使用myCobot280和OAK-D OpenCV DepthAI摄像头制作一个实时脸部跟踪的手机支架!
引言
由于YouTube和Netflix的出现,我们开始躺着看手机。然而,长时间用手拿着手机会让人感到疲劳。这次我们制作了一个可以在你眼前保持适当距离并调整位置的自动移动手机支架,让你无需用手拿着手机。请务必试试!
准备工作
这次我们使用了Elephant Robotics公司的机械臂。与其他产品相比,它价格便宜,作为初学者也相对容易上手。

myCobot 280 Pi- 6 DOF Collaborative Robot (Raspberry Pi version)
为了让摄像头跟踪面部,我们采用了OAK-D OpenCV DepthAI摄像头。它不仅仅是进行视频捕捉,还能辅助进行面部识别所需的神经网络运算,因此即使微控制器没有GPU,也能高速进行面部识别。


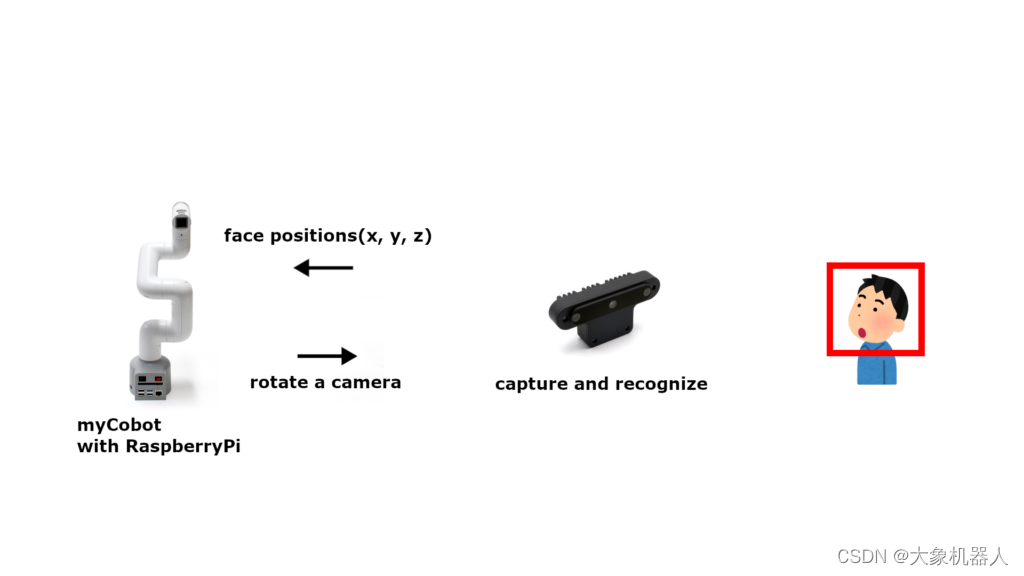
这是一个可以始终将显示屏调整到眼前适当距离的手机支架。主要由OAK-D摄像头和机械臂“myCobot”构成。OAK-D摄像头不仅可以获取视频,还可以获取深度信息,从而计算出摄像头到脸部的距离。myCobot是一款具有6个旋转轴的机械臂,能够实现多种动作。通过OAK-D摄像头获取的图像来计算脸部的三维位置,myCobot可以将手机显示屏移动到眼前。这样一来,即使不用手拿着手机也能享受视频。
将OAK-D摄像头和手机安装到myCobot上
myCobot的末端有四个M2.6的螺丝孔。我们3D打印了一个手机壳,并利用这些螺丝孔将壳子固定到myCobot上,从而固定手机。
另一方面,OAK-D摄像头有一个1/4英寸的螺丝孔。我们在3D打印的壳子上也开了一个用于1/4英寸螺丝的孔,以便固定摄像头。

