相机参数与图像处理技术解析
01. 相机内参和外参的含义?如果将图像放大两倍,内外参如何变化?
-
相机有两个最基础的数据:内参(Instrinsics)和外参(Extrinsics),内参主要描述的是相机的CCD/CMOS感光片尺寸/分辨率以及光学镜头的系数,外参主要描述的是相机在世界坐标系下的摆放位置和朝向角度。
-
参考:https://zhuanlan.zhihu.com/p/646310465
-
相机的内参和外参是用于描述相机如何捕捉三维世界并将其投影到二维图像平面上的参数。
-
内参(Intrinsic Parameters):
-
内参是相机自身的属性,与场景无关。它包括焦距(focal length)、主点(principal point,图像中心的坐标)、畸变系数(distortion coefficients,描述镜头畸变如径向和切向畸变)等。
-
焦距和图像传感器的尺寸共同决定了视场角(Field of View, FOV)。
-
主点通常接近图像中心。
-
内参矩阵一般形式为:
[
K = [ f x 0 c x 0 f y c y 0 0 1 ] K = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} K= fx000fy0cxcy1
]
其中 KaTeX parse error: Can't use function '\(' in math mode at position 1: \̲(̲f_x, f_y) 是焦距在图像平面上的x轴和y轴的比例,( c x , c y c_x, c_y cx,cy) 是主点的坐标。
-
-
外参(Extrinsic Parameters):
-
外参描述的是相机相对于世界坐标系的位置和方向。它由旋转矩阵(Rotation matrix)和平移向量(Translation vector)组成,这些参数定义了从世界坐标系到相机坐标系的转换。
-
外参矩阵通常表示为:
KaTeX parse error: Undefined control sequence: \[ at position 2: \̲[̲ \begin{bmatrix…
其中 ( R R R) 是一个3x3的旋转矩阵,( t t t) 是一个3x1的平移向量。
-
如果将图像放大两倍,内外参的变化如下:
-
内参变化:
-
焦距 ( f x , f y f_x, f_y fx,fy) 通常不会改变,因为它是基于相机的物理属性。但是,图像坐标系的比例变化了,因此主点 KaTeX parse error: Can't use function '\(' in math mode at position 1: \̲(̲c_x, c_y) 需要调整以反映新的图像中心。如果原图中 KaTeX parse error: Can't use function '\(' in math mode at position 1: \̲(̲c_x, c_y) 是原点,放大后它们将变为原来的两倍。
-
新的内参矩阵将是:
[
K ′ = [ f x 0 2 c x 0 f y 2 c y 0 0 1 ] K' = \begin{bmatrix} f_x & 0 & 2c_x \\ 0 & f_y & 2c_y \\ 0 & 0 & 1 \end{bmatrix} K′= fx000fy02cx2cy1
]
-
-
外参变化:
- 外参(旋转矩阵和平移向量)不会因为图像尺寸的改变而改变,因为它们描述的是相机与世界坐标系之间的物理关系,与图像的尺寸无关。
LSS(Lift, Splat, Shoot)
https://github.com/nv-tlabs/lift-splat-shoot
是一个用于三维环境感知和环境表示的视觉感知系统,主要应用于自动驾驶领域。这个方法是一种用于从二维图像直接构建三维环境表示的深度学习算法。它主要通过以下三个步骤来实现:
-
Lift(提升):
- 这一步涉及到将二维像素“提升”到三维空间中。算法使用从图像中提取的深度信息将每个像素点映射到一个三维点上。这种映射通常依赖于相机的内参和外参,通过这些参数,可以将二维图像坐标转换为三维世界坐标。
-
Splat(喷洒):
- 在“喷洒”步骤中,所提升的三维点被映射到一个离散的三维空间(通常是体素网格)中。这一步是一种数据结构转换,它把连续的三维点云转换为离散的体素表示,这种表示更适合用于随后的处理步骤如卷积神经网络。
-
Shoot(射击):
- 最后一步是“射击”,这里利用三维卷积神经网络处理提升和喷洒后的数据,从而提取用于任务的特征。例如,自动驾驶车辆可能需要识别和分类不同的道路用户(如行人、车辆)、道路标记和其他关键的环境特征。
