操作系统真象还原:编写硬盘驱动程序
第13章-编写硬盘驱动程序
这是一个网站有所有小节的代码实现,同时也包含了Bochs等文件
13.1 硬盘及分区表
13.1.1 创建从盘及获取安装的磁盘数
要实现文件系统,必须先有个磁盘介质,虽然咱们己经有个虚拟磁盘 hd60M.img,但它只充当了启动盘的作用,仅用来存储内核,是个没有文件系统的裸盘( raw disk)
如同我们之前第一章创建主盘时一样,在bochs目录下:
创建磁盘
bin/bximage
然后在输入框依次输入以下,输入一个,按一次回车
1
hd
flat
80
hd80M.img
接下来,我们在bochsrc.disk文件中,写入
ata0-slave: type=disk, path="hd80M.img", mode=flat,cylinders=162,heads=16,spt=63
这样,bochs虚拟机启动时,就会识别这个磁盘并且自动挂载。
xp:用来查看物理地址处的值,eg:xp/b 0x475查看0x475处一个字节的值。这个0x475处存储的是主机上安装的硬盘数量。下面是成功安装了两个硬盘:

13.1.2 创建磁盘分区表
**文件系统是运行在操作系统中的软件模块,是操作系统提供的一套管理磁盘文件读写的方法和数据组织、存储形式,**因此,文件系统=数据结构+算法,哈哈,所以它是程序。它的管理对象是文件,管辖范围是分区,因此它建立在分区的基础上,每个分区都可以有不同的文件系统。咱们刚创建了磁盘而己,磁盘还是裸盘,即传说中的 raw disk,本节的任务是把刚创建的磁盘 hd80M.img 分区。
磁盘的物理结构:
- 盘片:类似光盘中的一个圆盘,上面布满了磁性介质。
- 扇区:扇区是硬盘读写的基本单位,它在磁道上均匀分布,与磁头和磁道不同,扇区从 1 开始编号扇区的大小字节数=256 × N. N为自然数,通常取2,因此扇区的大小为512字节
- 磁道:盘片上的一个个同心圈就是磁道,它是扇区的载体,每一个磁道由外向里从 0 开始编号
- 磁头:就是磁头,哈哈,可以粗略理解为磁带中的磁头一个盘片分为上下两个面,各面都有一个磁头,因此一个盘片包括两个磁头,磁头号就表示盘面,平时所说的盘面号就是磁头号
- 柱面:这些由不同盘面上的编号相同的磁道(这些编号相同的同心圆大小一致)从上到下所组成的圆柱体的回转面就称为柱面,因此柱面的大小等于盘面数(磁头数〉乘以每磁道扇区数。
- 分区:是由多个编号连续的柱面组成的,因此分区在物理上的表现是由某段范围内的所有柱面组成的通心环,并不是像“饼图”那种逻辑表示,当然若整个硬盘只有 1 个分区,那这个分区就是个所有柱面组成的圆柱体 。 分区不能跨柱面,也就是同一个柱面不能包含两个分区,一个柱面只属于一个分区,分区的起始和终止都落在完整的柱面上,并不会出现多个分区共享同一柱面的情况,这就是所谓的“分区粒度”。

- 硬盘容量=单片容量 x 磁头数;
- 单片容量=每磁道扇区数 x 磁道数 x 512;
磁道数又等于柱面数:硬盘容量=每磁道扇区数 x 柱面数 x 512 x 磁头数;
下面是hd80M.img的分区布局图:

13.2 编写硬盘驱动程序
13.2.1 硬盘初始化
硬件是实实在在的东西,要想在软件中管理它们,只能从逻辑上抓住这些硬件的特性,将它们抽象成一些数据结构,然后这些数据结构便代表了硬件,用这些数据结构来组织硬件的信息及状态,在逻辑上硬件就是这数据结构。硬盘也是“实在”的东东,为了管理它们还是得将它们抽象成某些数据结构,这就是本节的任务之一。
硬盘上有两个 ata 通道,也称为 IDE 通道。第 1 个 ata 通道上的两个硬盘(主和从)的中断信号挂在 8259A 从片的 IRQ14 上,第 2 个 ata 通道接在 8259A 从片的 IRQ15 上,该 ata 通道上可支持两个硬盘 。 来自 8259A从片的中断是由 8259A 主片帮忙向处理器传达的, 8259A 从片是级联在 8259A 主片的 IRQ2 接口的,因此为了让处理器也响应来自 8259A 从片的中断,屏蔽中断寄存器必须也把 IRQ2 打开.
由于我们的两个磁盘都是挂在了IDE通道0上,而IDE通道0又是挂在了IRQ14线上,所以我们只需要再打开这条线的中断信号就行
/* 初始化可编程中断控制器8259A */
static void pic_init(void) {/* 初始化主片 */outb (PIC_M_CTRL, 0x11); // ICW1: 边沿触发,级联8259, 需要ICW4.outb (PIC_M_DATA, 0x20); // ICW2: 起始中断向量号为0x20,也就是IR[0-7] 为 0x20 ~ 0x27.outb (PIC_M_DATA, 0x04); // ICW3: IR2接从片. outb (PIC_M_DATA, 0x01); // ICW4: 8086模式, 正常EOI/* 初始化从片 */outb (PIC_S_CTRL, 0x11); // ICW1: 边沿触发,级联8259, 需要ICW4.outb (PIC_S_DATA, 0x28); // ICW2: 起始中断向量号为0x28,也就是IR[8-15] 为 0x28 ~ 0x2F.outb (PIC_S_DATA, 0x02); // ICW3: 设置从片连接到主片的IR2引脚outb (PIC_S_DATA, 0x01); // ICW4: 8086模式, 正常EOIoutb (PIC_M_DATA, 0xf8); //IRQ2用于级联从片,必须打开,否则无法响应从片上的中断主片上打开的中断有IRQ0的时钟,IRQ1的键盘和级联从片的IRQ2,其它全部关闭outb (PIC_S_DATA, 0xbf); //打开从片上的IRQ14,此引脚接收硬盘控制器的中断 put_str(" pic_init done\n");
}在以前,我们内核态下进行打印一直用的console_put_xxx之类的函数,这很不方便,因为我们经常打印信息需要调用console_put_int, console_put_str, console_put_ch这三个函数配合使用。所以我们先来实现一个类似于用户态函数printf的内核态函数printk
/** @Author: Adward-DYX 1654783946@qq.com* @Date: 2024-04-28 17:33:08* @LastEditors: Adward-DYX 1654783946@qq.com* @LastEditTime: 2024-05-06 12:59:59* @FilePath: /OS/chapter13/13.2/kernel/stdio-kernel.c* @Description: 这是默认设置,请设置`customMade`, 打开koroFileHeader查看配置 进行设置: https://github.com/OBKoro1/koro1FileHeader/wiki/%E9%85%8D%E7%BD%AE*/
#include "stdio-kernel.h"
#include "console.h"
#include "stdint.h"
#include "global.h"
#include "stdio.h"#define va_start(args, first_fix) args = (va_list)&first_fix
#define va_end(args) args = NULL/*供内核使用的格式化输出函数*/
void printk(const char* format, ...){va_list args;va_start(args, format);char buf[1024] = {0};vsprintf(buf,format,args);va_end(args);console_put_str(buf);
}
创建硬盘相关的数据结构:
/** @Author: Adward-DYX 1654783946@qq.com* @Date: 2024-04-28 17:37:39* @LastEditors: Adward-DYX 1654783946@qq.com* @LastEditTime: 2024-05-06 13:18:20* @FilePath: /OS/chapter13/13.2/device/ide.h* @Description: 这是默认设置,请设置`customMade`, 打开koroFileHeader查看配置 进行设置: https://github.com/OBKoro1/koro1FileHeader/wiki/%E9%85%8D%E7%BD%AE*/
#ifndef __DEVICE_IDE_H
#define __DEVICE_IDE_H#include "stdint.h"
#include "list.h"
#include "bitmap.h"
#include "global.h"
#include "thread.h"
#include "sync.h"struct partition{uint32_t start_lba; //起始扇区uint32_t sec_cnt; //扇区数struct disk* my_disk; //分区所属的硬盘struct list_elem part_tag; //用于队列中的标记 char name[8]; //分区名称struct super_block* sb; //本分区的超级块struct bitmap block_bitmap; //块位图struct bitmap inode_bitmap; //i结点位图struct list open_inodes; //本分区打开的i结点队列
};/*硬盘结构*/
struct disk{char name[8]; //本硬盘的名称struct ide_channel* my_channel; //此块硬盘归属于那个ide通道uint8_t dev_no; //本硬盘是主0,还是从1struct partition prim_parts[4]; //主分区顶多只有4个struct partition logic_parts[8]; //逻辑分区数量无限,但总得有个上限支持,这里设置为8
};/*ata通道*/
//port_base咱们这里只处理两个通道的主板,每个通道的
//端口范围是不一样的,通道1(Primary通道)的命令块寄存器端口范围是 Ox1FO~Ox1F7,控制块寄存器
//端口是 0x3F6,通道 2 ( Secondary 通道〉命令块寄存器端口范围是 Ox170~Ox177 ,控制块寄存器端口是0x376
//通道 l 的端口可以以 0x1F0 为基数,其命令块寄存器端口在此基数上分别加上 0~ 7 就可以了,
//控制块寄存器端口在此基数上加上 0x206,同理,通道 2 的基数就是 0xl70
struct ide_channel{char name[8]; //本ata通道名称uint16_t port_base; //本通道的起始端口号uint8_t irq_no; //本通道所用的中断号struct lock lock; //通道锁bool expecting_intr; //表示等待硬盘的中断struct semaphore disk_done; //用于阻塞、唤醒驱动程序struct disk devices[2]; //一个通道上连接两个硬盘,一主一从
};
创建并初始化
#include "stdint.h"
#include "global.h"
#include "ide.h"
#include "debug.h"
#include "sync.h"
#include "stdio.h"
#include "stdio-kernel.h"
#include "interrupt.h"
#include "memory.h"
#include "debug.h"/* 定义硬盘各寄存器的端口号,见书p126 */
#define reg_data(channel) (channel->port_base + 0)
#define reg_error(channel) (channel->port_base + 1)
#define reg_sect_cnt(channel) (channel->port_base + 2)
#define reg_lba_l(channel) (channel->port_base + 3)
#define reg_lba_m(channel) (channel->port_base + 4)
#define reg_lba_h(channel) (channel->port_base + 5)
#define reg_dev(channel) (channel->port_base + 6)
#define reg_status(channel) (channel->port_base + 7)
#define reg_cmd(channel) (reg_status(channel))
#define reg_alt_status(channel) (channel->port_base + 0x206)
#define reg_ctl(channel) reg_alt_status(channel)/* reg_alt_status寄存器的一些关键位,见书p128 */
#define BIT_STAT_BSY 0x80 // 硬盘忙
#define BIT_STAT_DRDY 0x40 // 设备准备好
#define BIT_STAT_DRQ 0x8 // 数据传输准备好了/* device寄存器的一些关键位 */
#define BIT_DEV_MBS 0xa0 // 第7位和第5位固定为1
#define BIT_DEV_LBA 0x40 //指定为LBA寻址方式
#define BIT_DEV_DEV 0x10 //指定主盘或从盘,DEV位为1表示从盘,为0表示主盘/* 一些硬盘操作的指令 */
#define CMD_IDENTIFY 0xec // identify指令
#define CMD_READ_SECTOR 0x20 // 读扇区指令
#define CMD_WRITE_SECTOR 0x30 // 写扇区指令/* 定义可读写的最大扇区数,调试用的 */
#define max_lba ((80*1024*1024/512) - 1) // 只支持80MB硬盘uint8_t channel_cnt; // 记录通道数