作为参考,这里放置了此次使用的STL数据。
Smartphone holders with a camera for myCobot by techlife_hacking - Thingiverse
机械臂的动作
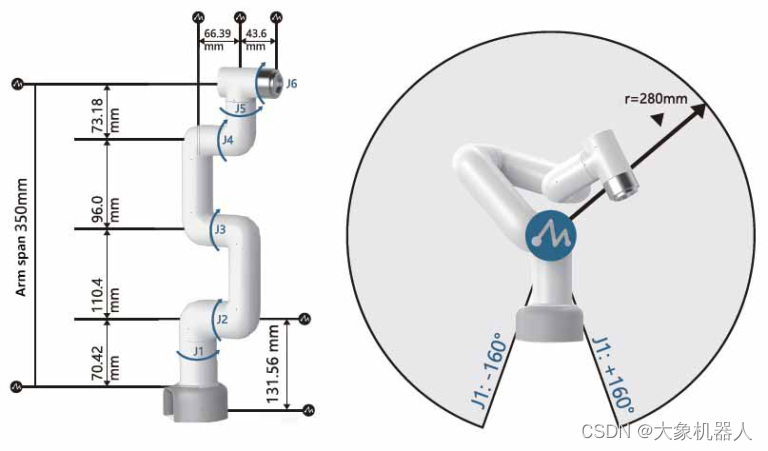
X方向的移动:J1轴的旋转
Y方向的移动:J4轴的旋转
Z方向的移动:J2和J3轴的旋转(J2和J3反向旋转)
使用J2和J3轴来进行深度方向的移动。仅移动J2会影响Y方向,因此让J3以与J2轴相反的方向旋转相同的量,以减小影响。
3D Face Tracking
在XY平面上跟踪面部
通过对OAK-D摄像头获取的图像进行面部检测,可以获取相机画面中面部的坐标(x, y)。
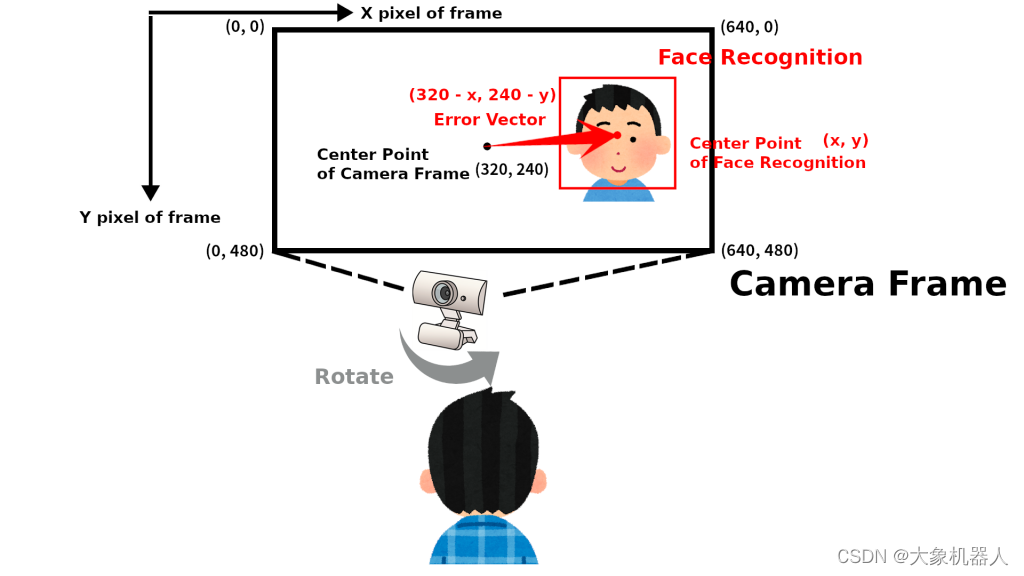
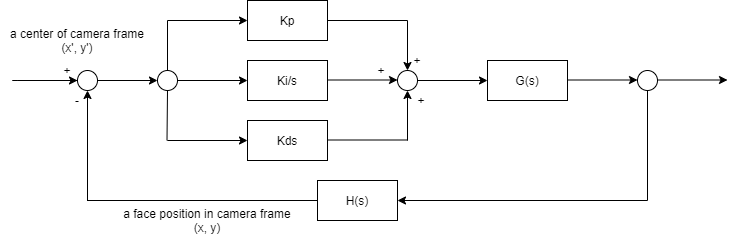
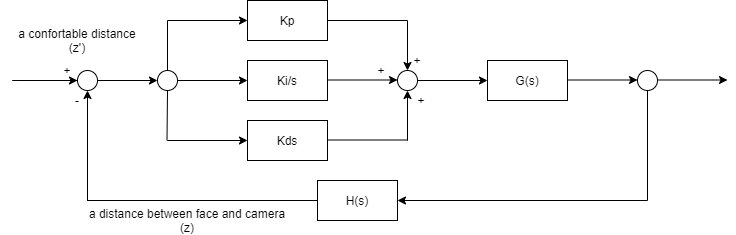
将OAK-D摄像头画面的中心坐标设为目标值,将面部识别获得的面部坐标(x, y)作为反馈值进行PID控制。
深度方向(Z方向)上的面部跟踪
由于OAK-D摄像头配备了立体摄像头,因此不仅可以获取平面上的面部坐标,还可以获取深度方向的面部坐标z。将面部与显示屏之间既不过近也不过远的距离设为目标值,利用立体摄像头测量的面部坐标(z)作为反馈值进行PID控制。
myCobot和OAK摄像头
将OAK摄像头和myCobot附带的Raspberry Pi通过USB连接。OAK摄像头计算出面部的目标坐标,myCobot附带的Raspberry Pi根据这些坐标进行PID控制,以调整摄像头的方向。
环境
为myCobot附带的Raspberry Pi进行环境构建。
myCobot
在myCobot的Raspberry Pi版本中,只要接通电源,就可以立即使用。机械臂可以通过Python进行操作,并且官方也提供支持。
# test
from pymycobot.mycobot import MyCobotmycobot = MyCobot('/dev/ttyUSB0')
# 使其直立
# go zero
mycobot.send_angles([0,0,0,0,0,0], 80)OAK-D OpenCV DepthAI摄像头
安装用于操作OAK-D摄像头的depthai库。
# install dependency
sudo curl -fL http://docs.luxonis.com/_static/install_dependencies.sh | bash# get sources
git clone https://github.com/luxonis/depthai.git# install depthai
python3 install_requirements.py演示
环境搭建完成后,请运行演示程序。若摄像头能够在保持一定距离的同时追踪面部,则说明系统运行正常。
# get demo sources
git clone https://github.com/tech-life-hacking/depthai.git# execute demo
python3 depthai_demo.pyPID的调整
如果myCobot的动作不稳定,请调整PID值。
