3.用户程序与驱动交互
驱动程序请使用第二章https://blog.csdn.net/chenhequanlalala/article/details/140034424
用户app与驱动交互最常见的做法是insmod驱动后,生成一个设备节点,app通过open,read等系统调用去操作这个设备节点,这里先用mknode命令调试。
mknod 设备名 设备类型(b块设备/c字符设备/p管道) 主设备号 次设备号
mknod /dev/hello c 240 0
使用mknode后生成了/dev/hello节点,写入数据到hello节点中,查看dmesg的输出发现调用了驱动的open write release
echo 1 > /dev/hello
[ 802.771723] /home/book/nfs_rootfs/drivers_projects/01_hello_drv/hello_drv.c hello_open 48
[ 802.773196] /home/book/nfs_rootfs/drivers_projects/01_hello_drv/hello_drv.c hello_write 40
[ 802.773285] /home/book/nfs_rootfs/drivers_projects/01_hello_drv/hello_drv.c hello_release 56
这里写一个C程序来读写这个设备节点
#include "linux/string.h"
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>/*
读数据 ./hello_test xxx(设备节点名字)
写数据 ./hello_test xxx(设备节点名字) string
*/int main(int argc, char **argv)
{int fd;int len;char buf[1024];if(argc < 2){printf("Usage :\n");printf("%s <dev> [str]\n", argv[0]);return -1;}//openfd = open(argv[1], O_RDWR);if(fd < 0){printf("open %s failed\n", argv[1]);return -1;}//readif(argc == 2){len = read(fd, buf, sizeof(buf));printf("%s\n", buf);}//writeelse if(argc == 3){len = write(fd, argv[2], strlen(argv[2]));}else{printf("Too many parameters\n");}close(fd);
}分别调用 ./hello_test /dev/hello 123 和 ./hello_test /dev/hello 后,查看dmesg输出显示
[ 2770.434595] /home/book/nfs_rootfs/drivers_projects/01_hello_drv/hello_drv.c hello_open 48
[ 2770.434664] /home/book/nfs_rootfs/drivers_projects/01_hello_drv/hello_drv.c hello_write 40
[ 2770.434705] /home/book/nfs_rootfs/drivers_projects/01_hello_drv/hello_drv.c hello_release 56
[ 2772.388372] /home/book/nfs_rootfs/drivers_projects/01_hello_drv/hello_drv.c hello_open 48
[ 2772.388439] /home/book/nfs_rootfs/drivers_projects/01_hello_drv/hello_drv.c hello_read 32
[ 2772.389257] /home/book/nfs_rootfs/drivers_projects/01_hello_drv/hello_drv.c hello_release 56
app的open write read release都一一对应上了。
这里的./hello_test /dev/hello其实没有读到数据,因为驱动程序中并没有和app交互数据。
[root@100ask:/mnt/drivers_projects/01_hello_drv]# ./hello_test /dev/hello
read size = 1024 data =
app与驱动交换数据通过copy_from_user和copy_to_user来实现
copy_to_user(void __user *to, const void *from, unsigned long n);
copy_from_user(void *to, const void __user *from, unsigned long n);在驱动程序中添加一个buf用来保存用户的数据,用copy_from_user保存数据,用copy_to_user读取数据。
#include "asm/uaccess.h"
#include "linux/scatterlist.h"
#include "linux/types.h"
#include <linux/mm.h>
#include <linux/miscdevice.h>
#include <linux/slab.h>
#include <linux/vmalloc.h>
#include <linux/mman.h>
#include <linux/random.h>
#include <linux/init.h>
#include <linux/raw.h>
#include <linux/tty.h>
#include <linux/capability.h>
#include <linux/ptrace.h>
#include <linux/device.h>
#include <linux/highmem.h>
#include <linux/backing-dev.h>
#include <linux/shmem_fs.h>
#include <linux/splice.h>
#include <linux/pfn.h>
#include <linux/export.h>
#include <linux/io.h>
#include <linux/uio.h>
#include <linux/module.h>#include <linux/uaccess.h>#define DEVICE_NAME "hello_device"
static int major;
#define hello_buf_size 100
static unsigned char hello_buf[hello_buf_size];//ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
//参数含义依次为 要读取的文件指针 用户保存数据的buf 读取数据大小 文件内容的偏移量
static ssize_t hello_read (struct file * filp, char __user *buf, size_t size, loff_t *offset)
{unsigned long len = size > hello_buf_size ? hello_buf_size : size;copy_to_user(buf, hello_buf, len);printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);return len;
}//ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
//参数含义依次为 要写入的文件指针 用户要写入的数据buf 写入数据大小 文件内容的偏移量
static ssize_t hello_write (struct file *filp, const char __user *buf, size_t size, loff_t *offset)
{unsigned long len = size > hello_buf_size ? hello_buf_size : size;copy_from_user(hello_buf, buf, len);printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);return len;
}//int (*open) (struct inode *, struct file *);
//参数含义依次为 文件索引节点 文件指针
static int hello_open (struct inode *node, struct file *filp)
{printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);return 0;
}//int (*release) (struct inode *, struct file *);
//参数含义依次为 文件索引节点 文件指针
static int hello_release (struct inode *node, struct file *filp)
{printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);return 0;
}/*构建file_operations结构体*/
static const struct file_operations hello_fops = {.owner = THIS_MODULE,.read = hello_read,.write = hello_write,.open = hello_open,.release = hello_release,
};/*init函数,实现register_chrdev*/
static int __init hello_init(void)
{//数含义依次为 主设备号,如果为0,内核会自动分配一个可用的。设备名,会在/proc/devices中显示。 file_operations结构体//注册成功就返回主设备号major = register_chrdev(0, DEVICE_NAME, &hello_fops);printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);return 0;
}/*exit函数unregister_chrdev*/
static void __exit hello_exit(void)
{//数含义依次为 主设备号 设备名unregister_chrdev(major, DEVICE_NAME);printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
}module_init(hello_init);
module_exit(hello_exit);
//遵循GPL协议
MODULE_LICENSE("GPL");重新insmod驱动后,执行测试程序
[root@100ask:/mnt/drivers_projects/01_hello_drv]# ./hello_test /dev/hello 123456
[root@100ask:/mnt/drivers_projects/01_hello_drv]# ./hello_test /dev/hello
read size = 100 data = 123456
[root@100ask:/mnt/drivers_projects/01_hello_drv]# ./hello_test /dev/hello hello
[root@100ask:/mnt/drivers_projects/01_hello_drv]# ./hello_test /dev/hello
read size = 100 data = hello6
这里第二次输出hello6,是因为copy_from_user只是写入指定长度的数据,第一次写入的123456只覆盖了前5字节。
相关文章:

