【代码随想录——图论——岛屿问题】
1.岛屿数量
https://kamacoder.com/problempage.php?pid=1171
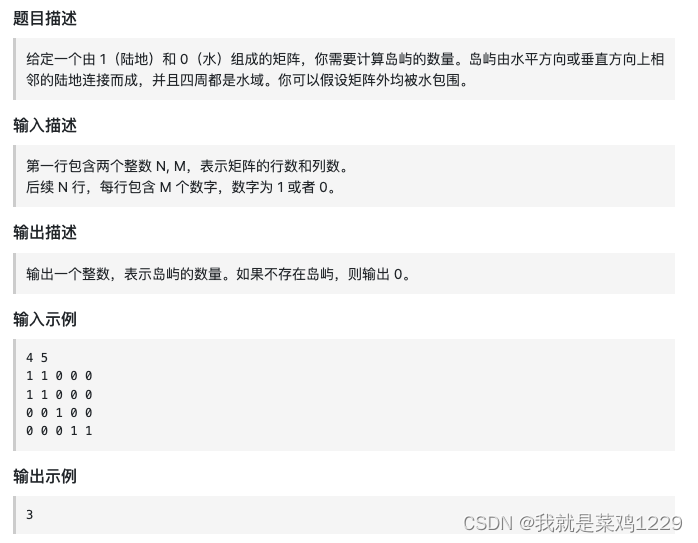
1.1 深度优先搜索
package mainimport "fmt"var direction = [][]int{{0, 1}, {0, -1}, {1, 0}, {-1, 0}}func main() {var M, N intfmt.Scanln(&N, &M)sea := make([][]int, N)visited := make([][]bool, N)for i := 0; i < N; i++ {sea[i] = make([]int, M)visited[i] = make([]bool, M)}for i := 0; i < N; i++ {for j := 0; j < M; j++ {fmt.Scan(&sea[i][j])}}// 开始遍历searesult := 0for i := 0; i < N; i++ {for j := 0; j < M; j++ {if sea[i][j] == 1 && !visited[i][j] {dfs(i, j, &sea, &visited)//bfs(i, j, &sea, &visited)result += 1}}}fmt.Println(result)
}func dfs(x, y int, sea *[][]int, visited *[][]bool) {for i := 0; i < 4; i++ {newX := x + direction[i][0]newY := y + direction[i][1]if newX < 0 || newX >= len(*sea) || newY < 0 || newY >= len((*sea)[0]) {continue}if (*sea)[newX][newY] == 1 && !(*visited)[newX][newY] {(*visited)[newX][newY] = truedfs(newX, newY, sea, visited)}}
}
1.2 广度优先搜索
package mainimport "fmt"var direction = [][]int{{0, 1}, {0, -1}, {1, 0}, {-1, 0}}func main() {var M, N intfmt.Scanln(&N, &M)sea := make([][]int, N)visited := make([][]bool, N)for i := 0; i < N; i++ {sea[i] = make([]int, M)visited[i] = make([]bool, M)}for i := 0; i < N; i++ {for j := 0; j < M; j++ {fmt.Scan(&sea[i][j])}}// 开始遍历searesult := 0for i := 0; i < N; i++ {for j := 0; j < M; j++ {if sea[i][j] == 1 && !visited[i][j] {bfs(i, j, &sea, &visited)result += 1}}}fmt.Println(result)
}func bfs(i, j int, sea *[][]int, visited *[][]bool) {queue := make([][2]int, 0)queue = append(queue, [2]int{i, j})(*visited)[i][j] = truefor len(queue) != 0 {pos := queue[0]for i := 0; i < 4; i++ {newX := pos[0] + direction[i][0]newY := pos[1] + direction[i][1]if newX < 0 || newX >= len(*sea) || newY < 0 || newY >= len((*sea)[0]) {continue}if (*sea)[newX][newY] == 1 && !(*visited)[newX][newY] {queue = append(queue, [2]int{newX, newY})(*visited)[newX][newY] = true}}queue = queue[1:]}
}
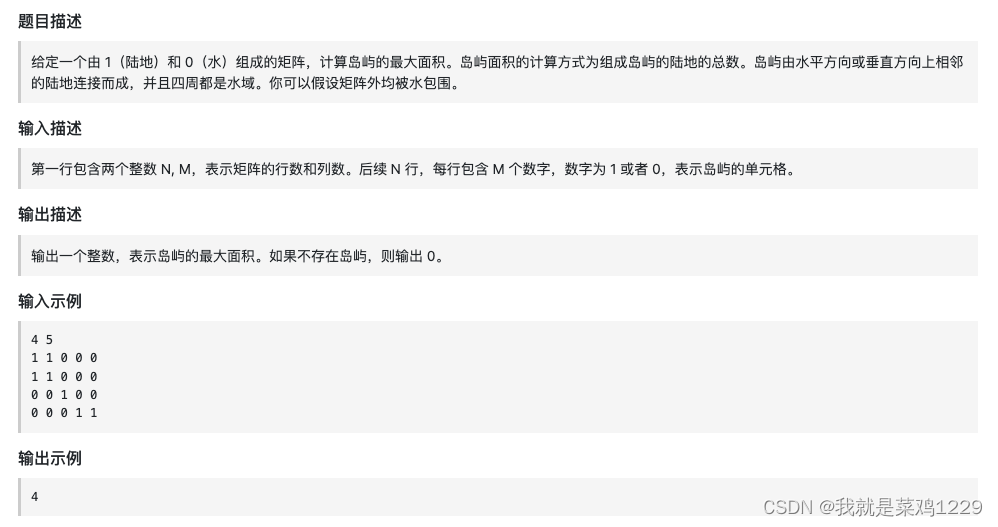
2.岛屿的最大面积
package mainimport "fmt"var direction = [][]int{{0, 1}, {0, -1}, {1, 0}, {-1, 0}}func main() {var M, N intfmt.Scanln(&N, &M)sea := make([][]int, N)visited := make([][]bool, N)for i := 0; i < N; i++ {sea[i] = make([]int, M)visited[i] = make([]bool, M)}for i := 0; i < N; i++ {for j := 0; j < M; j++ {fmt.Scan(&sea[i][j])}}// 开始遍历searesult := 0for i := 0; i < N; i++ {for j := 0; j < M; j++ {if sea[i][j] == 1 && !visited[i][j] {area := bfs(i, j, &sea, &visited)if area>result{result = area}}}}fmt.Println(result)
}func bfs(i, j int, sea *[][]int, visited *[][]bool) int {queue := make([][2]int, 0)queue = append(queue, [2]int{i, j})(*visited)[i][j] = truearea := 0for len(queue) != 0 {pos := queue[0]for i := 0; i < 4; i++ {newX := pos[0] + direction[i][0]newY := pos[1] + direction[i][1]if newX < 0 || newX >= len(*sea) || newY < 0 || newY >= len((*sea)[0]) {continue}if (*sea)[newX][newY] == 1 && !(*visited)[newX][newY] {queue = append(queue, [2]int{newX, newY})(*visited)[newX][newY] = true}}queue = queue[1:]area += 1}return area
}
3.孤岛的总面积