LSS方法的一个主要优势是它能够直接从图像数据中构建出三维场景的表示,这有助于自动驾驶系统更好地理解和导航其周围的环境。此外,它通过利用卷积神经网络,可以在保持高度准确性的同时实现高效的处理速度。这种方法在自动驾驶技术中具有重要的应用前景,尤其是在需要精确和实时的三维环境感知和决策支持的情况下。
-
02. 坐标系的变换
-
BEV训练数据集的世界坐标系, 比如nuScenes地图,它的世界坐标系是图片坐标系,原点在图片左下角,单位是米。数据集中会根据时间序列给出车辆的瞬时位置,也就是在这个图片上的XY。
-
BEV里,这个Ego是特指车辆本身,它是用来描述摄像机/激光雷达(Lidar,light detection and ranging)/毫米波雷达(一般代码里就简称为Radar)/IMU在车身上的安装位置(单位默认都是米)和朝向角度,坐标原点一般是车身中间,外参(Extrinsics Matrix)主要就是描述这个坐标系的。
-
相机坐标系,坐标原点在CCD/CMOS感光片的中央,单位是像素,内参(Intrinsics Matrix)主要就是描述这个坐标系的。
-
照片坐标系,坐标原点在图片的左上角,单位是像素,横纵坐标轴一般不写成XY,而是uv。
-
照片中的像素位置转换到世界坐标系时,要经历:Image_to_Camera, Camera_to_Ego, Ego_to_World;Camera_to_Image通常就是Intrinsics参数矩阵,Ego_to_Camera就是Extrinsics参数矩阵。
03. 放射变换与逆投影变换分别是什么
-
仿射变换: 仿射变换是一种线性变换,保持了直线的平行性和比例关系。它可以用于将一个二维平面上的点映射到另一个二维平面上。仿射变换可以通过一个矩阵乘法和一个平移向量来表示。它包括平移、旋转、缩放和剪切等操作。在计算机视觉领域,仿射变换常用于图像的平移、旋转、缩放和仿射校正等操作。
-
逆投影变换: 逆投影变换是指通过相机内参和外参,将图像上的点投影到三维空间中的过程。它是相机成像过程的逆过程。逆投影变换可以用于将图像上的点转换为三维空间中的点坐标。逆投影变换的计算需要相机的内参矩阵、外参矩阵和图像上的点坐标。在计算机视觉和计算机图形学中,逆投影变换常用于三维重建、相机姿态估计和虚拟现实等应用。
import numpy as np
import cv2# 定义相机内参矩阵 K
K = np.array([[1000, 0, 500], [0, 1000, 300], [0, 0, 1]], dtype=np.float32)# 定义相机外参的旋转矩阵 R(在此为单位矩阵)
R = np.array([[1, 0, 0], [0, 1, 0], [0, 0, 1]], dtype=np.float32)# 定义相机外参的平移向量 T
T = np.array([1, 2, 3], dtype=np.float32)# 定义图像上的点坐标 uv(二维点)
uv = np.array([[200, 300], [400, 500]], dtype=np.float32)# 计算 Rc2w * K 的逆矩阵
Rc2w_invK = np.linalg.inv(np.dot(R, K))# 将 uv 点扩展成齐次坐标,并进行逆投影变换
H = np.dot(Rc2w_invK, np.append(uv, np.ones((uv.shape[0], 1)), axis=1).T)# 计算世界坐标 Pxyz(假设深度为 T[2])
Pxyz = H * (T[2] / H[2]) - T[:2]# 定义仿射变换矩阵 M
M = np.array([[1, 0, 100], [0, 1, 50]], dtype=np.float32)# 加载图像(假设 image 是事先加载的图像)
# image = cv2.imread('path_to_your_image.jpg') # 替换为实际图像路径# 进行仿射变换
# output = cv2.warpAffine(image, M, (image.shape[1], image.shape[0])) # 假设 image 是加载的图像# 将每一步结果打印出来以进行验证(可选)
print("相机内参矩阵 K:\n", K)
print("旋转矩阵 R:\n", R)
print("平移向量 T:\n", T)
print("图像点坐标 uv:\n", uv)
print("逆 Rc2w * K:\n", Rc2w_invK)
print("齐次坐标 H:\n", H)
print("世界坐标 Pxyz:\n", Pxyz)
print("仿射变换矩阵 M:\n", M)相关文章:

