Ubuntu22.04使用Systemd设置ROS 2开机自启动遇到的问题
在查找网上的各种开机自启动资料配置好开机自启动后,使用ros2 topic list不能显示话题。
- 1、问题解决:用户问题与domenID问题
- 2、ROS2开机自启动服务教程
- 3、多个ROS2开机自启动服务教程
1、问题解决:用户问题与domenID问题
在root用户下能看到话题,但是不能在普通用户下看到,在启动脚本中使用以下指令后,仍然无法在普通用户看到话题。
#echo "nvidia" | su - nvidia -s /bin/bash /home/nvidia/rc.sh
解决方法:
将root用户和普通用户的~/.bashrc环境变量中的export ROS_DOMAIN_ID=0
sudo vi ~/.bashrc
export ROS_DOMAIN_ID=0sudo su
sudo vi ~/.bashrc
export ROS_DOMAIN_ID=0
2、ROS2开机自启动服务教程
以下是通过Systemd设置ROS 2开机自启动方法:
创建服务:
sudo vi /usr/lib/systemd/system/start-one.service
[Unit]
Description=start-one[Service]
Type=simple# 当前的用户名
User=nvidia# 开机自启动脚本start_one.sh
ExecStart=/home/nvidia/start_one.sh PrivateTmp=true
KillMode=control-group[Install]
WantedBy=multi-user.target
创建自启动脚本:
sudo vi start_one.sh
#!/bin/bash
cd /home/nvidia/dev_ws
source ~/.bashrc
source /opt/ros/humble/setup.bash
source /home/nvidia/dev_ws/install/setup.bash
ros2 launch package package.launch.xml
给服务和脚本权限:
sudo chmod 777 /usr/lib/systemd/system/start-one.service
sudo chmod 777 start_one.sh
重新加载服务:
sudo systemctl daemon-reload
设置开机自启动服务:
sudo systemctl start start-one.service
sudo systemctl enable start-one.service
查看服务状态:
sudo systemctl status start-one.service
取消关闭服务取消开机自启动:
sudo systemctl stop rstart-one.service
sudo systemctl disable start-one.service
3、多个ROS2开机自启动服务教程
如果有多个ROS2的launch,则需要创建多个服务,并且需要在服务里设置好先后顺序。
先按照上述设置好start-one.service,增加优先级设置。
[Unit]
Description=start-one
Before=start-two.service #这里是设置优先级的,也就是说当前的服务在start-two.service之前启动[Service]
Type=simple# 当前的用户名
User=nvidia# 开机自启动脚本start_one.sh
ExecStart=/home/nvidia/start_one.sh PrivateTmp=true
KillMode=control-group[Install]
WantedBy=multi-user.target
创建第二个服务:
sudo vi /usr/lib/systemd/system/start-two.service
[Unit]
Description=start-two
After=start-one.service[Service]
Type=simple# 当前的用户名
User=nvidia# 开机自启动脚本start_two.sh
ExecStart=/home/nvidia/start_two.sh PrivateTmp=true
KillMode=control-group[Install]
WantedBy=multi-user.target
创建自启动脚本:
sudo vi start_two.sh
#!/bin/bash
cd /home/nvidia/dev_ws
source ~/.bashrc
source /opt/ros/humble/setup.bash
source /home/nvidia/dev_ws/install/setup.bash
ros2 launch package_two package_two.launch.xml
给服务和脚本权限:
sudo chmod 777 /usr/lib/systemd/system/start-two.service
sudo chmod 777 start_two.sh
重新加载服务:
sudo systemctl daemon-reload
设置开机自启动服务:
sudo systemctl start start-two.service
sudo systemctl enable start-two.service
查看服务状态:
sudo systemctl status start-two.service
相关文章:

Ubuntu22.04使用Systemd设置ROS 2开机自启动遇到的问题
在查找网上的各种开机自启动资料配置好开机自启动后,使用ros2 topic list不能显示话题。 1、问题解决:用户问题与domenID问题2、ROS2开机自启动服务教程3、多个ROS2开机自启动服务教程 1、问题解决:用户问题与domenID问题 在root用户下能看到…...