3.用户程序与驱动交互
驱动程序请使用第二章https://blog.csdn.net/chenhequanlalala/article/details/140034424 用户app与驱动交互最常见的做法是insmod驱动后,生成一个设备节点,app通过open,read等系统调用去操作这个设备节点,这里先用mknode命令调…...
尽量不写一行if...elseif...写出高质量可持续迭代的项目代码
背景 无论是前端代码还是后端代码,都存在着定位困难,不好抽离,改造困难的问题,造成代码开发越来越慢,此外因为代码耦合较高,总是出现改了一处地方,然后影响其他地方,要么就是要修改…...

xcrun: error: unable to find utility “simctl“, not a developer tool or in PATH
目录 前言 一、问题详情 二、解决方案 1.确认Xcode已安装 2.安装Xcode命令行工具 3.指定正确的开发者目录 4. 确认命令行工具路径 5. 更新PATH环境变量 前言 今天使用cocoapods更新私有库的时候,遇到了"xcrun: error: unable to find utility &…...

【linux高级IO(一)】理解五种IO模型
💓博主CSDN主页:杭电码农-NEO💓 ⏩专栏分类:Linux从入门到精通⏪ 🚚代码仓库:NEO的学习日记🚚 🌹关注我🫵带你学更多操作系统知识 🔝🔝 Linux高级IO 1. 前言2. 重谈对…...

前端引用vue/element/echarts资源等引用方法Blob下载HTML
前端引用下载vue/element/echarts资源等引用方法 功能需求 需求是在HTML页面中集成Vue.js、Element Plus(Element UI的Vue 3版本)、ECharts等前端资源,使用Blob下载HTML。 解决方案概述 直接访问线上CDN地址:简单直接,…...

昇思MindSpore学习笔记2-01 LLM原理和实践 --基于 MindSpore 实现 BERT 对话情绪识别
摘要: 通过识别BERT对话情绪状态的实例,展现在昇思MindSpore AI框架中大语言模型的原理和实际使用方法、步骤。 一、环境配置 %%capture captured_output # 实验环境已经预装了mindspore2.2.14,如需更换mindspore版本,可更改下…...

uniapp实现图片懒加载 封装组件
想要的效果就是窗口滑动到哪里,哪里的图片进行展示 主要原理使用IntersectionObserver <template><view><image error"HandlerError" :style"imgStyle" :src"imageSrc" :id"randomId" :mode"mode&quo…...

持续交付:自动化测试与发布流程的变革
目录 前言1. 持续交付的概念1.1 持续交付的定义1.2 持续交付的核心原则 2. 持续交付的优势2.1 提高交付速度2.2 提高软件质量2.3 降低发布风险2.4 提高团队协作 3. 实施持续交付的步骤3.1 构建自动化测试体系3.1.1 单元测试3.1.2 集成测试3.1.3 功能测试3.1.4 性能测试 3.2 构建…...

