ros1仿真导航机器人 navigation
仅为学习记录和一些自己的思考,不具有参考意义。
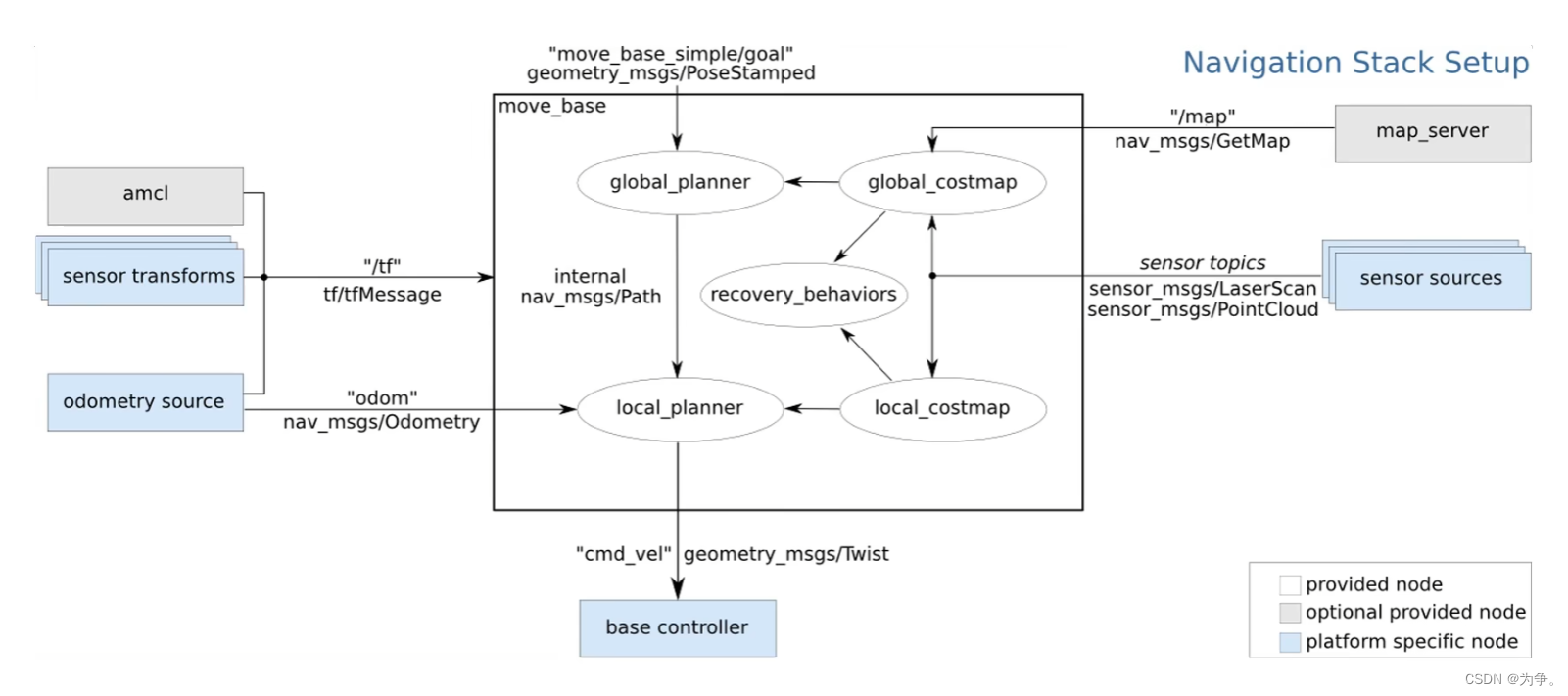
1navigation导航框架
2导航设置过程
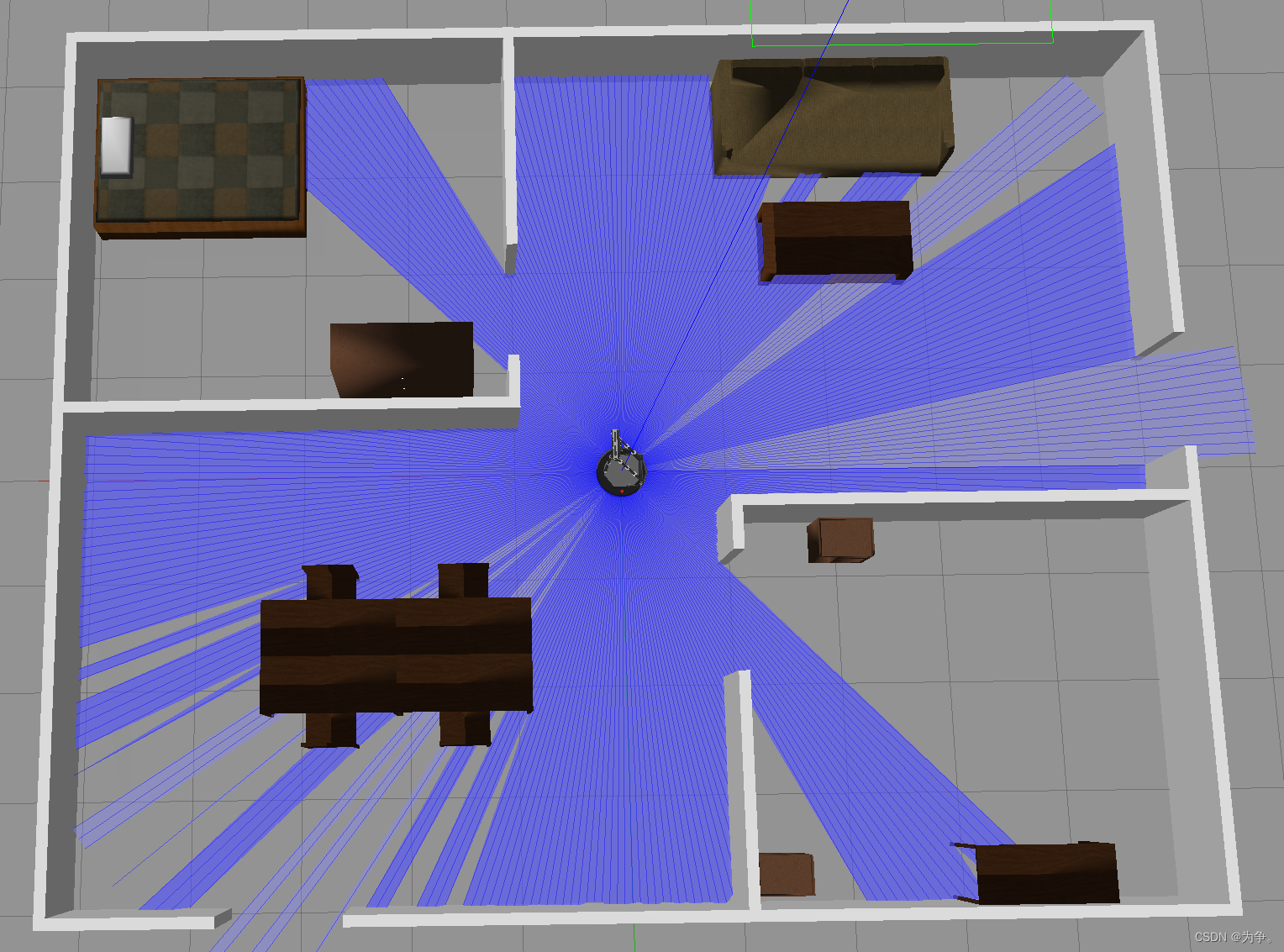
(1)启动仿真环境
roslaunch why_simulation why_robocup.launch
(2)启动move_base导航、amcl定位
roslaunch why_simulation nav.launch
<launch><node pkg="move_base" type="move_base" name="move_base"><rosparam file="$(find why_simulation)/config/costmap_common_params.yaml" command="load" ns="global_costmap" /><rosparam file="$(find why_simulation)/config/costmap_common_params.yaml" command="load" ns="local_costmap" /><rosparam file="$(find why_simulation)/config/global_costmap_params.yaml" command="load" /><rosparam file="$(find why_simulation)/config/local_costmap_params.yaml" command="load" /><param name="base_global_planner" value="global_planner/GlobalPlanner" /> <param name="base_local_planner" value="wpbh_local_planner/WpbhLocalPlanner" /></node><node pkg="map_server" type="map_server" name="map_server" args="$(find why_simulation)/maps/map.yaml"/><node pkg="amcl" type="amcl" name="amcl"/></launch>
(3)启动rviz
rviz
(4)设置目标点
(5)将左右指令完善到launch文件中
<launch><include file="$(find why_simulation)/launch/why_robocup.launch"/><node pkg="move_base" type="move_base" name="move_base"><rosparam file="$(find why_simulation)/config/costmap_common_params.yaml" command="load" ns="global_costmap" /><rosparam file="$(find why_simulation)/config/costmap_common_params.yaml" command="load" ns="local_costmap" /><rosparam file="$(find why_simulation)/config/global_costmap_params.yaml" command="load" /><rosparam file="$(find why_simulation)/config/local_costmap_params.yaml" command="load" /><param name="base_global_planner" value="global_planner/GlobalPlanner" /> <param