# settings
PID_control.PID(P值, I值, D值)
pidX.setTargetPosition(帧中的点的位置(X方向): 范围0-1, 0.5是中心)
pidY.setTargetPosition(帧中的点的位置(Y方向): 范围0-1, 0.5是中心)
pidZ.setTargetPosition(摄像头和面部的距离(米), 0.5米 = 50厘米)#enPID_control.PID(P value, I value, D value)
pidX.setTargetPosition(Position of the point in the frame (X direction): Range 0-1, 0.5 is the center)
pidY.setTargetPosition(Position of the point in the frame (Y direction): Range 0-1, 0.5 is the center)
pidZ.setTargetPosition(Distance between the camera and the face (meters), 0.5m = 50cm)# default
pidX = PID_control.PID(10, 10, 3.75)
pidY = PID_control.PID(6.5, 5, 2.5)
pidZ = PID_control.PID(50, 30, 20)
pidX.setTargetPosition(0.5)
pidY.setTargetPosition(0.5)
pidZ.setTargetPosition(0.5)确定目标值
确定myCobot摄像头指向目标值的代码如下。nnData[0]表示OAK-D摄像头检测到的面部包围框的四个角的坐标。将这四个角的坐标和除以2,可以得出包围框的中心点。spatialCoordinates.z是一个方法,用于返回摄像头和面部之间的距离测量结果。
x = (self._nnData[0].xmin + self._nnData[0].xmax) / 2
y = (self._nnData[0].ymin + self._nnData[0].ymax) / 2
z = int(self._nnData[0].spatialCoordinates.z) / 1000结语
这次我们使用OAK-D摄像头进行面部识别,并利用能够做出复杂动作的机械臂进行面部跟踪。通过计算机视觉捕捉人类的动作,并据此操控机械臂,可以发现它能够进行非常多样的动作。希望这能为大家的开发提供参考。
相关文章:
使用myCobot280和OAK-D OpenCV DepthAI摄像头制作一个实时脸部跟踪的手机支架!
引言 由于YouTube和Netflix的出现,我们开始躺着看手机。然而,长时间用手拿着手机会让人感到疲劳。这次我们制作了一个可以在你眼前保持适当距离并调整位置的自动移动手机支架,让你无需用手拿着手机。请务必试试! 准备工作 这次我们…...
Xilinx FPGA:vivado关于单端ROM的一个只读小实验
一、实验要求 将生成好的voe文件里的数据使用rom读取出来,采用串口工具发送给电脑(当按键来临时)。 二、程序设计 按键消抖模块: timescale 1ns / 1ps module key_debounce(input sys_clk ,input rst_n…...