AI安全研究滞后?清华专家团来支招
在21世纪的科技浪潮中,人工智能(AI)无疑是最为耀眼的一抹亮色。随着技术的不断突破,AI正以前所未有的速度融入我们的日常生活,重塑着社会、经济乃至人类文明的面貌。然而,在这股汹涌澎湃的发展洪流中&#…...

12寸FAB 信息部内外工作职责的一些划分构思
FAB的信息部,也常被称为IT部门或信息化部门,承担着确保整个制造工厂的信息技术系统高效、安全运行的职责。以下是 一、FAB信息部的一些关键部门职责: 1. 战略规划:制定和实施信息技术战略,以支持FAB的长期业务目标和增…...
css做旋转星球可举一反三
<!DOCTYPE html> <html lang"en"><head> <meta charset"UTF-8" /> <title>旋转的星球</title> <style type"text/css">.box {/*position: relative;*/position: absolute;width: 139px;height: 139p…...
AcWing 1256:扩展二叉树
【题目来源】https://www.acwing.com/problem/content/1258/【题目描述】 由于先序、中序和后序序列中的任一个都不能唯一确定一棵二叉树,所以对二叉树做如下处理,将二叉树的空结点用 补齐,如图所示。 我们把这样处理后的二叉树称为原二叉树…...

三维家:SaaS的IT规模化降本之道|OceanBase 《DB大咖说》(十一)
OceanBase《DB大咖说》第 11 期,我们邀请到了三维家的技术总监庄建超,来分享他对数据库技术的理解,以及典型 SaaS 场景在数据库如何实现规模化降本的经验与体会。 庄建超,身为三维家的技术总监,独挑大梁,负…...

ai智能语音机器人是如何影响客户体验的?电销机器人部署
随着人工智能技术的进步,越来越多的企业在寻求如何将人工智能技术融合到现有的商业模式上,进而实现自动化、智能化。在通信行业大量使用智能语音机器人、聊天机器人、客服机器人时,它能和“客户体验”并驾齐驱吗,还是可以让客户体…...
vue3使用v-html实现文本关键词变色
首先看应用场景 这有一段文本内容,是项目的简介,想要实现将文本中的关键词进行变色处理 有如下关键词 实现思路 遍历文本内容,找到关键词,并使用某种方法更改其字体样式。经过搜寻资料决定采用v-html实现,但是v-h…...

C#面:举列 a=10,b=15,在不用第三方变量的前提下,把a,b的值互换
要在不使用第三方变量的前提下交换a和b的值,可以使用异或运算。异或运算的特性是,对于两个相同的数进行异或运算,结果为0;对于任意数与0进行异或运算,结果为该数本身。因此,可以通过多次异或运算来实现变量…...