name="base_local_planner" value="wpbh_local_planner/WpbhLocalPlanner" /></node><node pkg="map_server" type="map_server" name="map_server" args="$(find why_simulation)/maps/map.yaml"/><node pkg="amcl" type="amcl" name="amcl"/><node name="rviz" pkg="rviz" type="rviz" args="-d $(find why_simulation)/rviz/nav.rviz"/></launch>
3全局路径规划算法
功能包简介
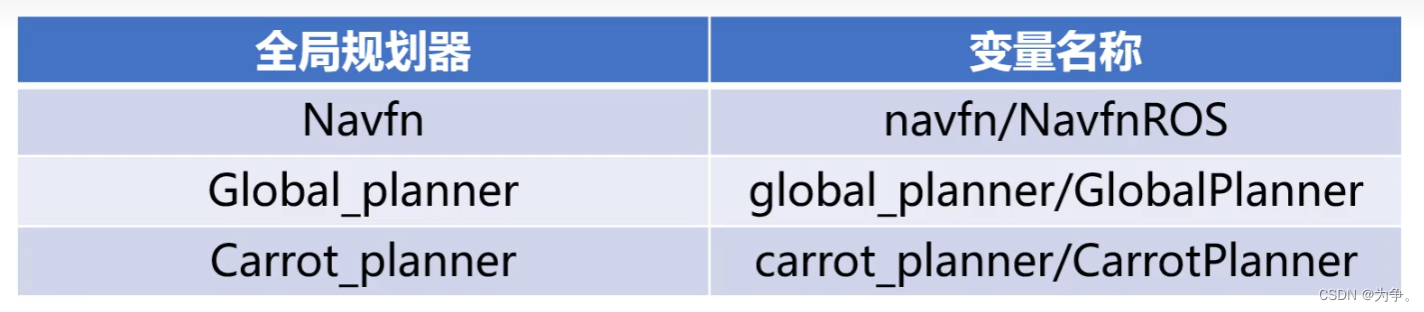
navfn与global_planner功能相同,同时包含了Dijkstra与A*算法。
navfn默认使用Dijkstra算法,算法无问题,但是此包的A*存在问题。
global_planner功能包无bug。
carrot_planner功能包碰到障碍物就停止了,常作为自己书写的规划器的模板。
启动全局规划
<node pkg="move_base" type="move_base" name="move_base"><param name="base_global_planner" value="global_planner/GlobalPlanner" /> </node>golbal_planner默认使用Dijkstra算法,若要切换为A*,则需要以下修改。
<node pkg="move_base" type="move_base" name="move_base"><param name="base_global_planner" value="global_planner/GlobalPlanner" /> .<param name="GlobalPlanner/use_dijkstra" value="false" /> <param name="GlobalPlanner/use_grid_path" value="true" /> </node>
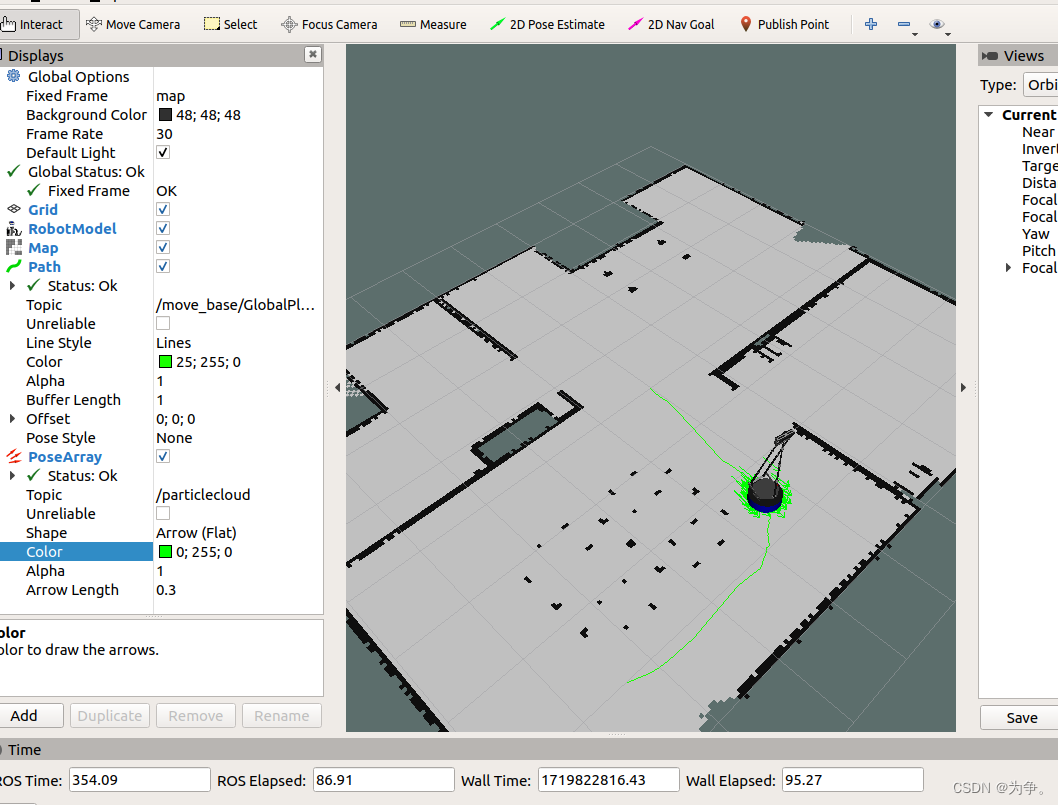
4 amcl
<node pkg="amcl" type="amcl" name="amcl"/>
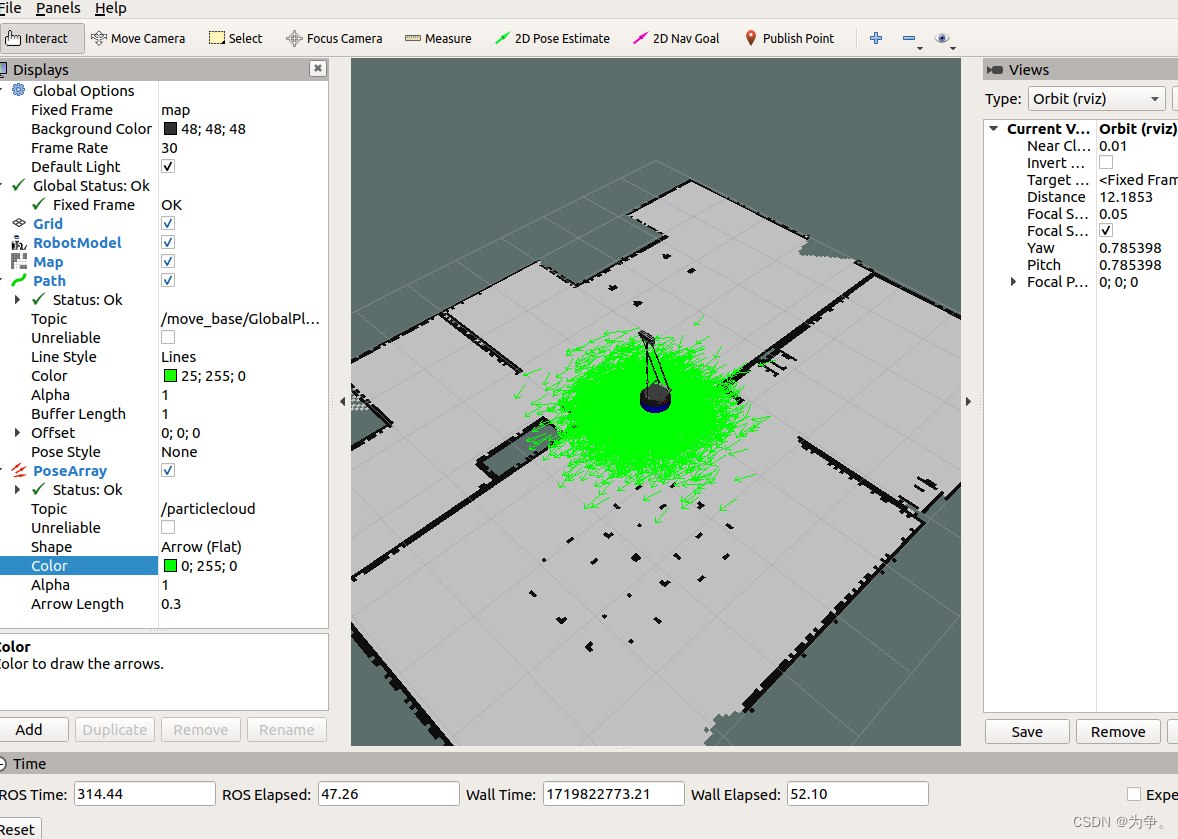
开始导航后真实位置的粒子越来越少
5 costmap
代价地图
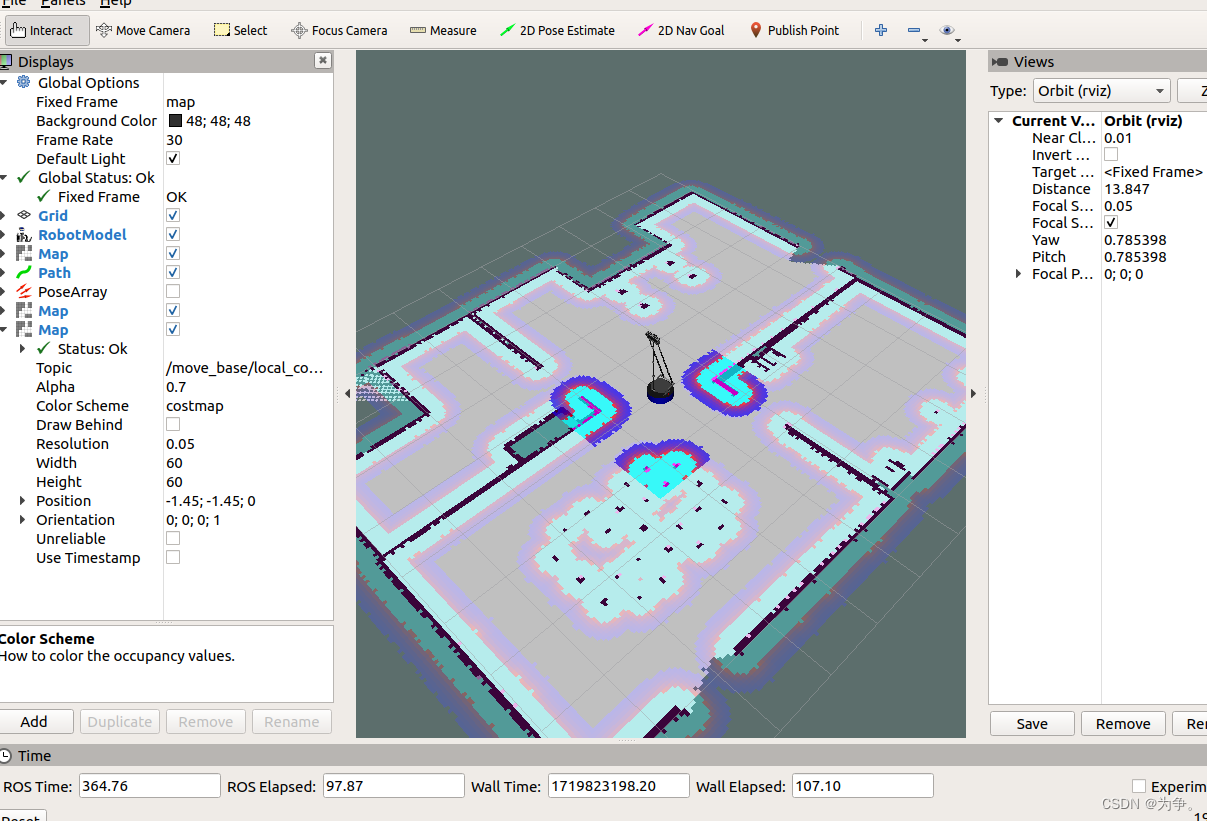
代价地图的参数设置
costmap_common_params.yaml
robot_radius: 0.25
inflation_radius: 0.5
obstacle_range: 6.0
raytrace_range: 6.0
observation_sources: base_lidar
base_lidar: {data_type: LaserScan,topic: /scan, marking: true, clearing: true}global_costmap_params.yaml
global_costmap:global_frame: maprobot_base_frame: base_footprintstatic_map: trueupdate_frequency: 1.0publish_frequency: 1.0transform_tolerance: 1.0recovery_behaviors:- name: 'conservative_reset'type: 'clear_costmap_recovery/ClearCostmapRecovery'- name: 'rotate_recovery'type: 'rotate_recovery/RotateRecovery'- name: 'aggressive_reset'type: 'clear_costmap_recovery/ClearCostmapRecovery'conservative_reset:reset_distance: 2.0layer_names: ["obstacle_layer"]aggressive_reset:reset_distance: 0.0layer_names: ["obstacle_layer"]local_costmap_params.yaml