思路:很简单,只需要优先遍历一下四周的所有点即可。
package mainimport "fmt"var direction = [][]int{{0, 1}, {0, -1}, {1, 0}, {-1, 0}}func main() {var M, N intfmt.Scanln(&N, &M)sea := make([][]int, N)visited := make([][]bool, N)for i := 0; i < N; i++ {sea[i] = make([]int, M)visited[i] = make([]bool, M)}for i := 0; i < N; i++ {for j := 0; j < M; j++ {fmt.Scan(&sea[i][j])}}//优先遍历陆地边缘for i := 0; i < N; i++ {if sea[i][0] == 1 && !visited[i][0] {bfs(i, 0, &sea, &visited)}}for i := 0; i < N; i++ {if sea[i][N-1] == 1 && !visited[i][N-1] {bfs(i, N-1, &sea, &visited)}}for i := 0; i < M; i++ {if sea[0][i] == 1 && !visited[0][i] {bfs(0, i, &sea, &visited)}}for i := 0; i < M; i++ {if sea[N-1][i] == 1 && !visited[N-1][i] {bfs(N-1, i, &sea, &visited)}}// 开始遍历searesult := 0for i := 1; i < N-1; i++ {for j := 1; j < M-1; j++ {if sea[i][j] == 1 && !visited[i][j] {area := bfs(i, j, &sea, &visited)result += area}}}fmt.Println(result)
}func bfs(i, j int, sea *[][]int, visited *[][]bool) int {queue := make([][2]int, 0)queue = append(queue, [2]int{i, j})(*visited)[i][j] = truearea := 0for len(queue) != 0 {pos := queue[0]for i := 0; i < 4; i++ {newX := pos[0] + direction[i][0]newY := pos[1] + direction[i][1]if newX < 0 || newX >= len(*sea) || newY < 0 || newY >= len((*sea)[0]) {continue}if (*sea)[newX][newY] == 1 && !(*visited)[newX][newY] {queue = append(queue, [2]int{newX, newY})(*visited)[newX][newY] = true}}queue = queue[1:]area += 1}return area
}
4.沉没孤岛