struct ide_channel channels[2]; // 有两个ide通道/*硬盘数据结构初始化*/
void ide_init(void){printk("ide_init start\n");uint8_t hd_cnt = *((uint8_t*)(0x475)); //获取硬盘的数量printk(" ide_init hd_cnt:%d\n",hd_cnt);ASSERT(hd_cnt > 0);list_init(&partition_list);channel_cnt = DIV_ROUND_UP(hd_cnt,2); //一个 ide 通道上有两个硬盘,根据硬盘数量反推有几个 ide 通道struct ide_channel* channel;uint8_t channel_no = 0, dev_no = 0;/*处理每个通道上的硬盘*/while(channel_no < channel_cnt){channel = &channels[channel_no];sprintf(channel->name,"ide%d",channel_no);/*为每个 ide 通道初始化端口基址及中断向量*/switch(channel_no){case 0:channel->port_base = 0x1f0; //ide0通道的起始端口号是0x1f0channel->irq_no = 0x20+14; //从片8259A上倒数第二个中断引脚 硬盘,也就是ide0通道的中断向量号 , 0x20为起始中断号break;case 1:channel->port_base = 0x170; //ide1通道的起始端口号是0x170channel->irq_no = 0x20+15; //从片上最后一个中断引脚,我们用来相应ide1通道上的硬盘中断break;}channel->expecting_intr = false; //未向硬盘写入指令时不期待硬盘的中断lock_init(&channel->lock);/*初始化为0,目的是向硬盘控制器请求数据后,硬盘驱动sema_down此信号量会阻塞线程,直到硬盘完成后通过发中断,由中断处理程序将此信号量sema_up,唤醒线程*/sema_init(&channel->disk_done,0);register_handler(channel->irq_no,intr_hd_handler);/*分别获取两个硬盘的参数及分区*/while(dev_no < 2){struct disk* hd = &channel->devices[dev_no];hd->my_channel = channel;hd->dev_no = dev_no;sprintf(hd->name,"sd%c",'a'+channel_no*2+dev_no);identify_disk(hd);//获取硬盘参数if(dev_no!=0){ //内核本身的裸硬盘(hd60M.img)不处理partition_scan(hd,0); //扫描该硬盘上的分区}p_no=0,l_no=0;dev_no++;}dev_no = 0;channel_no++; //下一个channel}printk("\n all partition info\n");/*打印所有分区信息*/list_traversal(&partition_list,partition_info,(int)NULL);printk("ide_init done\n");
}
在物理地址0x475存储着主机上安装的硬盘数量,它是由BIOS检测并写入的。
13.2.2 实现thread_yied和idle线程
thread_yield 定义在也read.c 中,它的功能是主动把 CPU 使用权让出来,它与thread_block 的区别是thread_yield 执行后任务的状态是 TASK_READY,即让出 CPU 后,它会被加入到就绪队列中,下次还能继续被调度器调度执行,而 thread_block 执行后任务的状态是 TASK_BLOCKD,需要被唤醒后才能加入到就绪队列 , 所以下次执行还不知道是什么时候 。
硬盘是一个相对于CPU来说及其低速的设备,所以,当硬盘在进行需要长时间才能完成的工作时(比如写入数据),我们最好能让驱动程序把CPU让给其他任务。所以,我们来实现一个thread_yield函数,就是用于把CPU让出来。实质就是将调用者重新放入就绪队列队尾。
修改thread.c
/* 主动让出cpu,换其它线程运行 */
void thread_yield(void) {struct task_struct* cur = running_thread(); enum intr_status old_status = intr_disable();ASSERT(!elem_find(&thread_ready_list, &cur->general_tag));list_append(&thread_ready_list, &cur->general_tag);cur->status = TASK_READY;schedule();intr_set_status(old_status);
}thread_yield中有个关中断的操作,会不会导致切换后由于关闭中断,而不响应时钟中断导致一直运行在切换后的进程/线程中呢?其实并不会,我们讨论两种情况,一种是进程/线程第一次上机运行,一种是进程/线程之前已经运行过,但由于时间片到期而换下过处理器。对于前者,我们进程/线程第一次上机运行都会经过kernel_thread这个线程启动器,而这个里面是有开中断的代码的。对于后者,当切换回进程/线程时,它们执行kernel.S中的中断退出代码jmp intr_exit,这里面有一条指令iretd会打开中断,让处理器能够继续响应中断代理发送来的中断信号。
接下来我们实现一个idle线程,用于在就绪队列为空时运行。需要注意一点:我们之前没有idle线程,我们的系统没有出现书上说的由于就绪队列为空然后被ASSERT(!list_empty(&thread_ready_list);悬停的情况,是因为我们的主线程(简单理解,就是main函数里面的while(1))会一直被不断加入就绪队列,所以就绪队列并不存在为空的时候。
修改thread.c
struct task_struct* idle_thread; // idle线程/* 系统空闲时运行的线程 */
static void idle(void* arg UNUSED) {while(1) {thread_block(TASK_BLOCKED); //执行hlt时必须要保证目前处在开中断的情况下,hlt是停止处理器将进入暂停状态,直到发生硬件中断asm volatile ("sti; hlt" : : : "memory");}
}/* 实现任务调度 */
void schedule() {ASSERT(intr_get_status() == INTR_OFF);struct task_struct* cur = running_thread(); if (cur->status == TASK_RUNNING) { // 若此线程只是cpu时间片到了,将其加入到就绪队列尾ASSERT(!elem_find(&thread_ready_list, &cur->general_tag));list_append(&thread_ready_list, &cur->general_tag);cur->ticks = cur->priority; // 重新将当前线程的ticks再重置为其priority;cur->status = TASK_READY;} else { /* 若此线程需要某事件发生后才能继续上cpu运行,不需要将其加入队列,因为当前线程不在就绪队列中。*/}/* 如果就绪队列中没有可运行的任务,就唤醒idle */if (list_empty(&thread_ready_list)) {thread_unblock(idle_thread);}ASSERT(!list_empty(&thread_ready_list));thread_tag = NULL; // thread_tag清空
/* 将thread_ready_list队列中的第一个就绪线程弹出,准备将其调度上cpu. */thread_tag = list_pop(&thread_ready_list); struct task_struct* next = elem2entry(struct task_struct, general_tag, thread_tag);next->status = TASK_RUNNING;process_activate(next); //激活任务页表switch_to(cur, next);
}/* 初始化线程环境 */
void thread_init(void) {put_str("thread_init start\n");list_init(&thread_ready_list);list_init(&thread_all_list);lock_init(&pid_lock);
/* 将当前main函数创建为线程 */make_main_thread();/* 创建idle线程 */idle_thread = thread_start("idle", 10, idle, NULL);put_str("thread_init done\n");
}13.2.3 实现简单的休眠函数
硬盘和 CPU 是相互独立的个体,它们各自并行执行,但由于硬盘是低速设备,其在处理请求时往往消耗很长的时间(不过手册上说最慢的情况也能在 31 秒之内完成),为避免浪费 CPU 资源,在等待硬盘操作的过程中最好把 CPU 主动让出来,让 CPU 去执行其他任务,为实现这种“明智”的行为,我们在 timer.c中定义休眠函数,当然这只是简易版,精度不是很高,能达到目的就可以了
之前我们实现的thread_yield是将当前任务加入就绪队列队尾,仅仅是把CPU让出来一次。我们来实现一个定时让出CPU的函数,也就是让一个任务在固定时间内都不执行。
修改timer.c
#define mil_seconds_per_intr (1000 / IRQ0_FREQUENCY)/* 以tick为单位的sleep,任何时间形式的sleep会转换此ticks形式 */
static void ticks_to_sleep(uint32_t sleep_ticks) {uint32_t start_tick = ticks;/* 若间隔的ticks数不够便让出cpu */while (ticks - start_tick < sleep_ticks) {thread_yield();}
}/* 以毫秒为单位的sleep 1秒= 1000毫秒 */
void mtime_sleep(uint32_t m_seconds) {uint32_t sleep_ticks = DIV_ROUND_UP(m_seconds, mil_seconds_per_intr);ASSERT(sleep_ticks > 0);ticks_to_sleep(sleep_ticks);
}
13.2.4 完善硬盘驱动程序