local_costmap:global_frame: odomrobot_base_frame: base_footprintstatic_map: falserolling_window: truewidth: 3.0height: 3.0update_frequency: 10.0publish_frequency: 10.0transform_tolerance: 1.06 recovery_behaviors
应急机制,在导航进行停滞时,尝试刷新周围障碍物的信息,重新进行全局路径规划。
recovery_behaviors:- name: 'conservative_reset'type: 'clear_costmap_recovery/ClearCostmapRecovery'- name: 'rotate_recovery'type: 'rotate_recovery/RotateRecovery'- name: 'aggressive_reset'type: 'clear_costmap_recovery/ClearCostmapRecovery'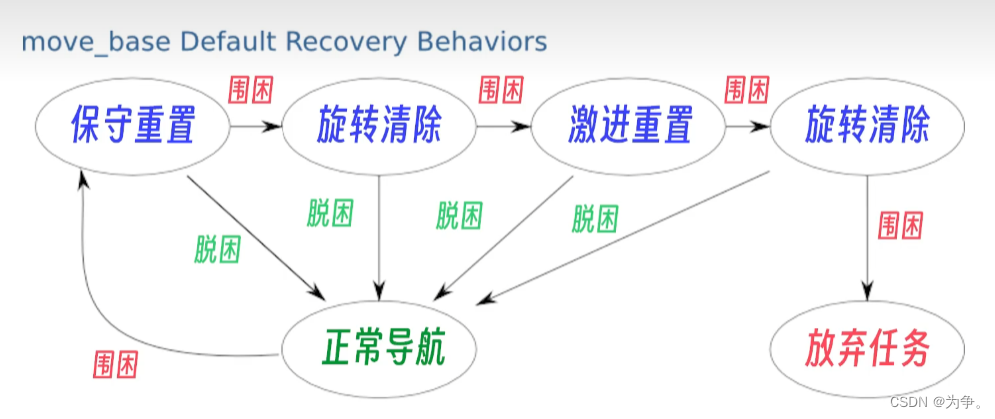
7局部路径规划算法
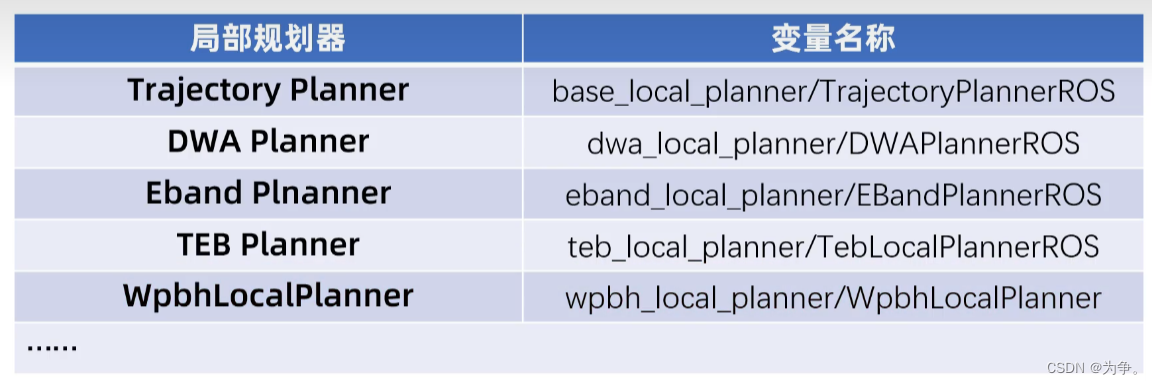
更改launch文件中的以下代码即可更换算法
<param name="base_local_planner" value="wpbh_local_planner/WpbhLocalPlanner" />
DWA测试
<launch><include file="$(find why_simulation)/launch/why_robocup.launch"/><node pkg="move_base" type="move_base" name="move_base"><rosparam file="$(find why_simulation)/config/costmap_common_params.yaml" command="load" ns="global_costmap" /><rosparam file="$(find why_simulation)/config/costmap_common_params.yaml" command="load" ns="local_costmap" /><rosparam file="$(find why_simulation)/config/global_costmap_params.yaml" command="load" /><rosparam file="$(find why_simulation)/config/local_costmap_params.yaml" command="load" /><param name="base_global_planner" value="global_planner/GlobalPlanner" /> <!-- <param name="GlobalPlanner/use_dijkstra" value="false" /> --><!-- <param name="GlobalPlanner/use_grid_path" value="true" /> --><!