思路:遍历完四周之后输出visited数组即可。
package mainimport "fmt"var direction = [][]int{{0, 1}, {0, -1}, {1, 0}, {-1, 0}}func main() {var M, N intfmt.Scanln(&N, &M)sea := make([][]int, N)visited := make([][]bool, N)for i := 0; i < N; i++ {sea[i] = make([]int, M)visited[i] = make([]bool, M)}for i := 0; i < N; i++ {for j := 0; j < M; j++ {fmt.Scan(&sea[i][j])}}// 优先遍历陆地边缘for i := 0; i < N; i++ {if sea[i][0] == 1 && !visited[i][0] {bfs(i, 0, N, M, &sea, &visited)}if sea[i][M-1] == 1 && !visited[i][M-1] {bfs(i, M-1, N, M, &sea, &visited)}}for i := 0; i < M; i++ {if sea[0][i] == 1 && !visited[0][i] {bfs(0, i, N, M, &sea, &visited)}if sea[N-1][i] == 1 && !visited[N-1][i] {bfs(N-1, i, N, M, &sea, &visited)}}// 开始遍历visitedfor i := 0; i < N; i++ {for j := 0; j < M; j++ {if visited[i][j] {fmt.Print(1)} else {fmt.Print(0)}fmt.Print(" ")}fmt.Println()}
}func bfs(i, j, N, M int, sea *[][]int, visited *[][]bool) int {queue := make([][2]int, 0)queue = append(queue, [2]int{i, j})(*visited)[i][j] = truearea := 0for len(queue) != 0 {pos := queue[0]queue = queue[1:]area += 1for i := 0; i < 4; i++ {newX := pos[0] + direction[i][0]newY := pos[1] + direction[i][1]if newX < 0 || newX >= N || newY < 0 || newY >= M {continue}if (*sea)[newX][newY] == 1 && !(*visited)[newX][newY] {queue = append(queue, [2]int{newX, newY})(*visited)[newX][newY] = true}}}return area
}
相关文章:
【代码随想录——图论——岛屿问题】
1.岛屿数量 https://kamacoder.com/problempage.php?pid1171 1.1 深度优先搜索 package mainimport "fmt"var direction [][]int{{0, 1}, {0, -1}, {1, 0}, {-1, 0}}func main() {var M, N intfmt.Scanln(&N, &M)sea : make([][]int, N)visited : make…...

异步调用 - 初识
目录 1、引入 2、同步调用 2.1、例子:支付功能 2.2、同步调用的好处 2.3、同步调用的缺点 3、异步调用 3.1、异步调用的方式 3.2、异步调用的优势 3.3、异步调用的缺点 3.4、什么场景下使用异步调用 3.5、MQ技术选型 1、引入 为什么想要异步通信呢&…...

Java 家庭物联网
家庭物联网系统的代码和说明,包括用户认证、设备控制、数据监控、通知和警报、日志记录以及WebSocket实时更新功能。 ### 项目结构 plaintext home-iot-system ├── backend │ └── src │ └── main │ └── java │ └…...
机器学习——随机森林
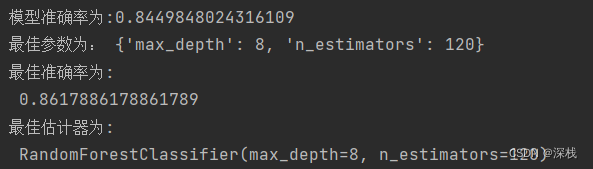
随机森林 1、集成学习方法 通过构造多个模型组合来解决单一的问题。它的原理是生成多个分类器/模型,各自独立的学习和做出预测。这些预测最后会结合成组合预测,因此优于任何一个单分类得到的预测。 2、什么是随机森林? 随机森林是一个包含…...