现在,我们来实现驱动程序的主体部分,也就是实际与硬盘打交道的函数,实质就是将一系列寄存器操作进行封装
/** @Author: Adward-DYX 1654783946@qq.com* @Date: 2024-04-29 09:54:07* @LastEditors: Adward-DYX 1654783946@qq.com* @LastEditTime: 2024-05-06 13:17:42* @FilePath: /OS/chapter13/13.2/device/ide.c* @Description: 这是默认设置,请设置`customMade`, 打开koroFileHeader查看配置 进行设置: https://github.com/OBKoro1/koro1FileHeader/wiki/%E9%85%8D%E7%BD%AE*/
#include "ide.h"
#include "stdint.h"
#include "global.h"
#include "list.h"
#include "bitmap.h"
#include "debug.h"
#include "stdio.h"
#include "thread.h"
#include "sync.h"
#include "io.h"
#include "timer.h"
#include "string.h"
#include "stdio-kernel.h"/*定义硬盘各寄存器的端口号*/
#define reg_data(charnnel) (charnnel->port_base + 0)
#define reg_error(charnnel) (charnnel->port_base + 1)
#define reg_sect_cnt(charnnel) (charnnel->port_base + 2)
#define reg_lba_l(charnnel) (charnnel->port_base + 3)
#define reg_lba_m(charnnel) (charnnel->port_base + 4)
#define reg_lba_h(charnnel) (charnnel->port_base + 5)
#define reg_dev(charnnel) (charnnel->port_base + 6)
#define reg_status(charnnel) (charnnel->port_base + 7)
#define reg_cmd(charnnel) (reg_status(charnnel))
#define reg_alt_status(charnnel) (charnnel->port_base + 0x206)
#define reg_ctl(charnnel) (reg_alt_status(charnnel))/*reg_alt_status寄存器的一些关键位*/
#define BIT_ALT_STAT_BSY 0x80 //硬盘忙
#define BIT_ALT_STAT_DRDY 0x40 //驱动器准备好了
#define BIT_ALT_STAT_DRQ 0x8 //数据传输准备好了
#define BIT_ALT_STAT_ERR 0x1 //有错误发生/*device寄存器的一些关键位*/
#define BIT_DEV_MBS 0xa0 //第7位和第5位固定位1
#define BIT_DEV_LBA 0x40 //指定为LBA寻址方式
#define BIT_DEV_DEV 0x10 //主盘还是从盘 现在为1是从盘,为0表示主盘/*一些硬盘操作的指令*/
#define CMD_IDENTIFY 0xec //identify指令,即硬盘识别
#define CMD_READ_SECTOR 0x20 //读扇区指令
#define CMD_WRITE_SECTOR 0x30 //写扇区指令/*定义可读写的最大扇区数,调试用的*/
#define max_lba ((80*1024*1024/512)-1) //只支持80M硬盘uint8_t channel_cnt; //按硬盘数计算的通道数
struct ide_channel channels[2]; //有两个ide通道/*选择读写的硬盘*/
static void select_disk(struct disk* hd){uint8_t reg_device = BIT_DEV_MBS | BIT_DEV_LBA;if(hd->dev_no == 1){ //若是从盘就置 DEV 位为 1reg_device |= BIT_DEV_DEV;}outb(reg_dev(hd->my_channel),reg_device);
}/*向硬盘控制器写入起始扇区地址及腰读写的扇区数*/
static void select_sector(struct disk* hd, uint32_t lba, uint8_t sec_cnt){ASSERT(lba <= max_lba);struct ide_channel* channel = hd->my_channel;/*写入要读写的扇区数*/outb(reg_sect_cnt(channel),sec_cnt); //如果 sec_cnt 为 0 ,贝Jj表示写入 256 个扇区/*写入lba地址,即扇区号*/outb(reg_lba_l(channel),lba); //lba 地址的低8位,不用单独取出低8位,outb 函数中的汇编指令 outb %b0,%w1会只用aloutb(reg_lba_m(channel),lba>>8); //lba地址的8-15位outb(reg_lba_h(channel),lba>>16); //lba地址的16-23位/*因为 lba 地址的第 24 ~27 位要存储在 device 寄存器的0-3 位,无法单独写入这 4 位,所以在此处把 device 寄存器再重新写入一次*/outb(reg_dev(channel),BIT_DEV_MBS|BIT_DEV_LBA|(hd->dev_no==1 ? BIT_DEV_DEV : 0)|lba>>24);
}/*向通道channel发命令cmd*/
static void cmd_out(struct ide_channel* channel,uint8_t cmd){/*要向硬盘发出了命令便将此标记置为true,硬盘中断处理程序需要根据它来判断*/channel->expecting_intr = true;outb(reg_cmd(channel),cmd);
}/*硬盘读入sec_cnt个扇区的数据到buf*/
static void read_from_sector(struct disk* hd, void* buf, uint8_t sec_cnt){uint32_t size_in_byte;if(sec_cnt==0){/*因为 sec_cnt 是自位变量,由主调函数将其赋值时,若为 256 则将最高位的 1 丢掉变为 0*/size_in_byte = 256 * 512;}else{size_in_byte = sec_cnt * 512;}insw(reg_data(hd->my_channel),buf,size_in_byte / 2);
}/*将buf中国的sec_cnt扇区的数据写入硬盘*/
static void write2sector(struct disk* hd, void* buf, uint8_t sec_cnt){uint32_t size_in_byte;if(sec_cnt==0){/*因为 sec_cnt 是自位变量,由主调函数将其赋值时,若为 256 则将最高位的 1 丢掉变为 0*/size_in_byte = 256 * 512;}else{size_in_byte = sec_cnt * 512;}outsw(reg_data(hd->my_channel),buf,size_in_byte/2);
}/*等待30秒*/
static bool busy_wait(struct disk* hd){struct ide_channel* channel = hd->my_channel;uint16_t time_limit = 30 * 1000; //等待30000毫秒while(time_limit -= 10 >= 0){if(!(inb(reg_status(channel))&BIT_ALT_STAT_BSY))return (inb(reg_status(channel))&BIT_ALT_STAT_DRQ);else mtime_sleep(10); //睡眠10毫秒}return false;
}/*硬盘读取 sec_cnt 个扇区到buf*/