VBA常用的字符串内置函数
前言 在VBA程序中,常用的内置函数可以按照功能分为字符串函数、数字函数、转换函数等等,本节主要会介绍常用的字符串的内置函数,包括Len()、Left()、Mid()、Right()、Split()、String()、StrConV()等。 本节的练习数据表以下表为例ÿ…...
)
大数据面试题之Spark(7)
目录 Spark实现wordcount Spark Streaming怎么实现数据持久化保存? Spark SQL读取文件,内存不够使用,如何处理? Spark的lazy体现在哪里? Spark中的并行度等于什么 Spark运行时并行度的设署 Spark SQL的数据倾斜 Spark的exactly-once Spark的…...
AI绘画 Stable Diffusion图像的脸部细节控制——采样器全解析
大家好,我是画画的小强 我们在运用AI绘画 Stable Diffusion 这一功能强大的AI绘图工具时,我们往往会发现自己对提示词的使用还不够充分。在这种情形下,我们应当如何调整自己的策略,以便更加精确、全面地塑造出理想的人物形象呢&a…...

liunx离线安装Firefox
在Linux系统中离线安装Firefox浏览器,您需要先从Mozilla的官方网站下载Firefox的安装包,然后通过终端进行安装。以下是详细的步骤: 准备工作 下载Firefox安装包: 首先,在一台可以上网的电脑上访问Firefox官方下载页面…...
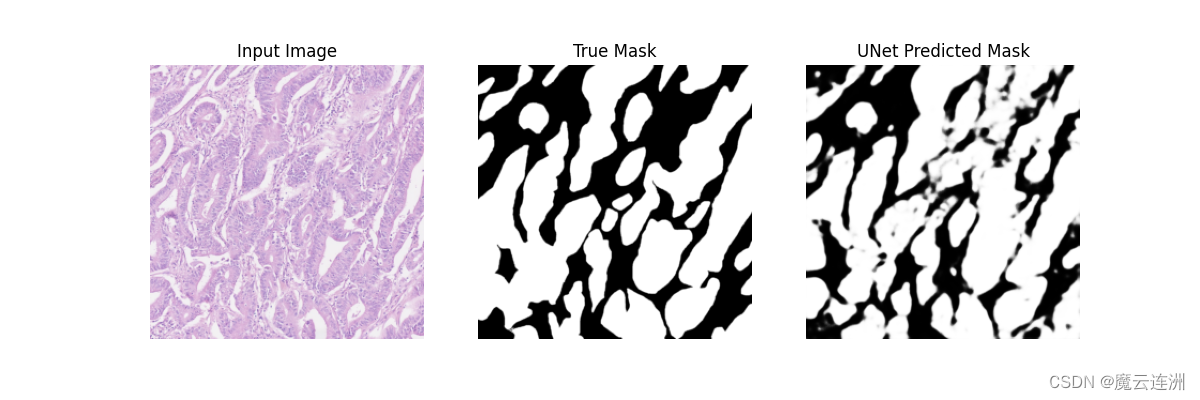
UNet进行病理图像分割
数据集链接:https://pan.baidu.com/s/1IBe_P0AyHgZC39NqzOxZhA?pwdnztc 提取码:nztc UNet模型 import torch import torch.nn as nnclass conv_block(nn.Module):def __init__(self, ch_in, ch_out):super(conv_block, self).__init__()self.conv nn…...

初二数学基础差从哪开始补?附深度解析!
有时候,当你推不开一扇门的时候,不要着急,试着反方向拉一下,或者横向拉一下。下面是小偏整理的初二数学基础差从哪开始补2021年,感谢您的每一次阅读。 初二数学基础差从哪开始补2021年 第一个问题是很多同学都…...

【C语言】return 关键字
在C语言中,return是一个关键字,用于从函数中返回值或者结束函数的执行。它是函数的重要组成部分,负责将函数的计算结果返回给调用者,并可以提前终止函数的执行。 主要用途和原理: 返回值给调用者: 当函数执…...

华为机试HJ13句子逆序
华为机试HJ13句子逆序 题目: 将一个英文语句以单词为单位逆序排放。例如“I am a boy”,逆序排放后为“boy a am I”所有单词之间用一个空格隔开,语句中除了英文字母外,不再包含其他字符 想法: 将输入的字符串通过…...
)
代码随想录day40 动态规划(5)
52. 携带研究材料(第七期模拟笔试) (kamacoder.com) 完全背包,可重复放入物品,需要用一维滚动数组从前往后遍历。 由于第0个物品和后面物品的转移方程没有区别,可以不额外初始化dp数组,直接用元素全0的d…...