Java - JDK17语法新增特性(如果想知道Java - JDK17语法新增常见的特性的知识点,那么只看这一篇就足够了!)
前言:Java在2021年发布了最新的长期支持版本:JDK 17。这个版本引入了许多新的语法特性,提升了开发效率和代码可读性。本文将简要介绍一些常见的新特性,帮助开发者快速掌握并应用于实际开发中。 ✨✨✨这里是秋刀鱼不做梦的BLOG ✨…...

Linux-DNS
DNS域名解析服务 1.DNS介绍 DNS 是域名系统 (Domain Name System) 的缩写,是因特网的一项核心服务,它作为可以将域名和IP地址相互映射的一个分布式数据库,能够使人更方便的访问互联网,而不用去记住能够被机器直接读取的IP数串。…...

使用gitlab的CI/CD实现logseq笔记自动发布为单页应用
使用gitlab的CI/CD实现logseq笔记自动发布为单页应用 使用gitlab的CI/CD实现logseq笔记自动发布为单页应用如何实现将logseq的笔记发布成网站使用 logseq-publish-docker 实现手动发布使用gitlab的CI/CD实现自动发布过程中的问题及解决参考资料 使用gitlab的CI/CD实现logseq笔记…...

云联壹云 FinOps:赋能某车企公有云成本管理与精细化运营
背景 某车企,世界 500 强企业,使用了大量的公有云资源,分布于多家公有云,月消费在千万级别。 业务线多且分散,相关的云消耗由一个核心团队进行管理,本次案例的内容将围绕这些云成本的管理展开的。 需求 …...

C#静态类与非静态类
1、静态类 静态类有几个重要的特点: 1)无法实例化:由于静态类不能被实例化,因此它不会占用对象内存。 2)静态成员:静态类只能包含静态成员(静态方法、静态属性、静态事件等)。 3&am…...

亚信安全:《2024云安全技术发展白皮书》
标签 云计算 安全威胁 云安全技术 网络攻击 数据保护 一句话总结 《云安全技术发展白皮书》全面分析了云计算安全威胁的演进,探讨了云安全技术的发展历程、当前应用和未来趋势,强调了构建全面云安全防护体系的重要性。 摘要 云安全威胁演进ÿ…...

GuLi商城-商品服务-API-品牌管理-云存储开通与使用
这里学习下阿里云对象存储 地址:对象存储 OSS_云存储服务_企业数据管理_存储-阿里云 登录支付宝账号,找到了我以前开通的阿里云对象存储 熟悉下API 文档中心 简介_对象存储(OSS)-阿里云帮助中心 我们将用这种方式上传阿里云OSS...

git 命令行初始化并上传项目
XXXX 为项目名称 1. 初始化 cd D:\XXXX git init git remote add origin http://账号192.168.1.231:8088/r/XXXX.git 2. 拉取项目,做本地合并 git pull origin master git fetch origin git merge origin/master 3. 添加注释,上传 git add . git c…...