void ide_read(struct disk* hd, uint32_t lba, void* buf, uint32_t sec_cnt){ASSERT(lba <= max_lba);ASSERT(sec_cnt > 0);lock_acquire(&hd->my_channel->lock);/*1先选择操作的硬盘*/select_disk(hd);uint32_t secs_op; //每次操作的扇区数uint32_t secs_done = 0; //已完成的扇区数while(secs_done < sec_cnt){if((secs_done+256)<=sec_cnt)secs_op = 256;else secs_op = sec_cnt - secs_done;/*2写入待读入的扇区数和起始扇区号*/select_sector(hd,lba+secs_done,secs_op);/*3执行的命令写入reg_cmd寄存器*/cmd_out(hd->my_channel,CMD_READ_SECTOR); //准备开始读取数据/******************* 阻塞自己的时机 ***************************** 在硬盘已经开始工作(开始在内部读数据或写数据)后才能阻塞自己,* 现在硬盘已经开始忙了,将自己阻塞,等待硬盘完成读操作后通过中断处理程序唤醒自己*//*硬盘完成操作后会发中断信号,后面介绍的硬盘中断处理程序 intr_hd_handler 会在该通道上执行“ sema_up(&channel->disk_done)”,从而唤醒当前的驱动程序*/sema_down(&hd->my_channel->disk_done);/*4 检查硬盘转改是否可读*//*醒来后开始执行下面的代码*/if(!busy_wait(hd)){ //若失败char error[64];sprintf(error,"%s read sector %d failed!!!!!!",hd->name,lba);PANIC(error);}/*5 把数据从硬盘的缓冲区读出*/read_from_sector(hd,(void*)((uint32_t)buf + secs_done * 512),secs_op);secs_done += secs_op;}lock_release(&hd->my_channel->lock);
}/*对于读硬盘来说,驱动程序阻塞自己是在硬盘开始读扇区之后,对于写硬盘来说,
驱动程序阻塞自己是在硬盘开始写扇区之后。总之,阻塞的时机一定是在硬盘开始真正忙活之后的那段“漫
长”的时间里*//*将buf中sec_cnt扇区数据写入硬盘*/
void ide_write(struct disk* hd, uint32_t lba, void* buf, uint32_t sec_cnt){ASSERT(lba<=max_lba);ASSERT(sec_cnt>0);lock_acquire(&hd->my_channel->lock);/*1.线选择操作的硬盘*/select_disk(hd);uint32_t secs_op; //每次操作的扇区数uint32_t secs_done = 0; //已经完成的扇区数while(secs_done < sec_cnt){if((secs_done+256)<=sec_cnt)secs_op = 256;else secs_op = sec_cnt - secs_done;/*2 写入待写入的扇区数和起始扇区号*/select_sector(hd, lba+secs_done, secs_op);/*3 执行的命令写入reg_cmd寄存器*/cmd_out(hd->my_channel,CMD_WRITE_SECTOR);/*4 检查硬盘状态是否可写*/if(!busy_wait(hd)){ //若失败char error[64];sprintf(error,"%s write sector %d failed!!!!!!",hd->name,lba);PANIC(error);}/*5 把数据从硬盘的缓冲区写进去*/write2sector(hd, (void*)((uint32_t)buf + secs_done * 512),secs_op);/*在硬盘响应期间阻塞自己*/sema_down(&hd->my_channel->disk_done);secs_done += secs_op;}/*醒来后开始释放锁*/lock_release(&hd->my_channel->lock);
}/*硬盘中断处理程序*/
void intr_hd_handler(uint8_t irq_no){ASSERT(irq_no == 0x2e || irq_no == 0x2f);uint8_t ch_no = irq_no - 0x2e;struct ide_channel* channel = &channels[ch_no];ASSERT(channel->irq_no == irq_no);/*不必担心此中断是否对应的是这一次的 expecting_intr,每次读写硬盘时会申请锁,从而保证了同步一致性*/if(channel->expecting_intr){channel->expecting_intr = false;sema_up(&channel->disk_done);/*读取状态寄存器使硬盘控制器认为此次的中断已被处理,从而硬盘可以继续执行新的读写*/inb(reg_status(channel));}
}/*硬盘数据结构初始化*/
void ide_init(void){printk("ide_init start\n");uint8_t hd_cnt = *((uint8_t*)(0x475)); //获取硬盘的数量printk(" ide_init hd_cnt:%d\n",hd_cnt);ASSERT(hd_cnt > 0);list_init(&partition_list);channel_cnt = DIV_ROUND_UP(hd_cnt,2); //一个 ide 通道上有两个硬盘,根据硬盘数量反推有几个 ide 通道struct ide_channel* channel;uint8_t channel_no = 0, dev_no = 0;/*处理每个通道上的硬盘*/while(channel_no < channel_cnt){channel = &channels[channel_no];sprintf(channel->name,"ide%d",channel_no);/*为每个 ide 通道初始化端口基址及中断向量*/switch(channel_no){case 0:channel->port_base = 0x1f0; //ide0通道的起始端口号是0x1f0channel->irq_no = 0x20+14; //从片8259A上倒数第二个中断引脚 硬盘,也就是ide0通道的中断向量号 , 0x20为起始中断号break;case 1:channel->port_base = 0x170; //ide1通道的起始端口号是0x170channel->irq_no = 0x20+15; //从片上最后一个中断引脚,我们用来相应ide1通道上的硬盘中断break;}channel->expecting_intr = false; //未向硬盘写入指令时不期待硬盘的中断lock_init(&channel->lock);/*初始化为0,目的是向硬盘控制器请求数据后,硬盘驱动sema_down此信号量会阻塞线程,直到硬盘完成后通过发中断,由中断处理程序将此信号量sema_up,唤醒线程*/sema_init(&channel->disk_done,0);register_handler(channel->irq_no,intr_hd_handler);/*分别获取两个硬盘的参数及分区*/while(dev_no < 2){struct disk* hd = &channel->devices[dev_no];hd->my_channel = channel;hd->dev_no = dev_no;sprintf(hd->name,"sd%c",'a'+channel_no*2+dev_no);identify_disk(hd);//获取硬盘参数if(dev_no!=0){ //内核本身的裸硬盘(hd60M.img)不处理partition_scan(hd,0); //扫描该硬盘上的分区}p_no=0,l_no=0;dev_no++;}dev_no = 0;channel_no++; //下一个channel}printk("\n all partition info\n");/*打印所有分区信息*/list_traversal(&partition_list,partition_info,(int)NULL);printk("ide_init done\n");
}
select_disk接受一个参数,硬盘指针hd,功能是选择待操作的硬盘是主盘或从盘 。原理是利用device寄存器中的 dev 位,该位为 0 表示是通道中的主盘,为 1 表示是通道的从盘。最后通过 outb 函数将变量 reg_device 写入硬盘所在通道的device 寄存器,这样就完成了主盘或从盘的选择。
select_sector接受3个参数,硬盘指针hd、扇区起始地址lba、扇区数sec_cnt,功能是向硬盘控制器写入起始扇区地址及要读写的扇区数 。
cmd_out:向通道channel发命令cmd,即写入操作命令(读或者写)
read_from_sector:硬盘读入sec_cnt个扇区的数据到buf
write2sector:将buf中的sec_cnt扇区的数据写入硬盘
busy_wait :通过BIT_ALT_STAT_BSY 判断 status 寄存器的 BSY 位是否为 1 ,如果为 1 ,则表示硬盘繁,这时候就调用 mtime_sleep(10)去休眠 10 毫秒。如果 BSY 位为 0 则表示硬盘不忙,接着在再次读取status寄存器,返回其 DRQ 位的值, DRQ 位为 1 表示硬盘己经准备好数据了。
对于读硬盘来说,驱动程序阻塞自己是在硬盘开始读扇区之后,对于写硬盘来说,驱动程序阻塞自己是在硬盘开始写扇区之后。总之,阻塞的时机一定是在硬盘开始真正忙活之后的那段“漫长”的时间里
13.2.5 获取硬盘信息,扫描分区表
本节该是检验它们的时候了,咱们用两件工作来验证,一是向硬盘发 identify 命令获取硬盘的信息,二是扫描分区表。