相机参数与图像处理技术解析
01. 相机内参和外参的含义?如果将图像放大两倍,内外参如何变化? 相机有两个最基础的数据:内参(Instrinsics)和外参(Extrinsics),内参主要描述的是相机的CCD/CMOS感光片尺寸/分辨率以及光学镜头的系数,外参主…...
Ubuntu20.04安装Prometheus监控系统
环境准备: 服务器名称内网IP公网IPPrometheus服务器192.168.0.23047.119.21.167Grafana服务器192.168.0.23147.119.22.8被监控服务器192.168.0.23247.119.22.82 更改主机名方便辨认 hostnamectl set-hostname prometheus hostnamectl set-hostname grafana hostn…...

kafka consumer客户端消费逻辑解析
kafka consumer客户端消费逻辑解析 一、主要步骤二、提交策略【步骤2代码解析】【提交策略总结】 三、拉取策略四、消费策略【代码解析】【消费策略总结】 一、主要步骤 这是kafka客户端拉取消息的入口,有4个主要部分 1、启动后的准备 consumer线程启动后ÿ…...

打印机出现多个副本无法删除
打印机出现多个副本很烦人,尤其是在打印机在局域网内被多个主机共享的时候,一旦出现新的副本,原有副本全都变成脱机状态,其他电脑连接的共享打印机是原来的副本,所以要重新设置打印机共享,很烦人。 想要删…...

FlinkSQL 开发经验分享
作者:汤包 最近做了几个实时数据开发需求,也不可避免地在使用 Flink 的过程中遇到了一些问题,比如数据倾斜导致的反压、interval join、开窗导致的水位线失效等问题,通过思考并解决这些问题,加深了我对 Flink 原理与机…...
JVM原理(十二):JVM虚拟机类加载过程
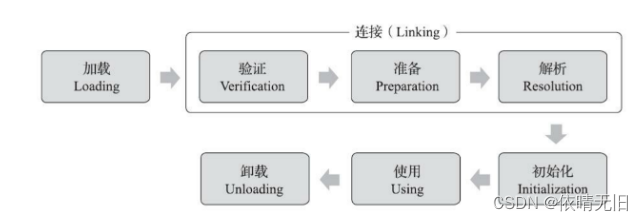
一个类型从被加载到虚拟机内存中开始,到卸载为止,它的整个生命周期将会经过 加载、验证、准备、解析、初始化、使用、卸载七个阶段。其中 验证、准备、解析三个部分统称为 连接 1. 加载 加载是整个类加载的一个过程。在加载阶段,Java虚拟机…...
)
Apipost接口测试工具的原理及应用详解(三)
本系列文章简介: 随着软件行业的快速发展,API(应用程序编程接口)作为不同软件组件之间通信的桥梁,其重要性日益凸显。API的质量直接关系到软件系统的稳定性、性能和用户体验。因此,对API进行严格的测试成为软件开发过程中不可或缺的一环。在众多API测试工具中,Apipost凭…...

unity里鼠标位置是否在物体上。
1. 使用Raycast 如果你的图片是在UI Canvas上,可以使用Raycast来检测鼠标点击是否在图片上。 using UnityEngine; using UnityEngine.EventSystems; using UnityEngine.UI; public class ImageClickChecker : MonoBehaviour { public Image targetImage; voi…...