集成学习(一)Bagging
前边学习了:十大集成学习模型(简单版)-CSDN博客 Bagging又称为“装袋法”,它是所有集成学习方法当中最为著名、最为简单、也最为有效的操作之一。 在Bagging集成当中,我们并行建立多个弱评估器(通常是决策…...

Docker 中查看及修改 Redis 容器密码的实用指南
在使用 Docker 部署 Redis 容器时,有时我们需要查看或修改 Redis 的密码。本文将详细介绍如何在 Docker 中查看和修改 Redis 容器的密码,帮助你更好地管理和维护你的 Redis 实例。 一、查看 Redis 容器密码 通常在启动 Redis 容器时,我们会…...

CH09_JS的循环控制语句
第9章:Javascript循环控制语句 本章目标 掌握break关键字的使用掌握continue关键字的使用 课程回顾 for循环的特点和语法while循环的特点和语法do-while循环的特点和语法三个循环的区别 讲解内容 1. break关键字 为什么要使用break关键字 生活中,描…...

Python实现Mybatis Plus
Python实现Mybatis Plus from flask import g from sqlalchemy import asc, descclass QueryWrapperBuilder:conditions {}order_by_info {}def __new__(cls, *args, **kwargs):obj super(QueryWrapperBuilder, cls).__new__(cls)return objdef __init__(self, obj):self.o…...
卷积神经网络和Vision Transformer的对比之归纳偏置
卷积神经网络(CNN)和视觉变换器(Vision Transformer,ViT)是两种常用于图像处理的深度学习模型。它们各有优缺点,其中一个重要的区别在于它们对图像数据的“归纳偏置”(inductive bias࿰…...

Java之网络面试经典题(一)
目录 编辑 一.Session和cookie Cookie Session 二.HTTP和HTTPS的区别 三.浅谈HTTPS为什么是安全的? 四.TCP和UDP 五.GET和Post的区别 六.forward 和 redirect 的区别? 本专栏全是博主自己收集的面试题,仅可参考,不能相…...

Failed to download metadata for repo ‘docker-ce-stable‘
这个问题是由于在安装 clamav 和 clamav-update 时,无法下载 Docker CE Stable 库的元数据,可能的原因是网络连接超时或访问该网址受限。以下是一些可能的解决办法: 检查网络连接: 确保服务器的网络连接正常,尤其是与互…...

vant拍摄视频上传以及多张图片上传
数据定义 data() {return {fileList: [],vedioList: [],formData: ,fileTypes: image/png,image/jpeg,image/jpg,image/jpeg,} }, beforeMount() {this.formData new FormData() },拍摄视频上传 <van-uploaderv-if"radio 1"v-model"vedioList"accep…...

如何用手机拍出高级感黑白色调照片?华为Pura70系列XMAGE演绎黑白艺术
在影像的世界里,色彩可以让画面更丰富,更具有表现力,往往也能带来更多的视觉冲击。但有时候,黑白却有着一种独特的魅力。华为Pura 70系列XMAGE黑白风格,则给我们了一把通过纯粹艺术大门的钥匙。 XMAGE黑白并非简单的色…...

Cartographer前后端梳理
0. 简介 最近在研究整个SLAM框架的改进处,想着能不能从Cartographer中找到一些亮点可以用于参考。所以这一篇博客希望能够梳理好Cartographer前后端优化,并从中得到一些启发。carto整体是graph-based框架,前端是scan-map匹配,后端…...

Java面试题系列 - 第3天
题目:Java集合框架详解与高效使用策略 背景说明:Java集合框架是Java标准库的重要组成部分,提供了一系列容器类,如List、Set、Map等,用于存储和操作集合数据。熟练掌握集合框架的使用,对于编写高效、健壮的…...

【Spring Boot】Spring Boot简介
1、概述 Spring Boot是一个用于创建独立、生产级别的基于Spring的应用程序的开发框架。旨在简化Spring应用的初始搭建和开发过程。它通过自动配置和大量默认配置,使得开发者能够快速搭建一个独立的Spring应用,无需进行大量的手动配置。 2、主要特点 快…...

Akamai+Noname强强联合 | API安全再加强
最近,Akamai正式完成了对Noname Security的收购。本文我们将向大家介绍,经过本次收购后,Akamai在保护API安全性方面的后续计划和未来愿景。 Noname Security是市场上领先的API安全供应商之一,此次收购将让Akamai能更好地满足日益增…...

第四届BPAA算法大赛成功举办!共研算法未来
大家好,我是herosunly。985院校硕士毕业,现担任算法研究员一职,热衷于机器学习算法研究与应用。曾获得阿里云天池比赛第一名,CCF比赛第二名,科大讯飞比赛第三名。拥有多项发明专利。对机器学习和深度学习拥有自己独到的…...