Linux中所有的设备都在/dev/目录下,硬盘命名规则是[x]d[y][n],其中只有字母 d 是固定的,其他带中括号的字符都是多选值,下面从左到右介绍各个字符。
x:表示硬盘分类,硬盘有两大类, IDE 磁盘和 SCSI 磁盘。h代表 IDE 磁盘, s代表 SCSI 磁盘,故 x取值为h和s.
d:表示disk,即磁盘
y:表示设备号,更多操作以区分第几个设备,取值范围是小写字符,其中a是第1个硬盘,b是第2个硬盘依此类推。
n:表示分区号。也就是一个硬盘上的第几个分区。分区以数字 1开始,依次类推。
咱们这里统一用 SCSI 硬盘的命名规则来命名虚拟硬盘hd60M.img 和 hd80M且恕。其中 hd60M.img 为 sda, hd80M.img 为 sdb o hd60M.img 是裸盘,没有文件系统和分区,因此咱们只处理 hd80M.img,将其上的主分区占据 sdb【1 ~4】,逻辑分区占据 sdb【5~】。
修改ide.c
/*用于记录总扩展分区的起始 lba ,初始为 O, partition_scan 时以此为标记*/
int32_t ext_lba_base = 0;
uint8_t p_no = 0, l_no = 0; //用来记录硬盘主分区和逻辑分区的下标
struct list partition_list; //分区队列/*构建一个 16 字节大小的结构体,用来存分区表项*/
struct partition_table_entry{uint8_t bootable; //是否可引导uint8_t start_head; //起始磁头号uint8_t start_sec; //起始扇区号uint8_t start_chs; //起始柱面号uint8_t fs_type; //分区类型uint8_t end_head; //结束磁头号uint8_t end_sec; //结束扇区号uint8_t end_chs; //结束柱面号/*更需要关注的时下面这两项*/uint32_t start_lba; //本分区起始扇区的 lba 地址uint32_t sec_cnt; //本分区的扇区数目
}__attribute__ ((packed)); //保证此结构是16字节大小/*引导扇区,mbr或ebr所在扇区*/
struct boot_sector{uint8_t other[446]; //引导代码struct partition_table_entry partition_table[4]; //分区表中有四项,供六十四字节uint16_t signature; //启动扇区的结束标志是 Ox55,0xaa,
}__attribute__ ((packed));/*将dst中len个相邻字节交换位置后存入buf*/
static void swap_pairs_bytes(const char* dst, char* buf, uint32_t len){uint8_t idx;for(idx=0;idx<len;idx+=2){/*buf中存储dst中两相邻袁术交换位置后的字符串*/buf[idx+1] = *dst++;buf[idx] = *dst++;}buf[idx] = '\0';
}/*获取硬盘参数信息*/
static void identify_disk(struct disk* hd){char id_info[512];select_disk(hd);cmd_out(hd->my_channel,CMD_IDENTIFY);/*向硬盘发送指令后便通过信号量阻塞自己,待硬盘处理完成后,通过中断处理程序将自己唤醒*/sema_down(&hd->my_channel->disk_done);/*醒来后开始执行下面的代码*/if(!busy_wait(hd)){ //若失败char error[64];sprintf(error,"%s identify failed!!!!!!",hd->name);PANIC(error);}read_from_sector(hd,id_info,1);char buf[64];uint8_t sn_start = 10*2, sn_len = 20, md_start = 27*2, md_len = 40;swap_pairs_bytes(&id_info[sn_start],buf,sn_len);printk(" disk %s info:\n SN: %s\n",hd->name,buf);memset(buf,0,sizeof(buf));swap_pairs_bytes(&id_info[md_start],buf,md_len);printk(" MODULE: %s\n",buf);uint32_t sectors = *(uint32_t*)&id_info[60 * 2];printk(" SECTORS: %d\n",sectors);printk(" CAPACITY: %dMB\n",sectors*512/1024/1024);
}/*扫描硬盘 hd 中地址为 ext_lba 的扇区中的所有分区*/
static void partition_scan(struct disk* hd, uint32_t ext_lba){struct boot_sector* bs = sys_malloc(sizeof(struct boot_sector));ide_read(hd, ext_lba, bs, 1);uint8_t part_idx = 0;struct partition_table_entry* p = bs->partition_table;/*遍历分区表4个分区表项*/while(part_idx++<4){if(p->fs_type == 0x5){ //若为扩展分区if(ext_lba_base!=0){/*子扩展分区的 start_lba 是相对于主引导扇区中的总扩展分区地址*/partition_scan(hd,p->start_lba + ext_lba_base);}else{//ext_lba_base为0表示是第一次读取引导块,页就是主引导记录所在的扇区/*记录下扩展分区的起始lba地址,后面所有扩展分区地址都相对于此*/ext_lba_base = p->start_lba;partition_scan(hd,p->start_lba);}}else if(p->fs_type != 0){ //若是有效分区类型if(ext_lba == 0){ //此时全是主分区hd->prim_parts[p_no].start_lba = ext_lba + p->start_lba;hd->prim_parts[p_no].sec_cnt = p->sec_cnt;hd->prim_parts[p_no].my_disk = hd;list_append(&partition_list,&hd->prim_parts[p_no].part_tag);sprintf(hd->prim_parts[p_no].name,"%s%d",hd->name,p_no+1);p_no++;ASSERT(p_no < 4); //0,1,2,3}else{ //逻辑分区hd->logic_parts[l_no].start_lba = ext_lba + p->start_lba;hd->logic_parts[l_no].sec_cnt = p->sec_cnt;hd->logic_parts[l_no].my_disk = hd;list_append(&partition_list, &hd->logic_parts[l_no].part_tag);sprintf(hd->logic_parts[l_no].name, "%s%d", hd->name, l_no + 5); // 逻辑分区数字是从5开始,主分区是1~4.l_no++;if (l_no >= 8) // 只支持8个逻辑分区,避免数组越界return;} }p++;}sys_free(bs);
}/*打印分区信息*/
static bool partition_info(struct list_elem* pelem, int arg UNUSED){struct partition* part = elem2entry(struct partition, part_tag, pelem);printk(" %s start_lba:0x%x,sec_cnt:0x%x\n",part->name,part->start_lba,part->sec_cnt);/*在此处 return false与函数本身功能无关,只是为了让主调函数 list_traversal 继续向下遍历元素*/return false;
}
swap_pairs_bytes:用来处理identify命令的返回信息,硬盘参数信息是以字为单位的,包括偏移、长度的单位都是字,在这16位的字中,相邻字符的位置是互换的,所以通过此函数来做转换。
相关文章:
操作系统真象还原:编写硬盘驱动程序
第13章-编写硬盘驱动程序 这是一个网站有所有小节的代码实现,同时也包含了Bochs等文件 13.1 硬盘及分区表 13.1.1 创建从盘及获取安装的磁盘数 要实现文件系统,必须先有个磁盘介质,虽然咱们己经有个虚拟磁盘 hd60M.img,但它只…...
)
firewalld防火墙(二)
一:firewalld高级配置 1:关于iptables的知识 iptables 是Linux系统中传统的命令行防火墙管理工具,它基于内核的netfilter框架工作,用于配置和管理网络规则集,比如过滤(允许/拒绝)进出的数据包…...