编写动态库
1.创建库.c .h文件 2.编写Makefile文件 3.make之后形成.so文件 4.make output,形成mylib 5.把mylib拷贝到test里面 mv mylib /test 6.编译 gcc main.c -I mylib/include -L mylib/lib -lmymethod形成a.out 但是直接执行会出现以下问题 很显然没有找到动态库 7.解决加载找不…...
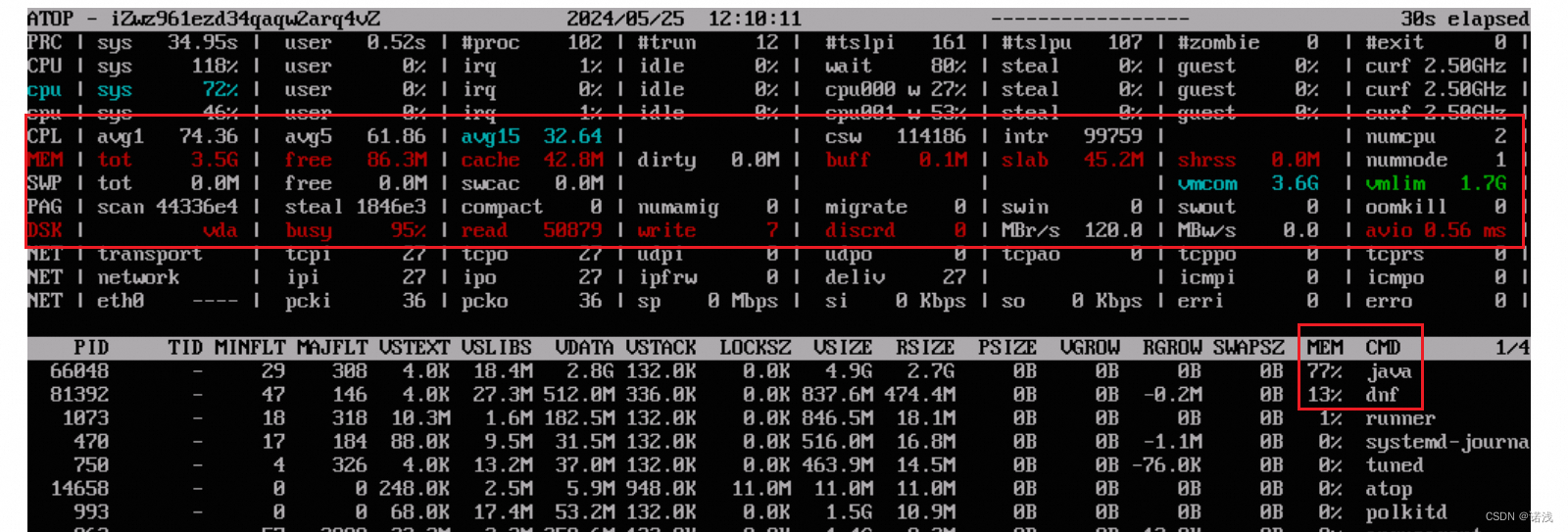
记一次阿里云服务器java应用无法响应且无法远程连接的问题排查
问题表现 java服务无响应,无法远程链接到服务器。 今天中午12点多,应用直接崩溃。后续进入到服务器,发现java进程都不在了, 排查过程 先安装atop工具 安装、配置并使用atop监控工具 等下次再出现时看相关时间点日志ÿ…...

雷池WAF+Modsecurity安装防护及系统加固
君衍. 一、雷池WAF1、什么是雷池2、什么是WAF3、雷池的功能4、WAF部署架构5、整体检测流程 二、雷池WAF环境依赖1、查看本地CPU架构2、Docker安装2.1 卸载旧版本2.2 安装yum-utils工具包2.3 设置镜像仓库2.4 安装docker2.5 启动docker并查看版本 3、Docker Compose安装3.1 卸载…...