-- DWA --><param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" /><rosparam file="$(find why_simulation)/config/dwa_local_planner_params.yaml" command="load" /></node><node pkg="map_server" type="map_server" name="map_server" args="$(find why_simulation)/maps/map.yaml"/><node pkg="amcl" type="amcl" name="amcl"/><node name="rviz" pkg="rviz" type="rviz" args="-d $(find why_simulation)/rviz/nav.rviz"/></launch>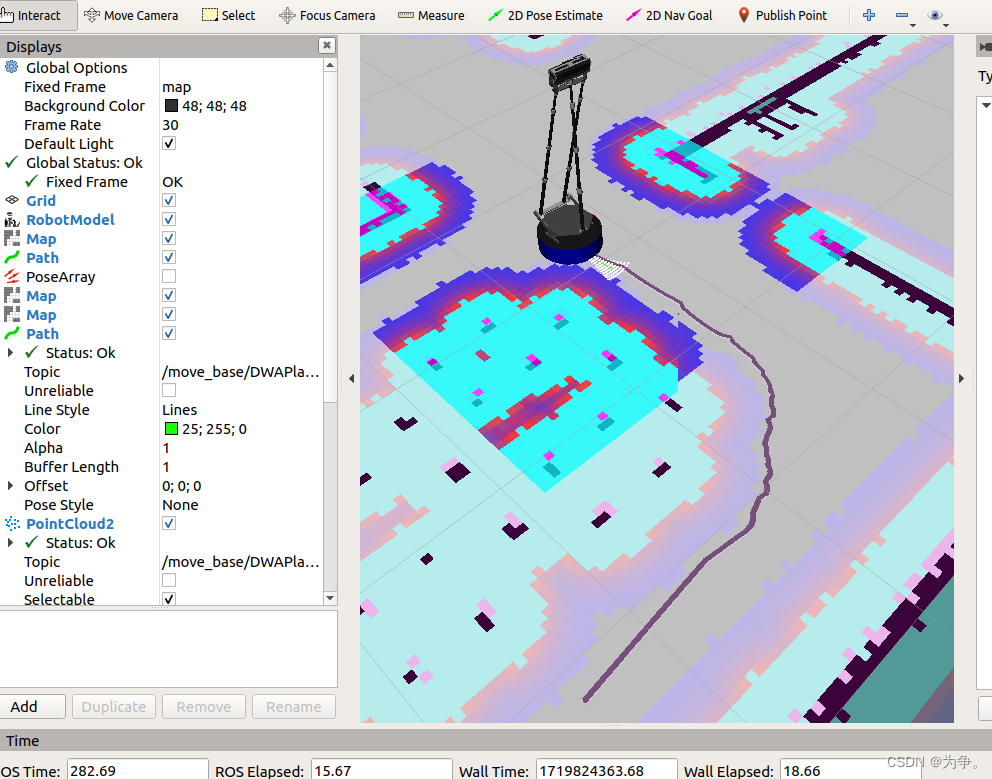
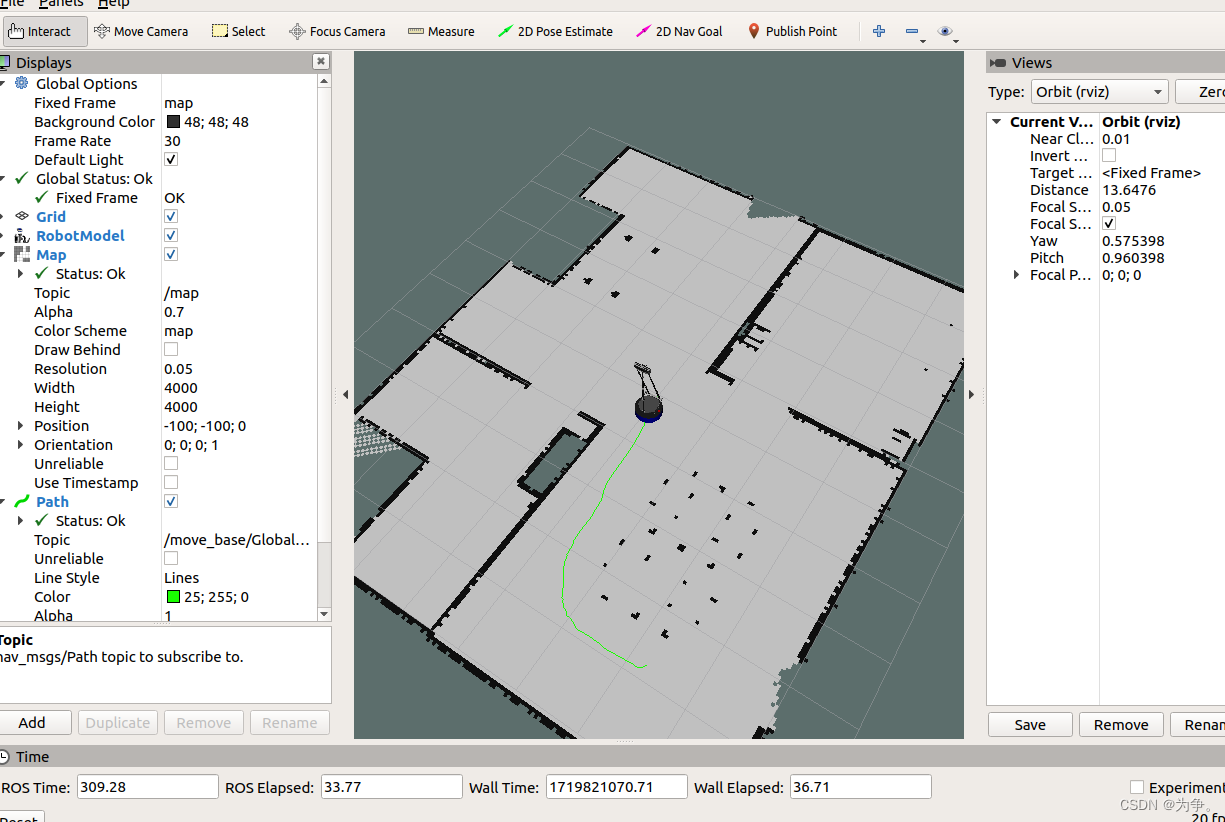
导航结果可以看过许多白色的候选路径,绿色为最优路线。
dwa_local_planner_params.yaml
DWAPlannerROS:# 速度参数max_vel_x: 0.3 # 最大x方向速度min_vel_x: -0.05 # 最小x方向速度(设置负数将会允许倒车)max_vel_y: 0.0 # 差分驱动机器人的最大y方向速度为 0.0min_vel_y: 0.0 # 差分驱动机器人的最小y方向速度为 0.0max_vel_trans: 0.3 # 最大平移速度min_vel_trans: 0.01 # 最小平移速度(建议不要设置为 0.0 )trans_stopped_vel: 0.1 # 当平移速度小于这个值,就让机器人停止acc_lim_trans: 2.5 # 最大平移加速度acc_lim_x: 2.5 # x方向的最大加速度上限acc_lim_y: 0.0 # y方向的加速度上限(差分驱动机器人应该设置为 0.0 )max_vel_theta: 1.0 # 最大旋转速度,略小于基座的功能min_vel_theta: -0.01 # 当平移速度可以忽略时的最小角速度theta_stopped_vel: 0.1 # 当旋转速度小于这个值,就让机器人停止acc_lim_theta: 6.0 # 旋转的加速度上限# 目标容差参数yaw_goal_tolerance: 0.1 # 目标航向容差xy_goal_tolerance: 0.05 # 目标xy容差latch_xy_goal_tolerance: false # 到达目标容差范围后,停止移动,只旋转调整航向# 向前模拟参数sim_time: 1.7 # 模拟时间,默认值 1.7vx_samples: 3 # x方向速度采样数,默认值 3vy_samples: 1 # 差分驱动机器人y方向速度采样数,只有一个样本vtheta_samples: 20 # 旋转速度采样数,默认值 20# 轨迹评分参数path_distance_bias: 32.0 # 靠近全局路径的权重,默认值 32.0goal_distance_bias: 24.0 # 接近导航目标点的权重,默认值 24.0occdist_scale: 0.01 # 控制器避障的权重,默认值 0.01forward_point_distance: 0.325 # 从机器人到评分点的位置,默认值 0.325stop_time_buffer: 0.2 # 在碰撞前机器人必须停止的时间长度,留出缓冲空间,默认值 0.2scaling_speed: 0.25 # 缩放机器人速度的绝对值,默认值 0.25max_scaling_factor: 0.2 # 机器人足迹在高速时能缩放的最大系数,默认值 0.2# 防振动参数oscillation_reset_dist: 1.05 # 重置振动标志前需要行进的距离,默认值 0.05# 辅助调试选项publish_traj_pc : true # 是否在 RViz 里发布轨迹publish_cost_grid_pc: true # 是否在 RViz 里发布代价网格global_frame_id: odom # 基础坐标系# 差分驱动机器人配置holonomic_robot: false # 是否全向移动机器人
