台限制:跨平台Steam创意工坊模组下载终极指南
如何快速突破平台限制:跨平台Steam创意工坊模组下载终极指南 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL 还在为Epic Games或GOG平台无法访问Steam创意工坊而烦恼…...

防火门安装与验收要点|闭门器、密封条、顺序器缺一不可
防火门安装与验收要点一、必备配件(缺一不可)闭门器:自动关门,火灾常态闭合防火密封条:遇火膨胀,隔烟阻火顺序器:双扇门专用,保证先后闭合二、安装要点门框墙体嵌实牢固,…...

UVa 366 Cutting Up
题目描述 拼布者经常需要将布料切割成 111 \times 111 的小正方形。他们有一种特殊工具(旋转切割刀),可以一次切割多层布料,切割层数的上限由布料类型决定(题目输入的第一个参数 KKK)。切割时,无…...
,现在必须掌握的3种替代渲染方案)
像素艺术家紧急预警:Midjourney即将关闭--tile参数兼容性(倒计时14天),现在必须掌握的3种替代渲染方案
更多请点击: https://intelliparadigm.com 第一章:像素艺术家紧急预警:Midjourney即将关闭--tile参数兼容性(倒计时14天) Midjourney v6.5 已正式宣布将于 14 天后终止对 --tile 参数的原生支持,此举将直…...

AI智能体GUI交互实战:从原理到实现,让AI玩转桌面应用
1. 项目概述:一个能“玩”游戏的AI智能体最近在AI智能体(Agent)的圈子里,一个名为“ChattyPlay-Agent”的开源项目引起了我的注意。乍一看名字,你可能会觉得它又是一个基于大语言模型(LLM)的聊天…...

基于MCP协议构建Naver搜索服务器,为AI智能体赋能实时信息获取
1. 项目概述:一个连接AI与实时信息的桥梁最近在折腾AI应用开发,特别是围绕OpenAI的Assistant API和Claude的Tool Use功能时,我一直在思考一个问题:如何让这些强大的AI模型摆脱其知识库的“时间枷锁”,获取到最新、最实…...