FFmpeg 命令行 音视频格式转换
📚:FFmpeg 提供了丰富的命令行选项和功能,可以用来处理音视频文件、流媒体等,掌握命令行的使用,可以有效提高工作效率。 目录 一、视频转换和格式转换 🔵 将视频文件转换为另一种格式 🔵 指定…...

Jmeter使用JSON Extractor提取多个变量
1.当正则不好使时,用json extractor 2.提取多个值时,默认值必填,否则读不到变量...
c++ 设计模式 的课本范例(下)
(19) 桥接模式 Bridge,不是采用类继承,而是采用类组合,一个类的数据成员是类对象,来扩展类的功能。源码如下: class OS // 操作系统负责绘图 { public:virtual ~OS() {}virtual void draw(cha…...

5分钟实现Windows三指拖拽:macOS手势体验的终极解决方案
5分钟实现Windows三指拖拽:macOS手势体验的终极解决方案 【免费下载链接】ThreeFingersDragOnWindows Enables macOS-style three-finger dragging functionality on Windows Precision touchpads. 项目地址: https://gitcode.com/gh_mirrors/th/ThreeFingersDrag…...

3大止损策略拯救你的交易:backtrader实战指南
3大止损策略拯救你的交易:backtrader实战指南 【免费下载链接】backtrader Python Backtesting library for trading strategies 项目地址: https://gitcode.com/gh_mirrors/ba/backtrader 作为一名量化交易者,你是否经常面临这样的困境ÿ…...

深入掌握Android响应式编程:RxJava与Kotlin Coroutines+Flow实战指南
目录 响应式编程范式解析 RxJava核心架构剖析 操作符系统深度应用 多线程调度实战策略 Kotlin协程基础重构 Flow异步流处理机制 StateFlow与SharedFlow应用场景 响应式测试方法论 复杂状态管理实战 性能优化与异常处理 技术选型对比指南 面试题库精粹 第一章 响应式编程范式解析…...

【Gemini商业价值护城河构建指南】:用4维动态估值法锁定长期LTV,错过Q3将丧失成本优化黄金窗口
更多请点击: https://kaifayun.com 第一章:Gemini生命周期价值分析 Gemini模型的生命周期价值(LTV)不仅体现在其推理性能与多模态能力上,更贯穿于部署、迭代、监控与成本优化的全链路环节。相较于传统大模型ÿ…...

网络性能周报 - {日期范围}
网络性能周报 - {日期范围} 【免费下载链接】iperf3-win-builds iperf3 binaries for Windows. Benchmark your network limits. 项目地址: https://gitcode.com/gh_mirrors/ip/iperf3-win-builds 执行摘要 平均带宽:{bandwidth} Mbps ({变化率}%)最大延迟&…...

免费开源播放器MPC-BE:打造你的终极媒体播放解决方案
免费开源播放器MPC-BE:打造你的终极媒体播放解决方案 【免费下载链接】MPC-BE MPC-BE – универсальный проигрыватель аудио и видеофайлов для операционной системы Windows. 项目地址: htt…...

深度解析miniblink49浏览器内核架构设计与企业级打印功能实现原理
深度解析miniblink49浏览器内核架构设计与企业级打印功能实现原理 【免费下载链接】miniblink49 a lighter, faster browser kernel of blink to integrate HTML UI in your app. 一个小巧、轻量的浏览器内核,用来取代wke和libcef 项目地址: https://gitcode.com/…...
:如何用3步完成eIDAS 2.0兼容性认证与审计留痕闭环)
Gemini KYC合规沙盒实战(仅限首批200家持牌机构开放):如何用3步完成eIDAS 2.0兼容性认证与审计留痕闭环
更多请点击: https://intelliparadigm.com 第一章:Gemini KYC流程优化 Gemini 交易所的 KYC(Know Your Customer)流程长期以来以严谨著称,但用户反馈表明,传统表单提交人工审核模式存在平均 3.2 天的等待延…...

AWVS深度调优指南:从安装卡死到WAF绕过实战
1. 这不是“点几下就完事”的玩具,而是渗透测试中真正扛压的扫描引擎很多人第一次听说AWVS(Acunetix Web Vulnerability Scanner),是在某篇标题写着“三分钟上手”“一键扫出100个漏洞”的公众号推文里。结果装完发现:…...

tracetcp:5个关键场景下比传统traceroute更有效的TCP路由追踪工具
tracetcp:5个关键场景下比传统traceroute更有效的TCP路由追踪工具 【免费下载链接】tracetcp tracetcp. Traceroute utility that uses tcp syn packets to trace network routes. 项目地址: https://gitcode.com/gh_mirrors/tr/tracetcp tracetcp是一款基于…...