在线调参工具
rosrun rqt_reconfigure rqt_reconfigure
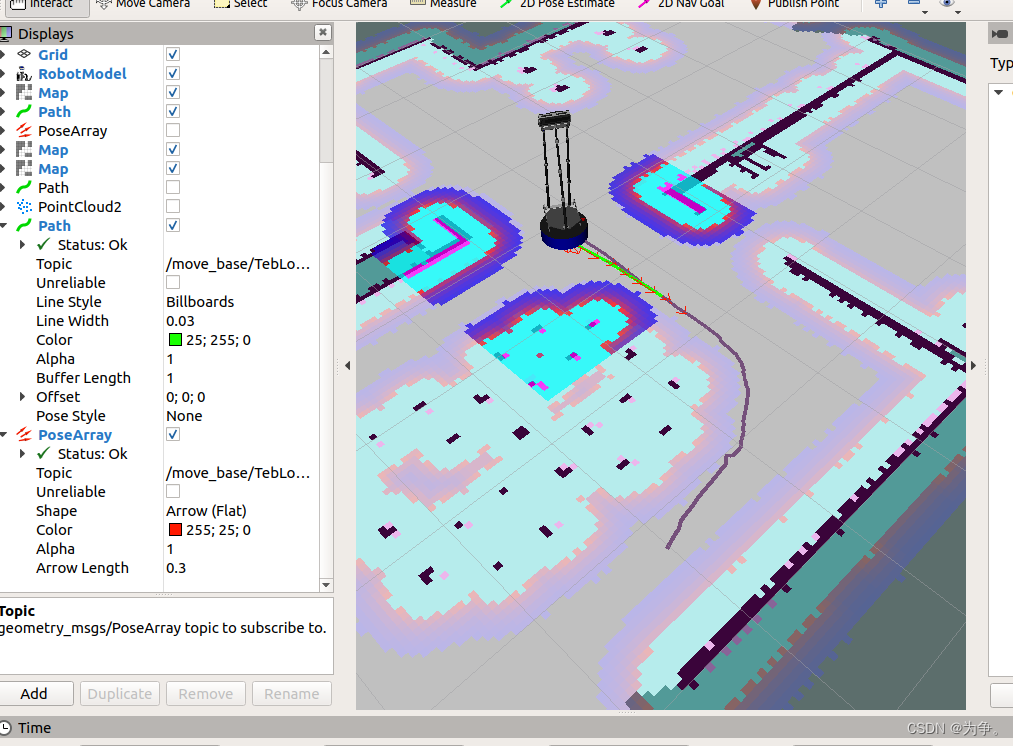
TEB测试
<launch><include file="$(find why_simulation)/launch/why_robocup.launch"/><node pkg="move_base" type="move_base" name="move_base"><rosparam file="$(find why_simulation)/config/costmap_common_params.yaml" command="load" ns="global_costmap" /><rosparam file="$(find why_simulation)/config/costmap_common_params.yaml" command="load" ns="local_costmap" /><rosparam file="$(find why_simulation)/config/global_costmap_params.yaml" command="load" /><rosparam file="$(find why_simulation)/config/local_costmap_params.yaml" command="load" /><param name="base_global_planner" value="global_planner/GlobalPlanner" /> <!-- <param name="GlobalPlanner/use_dijkstra" value="false" /> --><!-- <param name="GlobalPlanner/use_grid_path" value="true" /> --><!-- DWA --><!-- <param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" /> --><!-- <rosparam file="$(find why_simulation)/config/dwa_local_planner_params.yaml" command="load" /> --><!-- TEB --><param name="base_local_planner" value="teb_local_planner/TebLocalPlannerROS" /><rosparam file="$(find why_simulation)/config/teb_local_planner_params.yaml" command="load" /></node><node pkg="map_server" type="map_server" name="map_server" args="$(find why_simulation)/maps/map.yaml"/><node pkg="amcl" type="amcl" name="amcl"/><node name="rviz" pkg="rviz" type="rviz" args="-d $(find why_simulation)/rviz/nav.rviz"/></launch>
相关文章:
ros1仿真导航机器人 navigation
仅为学习记录和一些自己的思考,不具有参考意义。 1navigation导航框架 2导航设置过程 (1)启动仿真环境 roslaunch why_simulation why_robocup.launch (2)启动move_base导航、amcl定位 roslaunch why_simulation nav…...