2024第三届中国医疗机器人大会第一轮通知
2024第三届中国医疗机器人大会第一轮通知 大会背景 医疗机器人技术正以前所未有的速度在主流医学领域取得卓越进展,新应用、新技术不断涌现,使得该领域在过去一年中取得了令人惊叹的增长。然而,这仅仅是冰山一角,未来的发展空间仍…...
常见算法和Lambda
常见算法和Lambda 文章目录 常见算法和Lambda常见算法查找算法基本查找(顺序查找)二分查找/折半查找插值查找斐波那契查找分块查找扩展的分块查找(无规律的数据) 常见排序算法冒泡排序选择排序插入排序快速排序递归快速排序 Array…...

自动缩放 win7 远程桌面
https://mremoteng.org/download 用这个软件,下载 zip 版,不需要管理员权限 在这里找到的,选票最高的一个就是 https://superuser.com/questions/1030041/remote-desktop-zoom-and-full-screen-how-win10-remote-win7-2008-2003-ho...
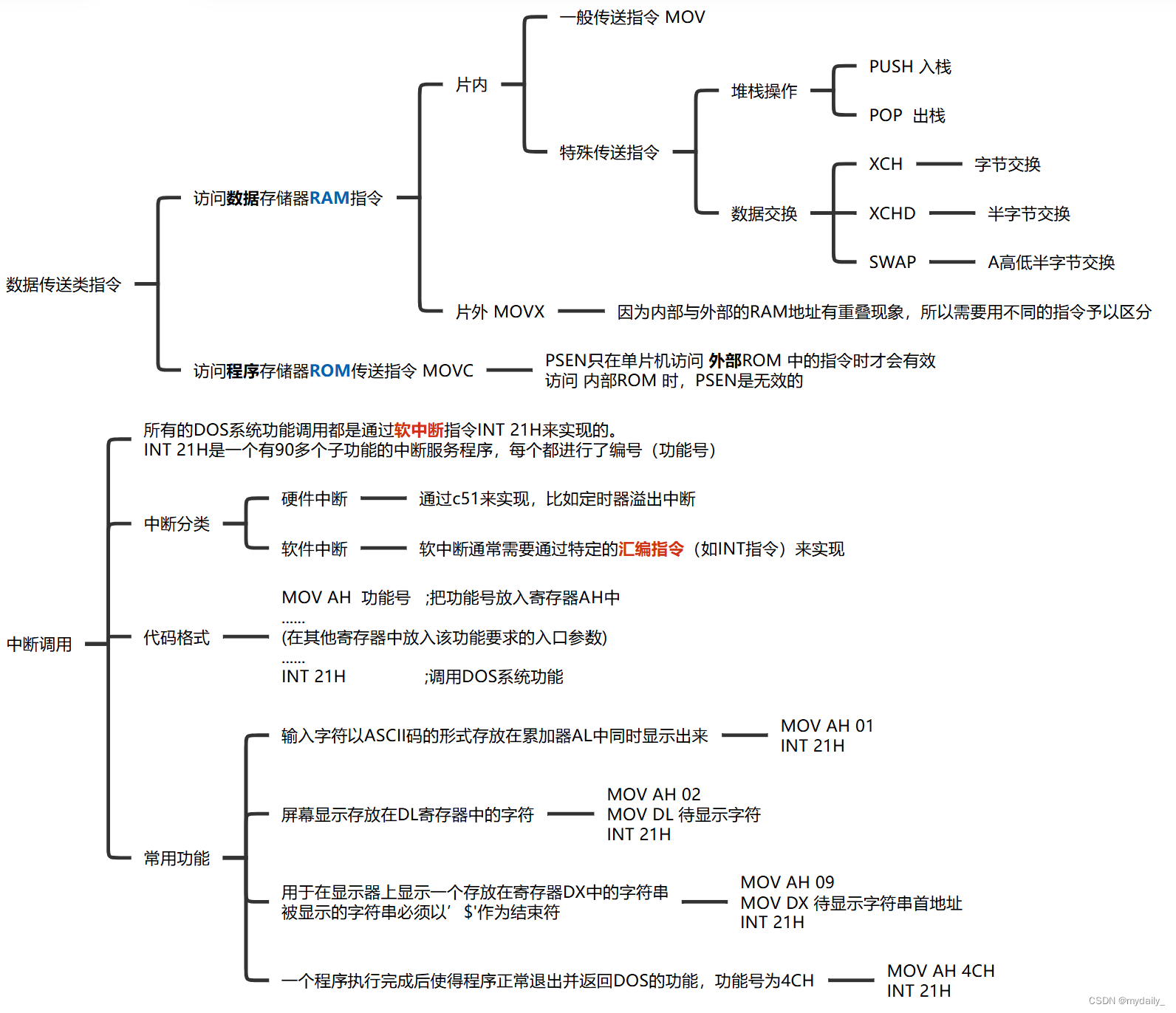
微机原理与单片机 知识体系梳理
单片机笔记分享 我个人感觉单片机要记的东西很多,也很琐碎,特别是一些位、寄存器以及相关作用等,非常难以记忆。因此复习时将知识点整理在了一起做成思维导图,希望对大家有所帮助。内容不是很多,可能有些没覆盖全&…...