【Python】已解决:SyntaxError: positional argument follows keyword argument
文章目录 一、分析问题背景二、可能出错的原因三、错误代码示例四、正确代码示例五、注意事项 已解决:SyntaxError: positional argument follows keyword argument 一、分析问题背景 在Python编程中,当我们在调用函数时混合使用位置参数(p…...
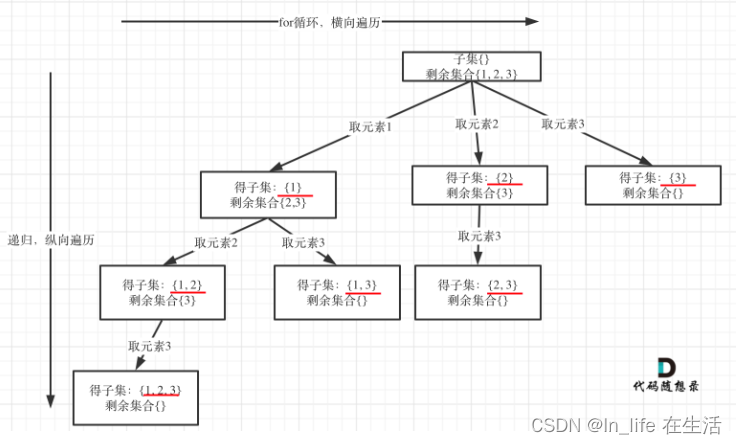
leetcode-20-回溯-切割、子集
一、[131]分割回文串 给定一个字符串 s,将 s 分割成一些子串,使每个子串都是回文串。 返回 s 所有可能的分割方案。 示例: 输入: "aab" 输出: [ ["aa","b"], ["a","a","b"] ] 分析&…...
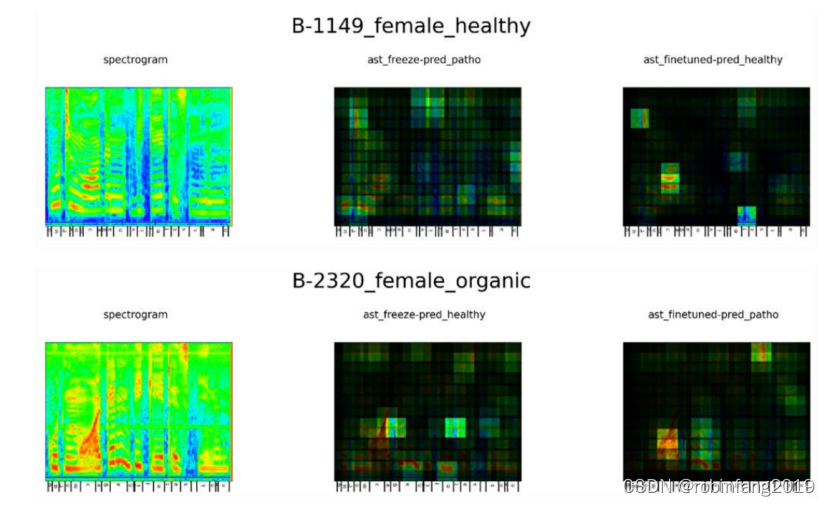
利用深度学习模型进行语音障碍自动评估
语音的产生涉及器官的复杂协调,因此,语音包含了有关身体各个方面的信息,从认知状态和心理状态到呼吸条件。近十年来,研究者致力于发现和利用语音生物标志物——即与特定疾病相关的语音特征,用于诊断。随着人工智能&…...
 把DIV内容生成二维码并与背景图、文字组合生成分享海报)
TP8 JS(html2canvas) 把DIV内容生成二维码并与背景图、文字组合生成分享海报
方法一:前端JS生成(推荐) 注意: 1.这个网页只能截图图片效果代码,其它任何html效果都不能有,不然截图就不准确 2.如果要生成的图片DIV内容中引用了第三个方的图片,就是不使用同一个域名下的图片,需要把后…...