Python制作动态颜色变换:颜色渐变动效
文章目录 引言准备工作前置条件 代码实现与解析导入必要的库初始化Pygame颜色变换函数主循环 完整代码 引言 颜色渐变动画是一种视觉上非常吸引人的效果,常用于网页设计和图形应用中。在这篇博客中,我们将使用Python创建一个动态颜色变换的动画效果。通…...

Python 异步编程介绍与代码示例
Python 异步编程介绍与代码示例 一、异步编程概述 异步编程是一种编程范式,它旨在处理那些需要等待I/O操作完成或执行耗时任务的情况。在传统的同步编程中,代码会按照顺序逐行执行,直到遇到一个耗时操作,它会阻塞程序的执行直到…...

堆叠的作用
一、为什么要堆叠 传统的园区网络采用设备和链路冗余来保证高可靠性,但其链路利用率低、网络维护成本高,堆叠技术将多台交换机虚拟成一台交换机,达到简化网络部署和降低网络维护工作量的目的。 二、堆叠优势 1、提高可靠性 堆叠系统多台成…...

ubuntu 如何查看某一个网卡的ip地址
在Ubuntu中,你可以使用多种方法来查看某一个网卡的IP地址。以下是一些常用的方法: 使用ip命令: ip命令是现代Linux系统中用于显示和操作路由、网络设备、策略路由和隧道的工具。要查看所有网络接口的IP地址,你可以使用:…...