Java知识点大纲
文章目录 第一阶段:JavaSE1、面向对象编程(基础)1)面向过程和面向对象区别2)类和对象的概述3)类的属性和方法4)创建对象内存分析5)构造方法(Construtor)及其重载6)对象类型的参数传递7)this关键字详解8)static关键字详解9)局部代码块、构造代码块和静态代码块10)pac…...
【Kafka】记录一次Kafka消费者重复消费问题
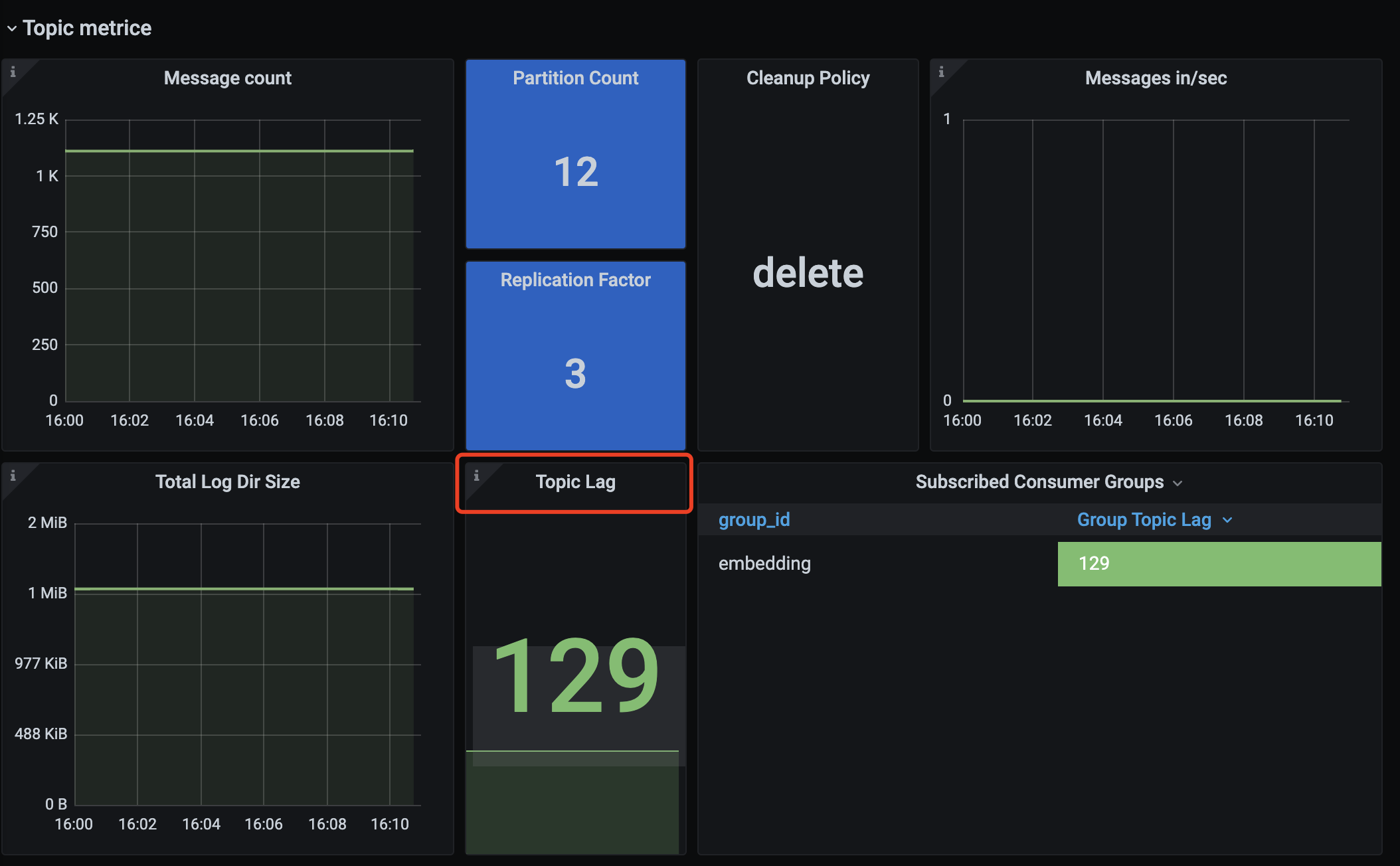
文章目录 现象业务背景排查过程Push与Pull 现象 用户反馈消费者出现消息积压,并且通过日志看,一直重复消费,且没有报错日志。 业务背景 用户的消费者是一个将文件做Embedding的任务,(由于AI技术的兴起,大…...
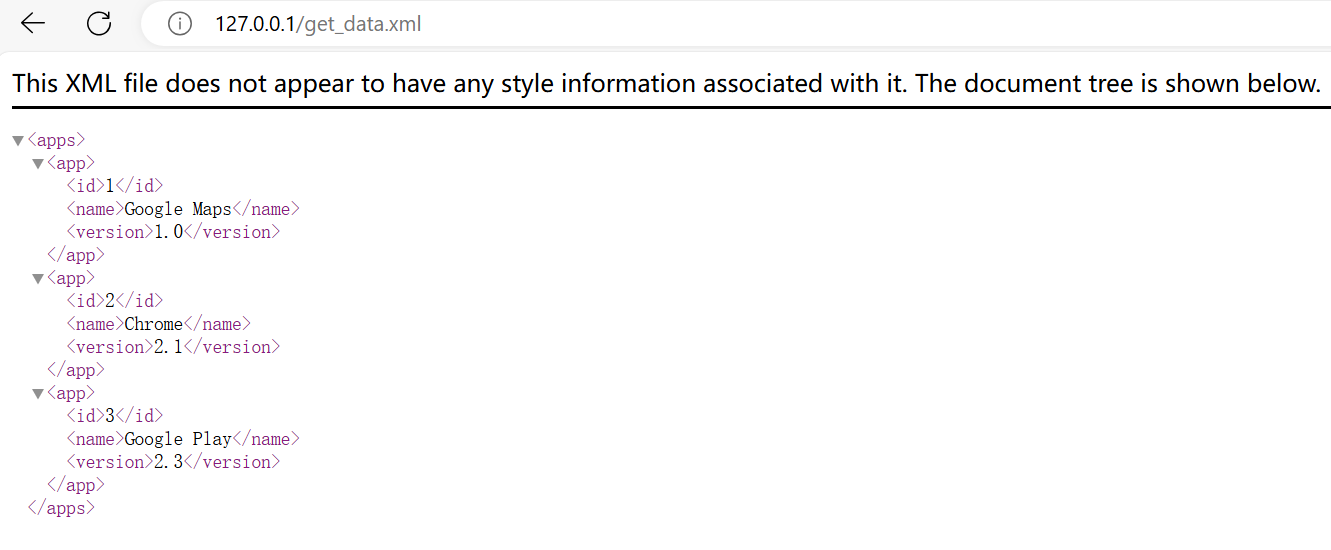
Android使用http加载自建服务器静态网页
最终效果如下图,成功加载了电脑端的静态网页内容,这是一个xml文件。 电脑端搭建http服务器 使用“Apache Http Server”,下载地址是:https://httpd.apache.org/download.cgi。 安装启动步骤,参考:Apach…...