介绍)
计算机科学中的接口(Interface)介绍
计算机科学中的接口(Interface)介绍 计算机科学中,接口是一个广泛的概念,在不同上下文中有不同含义: 1.任何两电路或设备间的连接电路,用于连接CPU与内存、CPU与外设之间。这是一个重要的硬件层面的接口概…...
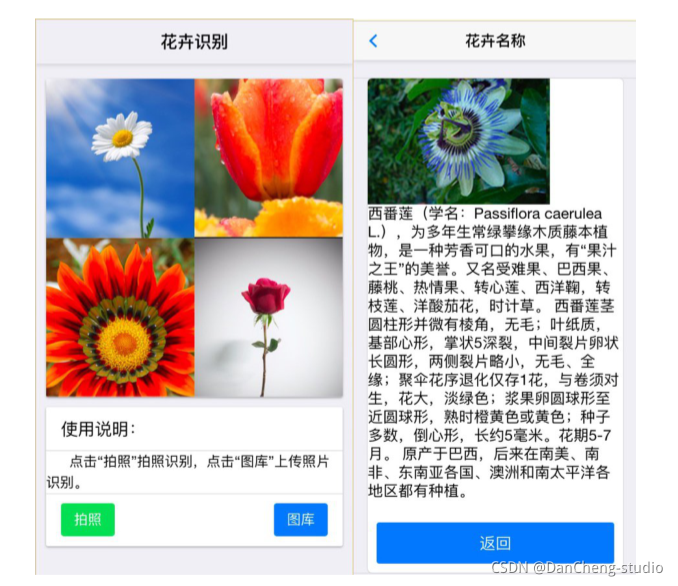
大创项目推荐 题目:基于深度学习卷积神经网络的花卉识别 - 深度学习 机器视觉
文章目录 0 前言1 项目背景2 花卉识别的基本原理3 算法实现3.1 预处理3.2 特征提取和选择3.3 分类器设计和决策3.4 卷积神经网络基本原理 4 算法实现4.1 花卉图像数据4.2 模块组成 5 项目执行结果6 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 基…...
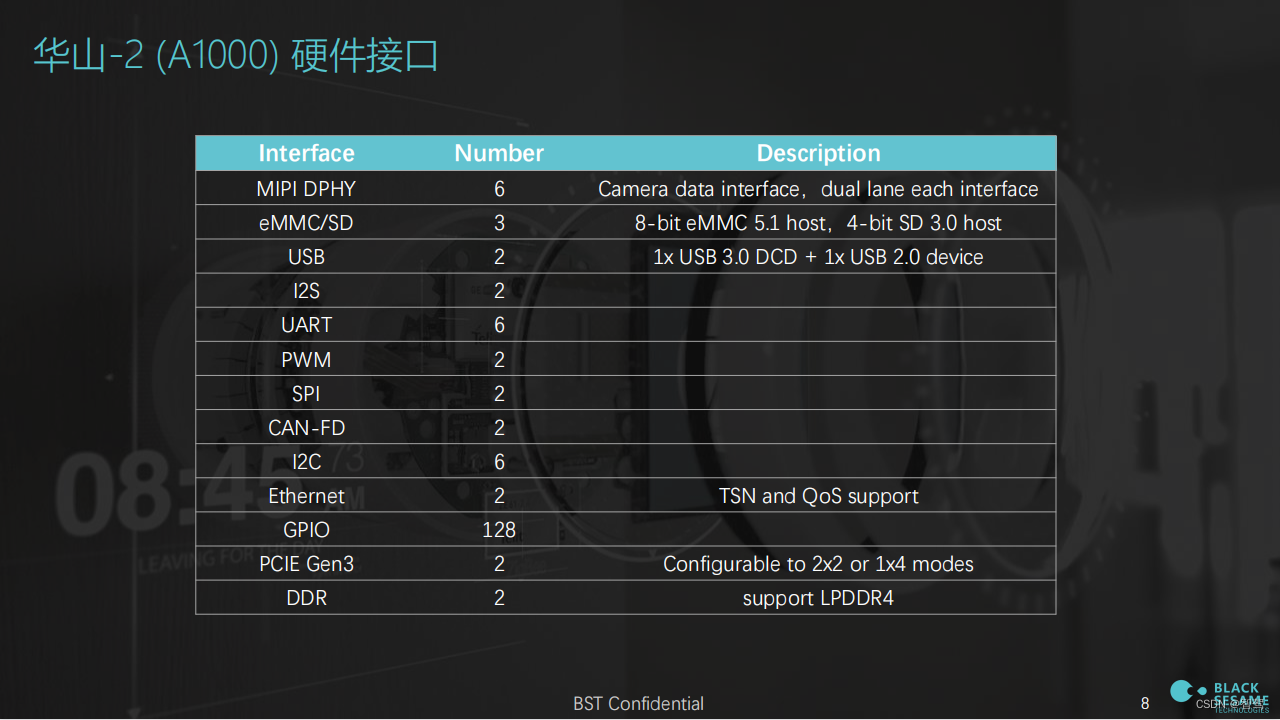
黑芝麻科技A1000简介
文章目录 1. A1000 简介2. 感知能力评估3. 竞品对比4. 系统软件1. A1000 简介...
详解C语言分支与循环语句
分支语句 if elseswitch 循环语句 whilefordo while goto语句 文章目录 1.什么是语句2.分支语句(选择结构)2.1 if语句2.1.1 悬空else2.1.3 练习 2.2 switch语句2.2.1 在switch语句中的break2.2.2 default子句 3.循环语句3.1 while循环3.1.1 while语句中…...