跨界客户服务:拓展服务边界,创造更多价值
在当今这个日新月异的商业时代,跨界合作已不再是新鲜词汇,它如同一股强劲的东风,吹散了行业间的壁垒,为企业服务创新开辟了前所未有的广阔天地。特别是在客户服务领域,跨界合作正以前所未有的深度和广度,拓…...

linux驱动编程 - kfifo先进先出队列
简介: kfifo是Linux Kernel里面的一个 FIFO(先进先出)数据结构,它采用环形循环队列的数据结构来实现,提供一个无边界的字节流服务,并且使用并行无锁编程技术,即当它用于只有一个入队线程和一个出…...

JS 四舍五入使用整理
一、Number.toFixed() 把数字转换为字符串,结果的小数点后有指定位数的数字,重点返回的数据类型为字符串 toFixed() 方法将一个浮点数转换为指定小数位数的字符串表示,如果小数位数高于数字,则使用 0 来填充。 toFixed() 方法可把 Number 四舍五入为指定小数位数的数字。…...

上万组风电,光伏,用户负荷数据分享
上万组风电,光伏,用户负荷数据分享 可用于风光负荷预测等研究 获取链接🔗 https://pan.baidu.com/s/1izpymx6R3Y8JsFdx42rL0A 提取码:381i 获取链接🔗 https://pan.baidu.com/s/1izpymx6R3Y8JsFdx42rL0A 提取…...

在物联网快速发展的趋势下,Java 怎样优化对低功耗、资源受限的边缘设备的支持,保障物联网应用的稳定运行?
在物联网快速发展的趋势下,Java可以通过以下方式优化对低功耗、资源受限的边缘设备的支持,以保障物联网应用的稳定运行: 精简Java运行环境:针对边缘设备的资源限制,可以使用精简型的Java运行环境,避免不必要…...

java-HashSet 源码分析 1
## 深入分析 Java 中的 HashSet 源码 HashSet 是 Java 集合框架中的一个重要类,它基于哈希表实现,用于存储不重复的元素。HashSet 允许 null 元素,并且不保证元素的顺序。本文将详细分析 HashSet 的源码,包括其数据结构、构造方法…...

K8S 部署 EFK
安装说明 系统版本为 Centos7.9 内核版本为 6.3.5-1.el7 K8S版本为 v1.26.14 ES官网 开始安装 本次安装使用官方ECK方式部署 EFK,部署的是当前的最新版本。 在 Kubernetes 集群中部署 ECK 安装自定义资源 如果能打开这个网址的话直接用这个命令安装,打不开的话…...