Android-悬浮窗口
在Android系统中,如果应用需要弹出一个悬浮窗口,就需要申请一项特殊权限 <uses-permission android:name"android.permission.SYSTEM_ALERT_WINDOW"/>在Android O之前的系统中申请了该权限后,再给对应的window设置 WindowM…...

打破僵局:Foxit Reader无法打开的终极解决方案
打破僵局:Foxit Reader无法打开的终极解决方案 在数字化阅读时代,Foxit Reader作为一款广受欢迎的PDF阅读器,其打不开的问题无疑会给用户带来诸多不便。本文将为您提供全面的解决方案,从基础检查到高级技巧,确保您能够…...

[调试] JTAG下运行正常,从QSPI或者SD卡启动则无响应,如何查找问题
[调试] JTAG下运行正常,从QSPI或者SD卡启动则无响应,如何查找问题 一、问题现象二、用自定义fsbl替代系统默认的fsbl1. 新建fsbl_new2. 如果提示缺少xilffs库3. 使能调试信息输出 三. 启动成功和失败情况下的典型输出1. JTAG启动模式: 正常加载2. QSPI启…...

Linux内核 -- 多线程之wait_event用法
Linux Kernel 中 wait_event 的高级用法及注意事项 在Linux内核编程中,wait_event 系列函数是用于实现进程等待和事件通知机制的重要工具。本文将详细介绍 wait_event 的高级用法以及注意事项。 1. 基本用法 wait_event 系列宏主要包括以下几种形式: …...
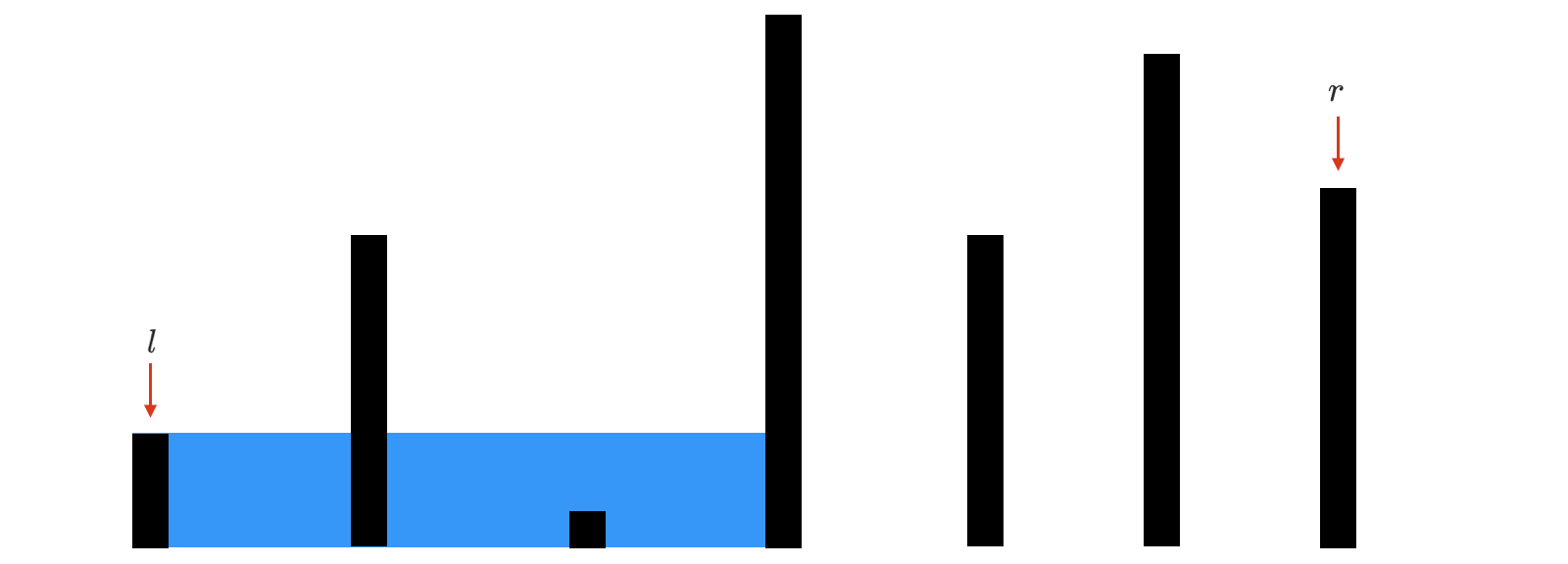
双指针系列第 8 篇:盛水最多的容器。几句话讲明白!
Leetcode 题目链接 思路 取首尾双指针和水量如下所示,设高度函数为 h ( i ) h(i) h(i),在下图中 h ( l ) < h ( r ) h(l) < h(r) h(l)<h(r)。 观察以 l l l 为左边界所能构成的其他水量,与矮的右边界搭配结果如下。 与高的…...

c++高阶-1-模板
文章目录 模板一、模板基本语法二、函数模板1.基本语法2.函数模板注意事项3.普通函数和函数模板区别4.普通函数和函数模板调用规则 三、类模板1.基本语法2.类模板和函数模板的区别3.类模板中成员函数调用时机4.类模板对象做函数参数5.类模板与继承6.成员函数的类外实现 模板 一…...

.net core 的 winform 的 浏览器控件 WebView2
在.NET Core WinForms应用程序中,没有直接的“浏览器控件”,因为WinForms不支持像WebBrowser控件那样的功能。但是,你可以使用WebView2控件,它是一个基于Chromium的浏览器内核,可以在WinForms应用程序中嵌入Web内容。 …...
Django QuerySet对象,all()方法
all()方法 在Django中,all()方法是QuerySet对象的一个方法,用于获取模型的所有实例。 当你调用ModelName.objects.all()时,Django会生成一个SQL查询,从数据库中获取该模型的所有记录,并返回一个QuerySet对象…...

自动生成网站sitemap
要在 Next.js 和 Contentlayer 项目中实现自动生成 Sitemap 的功能,你可以编写一个脚本,在每次生成文档后自动生成 Sitemap。以下是一个示例脚本,你可以根据自己的需求进行调整。 步骤 1:安装必要的依赖 首先,你需要…...

中国经济昆虫志(55卷)
中国经济昆虫志,共55卷,内容包括概述、形态特征、分类等。各级分类单元均编有检索表,每个种有特征描述、地理分布,有的还记载有生活习性和防治方法。为便于鉴定,绘制有特征图和彩色图。 包括鞘翅目天牛科、半翅目蝽科、…...

linux环境安装elasticsearch缓存数据库和Kibana客户端
linux环境安装elasticsearch缓存数据库,今天我们安装7.17.18版本,并分析遇到的问题。 一、elasticsearch安装运行 1、直接下载 wget https://artifacts.elastic.co/downloads/elasticsearch/elasticsearch-7.17.18-linux-x86_64.tar.gz2、解压 tar -…...