Spring框架Mvc(2)
1.传递数组 代码示例 结果 2.集合参数存储并进行存储类似集合类 代码示例 postman进行测试 ,测试结果 3.用Json来对其进行数据的传递 (1)Json是一个经常使用的用来表示对象的字符串 (2)Json字符串在字符串和对象…...
Python学习笔记29:进阶篇(十八)常见标准库使用之质量控制中的数据清洗
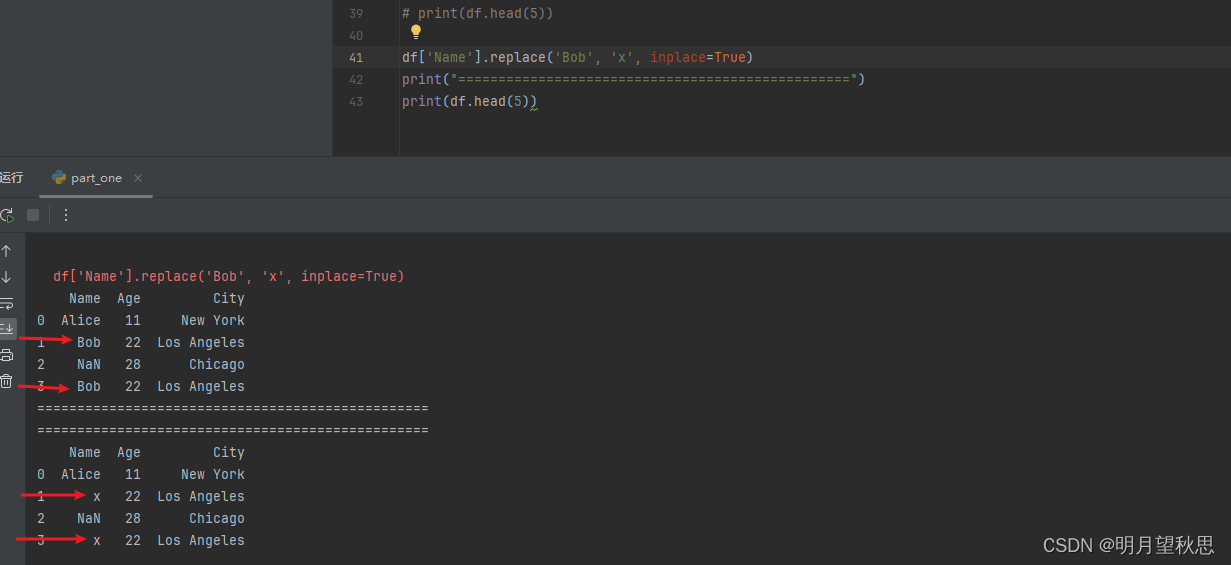
前言 本文是根据python官方教程中标准库模块的介绍,自己查询资料并整理,编写代码示例做出的学习笔记。 根据模块知识,一次讲解单个或者多个模块的内容。 教程链接:https://docs.python.org/zh-cn/3/tutorial/index.html 质量控制…...

【LLM】一、利用ollama本地部署大模型
目录 前言 一、Ollama 简介 1、什么是Ollama 2、特点: 二、Windows部署 1.下载 2.安装 3.测试安装 4.模型部署: 5.注意 三、 Docker部署 1.docker安装 2.ollama镜像拉取 3.ollama运行容器 4.模型部署: 5.注意: 总结 前言…...

Java毕业设计 基于SSM vue新生报到系统小程序 微信小程序
Java毕业设计 基于SSM vue新生报到系统小程序 微信小程序 SSM 新生报到系统小程序 功能介绍 学生 登录 注册 忘记密码 首页 学校公告 录取信息 录取详情 师资力量 教师详情 收藏 评论 用户信息修改 宿舍安排 签到信息 在线缴费 教室分配 我的收藏管理 我要发贴 我的发贴 管理…...
玩转云服务:Oracle Cloud甲骨文永久免费云服务器注册及配置指南
上一篇,带大家分享了:如何薅一台腾讯云服务器。 不过,只有一个月免费额度,到期后需要付费使用。 相对而言,海外云厂商更加慷慨一些,比如微软Azure、甲骨文、亚马逊AWS等。 甲骨文2019年9月就推出了永久免…...

Zabbix——宏
目录 宏的类型 常用宏 定义和使用宏 宏的优先级 使用宏的示例 在 Zabbix 中,宏(Macros)是一个非常强大的功能,允许你在监控配置中使用动态变量。宏可以在各种配置项中使用,例如触发器、动作、通知、图形和模板等。…...

Unity 简单载具路线 Waypoint 导航
前言 在游戏开发和导航系统中,"waypoint" 是指路径中的一个特定位置或点。它通常用于定义一个物体或角色在场景中移动的目标位置或路径的一部分。通过一系列的 waypoints,可以指定复杂的移动路径和行为。以下是一些 waypoint 的具体用途&…...