AI Earth应用—— 在线使用sentinel数据VV和VH波段进行水体提取分析(昆明抚仙湖、滇池为例)
AI Earth 本文的主要目的就是对水体进行提取,这里,具体的操作步骤很简单基本上是通过,首页的数据检索,选择需要研究的区域,然后选择工具箱种的水体提取分析即可,剩下的就交给阿里云去处理,结果如下: 这是我所选取的一景影像: 详情 卫星: Sentinel-1 级别: 1 …...

基于Hadoop平台的电信客服数据的处理与分析③项目开发:搭建基于Hadoop的全分布式集群---任务9:HBase的安装和部署
任务描述 任务内容为HBase的安装部署与测试。 任务指导 HBase集群需要整个集群所有节点安装的HBase版本保持一致,并且拥有相同的配置 具体配置步骤如下: 1. 解压缩HBase的压缩包 2. 配置HBase的环境变量 3. 修改HBase的配置文件,HBase…...

go语言day09 通道 协程的死锁
Go语言学习——channel的死锁其实没那么复杂 - JackieZheng - 博客园 (cnblogs.com) 目录 通道 创建通道 1)无缓冲通道 2)有缓冲通道 通道的使用 1) 值从通道入口进 2) 值从通道出口出 信道死锁: 0)死锁现场0 1)死…...

黑马的ES课程中的不足
在我自己做项目使用ES的时候,发现了黑马没教的方法,以及一些它项目的小问题 搜索时的匹配方法 这个boolQuery().should 我的项目是通过文章的标题title和内容content来进行搜索 但是黑马它的项目只用了must 如果我们的title和content都用must&#x…...

STM32 中断编程入门
目录 一、中断系统 1、中断的原理 2、中断类型 外部中断 定时器中断 DMA中断 3、中断处理函数 中断标志位清除 中断服务程序退出 二、实际应用 中断控制LED 任务要求 代码示例 中断控制串口通信 任务要求1 代码示例 任务要求2 代码示例 总结 学习目标&…...

使用maven搭建一个SpingBoot项目
1.首先创建一个maven项目 注意选择合适的jdk版本 2.添加依赖 2.在pom.xml中至少添加依赖 spring-boot-starter-web 依赖,目的是引入Tomcat,以及SpringMVC等,使项目具有web功能。 <!-- 引入 包含tomcat,SpringMVC,…...

使用 HTTPS 已成为网站的标配了
网站使用HTTPS的原因 背景:十年前,HTTPS并不普遍,但随着网络安全意识的提高,现在已成为网站标配。 网站升级到HTTPS的动机 安全问题:HTTP缺乏安全机制,易被窃取和篡改数据。例如,电信运营商劫…...

前后端分离Nginx
背景 旧的部署方式是将前端代码打包进后端包的resource server {listen 80;listen 443 ssl;server_name xxx.test.com;location / {proxy_pass http://xxx.test.com;} }后端:https:// xxx.test.com/simcard/querySimcard 前端:https:// x…...

Scroll Reverser:让Mac的多设备滚动体验回归直觉的免费神器
Scroll Reverser:让Mac的多设备滚动体验回归直觉的免费神器 【免费下载链接】Scroll-Reverser Per-device scrolling prefs on macOS. 项目地址: https://gitcode.com/gh_mirrors/sc/Scroll-Reverser 你是否曾经在MacBook的触控板和鼠标之间切换时࿰…...

基于ATmega2560与ISD1700的智能语音时钟:硬件选型、软件架构与避坑指南
1. 项目概述与核心价值去年折腾那个用ATMega328驱动三块显示屏的时钟时,我主要精力都花在了如何在320x240的TFT屏幕上把时间、日期和图标画得又准又好看上。项目在《Elektor》杂志上发表后,一位热心的读者给我提了个新想法:能不能做个会“说话…...

从CTF题看RSA安全:为什么你的密钥不能‘共享素数’?
从CTF实战看RSA密钥安全:那些年我们踩过的坑 在网络安全竞赛和实际渗透测试中,RSA算法的错误实现方式往往成为突破的关键点。本文将通过典型CTF赛题案例,揭示五种常见RSA实现漏洞背后的数学原理和安全启示,帮助开发者在实际项目中…...

多模型聚合平台如何助力网站AIB测试与选型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 多模型聚合平台如何助力网站AIB测试与选型 对于网站产品经理而言,首页文案的生成质量直接影响用户的第一印象和转化率。…...
)
【C++】零基础入门 · 第 4 节:循环结构(while、for、do-while)
上一节我们学习了条件判断,这一节来学习循环结构。循环让程序能够重复执行某段代码,直到满足特定条件为止。C 提供了三种循环语句:while、for 和 do-while。 1. while 循环:先判断后执行 while 循环在每次执行前先检查条件&#x…...

HKMG工艺的“阿喀琉斯之踵”:聊聊那个无法移除的SiON界面层与未来0.3nm的挑战
HKMG工艺的隐形枷锁:SiON界面层的物理宿命与亚纳米级突围战 在半导体工艺演进的史诗中,HKMG(高K金属栅)技术曾被寄予厚望——它用金属栅极替代传统多晶硅,搭配高K介质材料HfO₂,一举解决了栅极耗尽和漏电流…...

线程池面试
线程池面试|一页极简口述满分版(高级开发必背) 一、核心概念解析(口述满分) 线程池核心作用:实现线程复用,规避线程频繁创建、销毁的性能开销,同时实现并发限流、服务熔断防护、异步…...
:setup / onboard 与本地配置初始化)
OpenClaw 源码解析(五):setup / onboard 与本地配置初始化
1. 本期目标 上一期我们分析了 OpenClaw 的 CLI 启动链路:用户输入 openclaw 命令后,程序会先经过 entry.ts、run-main、Commander Program 构建和命令注册流程,然后再进入具体命令逻辑。 这一期继续往下看,重点分析两个最基础的…...

代码质量保卫战,从人工Review到DeepSeek自动审查的7天转型全记录
更多请点击: https://kaifayun.com 第一章:代码质量保卫战的范式转移 过去十年,代码质量保障已从“事后拦截”转向“全程共生”。单元测试覆盖率不再是KPI终点,而是开发流程的呼吸节律;静态分析不再停留于CI流水线末尾…...

长期使用Taotoken Token Plan套餐带来的成本节约感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用Taotoken Token Plan套餐带来的成本节约感受 1. 项目背景与成本挑战 我们团队负责一个持续进行文本分析与内容生成的内部…...