OpenSSL的一些使用案例
目录 一、介绍 二、基本使用 1、Shell (1)文件加解密 (2)生成密钥文件 2、API (1)md5sum (2)AES256加解密 一、介绍 本篇博客重点不是详细描述 OpenSSL 的用法,只…...
常用字符串方法<python>
导言 在python中内置了许多的字符串方法,使用字符串方法可以方便快捷解决很多问题,所以本文将要介绍一些常用的字符串方法。 目录 导言 string.center(width[,fillchar]) string.capitalize() string.count(sub[,start[,end]]) string.join(iterabl…...
线程池666666
1. 作用 线程池内部维护了多个工作线程,每个工作线程都会去任务队列中拿取任务并执行,当执行完一个任务后不是马上销毁,而是继续保留执行其它任务。显然,线程池提高了多线程的复用率,减少了创建和销毁线程的时间。 2…...
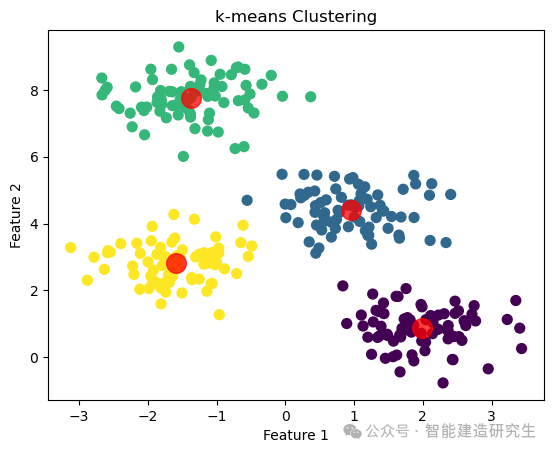
Python28-5 k-means算法
k-means 算法介绍 k-means 算法是一种经典的聚类算法,其目的是将数据集分成 ( k ) 个不同的簇,每个簇内的数据点尽可能接近。算法的基本思想是通过反复迭代优化簇中心的位置,使得每个簇内的点与簇中心的距离之和最小。k-means 算法的具体步骤…...

主流国产服务器操作系统技术分析
主流国产服务器操作系统 信创 "信创",即信息技术应用创新,作为科技自立自强的核心词汇,在我国信息化建设的进程中扮演着至关重要的角色。自2016年起步,2020年开始蓬勃兴起,信创的浪潮正席卷整个信息与通信技…...
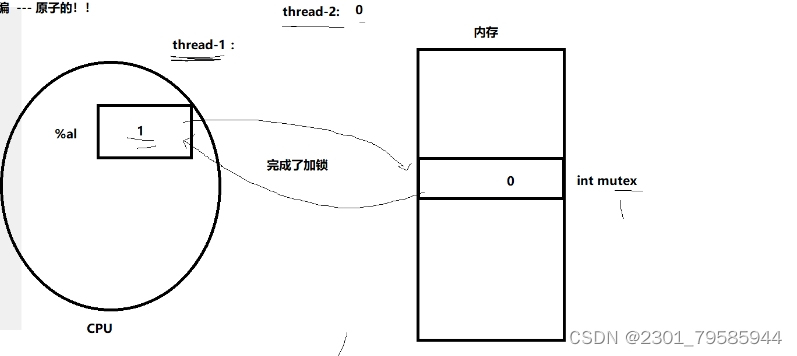
【Linux】线程封装与互斥(万字)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 目录 文章目录 前言 C多线程的用法 对原生线程进行一次封装 理解pthread线程 Linux线程互斥 进程线程间的互斥相关背景概念 互斥量mutex 操作共享变量会有问题的售票…...

5分钟教你部署MySQL8.0环境
此方法基于Windows操作系统! 一、在MySQL官网单击downloads(下载)MySQLhttps://www.mysql.com/cn/ 选择在Windows操作系统下载 二、选择合适的版本 推荐下载第二种,安装时离线安装即可 三、安装MySQL8.0 1、找到MySQL下载完成…...

AArch64内存管理:MAIR_EL3寄存器详解与应用
1. AArch64内存管理基础与MAIR_EL3寄存器定位 在Armv8-A/v9-A架构中,内存管理单元(MMU)通过多级页表实现虚拟地址到物理地址的转换。当处理器执行内存访问时,MMU会遍历页表条目(Translation Table Entry),其中包含两个关键信息:目…...

三十岁想从零转行现实吗?带你分辨真正有前景的好工作
我是29岁那年,完成从转行裸辞副业的职业转型。 如果你把职业生涯看成是从现在开始30岁,到你退休那年,中间这么漫长的30年,那么30岁转行完全来得及…...

ARM PMU性能监控单元原理与实践指南
1. ARM PMU性能监控单元概述性能监控单元(PMU)是现代ARM处理器中用于硬件级性能分析的核心组件。它通过一组可编程的硬件计数器,实现对处理器内部各种关键事件的精确测量。这些事件涵盖了从指令执行、缓存访问到内存子系统行为等处理器活动的…...
重构)
嘈杂工业场景下的自适应VAD与双码本声纹识别鉴权系统:基于端侧轻量化神经网络与向量量化(VQ)重构
在大型化工车间、能源集控中心以及金融极密隔离库房中,离线声纹识别是物理访问控制和身份安全核验的重要生物特征屏障。然而,在环境本底噪声高达80dB以上的恶劣工业场景下,常规的语音活动检测(VAD)会频繁误触ÿ…...

从入门到实践:EEG公开数据集分类与应用场景全解析
1. EEG公开数据集入门指南刚接触脑电信号分析的研究者,常常会被一个问题困扰:"我应该从哪里获取可靠的EEG数据?"作为一个在这个领域摸爬滚打多年的研究者,我完全理解这种困惑。记得我第一次接触EEG研究时,光…...

告别鼠标手!5分钟上手开源鼠标连点器MouseClick,轻松实现自动化点击
告别鼠标手!5分钟上手开源鼠标连点器MouseClick,轻松实现自动化点击 【免费下载链接】MouseClick 🖱️ MouseClick 🖱️ 是一款功能强大的鼠标连点器和管理工具,采用 QT Widget 开发 ,具备跨平台兼容性 。软…...

CANoe诊断测试没CDD文件怎么办?手把手教你用Fault Memory窗口和CAPL脚本读取解析DTC故障码
CANoe诊断测试无CDD文件的实战解决方案:从Fault Memory到CAPL脚本全解析当CDD文件缺失或定义不清晰时,诊断测试工程师常常陷入困境。本文将深入探讨如何利用Fault Memory窗口的基础功能,并通过CAPL脚本实现更灵活、更强大的故障码读取与解析方…...

Graphin高级应用:结合GISDK构建配置化图分析模块的完整指南
Graphin高级应用:结合GISDK构建配置化图分析模块的完整指南 【免费下载链接】Graphin 🌌 A React toolkit for graph visualization based on G6. 项目地址: https://gitcode.com/gh_mirrors/gr/Graphin 在当今数据驱动的时代,图可视化…...

告别多头对接!DMXAPI 为企业打造国产大模型 “统一入口”
一、企业 AI 落地的普遍痛点:被接口和平台消耗的成本在企业数字化转型的浪潮中,AI 大模型已经成为标配,但很多企业在落地时,都会陷入一个共同的困境:为了满足不同业务场景的需求,需要同时对接 DeepSeek、阿…...

3步开启Windows 11安卓应用新体验:WSA完整使用指南
3步开启Windows 11安卓应用新体验:WSA完整使用指南 【免费下载链接】WSA Developer-related issues and feature requests for Windows Subsystem for Android 项目地址: https://gitcode.com/gh_mirrors/ws/WSA Windows Subsystem for Android(简…...