科普文:微服务之服务网格Service Mesh
一、ServiceMesh概念 背景 随着业务的发展,传统单体应用的问题越来越严重: 单体应用代码库庞大,不易于理解和修改持续部署困难,由于单体应用各组件间依赖性强,只要其中任何一个组件发生更改,将重新部署整…...

高性能Windows流媒体服务器部署:5大核心技术与3种实战架构深度解析
高性能Windows流媒体服务器部署:5大核心技术与3种实战架构深度解析 【免费下载链接】srs-windows 项目地址: https://gitcode.com/gh_mirrors/sr/srs-windows 在Windows平台上构建专业级流媒体服务系统,需要综合考虑协议兼容性、性能优化和部署架…...

[智能体-69]:重新认知MCP:协议不生产智能,只是AI全域交互的标准化基石
MCP只是提供了大模型、编排调度、外部工具能够进行结构化交流的标准,而整个系统的智能主要依赖编排调度,与外部软件系统的交互取决于外部工具,包括外部语音交互、视觉交互、数字化交互。当下MCP(Model Context Protocol࿰…...

开启Python GUI开发新纪元:Tkinter Designer可视化界面自动化生成终极指南
开启Python GUI开发新纪元:Tkinter Designer可视化界面自动化生成终极指南 【免费下载链接】Tkinter-Designer An easy and fast way to create a Python GUI 🐍 项目地址: https://gitcode.com/gh_mirrors/tk/Tkinter-Designer 在Python GUI开发…...

高精度光照检测
光线检测仪,kotlin开发,调用手机感光模块检测室内外光照强度,用途多多,我主要用途孩子写作业检测光照保护视力。 食用方法∶打开即测,速度快,无广告,手机平视即可,无须直视光线。 买…...
)
别再手动测模型了!用Simulink Test Manager实现自动化测试(附Excel表格配置详解)
从手动测试到智能验证:Simulink Test Manager全流程自动化实战指南 在模型开发的迭代过程中,工程师们常常陷入"修改-测试-记录"的循环泥潭。每次参数调整后,手动运行模型、记录数据、比对结果不仅消耗大量时间,更可能因…...

从《吃豆人》到开放世界:聊聊Unity Navigation里Agent Radius和Cost的那些‘潜规则’
从《吃豆人》到开放世界:Unity Navigation中Agent Radius与Cost的隐藏逻辑1980年诞生的《吃豆人》用简单的迷宫路径定义了早期游戏AI的移动规则——幽灵们沿着固定路线巡逻,遇到转角时随机选择方向。这种设计在当时堪称革命性,但以今天的标准…...
)
YOLOv8道路交通信号标志识别检测系统(项目源码+YOLO数据集+模型权重+UI界面+python+深度学习+环境配置)
摘要 道路交通信号标志的自动检测是智能驾驶与交通管理系统中的核心环节。本文基于YOLOv8目标检测算法,构建了一个涵盖21类常见交通信号标志的检测系统,包括禁令标志、指示标志、警告标志及信号灯等。模型在包含1376张训练图像、488张验证图像和229张测…...

为什么你明明很努力,领导却总看不到?问题出在这
许多测试同行在深夜加班排查Bug时,在凌晨赶写自动化脚本时,在对着海量数据做性能分析时,内心都会浮现一个共同的困惑:我明明已经这么拼了,为什么在领导眼里,我依然是个“找茬的”,而不是“创造价…...
3步高效解决TranslucentTB任务栏透明化难题:完整配置指南
3步高效解决TranslucentTB任务栏透明化难题:完整配置指南 【免费下载链接】TranslucentTB A lightweight utility that makes the Windows taskbar translucent/transparent. 项目地址: https://gitcode.com/gh_mirrors/tr/TranslucentTB 你是否厌倦了Window…...
)
【独家首发】国内23家AI语音服务商最新报价数据库(含教育/医疗/金融行业专属折扣码及最小起订量红线)
更多请点击: https://kaifayun.com 第一章:AI语音合成价格与性价比分析 AI语音合成(TTS)服务的定价模式日益多样化,从按字符/音频时长计费到订阅制、API调用包、企业定制方案并存。理解不同服务商的成本结构与实际输出…...