Wand-Enhancer终极指南:免费解锁WeMod专业功能的完整解决方案
Wand-Enhancer终极指南:免费解锁WeMod专业功能的完整解决方案 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 还在为WeMod专业版的高昂订阅费…...

为AI编程助手构建安全防线:Cursor自定义规则实战指南
1. 项目概述:为AI编程助手装上“安全护栏” 如果你和我一样,深度使用Cursor这类AI编程助手,那你一定体验过它带来的效率革命。它能帮你生成代码、重构函数、甚至解释复杂的逻辑,就像一个不知疲倦的编程伙伴。但硬币总有另一面——…...

Bifrost:轻量高效的实时数据同步平台架构与实战
1. 项目概述:Bifrost,一个被低估的现代数据同步利器如果你正在处理跨数据库、跨数据源的数据同步任务,并且对传统ETL工具的笨重、配置复杂感到头疼,那么maximhq/bifrost这个项目绝对值得你花时间深入了解。我第一次接触Bifrost是在…...

终极指南:如何使用League-Toolkit英雄联盟工具箱快速提升游戏效率
终极指南:如何使用League-Toolkit英雄联盟工具箱快速提升游戏效率 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 还在为英雄联盟中…...

【最新 v2.7.1 版本安装包】5 分钟搞定 OpenClaw,零基础无需命令一键部署保姆级教学
OpenClaw(小龙虾)Windows 一键部署保姆级教程 | 10 分钟搭建专属数字员工【点击下载最新OpenClaw安装包】 前言 2026 年开源圈热门 AI 智能体 OpenClaw(昵称小龙虾),GitHub 星标突破 28 万,凭借本地运行 …...
)
告别闪烁屏!瑞芯微RK3399开发板Debian系统烧写保姆级教程(含DriverAssistant v5.1.1 + AndroidTool v2.69)
RK3399开发板Debian系统烧写实战:从屏幕闪烁到完美显示的终极解决方案 当你在RK3399开发板上成功烧写Debian系统后,最期待的莫过于看到系统稳定运行的画面。然而,不少开发者却遭遇了屏幕闪烁的困扰——这个问题看似简单,背后却隐藏…...

小米汽车Q3真车现身:科技巨头跨界造车的技术路径与市场挑战
1. 项目概述:从“Q3真车现身”看小米汽车的阶段性成果最近,小米汽车项目代号“Q3”的测试车辆在公开道路上被频繁捕获,这已经不是简单的谍照,而是接近量产状态的“真车”现身。作为一名长期关注汽车产业变革,特别是科技…...

【目标检测系统网页版】基于YOLOv8的淡水鱼检测系统
【目标检测系统网页版】基于YOLOv8的淡水鱼检测系统 一、系统介绍 1、系统简介 基于YOLOv8的淡水鱼检测 Web 系统,支持单图检测、批量图片检测、视频检测与实时视频流检测。 2、功能特性 智能识别:YOLOv8 封装,单例加载,自动设…...

AI异步任务编排引擎:从原理到实战,构建可靠工作流系统
1. 项目概述:AI驱动的异步任务编排引擎在当今的软件开发领域,尤其是涉及数据处理、机器学习模型训练、自动化工作流等场景时,我们常常会面临一个核心挑战:如何高效、可靠地编排和管理一系列耗时且可能相互依赖的异步任务。传统的解…...

AI应用开发实战:从RAG系统到多模型API调用的开源项目解析
1. 项目概述:一个AI项目的开源实践最近在GitHub上看到一个名为“hferello/ai”的项目,这个标题非常简洁,甚至可以说有些“神秘”。乍一看,它可能是一个关于人工智能的通用仓库,但点进去之后,你会发现它远不…...