python解耦重构,提高程序维护性
一、重构思想 思路来源 java spring设计模式学习,强调低耦合的思想,通过解耦来提高程序的可维护性。 二、代码重构 解决方案 通过单独配置文件来控制变量的改变。 spring的话可以读取xml或者是springboot 读取application.properties 来获取变量值。…...

深入解析 Laravel 事件系统:架构、实现与应用
Laravel 的事件系统是框架中一个强大且灵活的功能,它允许开发者在应用程序中定义和使用自定义事件和监听器。这个系统基于观察者模式,使得代码解耦和可维护性大大提高。在本文中,我们将深入探讨 Laravel 事件系统的工作原理、如何实现自定义事…...

视频怎么制作gif动态图片?GIF制作方法分享
视频怎么制作gif动态图片?视频制作GIF动态图片,不仅保留了视频的生动瞬间,还赋予了图像循环播放的魔力。这一技能不仅让创意表达更加丰富多彩,还极大地提升了视觉传播的效率和趣味性。在快节奏的数字时代,GIF动图以其小…...
js 使用 lodash-es 检测某个值是否是函数
import { isFunction } from lodash-eslet isA isFunction(() > {}) console.log(isA) //true https://www.lodashjs.com/docs/lodash.isFunction#_isfunctionvalue https://lodash.com/docs/4.17.15#isFunction 人工智能学习网站 https://chat.xutongbao.top...

[go-zero] goctl 生成api和rpc
文章目录 1.goctl 概述2.go-zero 需要安装的组件3.生成 api4.生成 rpc 1.goctl 概述 goctl支持多种rpc,较为流行的是google开源的grpc,这里主要介绍goctl rpc protoc的代码生成与使用。protoc是grpc的命令,作用是将proto buffer文件转化为相…...
docker -run hello-world超时
主要原因就是尝试拉取库的时候没有从阿里云镜像里拉,所以设置一下就好了 这里使用的是ubuntu系统(命令行下逐行敲就行了) sudo mkdir -p /etc/docker sudo tee /etc/docker/daemon.json <<-EOF {"registry-mirrors": [&quo…...
黎曼度量曲面与高斯曲率)
拓扑学习系列(8)黎曼度量曲面与高斯曲率
黎曼度量 黎曼度量是黎曼几何中的一个重要概念,它用来描述流形上的切向量之间的长度和角度。黎曼度量赋予了流形一个内积结构,使得我们可以定义切向量的长度、夹角和内积,从而引入了度量空间的概念。让我更详细地解释一下黎曼度量࿱…...
:i.MX linux BSP)
汽车IVI中控开发入门及进阶(三十四):i.MX linux BSP
开发板: 汽车IVI中控开发入门及进阶(三十三):i.MX linux开发之开发板-CSDN博客 linux 开发项目: 汽车IVI中控开发入门及进阶(三十二):i.MX linux开发之Yocto-CSDN博客 前言: 有了开发板,linux BSP编译项目yocto,接下来就可以在i.MX平台上构建和安装i.MX Linux …...