Python基础语法:访问器@property和修改器@xxx.setter
一、简介 访问器和修改器也是装饰器的一种。 property: 访问器,getter xxx.setter: 修改器,setter 访问器和修改器的根本目的是想将属性私有化,提供getter&setter去访问。 访问器和修改器能够做到访问属性其实在调用getter方法࿰…...

微信小程序3D开发框架技术对比:XR-Frame与threejs-miniprogram
随着微信小程序逐步支持3D渲染与AR能力,开发者面临两个主要官方方案:自研的XR-Frame和适配Three.js的threejs-miniprogram。本文将从架构设计、渲染机制、功能集成、开发模式及适用场景等维度进行技术分析,为技术选型提供参考。一、XR-Frame&…...

贵阳婚礼西服定制攻略:面料、工艺、版型避坑指南
婚礼西装是男士婚礼造型的核心,区别于日常商务正装,婚礼西服更看重版型精致度、面料质感、上身挺拔感以及镜头适配度。在贵阳备婚的新人,大多会放弃成品西装,选择专属定制服务。但本地婚礼西服定制市场参差不齐,很多新…...
)
CentOS服务器上VNC连接失败?手把手教你排查并修复个人端口问题(附重启命令)
CentOS服务器VNC连接故障深度排查指南:从原理到实战当你在深夜赶项目时,突然发现VNC连接不上服务器,那种焦虑感我深有体会。去年参与半导体器件仿真项目时,我也曾被这个问题困扰整整两天。本文将分享一套经过实战检验的排查方法论…...

账务台账数据
银行里说的 “账务台账数据”,本质就是按会计规则把每笔业务逐笔、分户、分科目记下来的完整明细流水 余额 辅助信息,核心是 “可逐笔追溯、可对账、可审计” 的一套明细数据。下面用通俗、具体的方式拆开说:一、银行 “账务台账” 到底是什…...

Keil µVision链接器错误204解决方案
1. 问题现象与背景解析最近在使用Keil Vision进行嵌入式开发时,不少工程师遇到了一个令人头疼的链接器错误。具体表现为编译时出现"FATAL ERROR 204: INVALID KEYWORD"的致命错误,错误位置指向链接器控制文件中的特定行。这个问题在C166和C51两…...

Unity iOS构建报错SDK version is 0的根因与精准修复
1. 这个报错不是Unity在“发脾气”,而是工程配置在“装死”刚接手一个老项目,打开Unity编辑器,点Build Settings准备打包iOS,结果弹出一行红字:“SDK version is 0, cannot build”。我第一反应是——这什么鬼…...

武汉国电华美16875kVA串联谐振试验装置,这手活儿细
在超高压变电站和长距离电缆的现场,交流耐压试验是检验设备绝缘的“最后一关”。这位老师傅经手过不少大工程,他说,面对GIS、大型变压器这些“大块头”电容性试品,能不能顺利“过关”,往往就看串联谐振装置顶不顶得住。…...

Vue2-Verify:解决前端验证码安全性与用户体验平衡问题的技术方案实现
Vue2-Verify:解决前端验证码安全性与用户体验平衡问题的技术方案实现 【免费下载链接】vue2-verify vue的验证码插件 项目地址: https://gitcode.com/gh_mirrors/vu/vue2-verify 在当今Web应用开发中,验证码作为防止自动化攻击的关键安全组件&…...

因果推断与机器学习融合:量化分析社会运动中镇压与抗议的动态关系
1. 项目概述:当数据科学遇见社会运动如果你研究过社会运动,尤其是那些看似突然爆发、席卷全国的抗议浪潮,你可能会被一个核心问题困扰:国家机器的镇压,究竟是浇灭火焰的冷水,还是火上浇油的催化剂ÿ…...