【Python机器学习】算法链与管道——构建管道
目录 1、首先,我们构建一个由步骤列表组成的管道对象。 2、向任何其他scikit-learn估计器一样来拟合这个管道 3、调用pipe.score 我们来看下如何使用Pipeline类来表示在使用MinMaxScaler缩放数据后,再训练一个SVM的工作流程(暂时不用网格搜…...

64_《智能体微服务架构企业级实战教程》授权与认证之授权认证集成测试
前言 配套视频教程: 在 Bilibili课堂、CSDN课程、51CTO学堂 同步发售,提供:源码+部署脚本+文档。 bilibili课堂视频教程:智能体微服务架构企业级实战教程_哔哩哔哩_bilibili CSDN课程视频教程:智能体微服务架构企业级实战教程_在线视频教程-CSDN程序员研修院 51CTO学堂…...

2026在线测评系统十大量表对比:信效度与场景全解析
【30s 核心摘要】2026 年在线测评成人才管理刚需,信效度与场景适配成选型核心。本文聚焦十大量表,从信度、效度、适配场景等维度深度对比,重点解析问卷星、北森、金数据等主流平台的量表能力与落地效果,为企业、高校及机构提供科学…...

别再死记硬背SMO公式了!用Python手写一个SVM分类器,带你一步步拆解SMO核心逻辑
用Python手写SVM分类器:代码驱动理解SMO算法核心在机器学习领域,支持向量机(SVM)以其优秀的分类性能和坚实的数学基础著称。然而,许多学习者在理解其核心算法——序列最小优化(SMO)时,往往被复杂的数学推导所困扰。本文将采用一种…...

CANN-昇腾NPU-RAG推理-检索增强生成怎么部署
RAG(Retrieval-Augmented Generation)是 LLM 知识库的组合:先检索相关文档,再让 LLM 基于文档回答。昇腾NPU 上部署 RAG 需要两个组件:Embedding 模型(做向量检索)和 LLM(做生成&am…...

SSH工具对比:新手用户和熟练运维,选型逻辑有什么不同
结论 新手用户和熟练运维在选择 SSH 工具时,关注点往往完全不同。 新手更在意的是:能不能顺利连接、界面是否直观、文件和配置是否容易找到、网站出问题时能不能快速定位。 而熟练运维更在意的是:连接效率、命令自由度、多服务器管理能力、原…...

厨房空调技术白皮书:从风冷到水冷,制冷系统在厨房场景中的工程化演进
厨房空调是暖通行业近三年技术迭代最密集的细分品类。从最初的"凉霸"(本质是风扇),到风冷分体式,再到水冷一体式,每代技术都在解决上一代没有覆盖的用户痛点。本文以工程技术视角,梳理四代厨房制…...

LizzieYzy:你的智能围棋教练,让AI分析变得简单有趣 [特殊字符]
LizzieYzy:你的智能围棋教练,让AI分析变得简单有趣 🎯 【免费下载链接】lizzieyzy LizzieYzy - GUI for Game of Go 项目地址: https://gitcode.com/gh_mirrors/li/lizzieyzy 还在为复盘找不到关键点而烦恼吗?想提升棋力却…...

机器学习驱动储氢材料发现:从特征工程到DFT/MD验证的完整指南
1. 项目概述与核心思路氢能被视为未来清洁能源体系的关键一环,但如何安全、高效、经济地储存氢气,一直是制约其大规模应用的瓶颈。在众多储氢技术路线中,固态储氢,特别是基于金属氢化物的储氢材料,因其高体积储氢密度和…...

BiliRoamingX:彻底解决B站体验限制的完整增强方案
BiliRoamingX:彻底解决B站体验限制的完整增强方案 【免费下载链接】BiliRoamingX-integrations BiliRoamingX integrations and patches powered by ReVanced. 项目地址: https://gitcode.com/gh_mirrors/bi/BiliRoamingX-integrations 你是否曾为B站的内容区…...

Elden Ring帧率解锁终极指南:从60帧到144+的完整教程
Elden Ring帧率解锁终极指南:从60帧到144的完整教程 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_mirrors/el/Elden…...